使用伺服電機在機器人技術中很常見,以實現精確控制。在這里,在本教程中,我們將向您展示如何通過藍牙連接將伺服電機與Arduino UNO和Android設備無線使用。我們已經使用 Arduino 控制了伺服,這次我們使用 Arduino 和藍牙控制伺服電機。
2022-11-16 16:19:57 2601
2601 
1200PLC控制伺服電機沒有原點傳感器可以回零嗎?
2023-03-30 16:40:53
1500走EPOS模式控制V90增量式編碼器電機,限位和原點能直接接伺服驅動上嗎?為什么回原點是碰到限位是伺服回報警,可以設置成碰到限位反轉的回原點方式嗎
2024-01-09 12:31:28
伺服電機原點位置在運行一段時間后為什么會發生偏移?這是什么原因呢?如何去解決呢?
2021-06-28 07:25:14
伺服電機原點位置在運行一段時間后發生偏移怎么解決?
2021-09-28 09:21:28
最近發現友友們有時候會遇到開機前伺服電機不能回原點或者回原點過程需要相當長的時間而且原點位置不對的問題。造成以上原因主要有以下幾點:1.編碼器有問題,更換編碼器。2.有點位近接開關的靈敏度有問題。3.在伺服器里面把參數清0。
2021-10-14 17:06:40
伺服電機是什么?伺服電機分為哪幾大類?伺服電機的主要特點有哪些?
2021-07-15 06:58:16
伺服電機的電子齒輪比到底是什么?伺服電機電子齒輪比怎么設置?
2021-09-28 06:07:20
想請問一個問題,請各位大佬指導一下。1、我把一個5N的砝碼掛在一根絲的一端,隨著時間的增加,絲會被拉長,我們可以時刻測量出拉長的變化量。2、那如果我用伺服電機+滾珠絲杠,想給這根絲一個5N的恒力,是不是用伺服電機的力矩控制模式就可以實現,和第一種可以實現同樣的效果。
2022-06-28 11:06:12
伺服驅動器與伺服電機怎么連接?如何實現伺服驅動器的基本控制?
2021-09-28 08:29:01
脈沖與限位器原點開關之間的關系。圖 1 回零過程圖原點回零模式用于尋找機械原點, 并定位機械原點與機械零點的位置關系。原點回零成后, 電機停止位置為機械原點(HomePosition), 通過設置 607...
2021-09-03 07:55:24
原點設置在setup----change drawing Origin如圖10-1原點設置界面所示,然后鼠標左鍵在PCB上點擊放置在你需要設置的地方。圖10-1原點設置
2018-11-20 17:44:05
及坐標軸方向。可以在 “偏好設置 -> PCB 編輯器 -> 原點和軸” 頁面進行設置。顯示原點有三種選擇:
頁面原點(默認)
鉆孔/放置文件原點
網格原點
雖然邏輯上可以
2023-06-14 14:00:49
PLC控制伺服電機找原點的方法是什么?
2021-09-29 07:16:34
西門子V90伺服用FB284塊的EPOS模式,回零完成后,一跑絕對定位就會丟失原點(Axisref變成False),沒有報警代碼。跑點動則不會丟失原點。請問這種情況應該怎么解決?
2023-06-12 16:49:37
本人新手,正學lv運動卡控制,這方面資料很少,特別是原點搜索的具體過程,找不到資料。OMRON PLC原點搜索是先搜索到原點接近感應開關后,再檢測到Z相脈沖或原點感應開關,此點即為伺服原點。但不
2017-06-08 21:40:35
答:做封裝時設置原點,主要是為了方便設計和生產。它的主要作用有以下幾點。(1)制作封裝時,一般都需要取一個參考位置放置焊盤,此時原點可以當作參考位置。(2)在PCB設計時,可以將原點當做一個參考位置
2021-07-03 16:18:09
三菱伺服電機轉矩模式怎么設置?
2021-09-30 08:08:19
高壓伺服電機有哪些優點及缺點?低壓伺服電機和高壓伺服電機有哪些不同之處?
2021-09-30 07:10:06
在一條絲桿的中間安裝一個原點感應器,只有這一個,這樣用PLC找原點比較合適,因為工作時是會原點上下都去的,用普通原點復歸在異常斷電時,如果在原點另一邊則會找不到原點可以自己寫一個會原點程序,向前走
2021-06-28 07:22:52
脈沖與限位器原點開關之間的關系。圖 1 回零過程圖原點回零模式用于尋找機械原點, 并定位機械原點與機械零點的位置關系。原點回零成后, 電機停止位置為機械原點(HomePosition), 通過設置 607Ch, 可以設定機械原點與機械零點(ZeroPosi.
2021-06-28 10:04:46
基于DS402協議的伺服電機原點回零模式怎么實現?
2021-09-30 06:29:57
如何實現伺服電機轉動固定角度呢?然后又停下來?
2021-09-24 06:37:51
伺服電機驅動器的作用是什么?如何實現高精度且高定位來控制伺服電機?
2021-10-12 13:01:01
如何使用Arduino和ESP8266實現網頁控制伺服電機?
2021-09-28 06:16:32
verilog是如何實現伺服電機控制的?
2021-09-24 12:29:32
伺服電機的基本概念是什么?如何去實現伺服電機的串口通訊?
2021-09-26 09:06:19
此狀態。在伺服電機上:設置控制方式;設置使能由外部控制;編碼器信號輸出的齒輪比;設置控制信號與電機轉速的比例關系。一般來說,建議使伺服工作中的最大設計轉速對應9V的控制電壓。比如,山洋是設置1V電壓對應
2015-12-29 11:12:23
如何通過linuxcnc和ighethercat來實現對伺服電機的控制?
2021-10-09 07:56:49
AD PCB布線怎樣設置原點
2019-09-23 05:37:47
關于伺服回原.我使用三菱PLC控制一個臺達伺服系統與一個步進系統, 通過臺達HMI界面做一些操作.為了方便使用, 想在出現異常時, 可以快速排除后一鍵回原點, 而不需要手動移動電機到原點的一側.這個
2021-06-28 12:17:10
控制伺服電機的FB塊怎么實現伺服的上電?
2021-09-28 06:08:52
步進伺服電機回原點的常用方法是什么?
2021-09-29 07:18:40
://wenku.baidu.com/view/7987d89a51e79b89680226f1.html2、步進電機如何回原點?----http://www.ymmfa.com/read-gktid-1556143.html3、步進電機怎么找原點 有沒有圖或程序呢----
2021-07-08 09:35:40
但是實找零的方法有很多種,步進伺服電機自身可以完成,上位機配合也可以完成,下面就來介紹下回原點的常見方法有以下幾種。一、步進伺服電機在工作的時候,處于一直轉動的狀態,但當它碰到原點開關的時候,伺服
2021-06-28 08:52:50
永磁同步伺服電機無編碼器運轉怎么實現的
2023-12-25 07:29:35
求大神分享伺服電機的幾種常用模式及控制模式的設置
2021-09-27 09:01:24
畫PCB原件庫時如何設置新原點啊{:1:}
2014-03-27 22:57:25
是否有損壞現象,注意每個伺服電機都有一個緩沖膠塊,要保證此緩沖部件完整,否則可能會損壞伺服電機定子。另外檢查是否有人修改齊頭鋸機構的線點,在保證伺服電機原點正確的情況下,可以逐步微調伺服電機回程和加
2016-01-08 14:45:25
我遇到一個問題就是拿到一個伺服電機看不到內部結構但是知道它引出來的幾條線所對應的接口(如圖),商家說要自己編寫程序來控制電機實現伺服功能。但是我對電機是啥都不懂 希望有大神給點指點謝謝!!!
2019-01-10 11:31:40
請問一體化伺服電機編碼器值清零或設置原點如何操作?
2021-09-26 07:11:13
請問臺達PLC如何實現伺服電機的正反轉?
2021-09-26 07:13:13
請問如何實現一鍵伺服回原點?
2021-10-13 06:30:34
請問如何使用三菱伺服電機實現定位功能?
2021-09-26 07:03:54
請問如何基于TwinCAT3實現伺服電機控制?
2021-09-26 09:09:47
由PLC與伺服電機組成一個系統,通過PLC控制伺服電機,實現機構的原點回歸、相對定位和絕對定位功能
2017-11-13 06:01:0032048 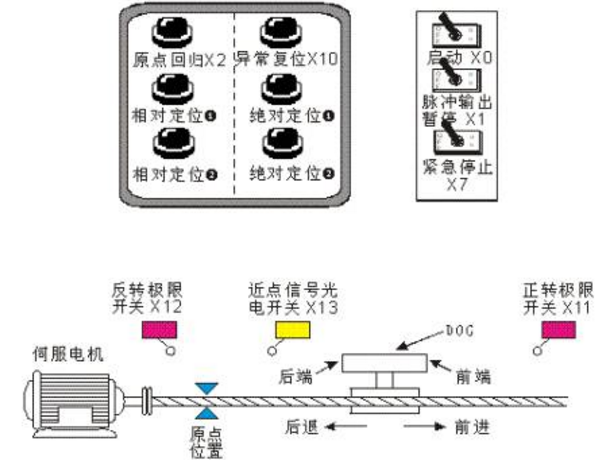
一般來說,伺服電機的編碼器有兩種,絕對值編碼器和相對值編碼器。絕對值編碼器斷電可以保持,只要電池還有電,是不需要尋原點的;相對編碼器由于斷電后會丟失電機多圈數值,故需要尋原點操作。
2018-02-05 09:09:3423452 伺服電機是在伺服系統中控制機械元件運轉的發動機,是一種補助馬達間接變速裝置。伺服電機是可以連續旋轉的電-機械轉換器。作為液壓閥控制器的伺服電機,屬于功率很小的微特電機。伺服電機分為直流伺服電機和交流伺服電機,以永磁式直流伺服電機和并激式直流伺服電機最為常用。
2018-04-02 15:47:2350713 因為,伺服電機本身具備發出脈沖的功能,所以伺服電機每旋轉一個角度,都會發出對應數量的脈沖,這樣,和伺服電機接受的脈沖形成了呼應,或者叫閉環,如此一來,系統就會知道發了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉動,從而實現精確的定位,可以達到0.001mm。
2018-04-12 15:06:2613696 本文針對伺服電機遠程控制接線復雜性、單一性、不穩定性等問題,提出采用開放式通信協議DS301、驅動子協議DSP402實現伺服電機控制的新方法。
2018-06-28 14:58:217532 
伺服電機是如何實現精準定位?如何理解它的閉環特性?今天我們就來說說。
2019-03-01 08:49:3115751 
伺服電機的位置由脈沖長度設置。伺服器預計大約每20毫秒接收一次脈沖。如果該脈沖在1毫秒內為高電平,則伺服角度將為零;如果為1.5毫秒,則它將達到其中心位置;如果為2毫秒,則將處于180度。
2019-11-27 15:45:2520197 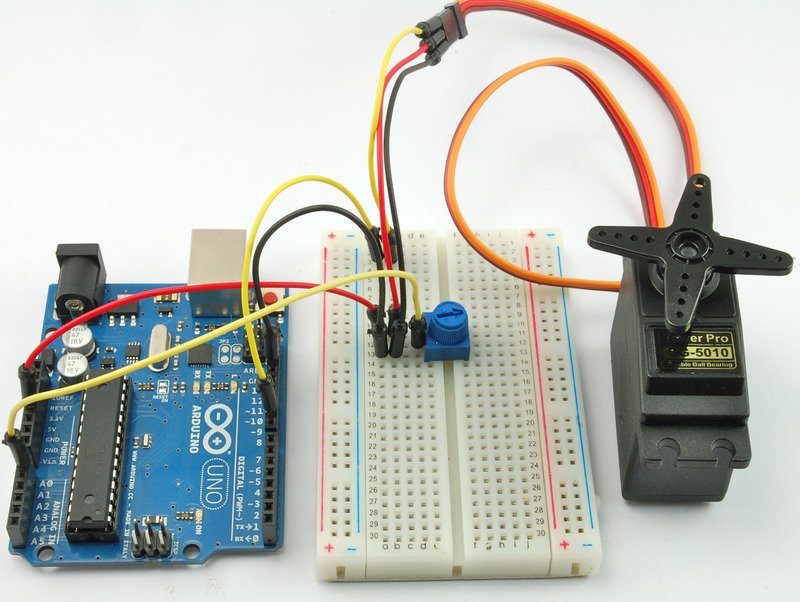
伺服電機的使用范圍很多,想要弄清楚伺服電機會在什么地方用?那就的從原理上來說一下電機的功能。
2020-08-25 14:58:009374 做封裝時設置的原點,主要為了方便設計和生產。它的主要作用有以下幾點:
2020-09-14 17:16:195925 因為,伺服電機本身具備發出脈沖的功能,所以伺服電機每旋轉一個角度,都會發出對應數量的脈沖,這樣,和伺服電機接受的脈沖形成了呼應,或者叫閉環,如此一來,系統就會知道發了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉動,從而實現精確的定位,可以達到0.001mm。
2020-11-26 10:31:185551 步進電機和伺服電機在工業傳動控制領域都是重要的控制部件,應用面廣泛。但是步進電機和伺服電機有什么不同呢?
2020-12-14 21:28:351082 在哪幾種情況下會造成伺服電機抖動?怎樣才能解決這些伺服電機抖動帶來的問題?分別是怎么解決的? 例如:加減速時間設置得過小,伺服電機在突然的啟動或者停止的時候會產生高慣性抖動......分別把加減
2020-12-22 11:54:3717401 
我們在是使用伺服電機的時候,一定要調節好電動機的各種參數才可以一切正常應用。可是針對一些初學者小伙伴們,很有可能壓根不清楚調節什么參數,取得伺服電機就一籌莫展,只有借助經銷商的技術性老師傅,如果
2021-06-18 15:59:425972 伺服電機剛買來時,為了適應工作對象,還有自己的熟練程度,是需要進行設置和調試都能繼續使用的,那么不懂這方面應該怎么設置呢?下面華科星小編來分享具體的流程。 伺服電機怎么設置? 1.復位主要參數
2021-07-11 15:20:4721595 伺服電機中的伺服簡單一點來說就是跟蹤的意思。
2021-08-26 16:10:4314863 什么是伺服驅動器?伺服驅動器是用來控制伺服電機的一種控制器,被廣泛應用于自動化設備中,那么伺服驅動器一般要設置哪些參數?
2022-01-17 10:41:0422173 伺服電機有兩種編碼器:增量式編碼器和絕對值式編碼器,絕對值式編碼器還有單圈絕對值和多圈絕對值之分。
2022-10-12 15:19:5918730 編碼器讓電機實現了閉環控制。 那有的朋友就會說了,同樣都是加了編碼器結構的伺服電機,步進類型的設備價格比永磁同步的低很多,我是不是以后就選步進的就行了呢?也不是,步進電機只有在低速條件下才會有比較大的轉矩,轉速
2022-11-05 10:15:385465 伺服電機是一個大的概念,任何一臺運動電機加裝了編碼器結構,能夠實現運動反饋修正的話,我們都可以稱其為伺服電機。
2022-11-07 12:27:033323 在伺服電機上:設置控制方式;設置使能由外部控制;編碼器信號輸出的齒輪比;設置控制信號與電機轉速的比例關系。一般來說,建議使伺服工作中的最大設計轉速對應9V的控制電壓。
2023-01-03 12:51:101788 原因:參數設置不太合理,負載系數小;運行時,無法克服平衡板的彈力,至使下壓不到位,伺服報警;
2023-02-09 10:26:241959 松下伺服電機代理—日弘忠信今天給大家講講松下伺服電機如何恢復出廠設置?伺服電機恢復出廠設置方法。
2023-02-22 11:30:475378 伺服電機的使能信號是控制伺服電機運動的重要信號之一,通過使能信號的控制,可以實現對伺服電機的啟動和停止。同時,通過對使能信號的設置和調試,還可以實現對伺服電機的運動速度、加速度等參數的控制,提高
2023-03-03 11:20:4011209 伺服電機的零點校準是確保電機運動控制的精度和穩定性的關鍵步驟,通常包括以下步驟:
確認機械結構是否處于零點位置:在進行零點校準之前,需要確認機械結構是否已經正確安裝,并處于正確的零點位置。如果機械結構沒有正確安裝或已經發生了偏移,那么進行零點校準可能會導致電機的控制精度降低。
2023-03-07 14:57:217464 伺服電機通常是一種帶有反饋控制系統的電機,可以根據控制器的指令實現精確位置、速度或扭矩控制。伺服電機通常適用于需要精密控制的應用,如自動化生產線、機器人等。
直線電機和伺服電機都是用于精確控制運動的電機,但它們的結構和工作原理有所不同,下面是它們之間的區別:
2023-03-07 15:01:356590 伺服電機的型號通常由一串字母和數字組成,不同廠家的型號表現形式有所不同。以下是一些常見的伺服電機型號表示方法:
型號中含有電機的參數:一些廠家的伺服電機型號中會包含電機的參數,如電壓、功率
2023-03-07 15:10:2110813 伺服電機和普通電機的扭矩大小取決于具體型號和參數設置,沒有一概而論的答案。一般情況下,伺服電機的扭矩比同型號的普通電機更大,因為伺服系統可以通過反饋控制來調整輸出扭矩。但是,在一些特殊
2023-03-09 10:56:3312048 直流伺服電機和交流伺服電機都是常見的精密控制電機,但它們之間有一些區別,如下所示:
原理不同:直流伺服電機是基于直流電源供電的,通過改變電極之間的磁場來控制電機的轉速和方向;而交流伺服電機是基于交流電源供電的,通過改變電樞中電流的方向和大小來控制電機的轉速和方向。
2023-03-10 13:46:256734 伺服電動機分為直流伺服電機和交流伺服電機。直流伺服電機比較便宜,交流伺服電機比較常用。
2023-04-04 15:05:451422 交流伺服電機的性能要好一些,因為交流伺服是正弦波控制,轉矩脈動小;而無刷直流伺服是梯形波控制。但無刷直流伺服實現控制比較簡單,便宜。
2023-04-26 10:27:00832 所謂定位,就是要讓伺服電機走到一個確定的位置。這個位置可以是增量式的,也可以是絕對式的。打個比方,我們現在在路上,我們要往前走 10 米,相當于我們的位置要往前增加十米,這個十米就是一個位置增量。
2023-05-05 10:13:301893 
對伺服驅動器來說,最高可以接收500KHz的脈沖(差動輸入)集電極輸入是200KHz。電機輸出的力矩由負載決定,負載越大電機輸出的力矩越大,當然不能超出電機的額定負載。急劇的加減速或者過載而造成
2023-05-17 10:07:4813123 零點位置是通過程序復位控制回零或者在回零過程中感應到原點限位的時候,把當前位置值清零,表示原點或零點,一切位置都是以原點為基礎,確定零點位置的時候,應先確定運動的正向和負向,以及電機的實際運動方向。
2023-07-24 16:10:356149 選擇防爆電機類型,是根據具體應用需求和系統要求而定。以下是防爆伺服電機和防爆步進電機的一些特點和比較,以幫助您做出選擇。防爆伺服電機優點:高精度和高動態響應:伺服電機具有閉環控制系統,可以實現更精
2023-07-31 22:29:06384 
在自動化設備中,經常用到伺服電機,特別是位置控制,大部分品牌的伺服電機都有位置控制功能,通過控制器發出脈沖來控制伺服電機運行,脈沖數對應轉的角度,脈沖頻率對應速度(與電子齒輪設定
2023-08-08 08:09:141500 什么是伺服電機?伺服是一種電磁裝置,利用負反饋機制將電信號轉換為受控運動。基本上,伺服系統的行為類似于執行器,提供對速度、加速度和線性或角度位置的精確控制。它由四件事組成:直流電機、位置傳感器、齒輪
2023-08-30 08:08:521679 變頻電機和伺服電機的區別? 變頻電機和伺服電機是現代工業領域中常用的兩種電動機類型。雖然它們都可以實現電動機的運轉,但在設計原理、控制方式以及應用范圍等方面存在許多區別。本文將從這些方面進行詳盡
2023-12-08 10:47:38754 本文以松下FP1系列PLC和A4系列伺服驅動為例,編制控制伺服電機定長正、反旋轉的PLC程序并設計外圍接線圖,此方案不采用松下的位置控制模塊FPG--PP11122122等,而是用晶體管輸出
2023-12-21 10:08:02631 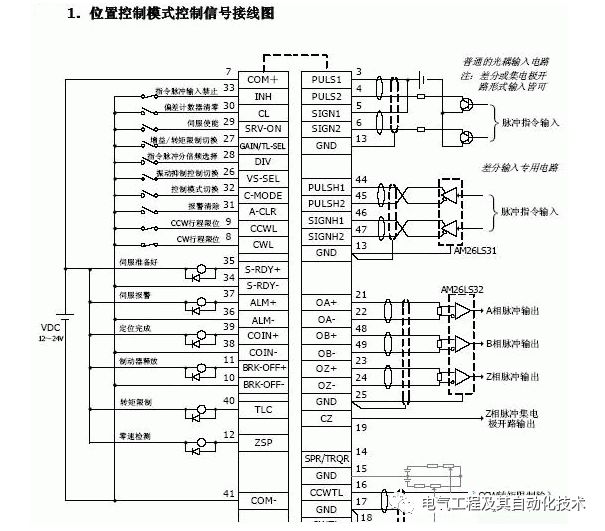
什么是伺服電機的原點設置?伺服電機零點和原點的區別 伺服電機的原點設置,簡單來說,就是確定電機的起始位置或參考位置。在使用伺服電機控制系統時,需要將電機的位置與設定的參考位置進行對齊,以確保精準
2023-12-25 13:57:591135 伺服驅動器是現代工業自動化系統中常用的一種執行控制的設備,它能夠通過電信號控制電機的速度和位置。設置伺服驅動器的參數是使用伺服驅動器前必須要進行的一項工作,下面將從硬件安裝和軟件配置兩個方面詳細介紹
2024-01-11 10:51:13813 伺服電機和伺服電機驅動器是緊密相關的兩個部分,它們通常作為一個完整的系統來實現精確的運動控制。
2024-01-13 17:53:221246 伺服電機原理與應用 一、伺服電機原理 伺服電機是一種控制系統,通過傳感器接受反饋信號,將輸出信號與輸入信號進行比較,并通過控制器對輸出信號進行調整,以實現精確控制電機運動的位置、速度和力矩。伺服電機
2024-01-22 16:32:26285 伺服電機是不是也可以改變“相序”來實現電機正反轉呢? 伺服電機是一種常見的電動執行器,廣泛應用于工業自動化、機器人、CNC機床等領域。除了控制轉速和位置精度外,伺服電機還可以實現正反轉功能。反轉操作
2024-02-18 14:35:29542 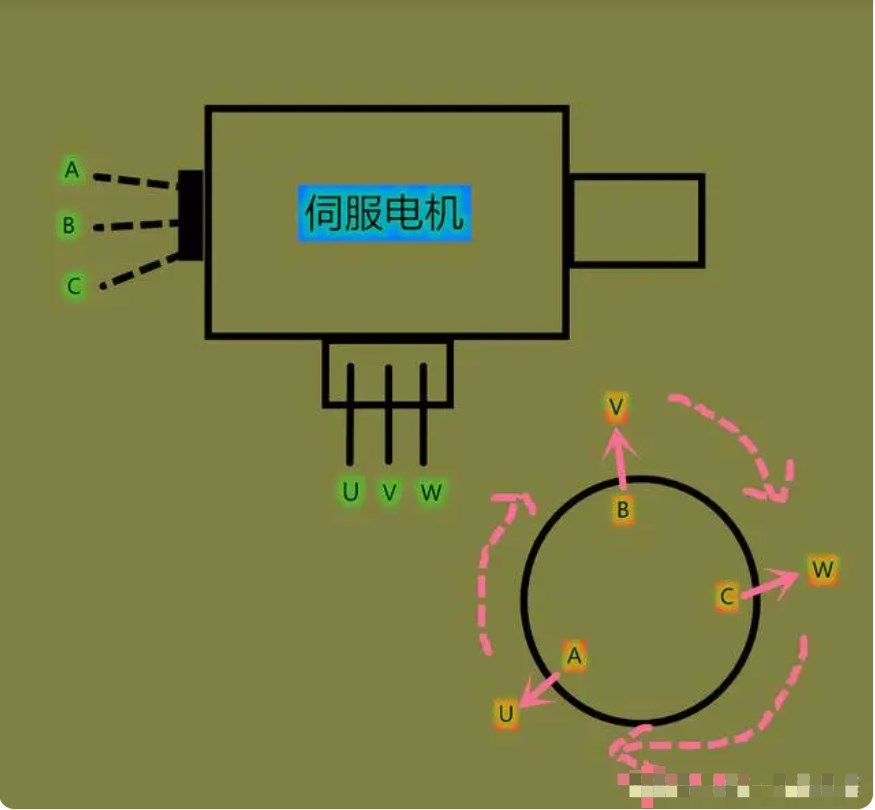
零點位置是通過程序復位控制回零或者在回零過程中感應到原點限位的時候,把當前位置值清零,表示原點或零點,一切位置都是以原點為基礎,確定零點位置的時候,應先確定運動的正向和負向,以及電機的實際運動方向。
2024-03-20 14:07:4746
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論