 電子發燒友App
電子發燒友App


PART?01
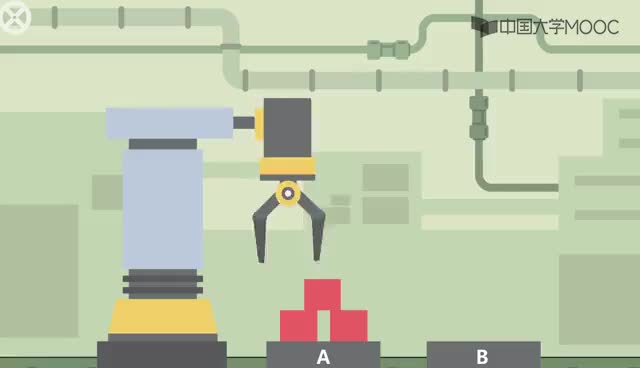
在自動化流水線中,機械手的應用比較廣泛,它是集多種工作方式于一身的典型案例。本節將以機械手自動控制為例,重點講解含多種工作方式的PLC控制系統的設計。
PART?02 機械手的控制要求及功能簡介
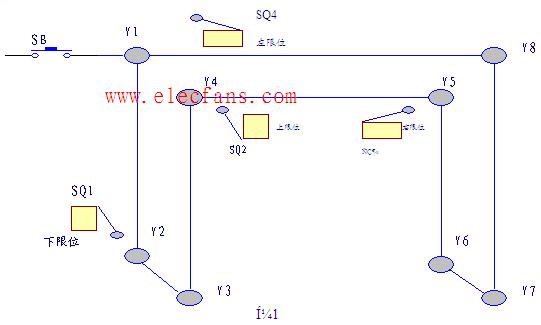
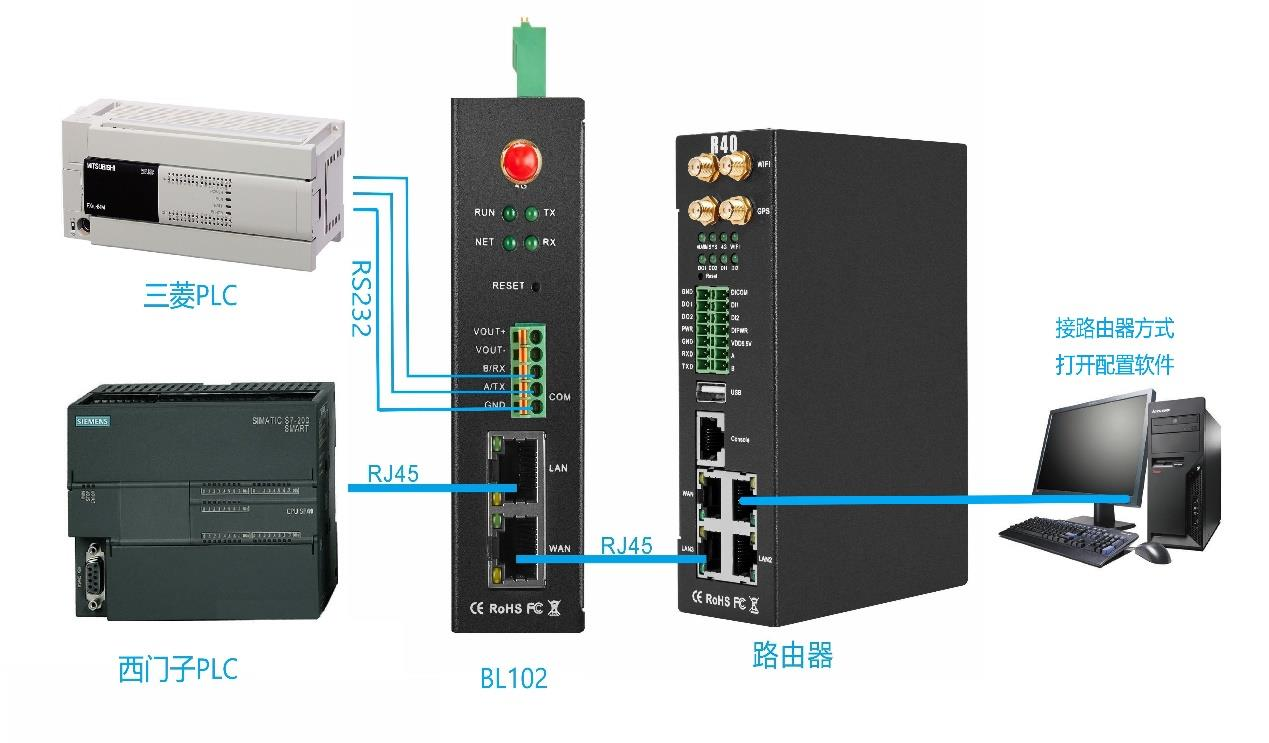
某工件搬運機械手工作示意圖,如圖7-12所示。該機械手的任務是將工件從A傳送帶搬運到B傳送帶上來(A、B傳送帶不用PLC控制)。機械手的初始狀態為原點位置,此時機械手在最上面和最右面,且夾緊裝置處于放松狀態。
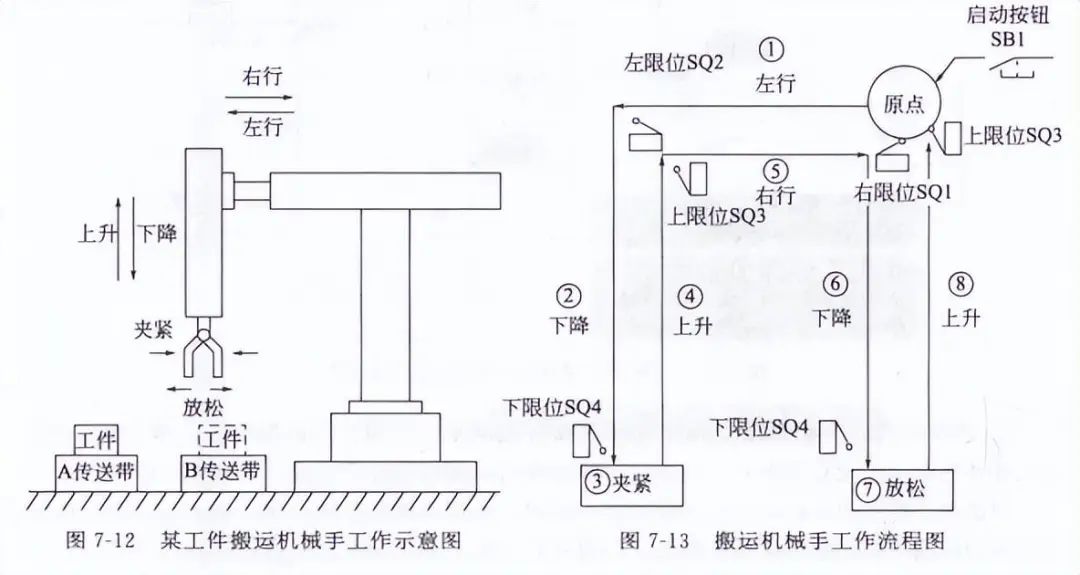
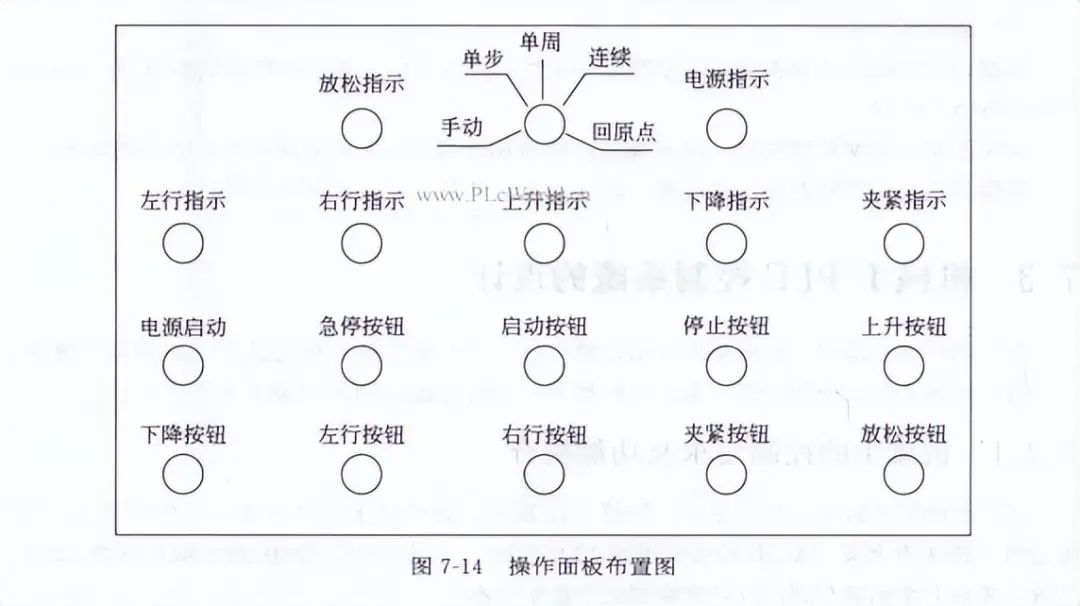
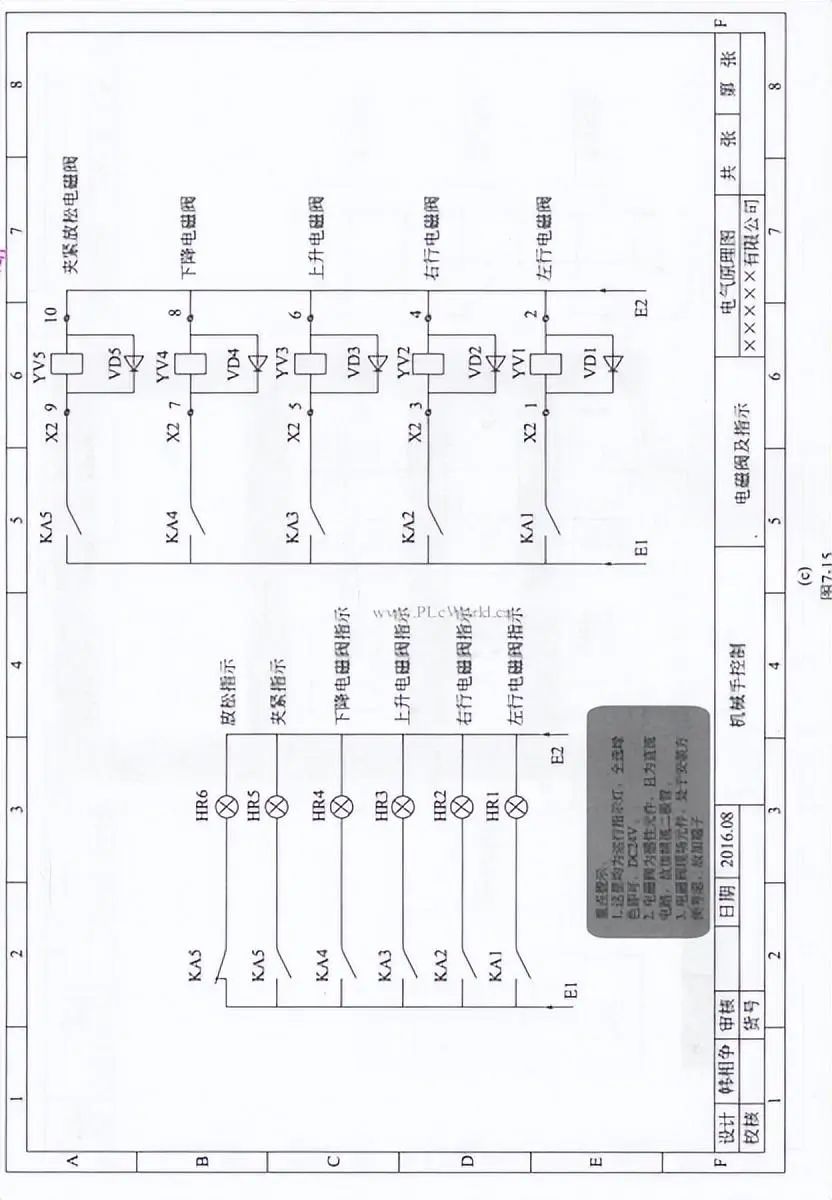
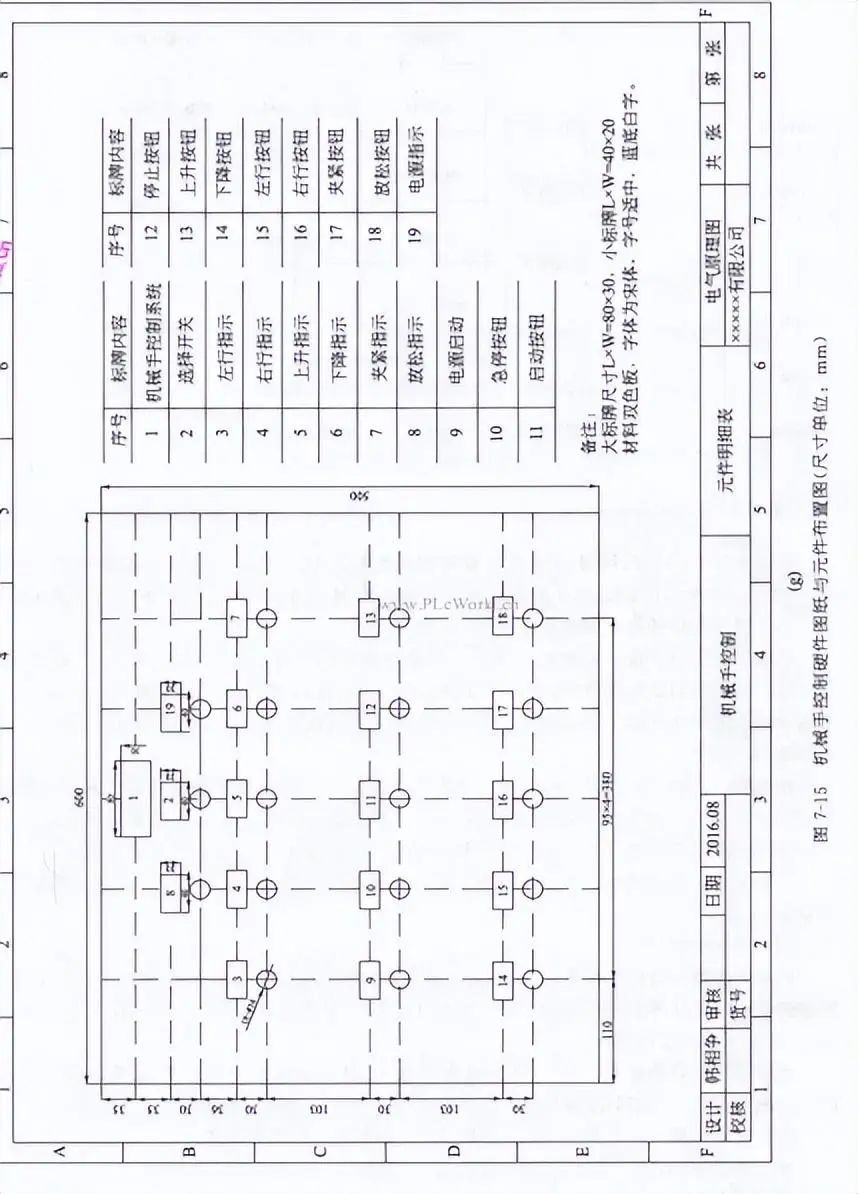
搬運機械手工作流程圖,如圖7-13所示。按下啟動按鈕后,從原點位置開始,機械手將執行“左行→下降→夾緊→上升→右行→下降→放松→上升”的工作流程一個周期。這些動作均由電磁閥來控制,特別的,夾緊和放松動作僅由一個電磁閥來控制,該電磁閥狀態為1表示夾緊,否則為放松狀態。左行、右行、上升、下降這些動作由限位開關來切換,夾緊、放松動作由定時器來切換,且定時時間為ls。為了滿足實際生產的需求,將機械手設有手動和自動2種工作模式,其中自動工作模式又包括單步、單周、連續和自動回原點4種方式。操作面板布置,如圖7-14所示。
(1)手動工作方式
利用按鈕對機械手每個動作進行單獨控制。在該工作方式中,設有6個手動按鈕,分別控制左行、右行、上升、下降、夾緊和放松。
(2)單步工作方式
從原點位置開始,每按一下啟動按鈕,系統跳轉一步,完成該步任務后自動停止在該步,再按一下啟動按鈕,才開始執行下一步動作。單步工作方式常常用于系統的調試和維修。
(3)單周工作方式
按下啟動按鈕,機械手從原點開始,按圖7-13工作流程完成一個周期后,返回原點并停留在原點位置。
(4)連續工作方式
機械手在原點位置時,按下啟動按鈕,機械手從原點位置開始,將按圖7-13工作流程周期性循環動作。按下停止按鈕,機械手并不馬上停止工作,待完成最后一個周期工作后,系統才返回并停留在原點位置。
(5)自動回原點工作方式
機械手有時可能會停止在非原點位置,這時機械手無法進行自動工作方式,所以需對機
械手的位置進行調整,當按下啟動按鈕時,機械手會按其回原點程序由其他位置回到原點位置。
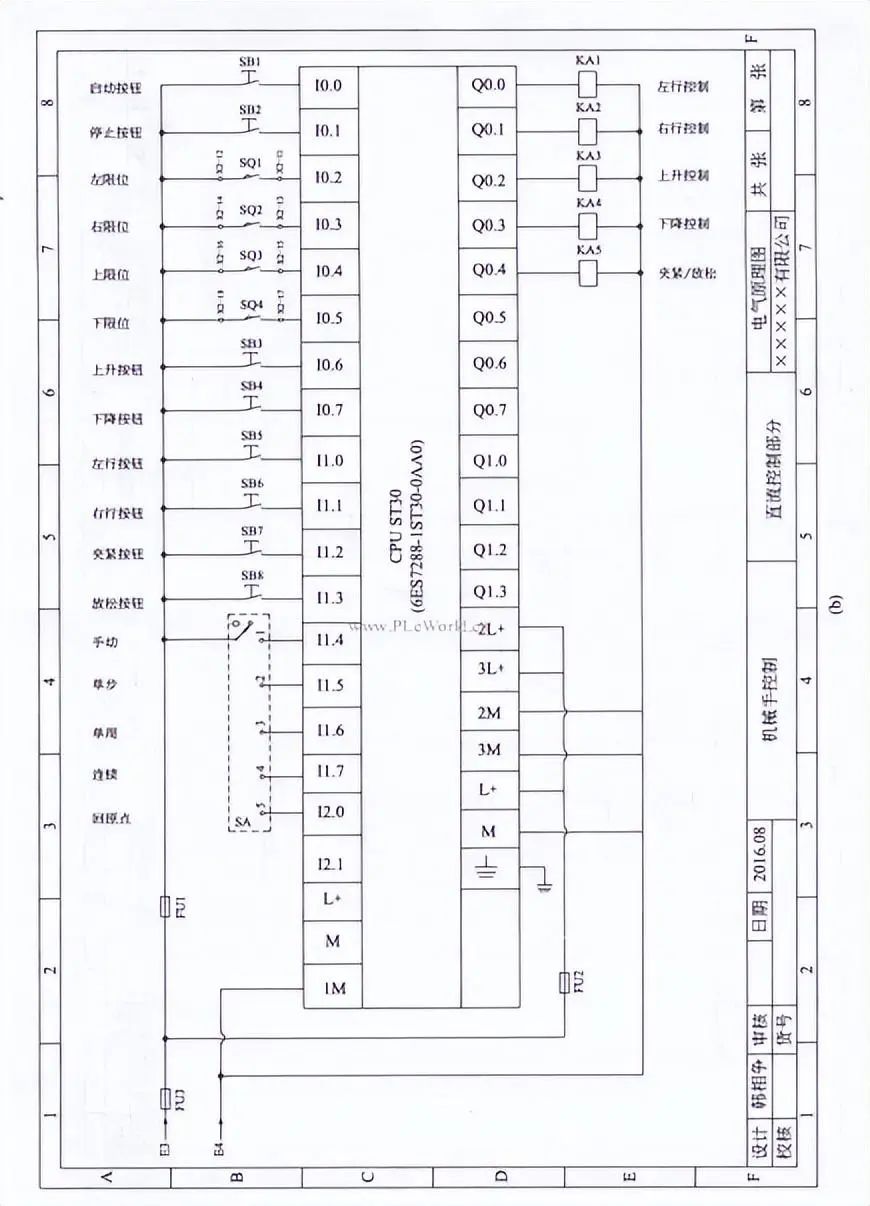
PART?03 PLC及相關元件選型
機械手自動控制系統采用西門子S7-200SMART PLC,CPUST30模塊,DC供電,DC
輸入,晶體管輸出型。
PLC控制系統的輸入信號有17個,均為開關量。其中操作按鈕開關有8個,限位開關有4個,選擇開關有1個(占5個輸入點);PLC控制系統輸出信號有5個,各個動作由直流24V電磁閥控制;本控制系統采用S7-200SMART PLC完全可以,且有一定裕量。
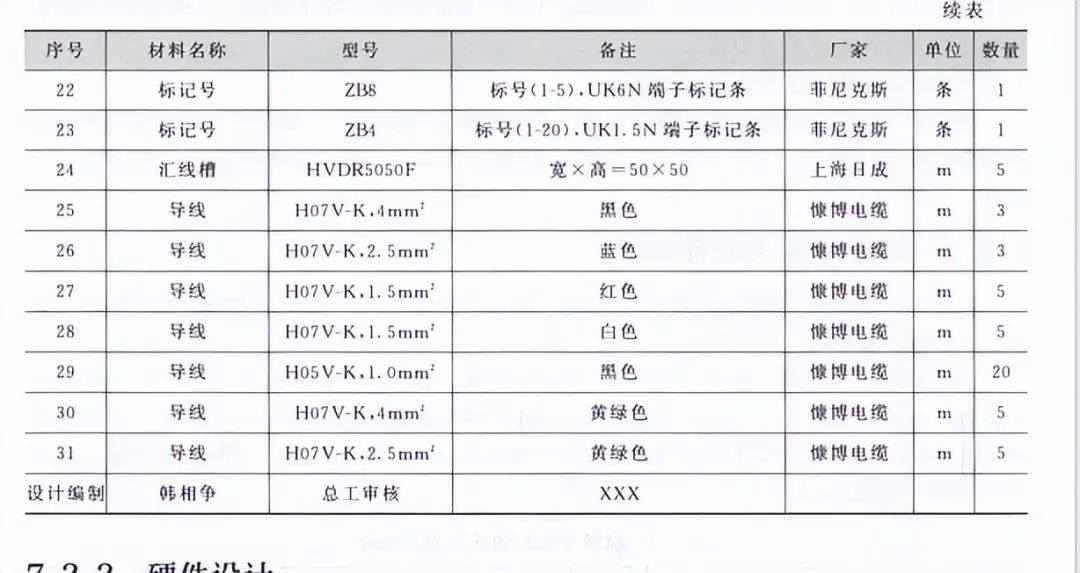
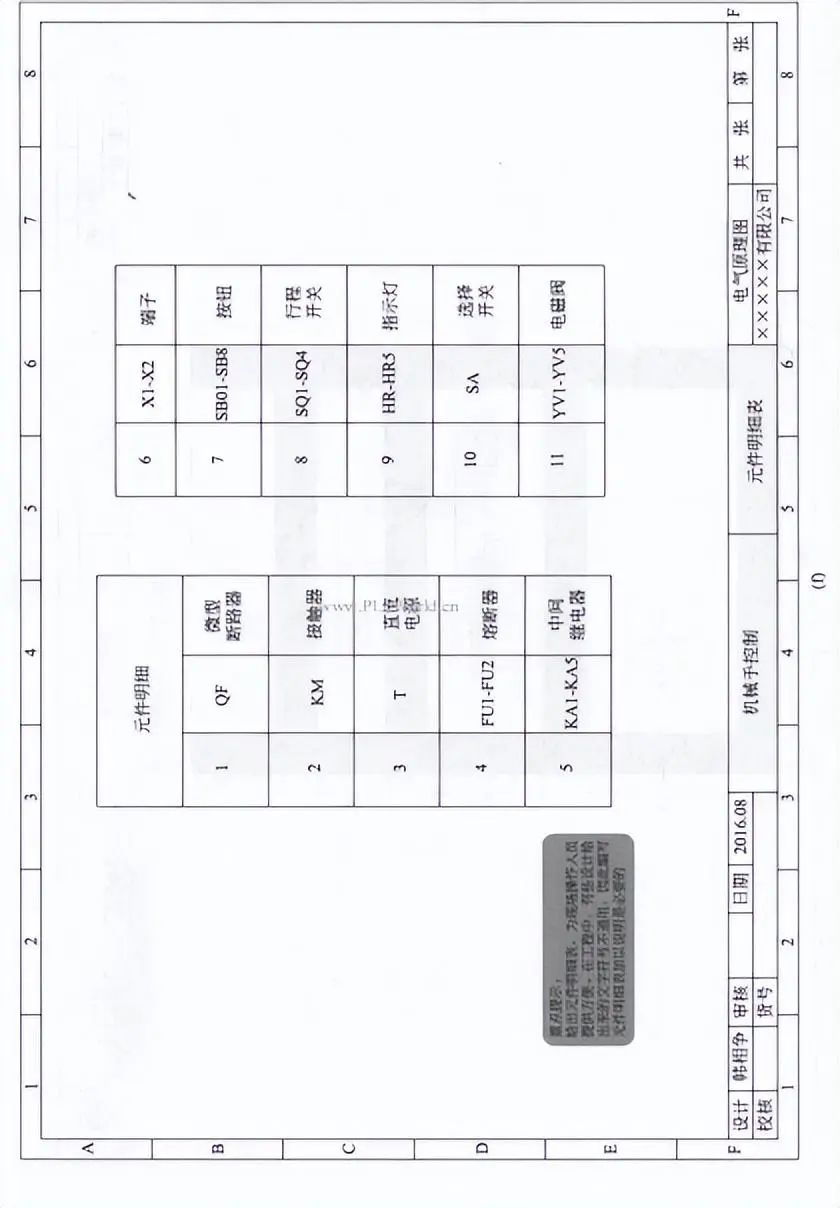
元件材料清單
如表7-4所示

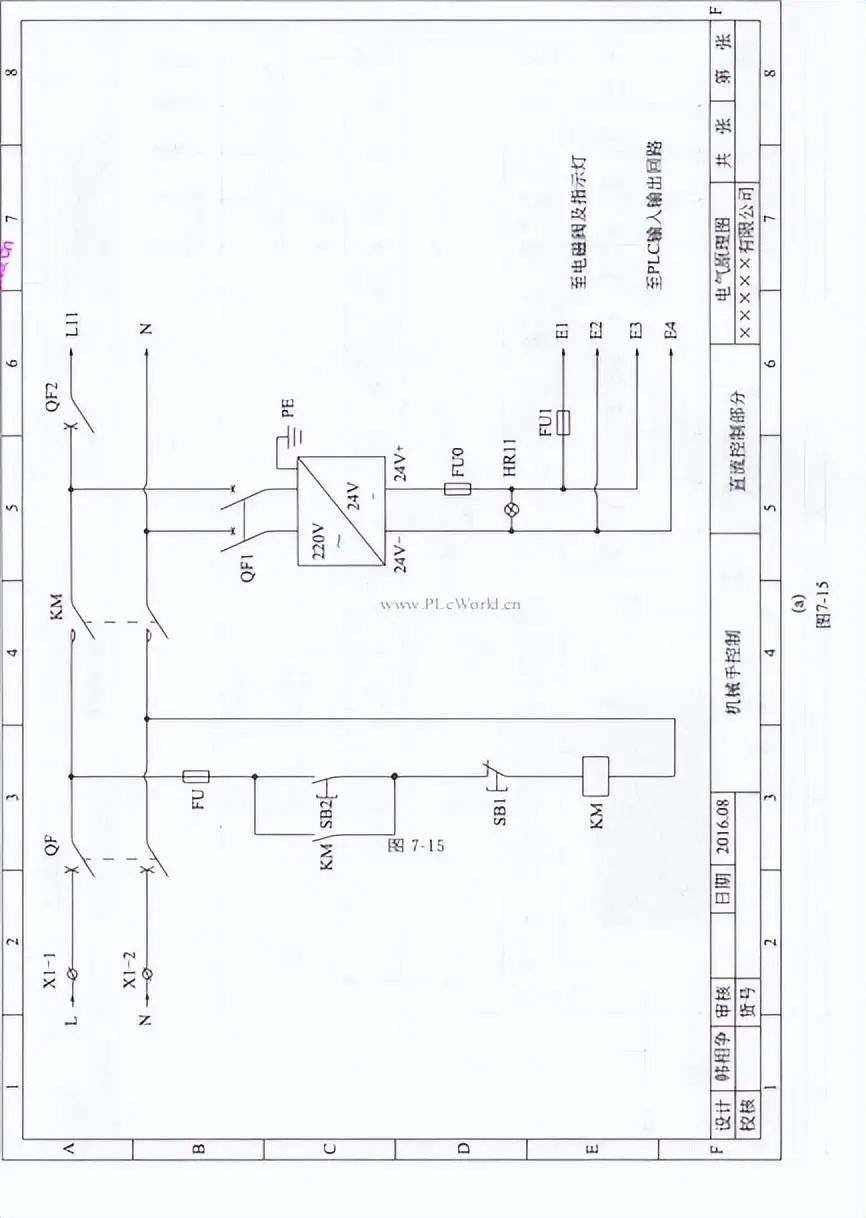
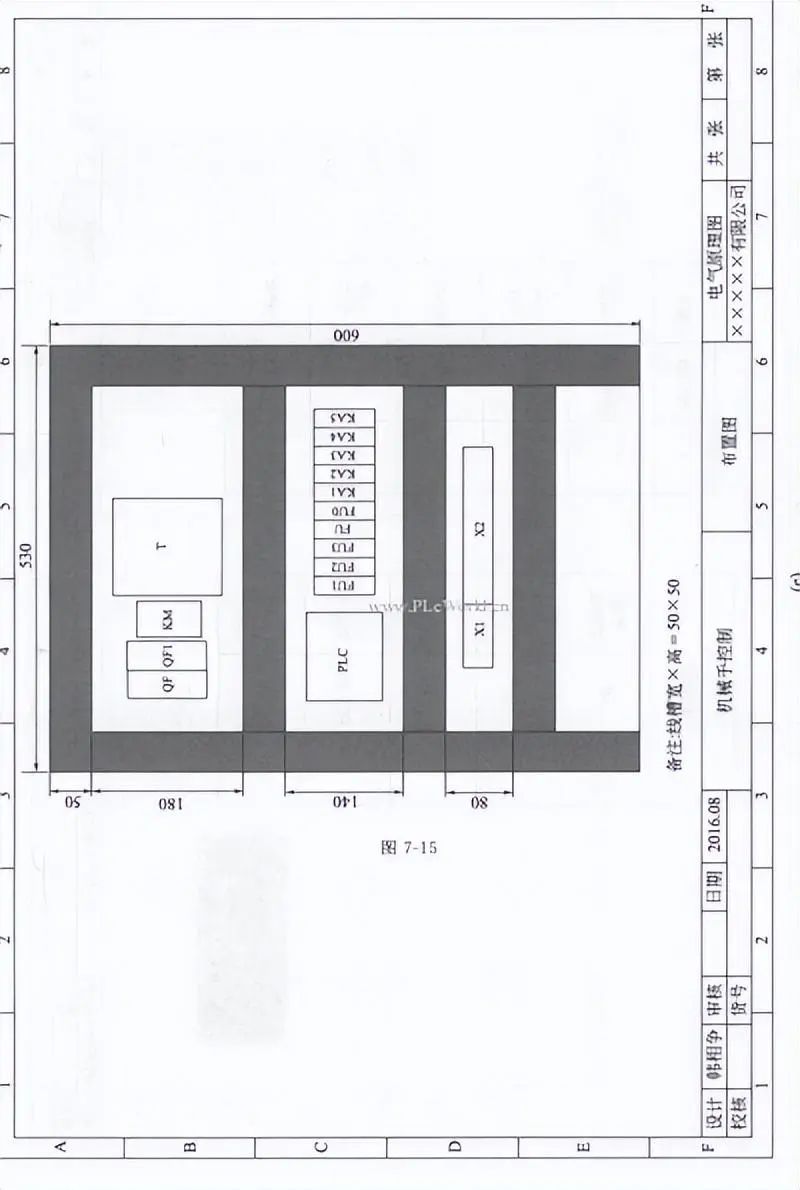
PART?04 硬件設計
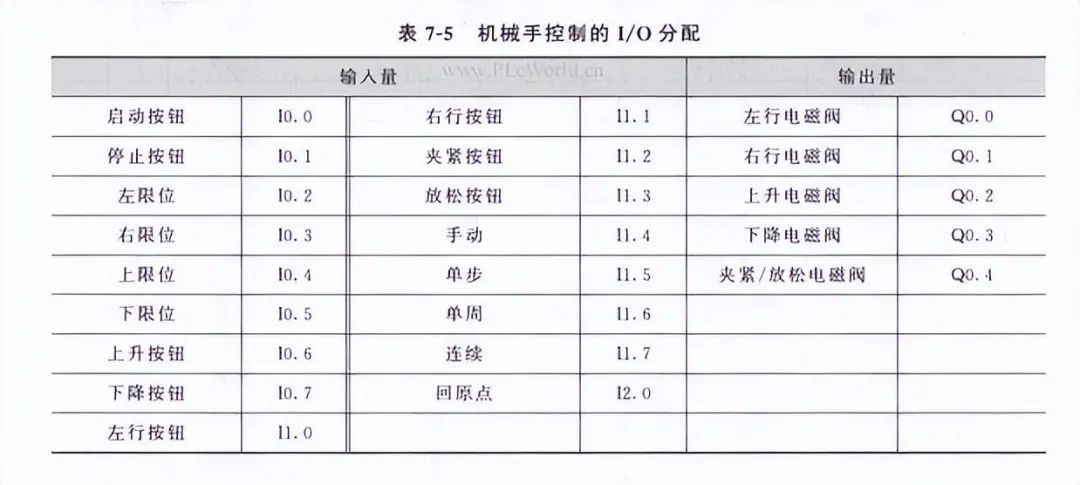
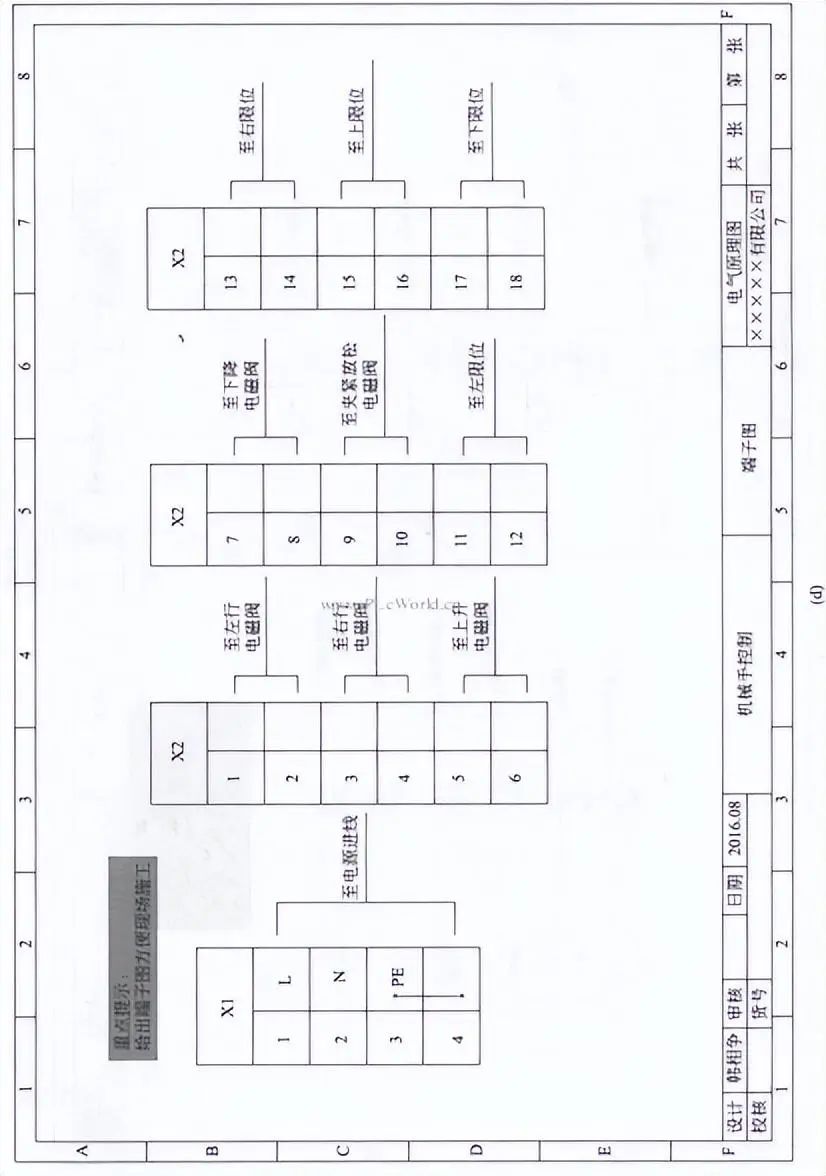
機械手控制的I/O分配,如表7-5所示。硬件設計的主回路、控制回路、PLC輸入輸出
回路、操作臺開孔圖紙,如圖7-15所示。操作臺殼體可參考組合機床系統殼體圖,這里省略。
a
b
c
d
e
f
重點提示:給出元件明細表。為現場操作人員提供方便。在工程中,有些設計給出來的文字符號不通用,因此編寫元件明姻表加以說明是必要的。
g
給出元件明細表。為現場操作人員提供方便。在工程中,有些設計給出來的文字符號不通用,因此編寫元件明姻表加以說明是必要的
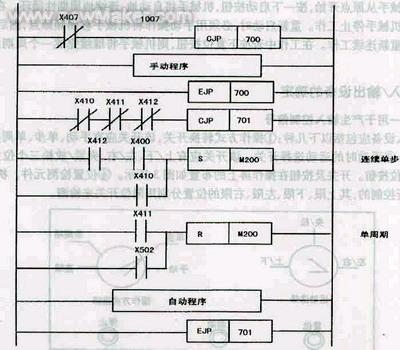
PART?05 程序設計
機械手控制主程序如圖7-16所示,當對應條件滿足時,系統將執行相應的子程序。子程序主要包括公共程序、手動程序、自動程序和回原點程序4大部分。
?
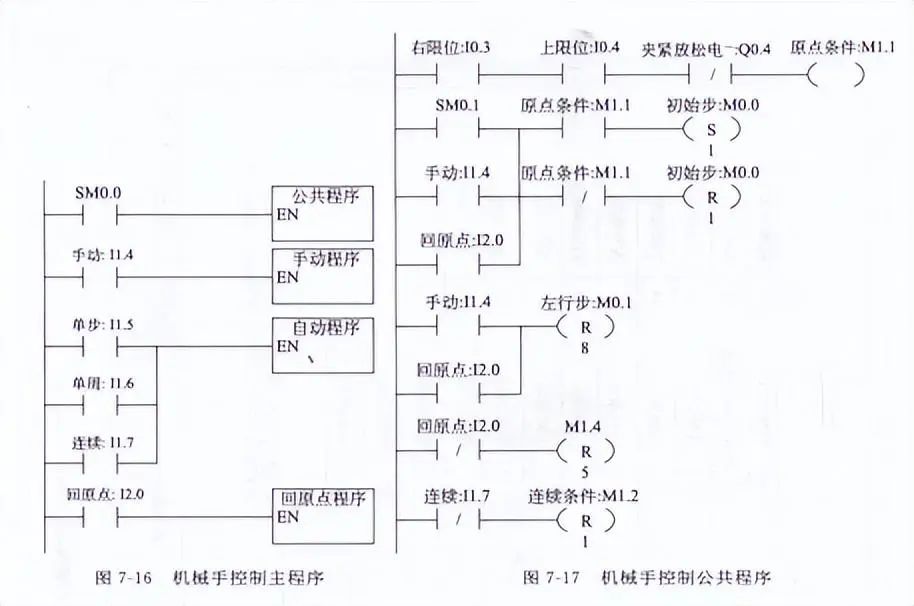
(1)公共程序
機械手控制公共程序如圖7-17所示。公共程序用于處理各種工作方式都需要執行的任務,以及不同工作方式之間互相切換的處理。公共程序的編寫通常要考慮原點條件、初始狀態、復位非初始步、復位回原點步和復位連續標志位5個部分。機械手處于最上面和最右面且夾緊裝置放松時為原點狀態,因此原點條件由上限位10.4的常開觸點、右限位I0.3的常開觸點和表示機械手放松Q0.4常閉觸點的串聯電路組成,當串聯電路接通時,輔助繼電器M1.1變為ON。機械手在原點位置,系統處于手動、回原點或初始化狀態時,初始步M0.0都會被置位,此時為執行自動程序做好準備;若此時M1.1為OFF,則M0.0會被復位,初始步變為不活動步,即使此時按下啟動按鈕,自動程序也不會轉換到下一步,因此禁止了自動工作方式的運行。
當手動、自動、回原點3種工作方式相互切換時,自動程序可能會有兩步被同時激活,為了防止誤動作,因此在手動或回原點狀態下,輔助繼電器M0.1~M1.0要被復位。在非回原點工作方式下,12.0常閉觸點閉合,輔助繼電器M1.4~M2.0被復位。在非連續工作方式下,11.7常閉觸點閉合,輔助繼電器M1.2被復位,系統不能執行連續程序。
(2)手動程序
機械手控制手動程序如圖7-18所示。當按下左行啟動按鈕(I1.0常開觸點閉合),且上
限位被壓合(I0.4常開觸點閉合)時,機械手左行;當碰到左限位時,常閉觸點I0.2斷開,
Q0.0線圈失電,左行停止。
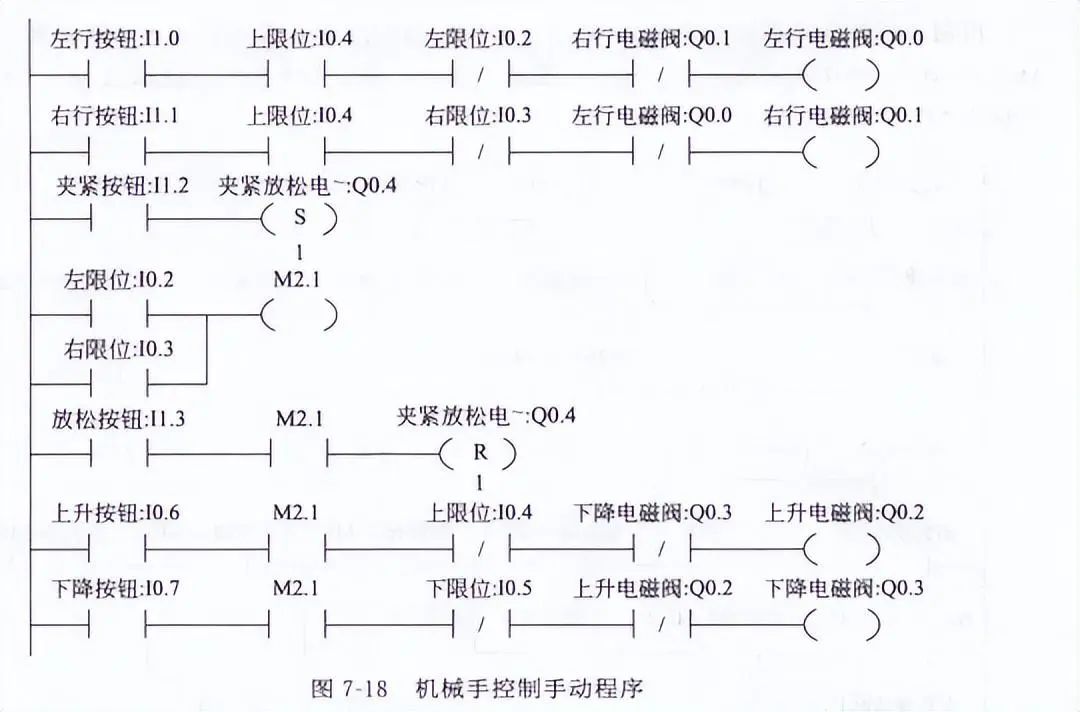
當按下右行啟動按鈕(11.1常開觸點閉合),且上限位被壓合(I0.4常開觸點閉合)
時,機械手右行;當碰到右限位時,常閉觸點I0.3斷開,Q0.1線圈失電,右行停止。
按下夾緊按鈕,I1.2變為ON,線圈Q0.4被置位,機械手夾緊。
按下放松按鈕,I1.3變為ON,線圈Q0.4被復位,機械手將工件放松。
當按下上升啟動按鈕(I0.6常開觸點閉合),且左限位或右限位被壓合(I0.2或I0.3常開觸點閉合)時,機械手上升;當碰到上限位時,常閉觸點I0.4斷開,Q0.2線圈失電,上升停止。當按下下降啟動按鈕(I0.7常開觸點閉合),且左限位或右限位被壓合(I0.2或10.3常開觸點閉合)時,機械手下降;當碰到下限位時,常閉觸點I0.5斷開,Q0.3線圈失電,下降停止。
在手動程序編寫時,需要注意以下幾個方面。
①為了防止方向相反的兩個動作同時被執行,手動程序設置了必要的互鎖。
②為了防止機械手在最低位置與其他物體碰撞,在左右行電路中串聯上限位常開觸點加以限制。只有在最左端或最右端機械手才允許上升、下降和放松,因此設置了中間環節加以限制。
(3)自動程序
機械手控制自動程序順序功能圖如圖7-19所示,根據工作流程的要求,顯然1個工作周期有“左行→下降→夾緊→上升→右行→下降→放松→上升”這8步,再加上初始步,因此共9步(從M0.0~M1.0);在M1.0后應設置分支,考慮到單周和連續的工作方式,以一條分支轉換到初始步,另一分支轉換到M0.1步。需要說明的是,在畫分支的有向連線時一定要畫在原轉換之下,即要標在M1.1(SM0.1+I1.4+I2.0)的轉換和I0.0·M1.1的轉換之下,這是繪制順序功能圖時要注意的。
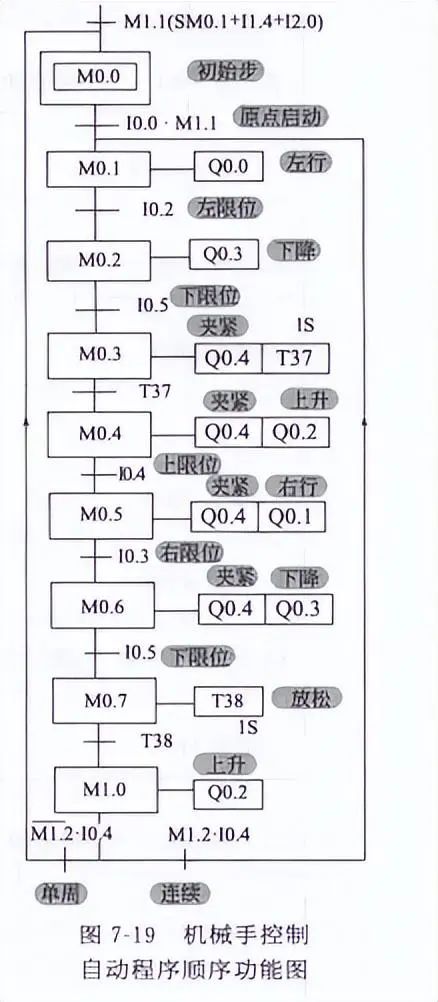
自動程序時,采用啟保停電路編程法,其中M0.0~M1.0為中間編程元件,連續、單周、單步3種工作方式用連續標志M1.2和轉換允許標志M1.3加以區別。
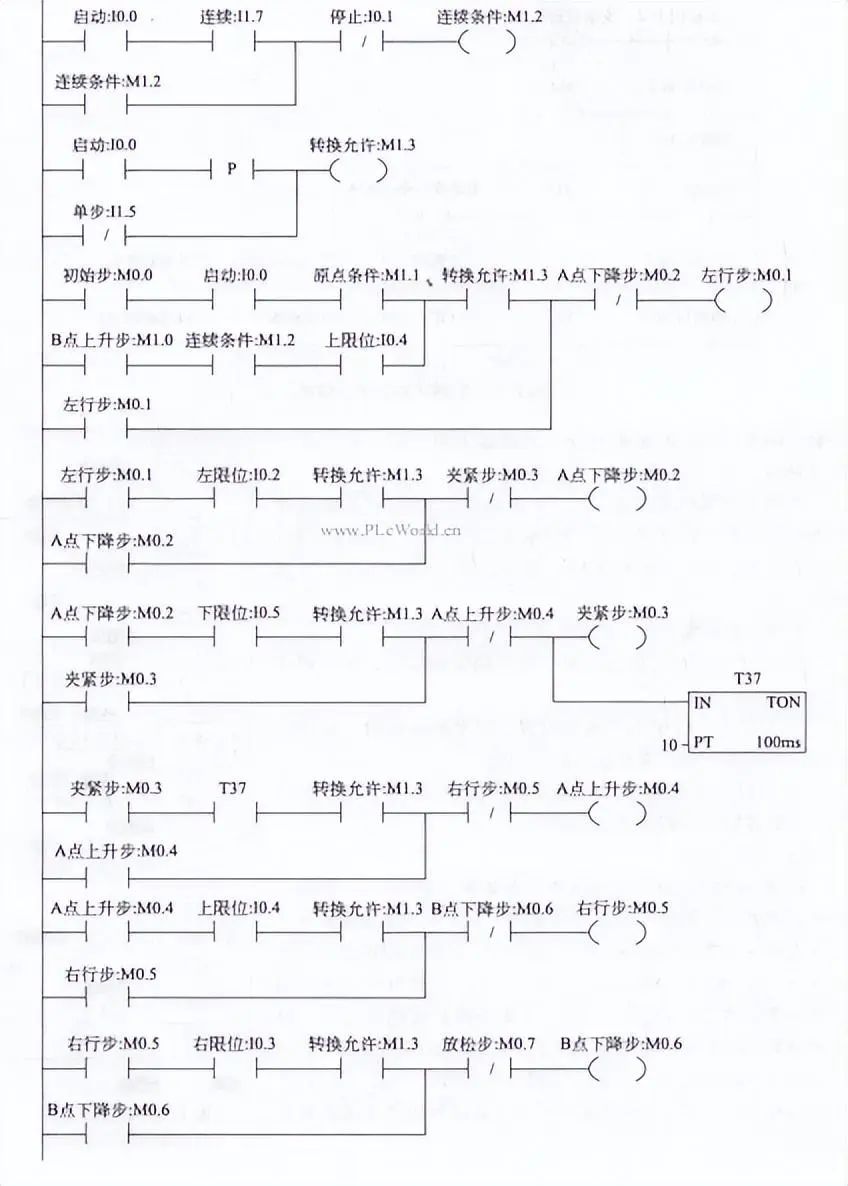
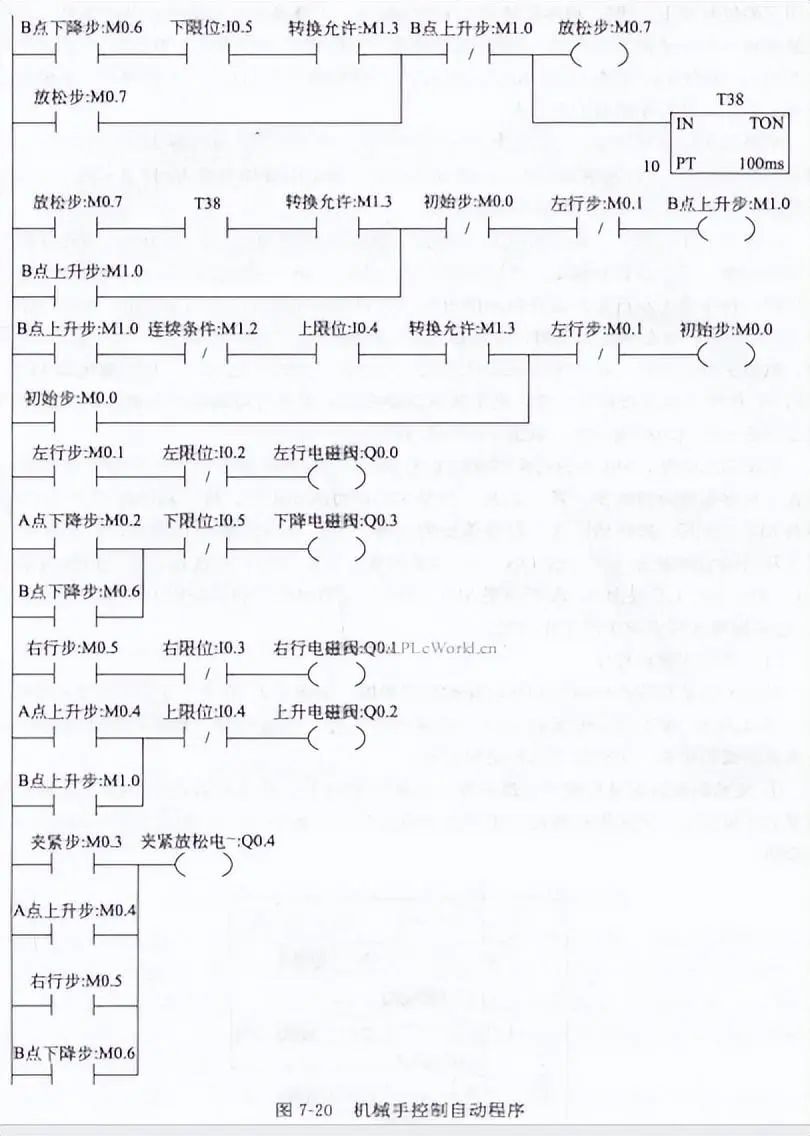
在連續工作方式下,常開觸點I1.7閉合,此時處于非單步狀態,常閉觸點I1.5為ON,線圈M1.3接通,允許轉換;若原點條件滿足,在初始步為活動步時,按下啟動按鈕I0.0,線圈M0.1得電并自鎖,程序進入左行步,線圈Q0.0接通,機械手左行;當碰到左限位開關I0.2時,程序轉換下降步M0.2,左行步M0.1停止,線圈Q0.3接通,機械手下降;當碰到下限位開關I0.5時,程序轉換到夾緊步M0.3,下降步M0.2停止;以此類推,以后系統就這樣一步一步地工作下去。需要指出的是,當機械手在步M1.0返回時,上限位I0.4狀態為1,因為先前連續標志位M1.2狀態為1,故轉換條件M1.2·I0.4滿足,系統將返回到M0.1步,反復連續地工作下去。
單周與連續原理相似,不同之處在于在單周的工作方式下,連續標志條件不滿足(即線圈M1.2不得電),當程序執行到上升步M1.0時,滿足的轉換條件為M1.2·I0.4,因此系統將返回到初始步M0.0,機械手停止運動。在單步工作方式下,常閉觸點I1.5斷開,輔助繼電器M1.3變為OFF,不允許步與步之間的轉換。當原點條件滿足,在初始步為活動步時,按下啟動按鈕I0.0,線圈M0.1得電并自鎖,程序進入左行步;松開啟動按鈕I0.0,輔助繼電器M1.3馬上失電。在左行步,線圈Q0.0得電,當左限位壓合時,與線圈Q0.0串聯的I0.2的常閉觸點斷開,線圈Q0.0失電,機械手停止左行。I0.2常開觸點閉合后,如不按下啟動按鈕I0.0,輔助繼電器M1.3狀態為0,程序不會跳轉到下一步,直至按下啟動按鈕,程序方可跳轉到下降步;此后在某步完成后必須按啟動按鈕一次,系統才能轉換到下一步。
需要指出的是,M0.0的啟保停電路放在M0.1啟保停電路之后的目的是,防止在單步方式下程序連續跳轉兩步。若不如此,當步M1.0為活動步時,按下啟動按鈕I0.0,M0.0步與M0.1步同時被激活,這不符合單步的工作方式;此外轉換允許步中,啟動按鈕I0.0用上升沿的目的是使M1.3僅ON一個掃描周期,它使M0.0接通后,下一掃描周期處理M0.1時,M1.3已經為0,故不會使M0.1為1,只有當按下啟動按鈕I0.0時,M0.1才為1,這樣處理才符合單步的工作方式。
(4)自動回原點程序
機械手自動回原點程序及順序功能圖和梯形圖,如圖7-21所示。在回原點工作方式下,I2.0狀態為1。按下啟動按鈕I0.0時,機械手可能處于任意位置,根據機械手所處的位置及夾緊裝置的狀態,可分以下幾種情況討論。
1.夾緊裝置放松且機械手在最右端:夾緊裝置處于放松且在最右端,所以直接上升返回原點位置即可。對應的程序為,按下啟動按鈕I0.0,條件I0.0.Q0.4·10.3滿足,M2.0步接通。
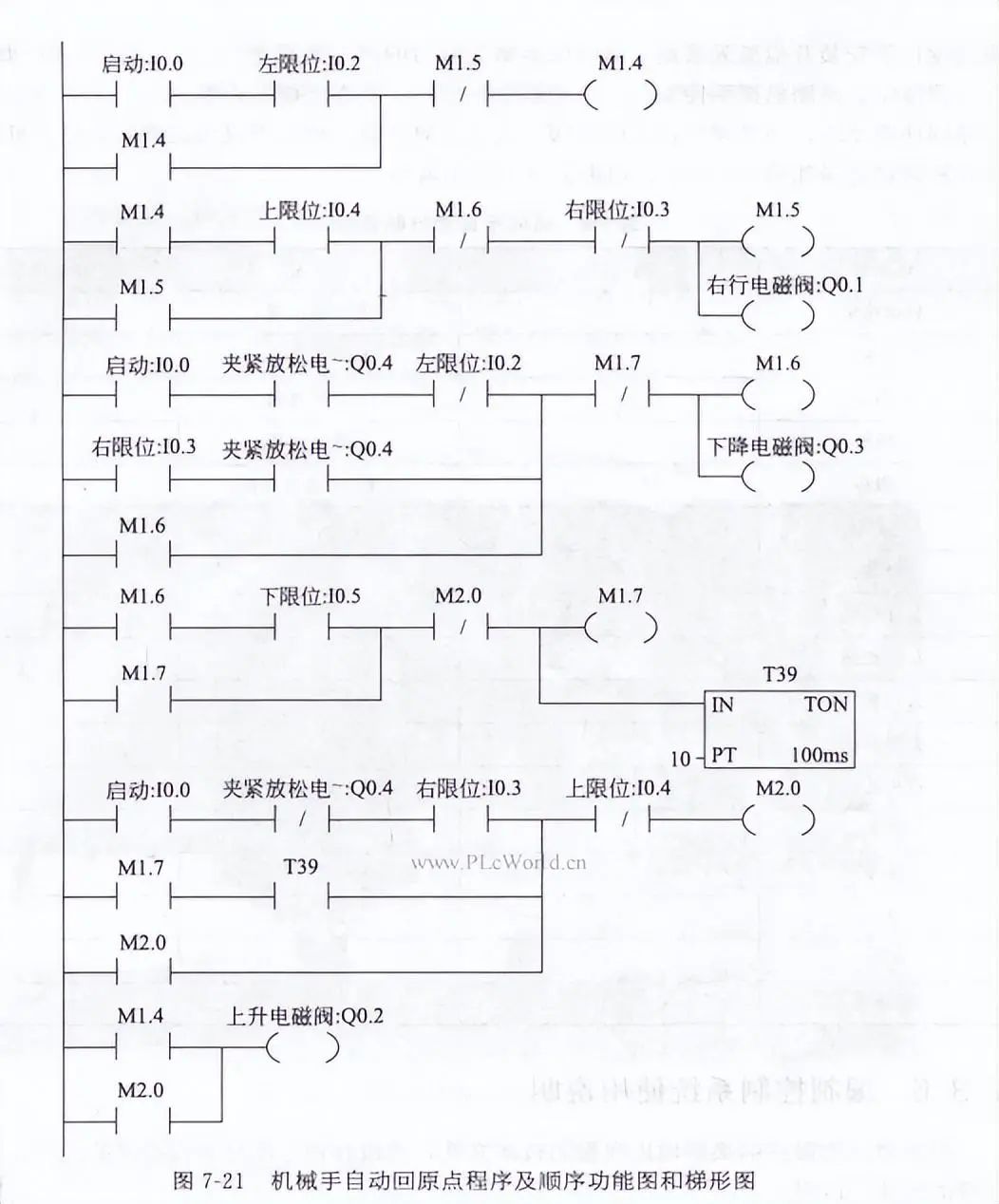
2.機械手在最左端:機械手在最左端夾緊裝置可能處于放松狀態,也可能處于夾緊狀態。若處于夾緊狀態時,按下啟動按鈕I0.0,條件I0.0.10.2滿足,因此依次執行M1.4~M2.0步程序,直至返回原點;若處于放松狀態,按下啟動按鈕I0.0,只執行M1.4~M1.5步程序,下降步M1.6以后不會執行,原因在于下降步M1.6的激活條件10.3.Q0.4不滿足,并且當機械手碰到右限位I0.3時,M1.5步停止。
3.夾緊裝置夾緊且不在最左端:按下啟動按鈕I0.0,條件I0.0.Q0.4·I0.2滿足,因此依次執行M1.6~M2.0步程序,直至回到原點。
審核編輯:黃飛
?














 工商網監
工商網監
評論