 電子發(fā)燒友App
電子發(fā)燒友App


摘要:加減速控制是數(shù)控系統(tǒng)的關(guān)鍵技術(shù),對提高數(shù)控系統(tǒng)的及速度有重要的意義。提出了一種步進(jìn)電機(jī)三軸聯(lián)動(dòng)的快速加減速算法--動(dòng)態(tài)查表法,該算法結(jié)合DDA 插補(bǔ)算法,可以用普通的單片機(jī)實(shí)現(xiàn)多種加減速曲線的運(yùn)動(dòng)控制,具有運(yùn)算速度快、高等優(yōu)點(diǎn)。
1 引言
步進(jìn)電機(jī)具有快速啟停能力強(qiáng)、高、轉(zhuǎn)速容易控制的特點(diǎn)。但是,步進(jìn)電動(dòng)機(jī)應(yīng)避免轉(zhuǎn)動(dòng)速率的突變,而且從停止到開始轉(zhuǎn)動(dòng)有一個(gè)較低的起動(dòng)頻率,隨后才可以平緩地過渡到較高的轉(zhuǎn)速。相應(yīng)地在步進(jìn)電機(jī)制動(dòng)時(shí),也應(yīng)該平緩過渡。如果由于啟動(dòng)和停止控制不當(dāng),步進(jìn)電機(jī)會(huì)出現(xiàn)啟動(dòng)時(shí)抖動(dòng)和停止時(shí)過沖的現(xiàn)象,從面影響系統(tǒng)的控制[1][2][3]。為避免這種情況的發(fā)生,要對步進(jìn)電機(jī)進(jìn)行加減速控制。加減速控制是數(shù)控系統(tǒng)的關(guān)鍵技術(shù),對提高數(shù)控系統(tǒng)的及速度有重要的意義。加減速控制也得到了廣泛的研究與應(yīng)用。
目前國內(nèi)外步進(jìn)電機(jī)加減速控制曲線主要包括三種[4]:直線型加減速速度曲線(也稱為梯形曲線)、指數(shù)型加減速曲線、S 型加減速曲線。控制算法主要有查表法和插補(bǔ)迭代法。查表法的原理是設(shè)置一張時(shí)間間隔表,表中的每一項(xiàng)都對應(yīng)一個(gè)轉(zhuǎn)速,時(shí)間間隔按一定的規(guī)律變化 [1]。插補(bǔ)迭代法的原理是根據(jù)前一步的基準(zhǔn)點(diǎn)速度和加、減、勻速狀態(tài)來確定當(dāng)前步的基準(zhǔn)點(diǎn)速度[4][5]。
這兩種控制算法都有各自的適用范圍,查表法適用于單軸的加減速控制,具有算法簡單、快速的特點(diǎn),但不能適用于多軸聯(lián)動(dòng)。插補(bǔ)迭代算法適用于高的控制,算法復(fù)雜,對處理器的要求較高,一般需要用到DSP 等處理器[4]。本文結(jié)合兩種算法的優(yōu)點(diǎn),設(shè)計(jì)了一種“動(dòng)態(tài)查表法”來實(shí)現(xiàn)三軸聯(lián)動(dòng)的快速加減速算法。動(dòng)態(tài)查表法即有查表法簡單、快速的特點(diǎn),又能夠用一般的單片機(jī)來實(shí)現(xiàn)高的多軸聯(lián)動(dòng)加減速控制。
2 動(dòng)態(tài)查表法
根據(jù)線性插補(bǔ)原理,各插補(bǔ)軸的位移與速度比相等。在加減速過程中,各插補(bǔ)軸的速度、加速度分別與合成的速度、加速度對應(yīng)成比例[5]。當(dāng)對合成速度按某種加減速方法進(jìn)行加減速時(shí),各插補(bǔ)軸在保證空間軌跡的同時(shí),也應(yīng)按相同的加減速方法進(jìn)行加減速。查表法具有簡單、快速的特點(diǎn),但查表法必須事先確定一張加減速的速度表格,不能按比例應(yīng)用到多軸聯(lián)動(dòng)的場合。本文的思路是結(jié)合數(shù)字積分法,在加工某條線段前先按比例快速計(jì)算好相應(yīng)的速度表格,再用查表法來完成加減速控制,即“動(dòng)態(tài)查表法”。
數(shù)字積分法,也稱 DDA(Digital Differential Analyzer) ,它是建立在數(shù)字積分器基礎(chǔ)上的一種插補(bǔ)算法,其特點(diǎn)是易于實(shí)現(xiàn)多坐標(biāo)插補(bǔ)聯(lián)動(dòng)[6]。每一軸設(shè)置一個(gè)累加器,三軸聯(lián)動(dòng)需要設(shè)置三個(gè)累加器,每進(jìn)行插補(bǔ),對三個(gè)累加器分別累加。哪一軸的累加器有溢出則該軸延遲一個(gè)定時(shí)周期進(jìn)給一步(注:本文中的“進(jìn)給一步”代表發(fā)脈沖的高電平或低電平,兩次“進(jìn)給一步”代表一個(gè)完整的脈沖)。在實(shí)際應(yīng)用中,會(huì)設(shè)定一個(gè)較大的整數(shù)N,一般是2m,本文設(shè)置的是0x8000,即215。當(dāng)累加超過該數(shù)時(shí),視為溢出。相應(yīng)的,根據(jù)單片機(jī)的定時(shí)周期,加工速度將折算成兩個(gè)整數(shù)用于實(shí)際的插補(bǔ)運(yùn)算,一個(gè)整數(shù)是n,代表過n 個(gè)定時(shí)周期進(jìn)給一步,另一個(gè)是dn,代表累加數(shù),當(dāng)dn 累加到達(dá)N 時(shí),延遲一個(gè)定時(shí)周期進(jìn)給一步。則:
V 代表的是指定的加工速度,做加減速控制的加速過程需要將速度從起跳速度按照一定的曲線加速到V,減速過程需要將速度從V 再減到起跳速度。
本文設(shè)計(jì)了一系列速度檔位,檔位就是起跳速度,然后逐步增加到V,每檔速度同時(shí)對應(yīng)一個(gè)脈沖數(shù)組,及走過多少脈沖后切換到另外一個(gè)速度檔位。脈沖與速度構(gòu)成的曲線可以是梯形曲線、指數(shù)型加減速曲線或S 型加減速曲線。每個(gè)速度檔位都按照相同的比例縮小速度V,三軸都按照相同的比例,就滿足了線性插補(bǔ)原理,可以在保證空間軌跡的同時(shí),各軸按照相同的加減速方法進(jìn)行加減速。但計(jì)算速度檔位必須在加工線段前進(jìn)行,而且不能有除法運(yùn)算,否則一般的單片機(jī)難以達(dá)到實(shí)時(shí)性的要求。按一定的比例縮小V 必須用到除法,要避免除法運(yùn)算就只能采用移位運(yùn)算來代替。由式(1)~(3)可知,k 與V 成反比,而n 和dn 分別對應(yīng)k 的整數(shù)和小數(shù)部分。假設(shè)要得到V*p/q 對應(yīng)的n 和dn,其中p、q 都是自然數(shù)且p《q。則k’=k*q/p,要用移位來代替除法必須p=2m,而且要爭取各速度檔位相對均勻。
本文設(shè)計(jì)的速度檔位因子分別是:1/16, 1/8, 1/4, 2/5,1/2, 2/3, 4/5, 8/9, 共八個(gè)檔位。對要求高的還可以設(shè)置更多的檔位。確定速度檔位因子后,就可以通過一系列的移位指令來計(jì)算V*p/q 對應(yīng)的n 和dn,以4/5 為例:計(jì)算步驟如下:
n=ctrlDatas[i].n*5;// ctrlDatas[i].n 是給定速度對應(yīng)的n,*5 也可以用左移位+加法代替
ns[j]=n》》2;//ns[j]是每個(gè)速度檔位對應(yīng)的n,》》2 代表除以4
dns[j]=(ctrlDatas[i].dn*5)》》2;// dns[j]是每個(gè)速度檔位對應(yīng)的dn
dns[j]=dns[j]+((n & 0x3)《《13);//將n 的余數(shù)補(bǔ)充到dn
ns[j]+=dns[j]》》15;//將dn 對應(yīng)的整數(shù)部分補(bǔ)充到n
dns[j]=dns[j] & 0x7FFF;//取余數(shù)
可見通過一系列的位運(yùn)算和加法運(yùn)算實(shí)現(xiàn)了各速度檔位的計(jì)算,而且非常高。實(shí)驗(yàn)證明,常規(guī)的單片機(jī)完全可以達(dá)到實(shí)時(shí)性的要求。
3 動(dòng)態(tài)查表算法描述
動(dòng)態(tài)查表算法有兩部分,一是加工前計(jì)算各檔位速度vc,另一個(gè)是實(shí)時(shí)的加減速控制rtvc。
下面分別描述。
3.1 算法vc,用于加工線段前的預(yù)處理,計(jì)算各軸各檔位速度對應(yīng)的n 和dn:
(1)求長軸所在的索引longestIndex。本文將三軸分別編號(hào)成0,1,2,分別代表XYZ三軸,長加工軸代表該軸加工速度快,以該軸為基準(zhǔn)進(jìn)行加減速,其他軸同步按比例進(jìn)行加減速
(2)如果長加工軸的加工脈沖小于系統(tǒng)指定脈沖,以系統(tǒng)指定的低速進(jìn)行加工,清除加減速標(biāo)志,不進(jìn)行加減速控制。算法結(jié)束,否則轉(zhuǎn)第(3)步
(3)如果某軸的速度低于指定速度,該軸不進(jìn)行加減速控制,全部按照指定速度進(jìn)行加工。算法結(jié)束,否則轉(zhuǎn)第(4)步
(4)按照第2 節(jié)的速度檔位劃分及移位算法計(jì)算各軸各檔位速度對應(yīng)的n 和dn。算法結(jié)束3.2 算法rtvc,用于實(shí)時(shí)加減速控制,根據(jù)發(fā)出脈沖計(jì)數(shù)進(jìn)行相應(yīng)的加減速控制:
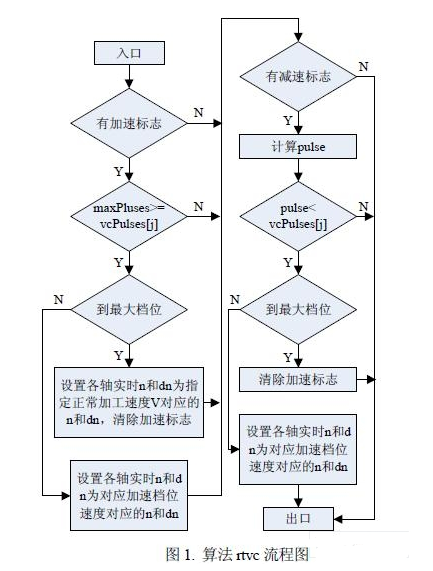
(1)如果有加速標(biāo)志,代表還需要進(jìn)行加速控制,轉(zhuǎn)第(2)步,否則轉(zhuǎn)第(5)步
(2)如果長加工軸的加工脈沖超過某檔位對應(yīng)的脈沖數(shù),轉(zhuǎn)第(3)步,否則轉(zhuǎn)第(5)步
(3)如果達(dá)到檔位,代表已經(jīng)完成加速,設(shè)置各軸實(shí)時(shí)n 和dn 為指定正常加工速度V 對應(yīng)的n 和dn,清除加速標(biāo)志,轉(zhuǎn)第(5)步。否則轉(zhuǎn)第(4)步
(4)設(shè)置各軸實(shí)時(shí)n 和dn 為對應(yīng)加速檔位速度對應(yīng)的n 和dn
(5)如果有減速標(biāo)志,代表需要進(jìn)行減速控制,轉(zhuǎn)第(6)步,否則算法結(jié)束
(6)計(jì)算長加工軸距離加工終點(diǎn)還有多少脈沖pulse
(7)如果pulse 小于某檔位對應(yīng)的脈沖數(shù),轉(zhuǎn)第(8)步,否則算法結(jié)束
(8)如果達(dá)到檔位,代表已經(jīng)完成減速,清除減速標(biāo)志,算法結(jié)束,否則轉(zhuǎn)第(9)步
(9)設(shè)置各軸實(shí)時(shí)n 和dn 為對應(yīng)減速檔位速度對應(yīng)的n 和dn。
算法結(jié)束算法 rtvc 的流程圖如圖1 所示,算法vc 的流程圖省略。
算法 vc 只需要在加工某線段前執(zhí)行,而算法rtvc 用于實(shí)時(shí)加減速控制,需要在單片機(jī)的主循環(huán)里面反復(fù)調(diào)用,但由于調(diào)用rtvc 前速度表格已經(jīng)計(jì)算好,只需查表即可,因此算法的實(shí)時(shí)性非常好。
在實(shí)際的加工程序中,除了增加以上兩個(gè)算法之外,還是按照常規(guī)的DDA 算法進(jìn)行積分插補(bǔ),按照常規(guī)判斷加工終點(diǎn)到達(dá)等等,不再贅述。
4 總結(jié)
動(dòng)態(tài)查表法用到的表格有兩個(gè),一個(gè)是切換各檔位速度需要走過的脈沖,另一個(gè)的各軸各檔位速度對應(yīng)的n 和dn。后一個(gè)表格是動(dòng)態(tài)計(jì)算生成的。調(diào)整前一個(gè)表格可以實(shí)現(xiàn)不同的加減速曲線,因此動(dòng)態(tài)查表法可以實(shí)現(xiàn)各種加減速曲線,根據(jù)實(shí)際加工情況自由選擇,而不需要增加算法復(fù)雜度。同時(shí),計(jì)算各檔位速度對應(yīng)的n 和dn 只需要進(jìn)行一系列的位運(yùn)算和加法運(yùn)算,一般的單片機(jī)即可達(dá)到良好的實(shí)時(shí)性。
動(dòng)態(tài)查表法已經(jīng)在數(shù)控點(diǎn)膠機(jī)上得到了很好的應(yīng)用,實(shí)踐表明,用一般的ARM 芯片完全滿足了實(shí)時(shí)性和高的要求。動(dòng)態(tài)查表法同樣可以應(yīng)用到其他多軸聯(lián)動(dòng)運(yùn)動(dòng)控制場合。
本項(xiàng)目目前出于市場推廣階段,已經(jīng)創(chuàng)造經(jīng)濟(jì)效益100 多萬元。
作者創(chuàng)新點(diǎn):本文設(shè)計(jì)的步進(jìn)電機(jī)三軸聯(lián)動(dòng)快速加減速算法-動(dòng)態(tài)查表法還沒有文獻(xiàn)記載,屬作者原創(chuàng)。該算法可以實(shí)現(xiàn)不同的加減速曲線,具有簡單高效的特點(diǎn),用普通的單片機(jī)即可達(dá)到良好的實(shí)時(shí)性。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論