 電子發燒友App
電子發燒友App


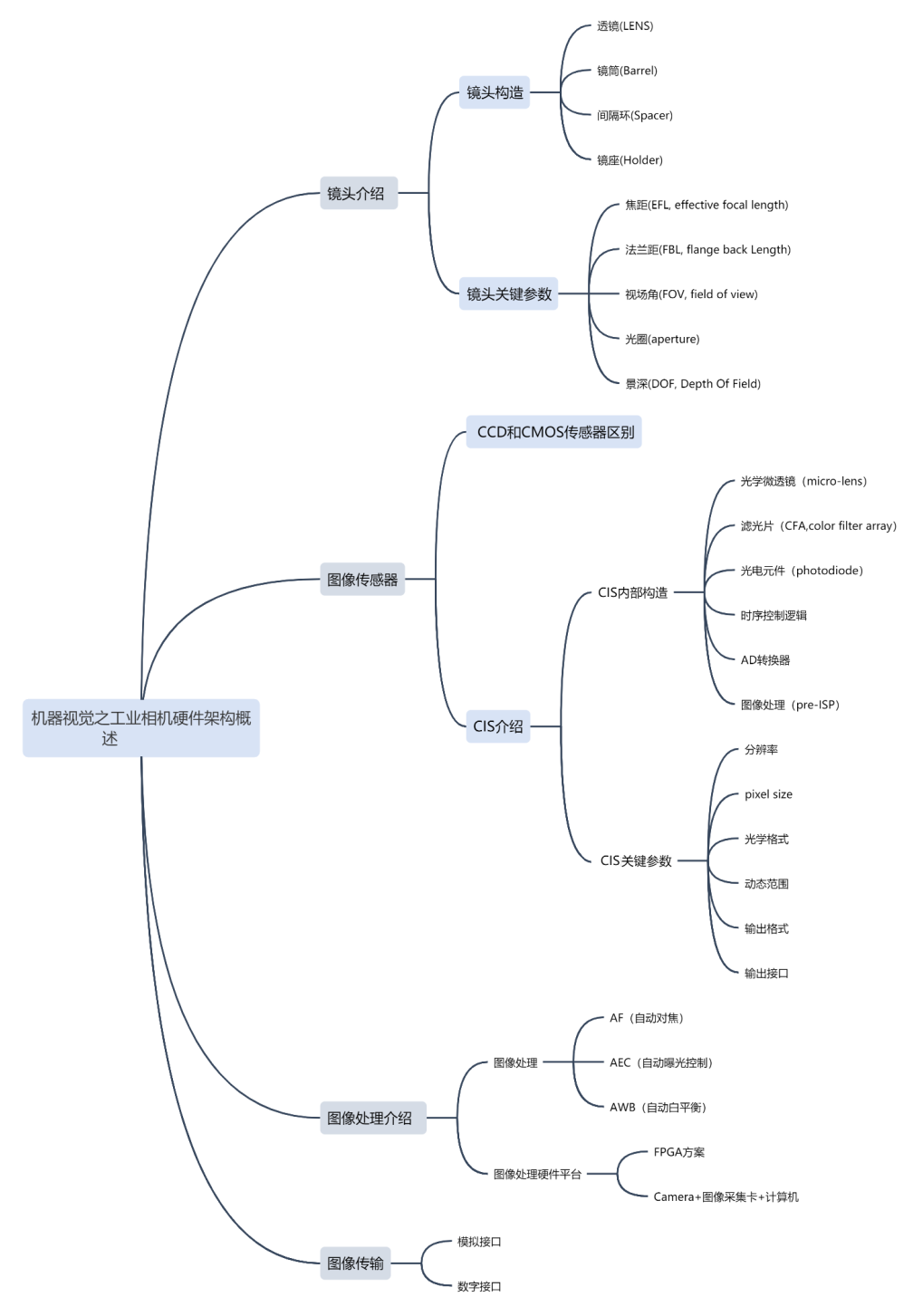
一、相機介紹及選型方法
1.工業相機介紹
工業相機與我們手機上面的相機或者我們單反相機不同,工業相機它能夠使用各種惡劣的工作環境,比如說高溫,高壓,高塵等。工業相機主要有面陣相機和線陣相機,線陣相機主要用于檢測精度要求很高,運動速度很快的場景,而面陣相機應用更為廣泛。
線陣相機
這種相機呈現出線狀,一般上只在兩種情況下使用這種相機,
一是被檢測視野為細長的帶狀,多用在滾筒上檢測;二是需要很大的視野和很高的精準度。我們看到的線陣相機的物體二維圖像是通過多次線陣掃描組合形成的。
線陣相機的優點就是可以做很多一維像元數,而且總像元數也比面陣相機少,像元尺寸比較靈活,幀幅數高,特別適用于一維動態目標的測量。
面陣相機
面陣相機機器視覺應用更加廣泛。面陣CCD的優點是可以直接獲取二維圖像信息,測量圖像直觀。可以短時曝光,利于搶拍動態景物,也可以拍靜態景物。由于我平時使用的基本都是面陣相機,所以這里主要介紹面陣相機的選型。
2.工業相機選型
(1)CCD/CMOS
如果拍攝目標是靜態不動的,為了節約成本,可考慮使用CMOS相機,而如果目標是運動的,則優先考慮CCD相機。如果是需要高速采集的,這里指的高速是很高的采集速度,而非指很高的運動速度,可以考慮CMOS相機,因為CMOS的采集速度會優于CCD。如果需要高質量的圖像,如進行尺寸測量,可以考慮CCD,在小尺寸的傳感器里,CCD的成像質量還是要優于CMOS的。CCD工業相機主要應用在運動物體的圖像提取,在視覺自動檢查的方案或行業中一般用CCD工業相機比較多。隨著CMOS技術的發展,CMOS工業相機由成本低,功耗低也應用越來越廣泛。
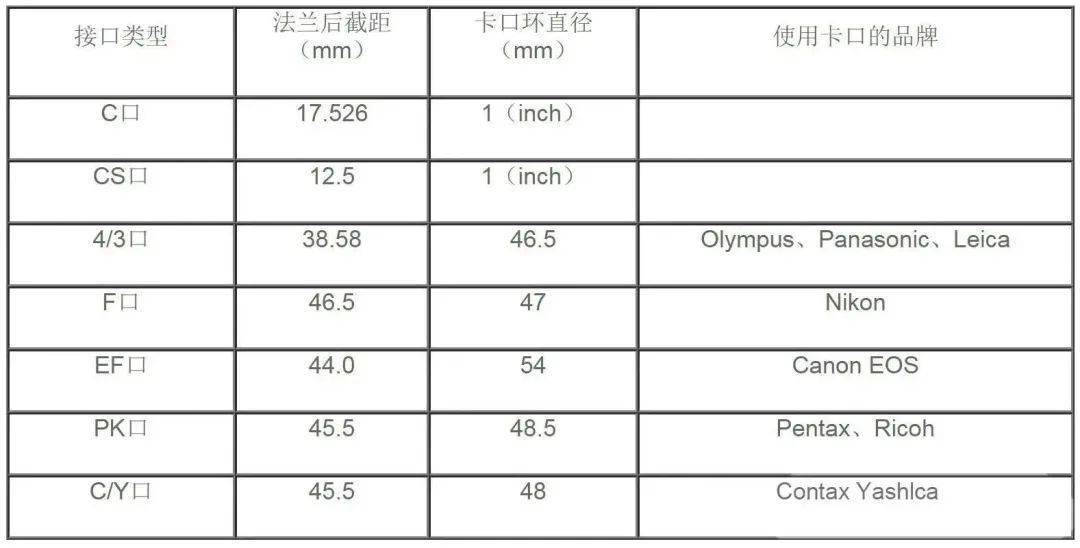
(2)接口:工業相機的前面就是用來接鏡頭,都是有專業的標準接口。它的后面,一般有兩個接口,一個是電源接口,一個是數據接口。?工業相機的接口分為:USB 2.0/3.0、CamerLink、Gige、1394a/1394b、CoaXPress等類型的接口。這里只介紹幾種常用的接口類型。
USB接口:支持熱拔熱插、使用便捷、標準統一、可連接多個設備、相機可通過USB線纜供電。但沒有標準的協議、主從結構,CPU占用率高、帶寬沒有保證。usb3.0的接口一般都是可以自供電。但是也可以再接一個電源,假如usb接口供電不穩定的話,那么就可以選擇外接電源來進行供電。
Gige千兆以太網接口:是一種基于千兆以太網通信協議開發的相機接口標準;適用于工業成像應用,通過網絡傳輸無壓縮視頻信號;拓展性好,傳輸數據長度最長可伸展至100m(轉播設備上可無限延長);帶寬達1Gbit,因此大量的數據可即時得到傳輸;?可使用標準的NIC卡(或PC上已默認安裝);經濟性好,可使用廉價電纜(可使用通用的Ethernet電纜(CAT-6)和標準的連接器;可以很容易集成,且集成費用低;可管理維護性及廣泛應用性。
Camerlink接口:?是一種串行通訊協議。采用LVDS接口標準,具有速度快、抗干擾能力強、功耗低。從Channel link技術上發展而來的,在Channel link技術基礎上增加了一些傳輸控制信號,并定義了一些相關傳輸標準。協議采用MDR-26針連接器。高速率,帶寬可達6400Mbps、抗干擾能力強、功耗低。
Gige接口簡單方便的進行多相機設置,支持100米線材輸出。Camera Link接口是專門針對高速圖像數據需求的標準接口。USB 3.0接口具有簡單易用,實時性好的特點。目前在機器視覺中,應用最廣泛的接口是Gige(以太網)接口,以太網接口在傳輸速度、距離、成本等方面較其他接口具有很大的優勢。
(3)分辨率
其實從這里才算是正式開始相機的選型。在介紹選型方法之前,有必要介紹一下分辨率、像素、精度、像元尺寸、傳感器尺寸之間的關系,不少人總容易在這里弄混。
相機分辨率,相機每次采集圖像的像素點數,也是指這個相機總共有多少個感光晶片,通常用萬個為單位表示,以矩陣排列,通常相機產品在介紹時會說有千萬像素、百萬像素等。例如百萬像素相機的像素矩陣為WxH=1000x1000。像素的大小是沒有固定長度值的,不同設備上1個像素色塊的大小是不一樣的。每一個小方塊都有一個明確的位置和被分配的色彩數值,而這些小方塊的顏色和位置決定了該圖像所呈現出來的樣子。
(4)傳感器尺寸
傳感器(CCD/CMOS)尺寸的表示方法大惑不解,因為像1/1.8英寸、2/3英寸之類的尺寸,既不是任何一條邊的尺寸,也不是其對角線尺寸,看著這樣的尺寸,往往難以形成具體尺寸大小的概念。
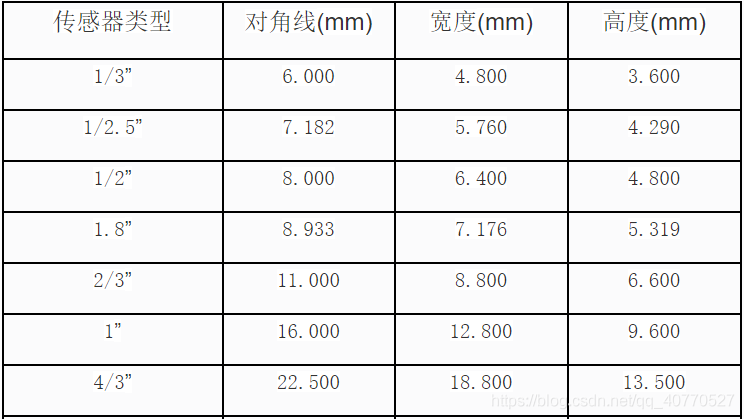
靶面尺寸=對角線尺寸
靶面面積=傳感器寬度x傳感器高度
圖片摘自 :https://www.sohu.com/a/217733287_665222
傳感器尺寸大,在同樣的像素密度下,像元尺寸也會大,這樣會增加每個像元的感光面積,對提高圖像的質量有益。傳感器的尺寸,還能決定視野大小與工作距離。在同樣的工作距離、同樣的鏡頭下,傳感器尺寸大,可以拍攝更大的視野。
(5)像元尺寸
? ? ? ?有了相機分辨率和傳感器尺寸,就能夠計算像元尺寸。
像元尺寸=傳感器尺寸/分辨率(像元個數)
這樣就會分別得到寬度及高度上的像元尺寸
像元尺寸指芯片像元陣列上每個像元的實際物理尺寸,例如3.75umx3.75um 等。像元尺寸從某種程度上反映了芯片的對光的響應能力,像元尺寸越大,能夠接收到的光子數量越多,在同樣的光照條件和曝光時間內產生的電荷數量越多。對于弱光成像而言,像元尺寸是芯片靈敏度的一種表征。是不是有些迷惑了,聽起來感覺和前面所說的相機分辨率很像,前面的相機分辨率值越小,分辨率高,這里是像元尺寸越大, 靈敏度越高。是兩個不同的概念。
?
(6)精度
精度指一個像素表示實際物體的大小,用(um*um)/pixel表示。注意,像元尺寸并不等于精度,像元尺寸是相機機械構造時固定的,而精度與相機視野有關,是變化的。精度值越小,精度越高。
單個像素對應的大小=視野寬/寬度分辨率 =視野高/高度分辨率
補充:考慮到相機邊緣視野的畸變以及系統的穩定性要求,一般不會只用一個像素單位對應一個測量精度值,有時候根據光源的不同會提高計算的值,使用背光源的精度為1~3個像素,使用正光源的精度為3~5個像素:
例如:使用500W像素相機 分辨率為2500*2000 視野為100mm*80mm
? ? ? ? ? ?單個像素對應大小 = 0.04mm
? ? ? ? ? 背光的精度為 0.04mm~0.12mm
? ? ? ? ? 正光的精度為 0.12mm~0.20mm
注意這里的意思,也就是說當我們已知精度去計算分辨率時,往往要選擇比計算值更大的分辨率相機,才能滿足要求。
(7)圖片分辨率
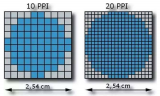
圖像分辨率比較好理解,就是單位距離內的像用多少個像素來顯示,與精度意義相同,只是表示方法不同。
? ? 選型基本原則
當視野大小即檢測目標大小一定時(選相機時一般將目標大小視為視野大小),相機分辨率越大,精度越高,圖像分辨率也越大;當視野大小不確定時,不同分辨率相機也能達到同樣的精度,這時選擇大像素相機可以擴大視野范圍,減少拍攝次數,提高測試速度。若1個是1百萬像素,另1個是3百萬像素,當清晰度相同(精度均為20um/pixel),第1個相機的FOV是20mm×20mm=400平方mm,第二個相機的FOV是1200平方mm,拍攝生產線上同樣數量的目標,假設第1個相機要拍攝30個圖像,第2個相機則只需拍攝10個圖像就可以了。
二、鏡頭介紹及選型方法
1.鏡頭介紹
鏡頭作為機器的眼睛,其主要作用是將目標物體的圖像聚焦在圖像傳感器(相機)的光敏器件上。數據系統所處理的所有圖像信息均需要通過鏡頭得到,鏡頭的質量直接影響到視覺系統的整體性能。
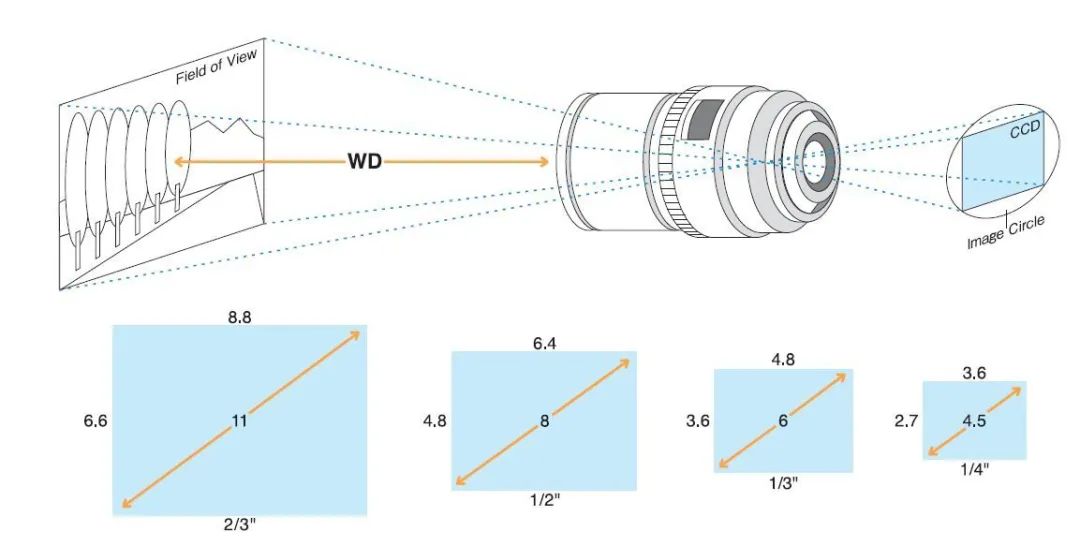
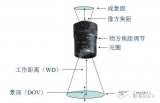
(1)工作距離(Working Distance)
工作距離指的是鏡頭的最下端到景物之間的距離。一般的鏡頭是可以看到無限遠的,也就是說是沒有上限的。
我們需要注意的是“最小工作距離”在鏡頭上有兩個有刻度的調節圈,一個是調節光圈的,另一個是調焦的,在調焦的刻度圈上標有此鏡頭的工作距離從最近到最遠是多少。
(2)視場(Field of view, 即FOV,也叫視野范圍)
視野指的是鏡頭能看到的最大范圍,也就是鏡頭所能覆蓋的有效工作區域。
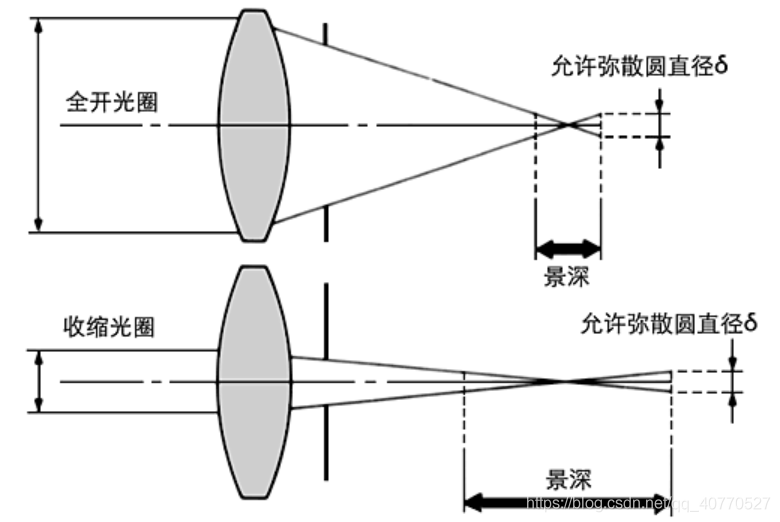
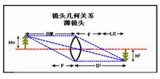
(3)景深(Depth of view,即DOF)
景深與視野相似,不同的是景深指的是縱深的范圍,視野指的是橫向的范圍。在最小工作距離到最大工作距離之間的范圍稱為景深,景深內的物體都可以清晰成像。景深一般可以通過光圈調節,光圈越小,景深越大。
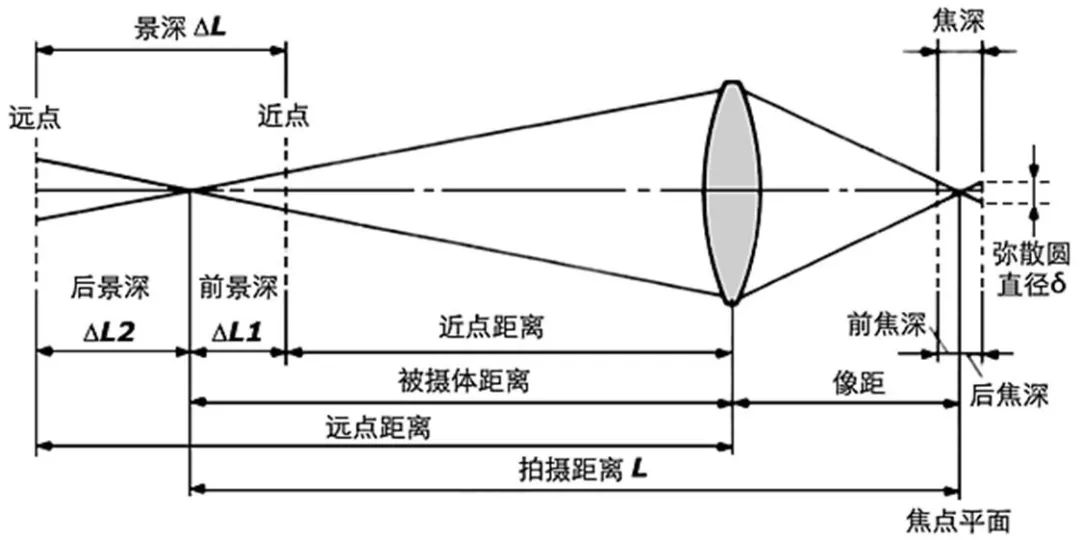
可成清晰像的最遠的物平面稱為遠景平面,它與對準平面的距離成為后景深△L1;能成清晰像的最近物平面稱為近景平面,它與對準平面的距離稱為前景深△L2;景深=前景深+后景深,景深計算公式為:
前景深ΔL1=FδL^2/(f^2+FδL) (1)
后景深ΔL2=FδL^2/(f^2-FδL) (2)
景深ΔL=ΔL1+ΔL2=(2f^2FδL^2)/(f^4-F^2δ^2L^2)
(由于第一次寫博客,還不太會編輯公式,L^2就是L的平方的意思)
δ——容許彌散圓直徑,f——鏡頭焦距,F——鏡頭的拍攝光圈值,L——對焦距離
ΔL1——前景深,ΔL2——后景深,ΔL——景深
從公式(1)和(2)可以看出,后景深 > 前景深。
由景深計算公式可以看出,景深與鏡頭使用光圈、鏡頭焦距、拍攝距離以及對像質的要求(表現為對容許彌散圓的大小)有關。這些主要因素對景深的影響如下(假定其他的條件都不改變)
(1)、鏡頭光圈:
光圈越大,景深越小;光圈越小,景深越大;
(2)、鏡頭焦距
鏡頭焦距越長,景深越小;焦距越短,景深越大;
(3)、拍攝距離
距離越遠,景深越大;距離越近,景深越小。
總結:對于對景深有要求的項目,盡可能使用小的光圈;在選擇放大倍率的鏡頭時,在項目許可下盡可能選用低倍率鏡頭。如果項目要求比較苛刻時,傾向選擇高景深的尖端鏡頭。
網上有些在線的景深計算器,有興趣的網友可以自行搜索查詢計算,以下是兩個景深的計算實例:
(1)、200/2.8對焦在5m時,f/2.8的景深:
δ=0.035mm,f=200mm, F=2.8,L=5000mm
計算得:ΔL1=60mm,ΔL2=62mm,ΔL=122mm
結論:該鏡頭在用f/2.8拍攝時,清晰范圍是從4.94m~5.062m,景深很淺。
(2)、200/2.8+2X=400/5.6對焦在5m時,f/5.6的景深:
δ=0.035mm,f=400mm,F=5.6,L=5000mm
ΔL1=30mm,ΔL2=31mm,ΔL=61mm
結論:該鏡頭在配合2X增距鏡后,主鏡頭用f/2.8拍攝時,景深是(1)的一半。
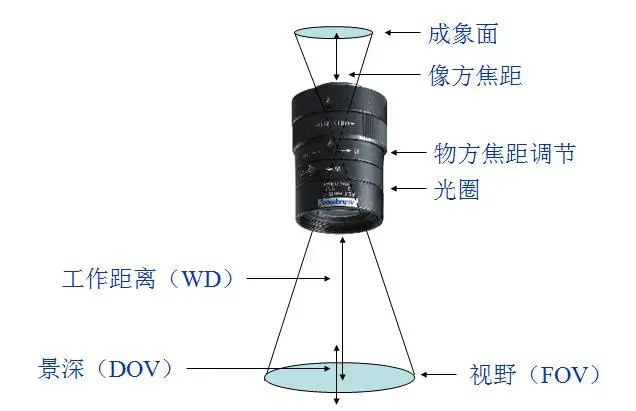
(4)焦距(focal length)
要了解焦距首先要知道成像面,那成像面又是什么呢?成像面是入射光通過鏡頭后所成像的平面,這個面是一個圓形。
焦距就是鏡頭到成像面的距離,一般你問廠家鏡頭的時候,廠家一般都會問你需要焦距是多少的鏡頭,比如:50mm鏡頭,8mm鏡頭還是75mm鏡頭等。這些就是鏡頭到成像面的距離,也就是焦距。單位是毫米。但是在實際使用中,往往需要相機標定,標定的主要參數就是相機焦距。對于工業鏡頭而言,一般都是使用定焦鏡頭,也就是焦距f通常都是固定的。工業鏡頭,一般有光圈、對焦圈兩個轉環,我們使用對焦圈來改變透鏡的位置時,其改變的距離有一定的限制。但這并不意味這我們使用的是變焦鏡頭。
(5)視角(visual angle)
視角顧名思義就是視線的角度,也就是鏡頭能看多“寬”。焦距越小,視角越大;最小工作距離越短,視野越大。
對于普通的鏡頭來說,選擇原則是:工作距離越近越好,鏡頭的畸變越小越好,視野越大越好。
(6)分辨率(resolution ratio)
圖像系統可以測到的受檢驗物體上的最小可分辨特征尺寸。在多數情況下,視野越小,分辨率越好。
(7)光圈:(Iris)
光圈是一個用來控制光線透過鏡頭進入機身內感光面光量的裝置,在拍攝高速運動物體時候,由于曝光時間短,需要使用大光圈。
光圈大小一般用F表示,以鏡頭焦距f和通光孔徑直徑D的比值來衡量,當光圈物理孔徑不變時,鏡頭中心與感光器件距離越遠,F值越大,光圈越小;反之,F值越小,光圈越大。
一般通過調整通光孔徑大小來調節光圈,完整的光圈數值系列如下:F1,F1.4,F2,F2.8,F4,F5.6,F8,F11,F16,F22,F32,F44,F64。
(8)鏡頭畸變
鏡頭在成像時,特別是用短焦距鏡頭拍攝大視場,圖像會產生形變,這種情況叫做鏡頭的畸變,這是由于鏡頭的光學結構和成像特性導致的,原因是由于視野中局部放大倍數不一致造成的圖像扭曲。
拍攝的視場越大,所用的鏡頭的焦距越短,畸變的程度就越明顯,一般有桶型畸變和枕型畸變兩種,可以通過圖像標定減弱這種平面畸變的影響。
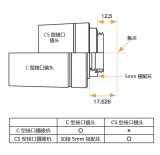
(9)接口及最大兼容CCD尺寸
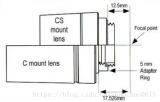
鏡頭接口只要可跟相機接口匹配安裝或可通過外加轉換口匹配安裝就可以了,其一般的接口是C口跟CS口,這兩者主要的區別是圖像傳感器與鏡頭之間的距離不同這兩者類型的接口沒有細分的,其C口的大小全都都一樣,;
所有鏡頭都只能在一定的范圍內清晰成像,最大兼容CCD尺寸是指鏡頭能支持的最大清晰成像的范圍。在實踐選擇相機和鏡頭時,要注意所選擇的鏡頭的最大兼容CCD尺寸要大于或等于相機芯片的尺寸。
2.鏡頭選型方法(含相機)
已知:被檢測物體大小為A×B,要求精度小于C,工作距離為D
(1). 計算短邊對應的像素數E=B/C,相機長邊和短邊的像素數都要大于E;
即相機最小分辨率為:E×E
這里并不能完全確定相機的傳感器尺寸,雖傳感器尺寸與視野等有一定關系,但沒有直接公式關系,因為鏡頭的選擇會依賴相機(分辨率、接口),后面可以根據鏡頭的選型反推這里相機是否正確。
這里可以暫定相機C接口,2/3英寸,得到相機傳感器短邊尺寸G
(2)可求得:
像元尺寸=傳感器尺寸/分辨率(像元個數)=G/E
放大倍率=所選相機傳感器短邊尺寸/相機短邊的視野范圍=G/B
由于相機確定,那么我們可以先確定需要的工業鏡頭是C接口,最少支持2/3",
(3)焦距=(工作距離D×相機傳感器短邊尺寸G)/物體寬度B? ? 單位:mm(焦距越小,視場角就越大,視野也就相應的更大,因為焦距一般有固定的值,如5mm,8mm,所以實際焦距可以相應選小一號的)
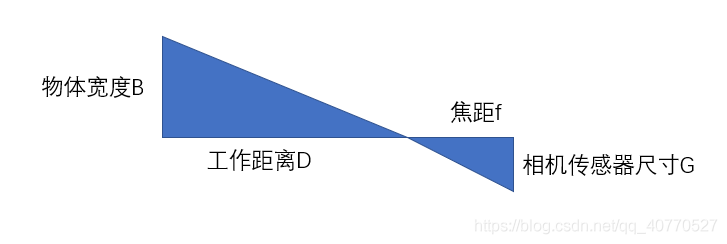
其實,由上圖關系得放大倍率還有另一種計算方法:
放大倍率=所選相機傳感器短邊尺寸/相機短邊的視野范圍=焦距/工作距離
那么,焦距=工作距離×放大倍數
考慮實際工作情況,更多采用的焦距計算公式為:焦距=工作距離×(1/放大倍數+1)=(工作距離*相機傳感器短邊尺寸)/(物體寬度+相機傳感器短邊尺寸)
驗證方法
因為視野范圍與精度是兩個矛盾的指標,以上計算以精度為標注進行選型(用的物體短邊B),可計算最終視野是否滿足長邊A:
長邊A
以上僅針對主要參數進行計算選擇,其他如畸變、景深、環境等,可根據實際要求進行選擇。
三、相機與鏡頭選取實際案例
1.相機選型實例(已定鏡頭選擇相機)
已知客戶的鏡頭的尺寸是1/3,接口是CS接口,視野大小為12*10mm要求精度為0.02mm,則應該選用多大分辨率相機?
計算方法:
(12/0.02)*(10/0.02)=30萬像素,但是如果是缺陷檢測通常不會只用一個像素表示一個精度,而是乘以3-4倍,即30*4=120萬像素。最低不少于120萬像素。
2.鏡頭選型實例(已定相機選擇鏡頭)
1、已知客戶觀察范圍為30mm*30mm,工作距離為100mm,CCD尺寸為1/3',那么需要多少焦距的鏡頭
計算方法:
1/3'=3.6mm(垂直) 芯片垂直方向的大小
f=(100*3.6)/30?
2.條形碼識別
目標寬度 = 30 毫米,拍攝距離 = 300 毫米,CCD型號 = 1/4" (CCD寬度 = 3.2 毫米)
焦距=(300*3.2)/(30+32)=28.9mm
(3)水果分類
目標高度 = 200 毫米,?拍攝距離 = 1000 毫米,CCD型號 = 1/3" (CCD高度 = 3.6 毫米)
焦距=(10000*3.6)/(200+3.6)=17.7mm
(4)車牌號碼識別
目標寬度 = 600 毫米,拍攝距離 = 10000 毫米,CCD型號 = 1/4" (CCD寬度 = 3.2 毫米)
焦距=(1000*3.2)/(600+3.2)=53mm
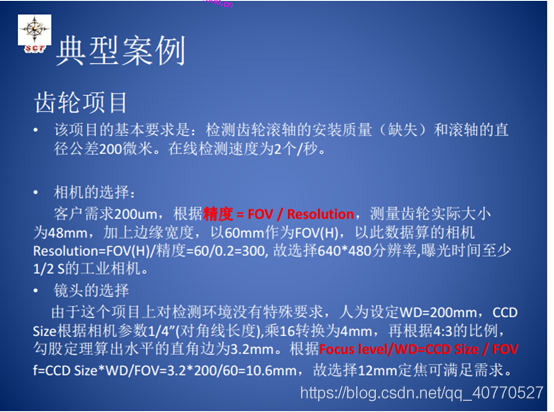
3.相機、鏡頭未知
編輯:黃飛
?

















 工商網監
工商網監
評論