 電子發(fā)燒友App
電子發(fā)燒友App


無論是在圖像測(cè)量或者機(jī)器視覺應(yīng)用中,相機(jī)參數(shù)的標(biāo)定都是非常關(guān)鍵的環(huán)節(jié),其標(biāo)定結(jié)果的精度及算法的穩(wěn)定性直接影響相機(jī)工作產(chǎn)生結(jié)果的準(zhǔn)確與穩(wěn)定。
什么是相機(jī)標(biāo)定?
在圖像測(cè)量過程以及機(jī)器視覺應(yīng)用中,為確定空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系,必須建立相機(jī)成像的幾何模型,這些幾何模型參數(shù)就是相機(jī)參數(shù)。
在大多數(shù)條件下這些參數(shù)必須通過實(shí)驗(yàn)與計(jì)算才能得到,這個(gè)求解參數(shù)的過程就稱之為相機(jī)標(biāo)定。
計(jì)算機(jī)視覺的基本任務(wù)之一是依據(jù)相機(jī)獲取的圖像信息計(jì)算三維空間中物體的幾何信息,并由此重建和識(shí)別物體。我們用簡(jiǎn)單的數(shù)學(xué)模型來表達(dá)復(fù)雜的成像過程,并且求出成像的反過程。標(biāo)定之后的雙目相機(jī),可以進(jìn)行三維場(chǎng)景的重建,這是計(jì)算機(jī)視覺的一大分支。
經(jīng)典的針孔相機(jī)模型
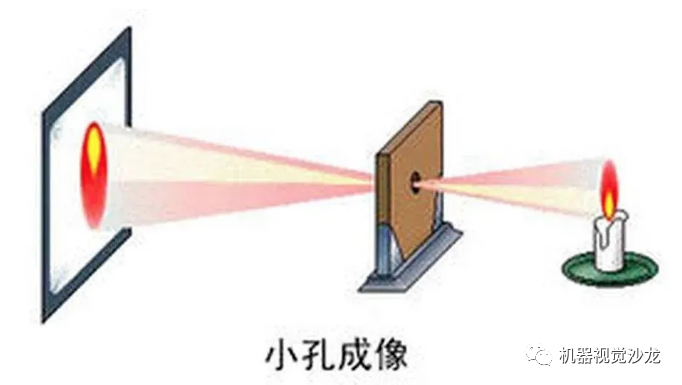
小孔成像的實(shí)驗(yàn)大家都很熟悉,如上圖,依據(jù)這個(gè)實(shí)驗(yàn)也可以抽象出一個(gè)經(jīng)典的針孔相機(jī)模型,如下圖:
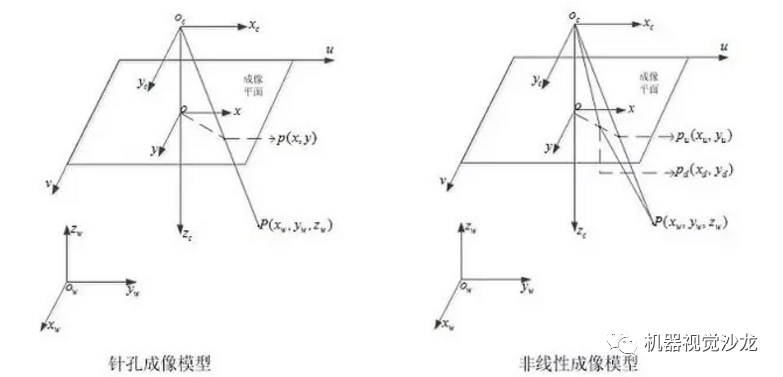
相機(jī)標(biāo)定常用到四種坐標(biāo)系,分別為:
1)像素坐標(biāo)系(u,v):描述物體成像后的像點(diǎn)在數(shù)字圖像上(相片)的坐標(biāo),單位為個(gè)(像素?cái)?shù)目)。
2)成像平面坐標(biāo)系(x,y):描述成像過程中物體從相機(jī)坐標(biāo)系到圖像坐標(biāo)系的投影透射關(guān)系,單位為m。
3)相機(jī)坐標(biāo)系(xc,yc, ?zc):原點(diǎn)落在相機(jī)上的三維坐標(biāo)系,單位為m。
4)世界坐標(biāo)系(xw,yw, ?zw):用戶定義的三維世界的坐標(biāo)系,為了描述目標(biāo)物在真實(shí)世界里的位置而被引入,單位為m。
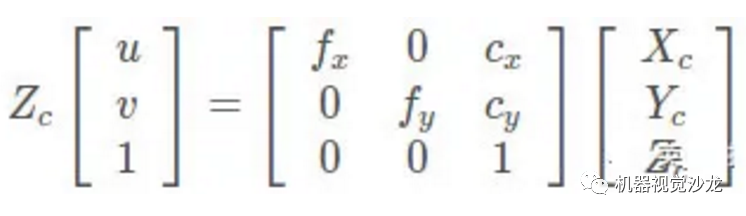
世界坐標(biāo)系到相機(jī)坐標(biāo)系的轉(zhuǎn)換關(guān)系今天暫不討論,我們把重點(diǎn)放在相機(jī)坐標(biāo)系到成像平面坐標(biāo)系的轉(zhuǎn)換關(guān)系上。
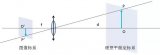
上文中小孔成像實(shí)驗(yàn)的成像過程可以描述為一點(diǎn)通過針孔相機(jī)模型的示意圖(如圖A)。為了在數(shù)學(xué)上更方便描述,我們將相機(jī)坐標(biāo)系和圖像坐標(biāo)系位置對(duì)調(diào),變成圖B所示的布置方式:
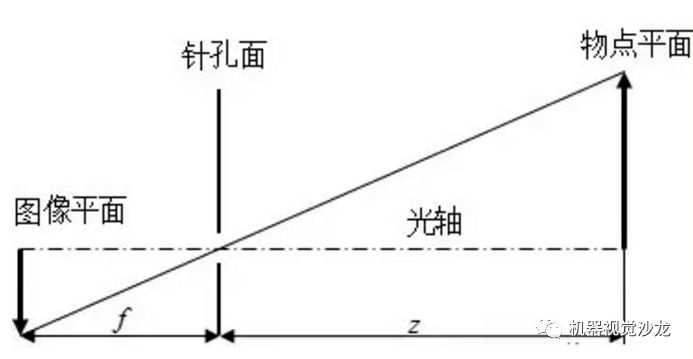
圖A
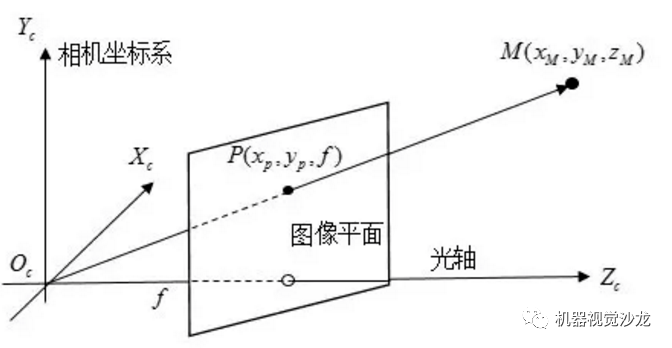
圖B
經(jīng)過一系列推導(dǎo),我們就可以得到一個(gè)結(jié)果轉(zhuǎn)化公式:
透鏡的畸變
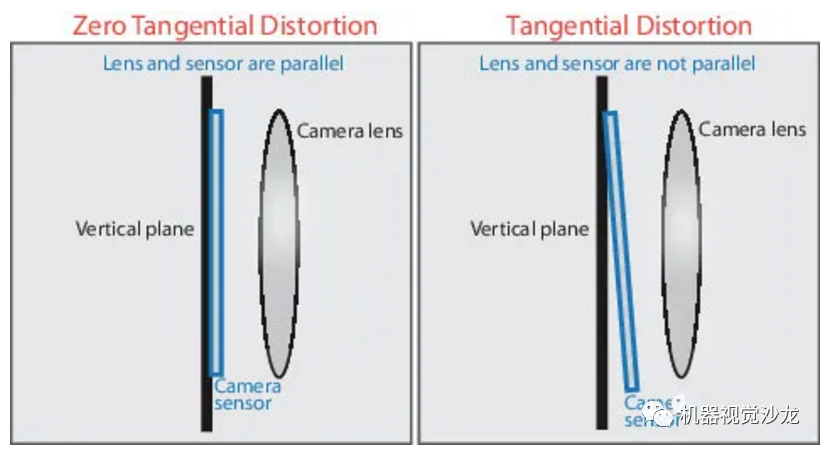
透鏡的畸變主要分為徑向畸變和切向畸變:
徑向畸變就是沿著透鏡半徑方向分布的畸變,產(chǎn)生原因是光線在遠(yuǎn)離透鏡中心的地方比靠近中心的地方更加彎曲,徑向畸變主要包括桶形畸變和枕形畸變兩種。以下分別是枕形和桶形畸變示意圖。

切向畸變是由于透鏡本身與圖像平面不平行而產(chǎn)生的,這種情況多是由于透鏡被粘貼到鏡頭模組上的安裝偏差導(dǎo)致。
常用的相機(jī)標(biāo)定方法
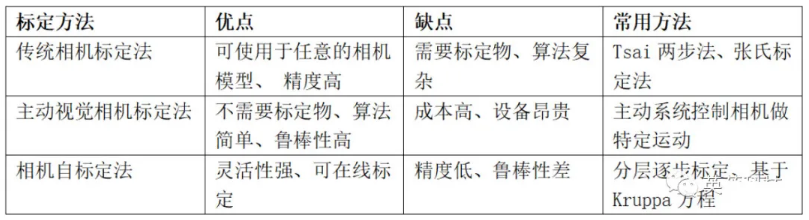
常用的相機(jī)標(biāo)定方法有:傳統(tǒng)相機(jī)標(biāo)定法、主動(dòng)視覺相機(jī)標(biāo)定方法、相機(jī)自標(biāo)定法。
1)傳統(tǒng)相機(jī)標(biāo)定法
傳統(tǒng)相機(jī)標(biāo)定法需要使用尺寸已知的標(biāo)定物,通過建立標(biāo)定物上坐標(biāo)已知的點(diǎn)與其圖像點(diǎn)之間的對(duì)應(yīng),利用一定的算法獲得相機(jī)模型的內(nèi)外參數(shù)。根據(jù)標(biāo)定物的不同可分為三維標(biāo)定物和平面型標(biāo)定物。傳統(tǒng)相機(jī)標(biāo)定法在標(biāo)定過程中始終需要標(biāo)定物,且標(biāo)定物的制作精度會(huì)影響標(biāo)定結(jié)果。
2)主動(dòng)視覺相機(jī)標(biāo)定法
基于主動(dòng)視覺的相機(jī)標(biāo)定法是指已知相機(jī)的某些運(yùn)動(dòng)信息對(duì)相機(jī)進(jìn)行標(biāo)定。該方法不需要標(biāo)定物,但需要控制相機(jī)做某些特殊運(yùn)動(dòng),利用這種運(yùn)動(dòng)的特殊性可以計(jì)算出相機(jī)內(nèi)部參數(shù)。基于主動(dòng)視覺的相機(jī)標(biāo)定法的優(yōu)點(diǎn)是算法簡(jiǎn)單,往往能夠獲得線性解,故魯棒性較高,缺點(diǎn)是系統(tǒng)的成本高、實(shí)驗(yàn)設(shè)備昂貴、實(shí)驗(yàn)條件要求高,而且不適合于運(yùn)動(dòng)參數(shù)未知或無法控制的場(chǎng)合。
3)相機(jī)自標(biāo)定法
相機(jī)自標(biāo)定算法主要是利用場(chǎng)景中的一些平行或者正交的信息。其中空間平行線在相機(jī)圖像平面上的交點(diǎn)被稱為消失點(diǎn),它是射影幾何中一個(gè)非常重要的特征,所以很多學(xué)者研究了基于消失點(diǎn)的相機(jī)自標(biāo)定方法。自標(biāo)定方法靈活性強(qiáng),可對(duì)相機(jī)進(jìn)行在線定標(biāo)。但由于它是基于絕對(duì)二次曲線或曲面的方法,其算法魯棒性差。
視覺鏡頭基礎(chǔ)知識(shí)
為什么需要鏡頭?
肉眼結(jié)構(gòu):
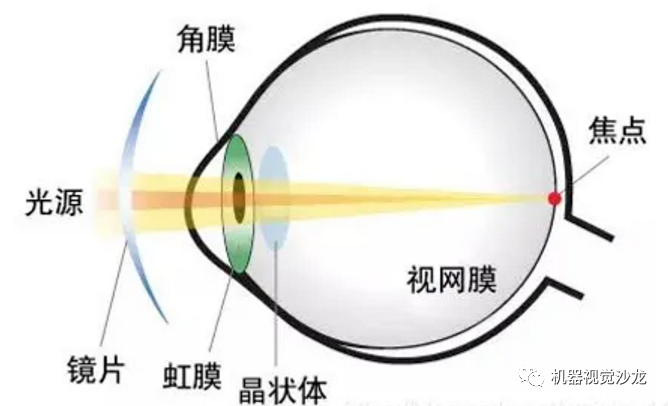
鏡頭相當(dāng)于充當(dāng)晶狀體這一環(huán)節(jié),簡(jiǎn)而言之,鏡頭主要的作用就是聚光。為什么要聚光?比如說在大晴天用放大鏡生火,你會(huì)發(fā)現(xiàn)陽(yáng)光透過放大鏡聚集到一點(diǎn)上,也就是說,想通過一塊小面積的芯片去承載這么一片區(qū)域就不得不使用鏡頭聚焦。
鏡頭內(nèi)部結(jié)構(gòu)
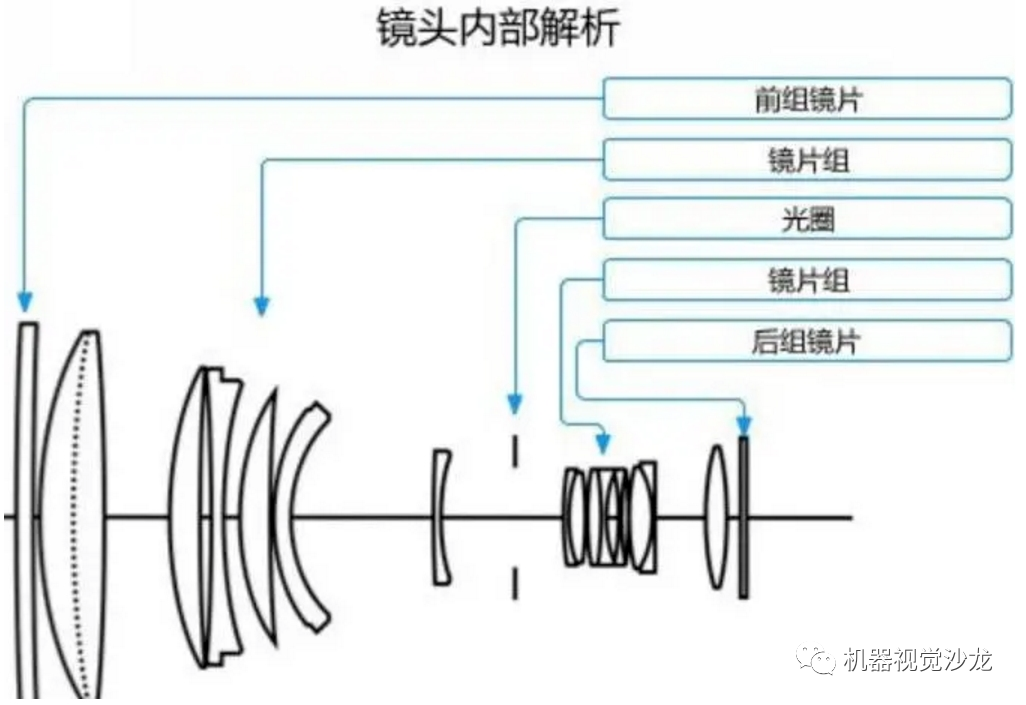
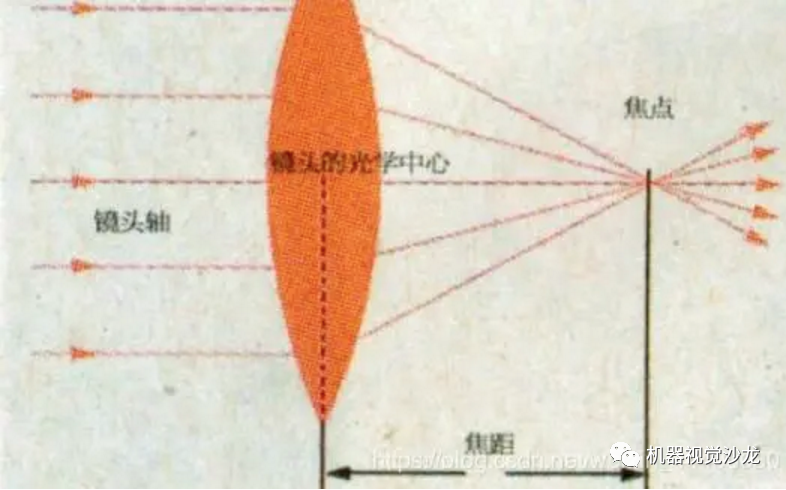
焦距
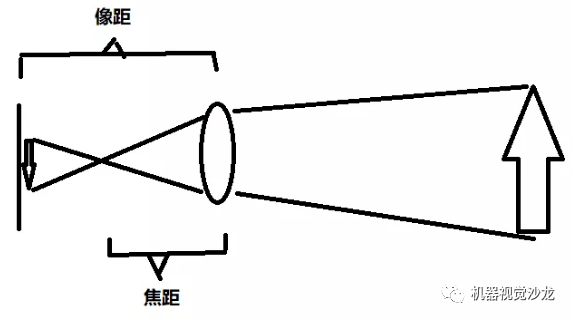
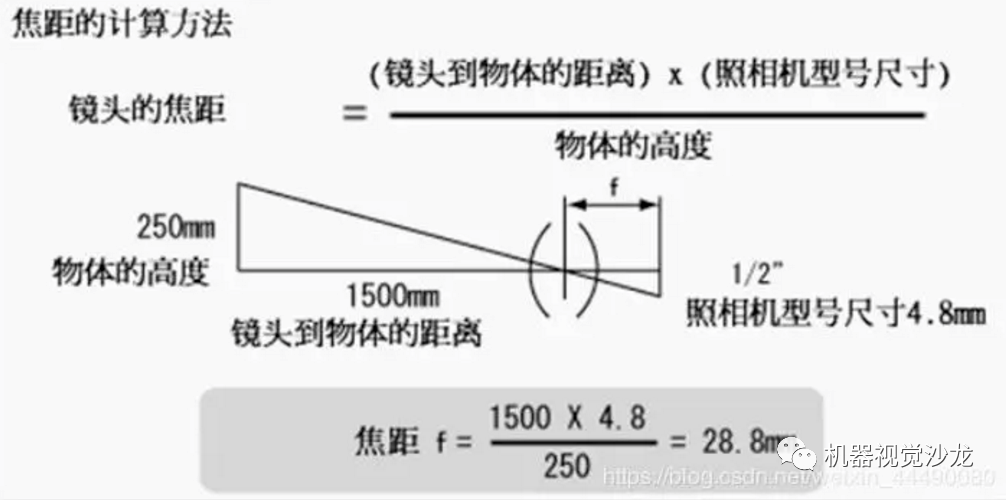
焦距是從鏡頭的中心點(diǎn)到膠平面上所形成的清晰影像之間的距離。焦距的大小決定著視角的大小, 焦距數(shù)值小,視角大,所觀察的范圍也大;焦距數(shù)值大,視角小,觀察范圍小。根據(jù)焦距能否調(diào)節(jié),可分為定焦鏡頭和變焦鏡頭兩大類。
成像的條件:焦距 < 像距 < 2倍 焦距
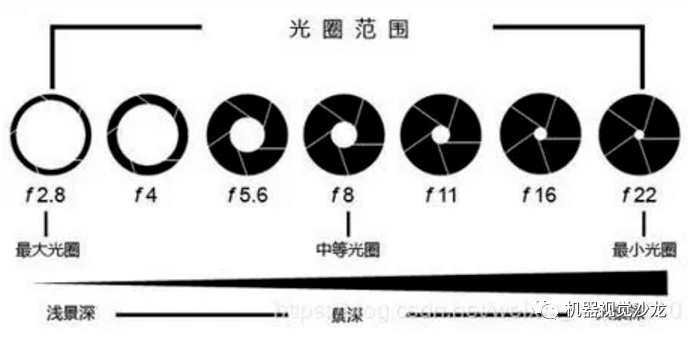
光圈
光圈是一個(gè)用來控制光線透過鏡頭,進(jìn)入機(jī)身內(nèi)感光面光量的裝置,它通常是在鏡頭內(nèi)。
景深
景深(DOF),在聚焦完成后,焦點(diǎn)前后的范圍內(nèi)所呈現(xiàn)的清晰圖像,這一前一后的距離范圍,便叫做景深。
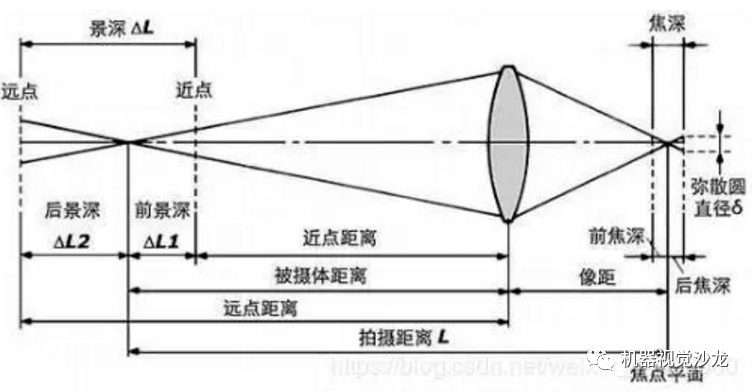
光圈、鏡頭、及拍攝物的距離是影響景深的重要因素。
1)光圈越大(f值),景深越淺,光圈越小(f值)景深越深。
2)焦距越長(zhǎng),景深越淺、反之景深越深。
3)主體越近,景深越淺,主體越遠(yuǎn),景深越深
曝光
是指在攝影過程中進(jìn)入鏡頭照射在感光元件上的光量,由光圈、快門、感光度的組合來控制。
視場(chǎng)角
視場(chǎng)角在光學(xué)工程中又稱視場(chǎng),視場(chǎng)角的大小決定了光學(xué)儀器的視野范圍。
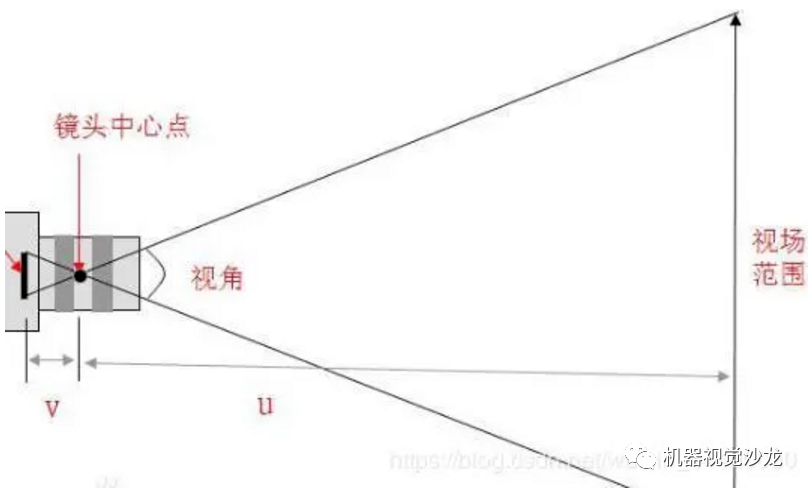
一般視場(chǎng)角越大視野范圍越大,視場(chǎng)角越小視野范圍越小。
視場(chǎng)角大小因焦距而變化,焦距越近視場(chǎng)角越大,焦距越遠(yuǎn)視場(chǎng)角越小。
分辨率
分辨率代表鏡頭記錄物體細(xì)節(jié)的能力, 以每毫米里面能夠分辨黑白對(duì)線的數(shù)量為計(jì)量單位 :“線對(duì)/ 毫米”(lp/mm)。分辨率越高的鏡頭成像越清晰。
數(shù)值孔徑
數(shù)值孔徑等于由物體與物鏡間媒質(zhì)的折射率 n 與物鏡孔徑角的一半(a2)的正弦值的乘積,計(jì)算公式為 N.A=n*sin a/2 。數(shù)值孔徑與其它光學(xué)參數(shù)有著密切的關(guān)系, 它與分辨率成正比, 與放大率成正比。也就是說數(shù)值孔徑,直接決定了鏡頭分辨率, 數(shù)值孔徑越大,分辨率越高,否則反之。
后背焦
準(zhǔn)確來說, 后倍焦是相機(jī)的一個(gè)參數(shù), 指相機(jī)接口平面到芯片的距離。但在線掃描鏡頭或者大面陣相機(jī)的鏡頭選型時(shí), 后倍焦是一個(gè)非常重要的參數(shù),因?yàn)樗苯佑绊戠R頭的配置。不同廠家的相機(jī),哪怕接口一樣也可能有不同的后倍焦。
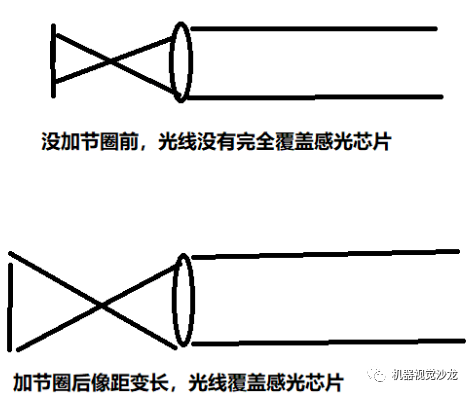
節(jié)圈的作用
加與不加節(jié)圈都不會(huì)影響相機(jī)的焦距,焦距本身是鏡頭固有的屬性。
相機(jī)接圈,可以增大焦平面到鏡頭的距離,使鏡頭拍攝物體的距離更近,相當(dāng)于微距攝影,成像更大。
一般來說,鏡頭畸變實(shí)際上是光學(xué)透鏡固有的透視失真的總稱,也就是因?yàn)橥敢曉蛟斐傻氖д妫@種失真對(duì)于照片的成像質(zhì)量是非常不利的,但因?yàn)檫@是透鏡的固有特性(凸透鏡匯聚光線、凹透鏡發(fā)散光線),所以無法消除,只能改善。

枕形畸變

枕形畸變(Pincushion Distortion),又稱枕形失真,它是由鏡頭引起的畫面向中間“收縮”的現(xiàn)象。我們?cè)谑褂瞄L(zhǎng)焦鏡頭或使用變焦鏡頭的長(zhǎng)焦端時(shí),最容易察覺枕形失真現(xiàn)象。
桶形畸變
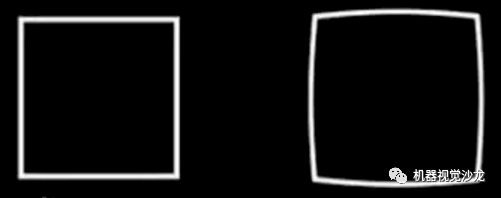
桶形畸變(Barrel Distortion),又稱桶形失真,是由鏡頭中透鏡物理性能以及鏡片組結(jié)構(gòu)引起的成像畫面呈桶形膨脹狀的失真現(xiàn)象。我們?cè)谑褂脧V角鏡頭或使用變焦鏡頭的廣角端時(shí),最容易察覺桶形失真現(xiàn)象。
遠(yuǎn)心鏡頭
遠(yuǎn)心鏡頭(Telecentric),主要是為糾正傳統(tǒng)工業(yè)鏡頭視差而設(shè)計(jì),它可以在一定的物距范圍內(nèi),使得到的圖像放大倍率不會(huì)變化,這對(duì)被測(cè)物不在同一物面上的情況是非常重要的應(yīng)用。遠(yuǎn)心鏡頭由于其特有的平行光路設(shè)計(jì)一直為對(duì)鏡頭畸變要求很高的機(jī)器視覺應(yīng)用場(chǎng)合所青睞。
?
遠(yuǎn)心鏡頭光路的特點(diǎn)是,幾乎進(jìn)入到鏡頭的光都是強(qiáng)反射光。
非遠(yuǎn)心鏡頭成像效果:

非遠(yuǎn)心鏡頭成像效果:

遠(yuǎn)心鏡頭成像效果:

遠(yuǎn)心鏡頭主要彌補(bǔ)非遠(yuǎn)心鏡頭的以下特點(diǎn):
1、由于被測(cè)量物體不在同一個(gè)測(cè)量平面,而造成放大倍率的不同;
2、鏡頭畸變大
3、視差也就是當(dāng)物距變大時(shí),對(duì)物體的放大倍數(shù)也改變;
4、鏡頭的解析度不高;
5、由于視覺光源的幾何特性,而造成的圖像邊緣位置的不確定性。?
遠(yuǎn)心和非遠(yuǎn)心各自的優(yōu)點(diǎn):
普通鏡頭優(yōu)點(diǎn):成本低,實(shí)用,用途廣。
普通鏡頭缺點(diǎn):放大倍率會(huì)有變化,有視差。
普通鏡頭應(yīng)用:大物體成像。
遠(yuǎn)心鏡頭的優(yōu)點(diǎn):放大倍數(shù)恒定,不隨景深變化而變化,無視差。
遠(yuǎn)心鏡頭的缺點(diǎn):成本高,尺寸大,重量重。
遠(yuǎn)心鏡頭的應(yīng)用:度量衡方面,基于CCD方面的測(cè)量,微晶學(xué)。
當(dāng)檢查物體遇到以下6中情況時(shí),最好選用遠(yuǎn)心鏡頭:
1、當(dāng)需要檢測(cè)有厚度的物體時(shí)(厚度>1/10 FOV直徑);
2、需要檢測(cè)不在同一平面的物體時(shí);
3、當(dāng)不清楚物體到鏡頭的距離究竟是多少時(shí);
4、當(dāng)需要檢測(cè)帶孔徑、三維的物體時(shí);
5、當(dāng)需要低畸變、圖像效果亮度幾乎完全一致時(shí);
6、當(dāng)缺陷只在同一方向平行照明下才能檢測(cè)到時(shí)。
編輯:黃飛
?































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論