 電子發燒友App
電子發燒友App


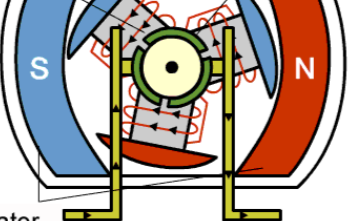
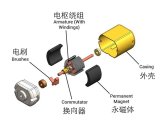
最基本的電機是“DC電機(有刷電機)”。在磁場中放置線圈,通過流動的電流,線圈會被一側的磁極排斥,同時被另一側磁極所吸引,在這種作用下不斷旋轉。在旋轉過程中令通向線圈中的電流反向流動,使其持續旋轉。電機中有個叫"換向器"的部分是靠"電刷"供電的,"電刷"的位置在"轉向器"上方,隨著旋轉不斷移動。通過改變電刷的位置,可使電流方向發生變化。換向器和電刷是DC電機的旋轉所不可或缺的結構(圖一)。
圖一:DC電機(有刷電機)的運轉示意圖。
換向器切換線圈中電流的流向,反轉磁極的方向,使其始終向右旋轉。電刷向與軸一同旋轉的換向器供電。
活躍于多個領域的電機
我們按電源種類和轉動原理對電機進行了分類(圖2)。讓我們來簡單看看各類電機的特點和用途吧。 ? ?
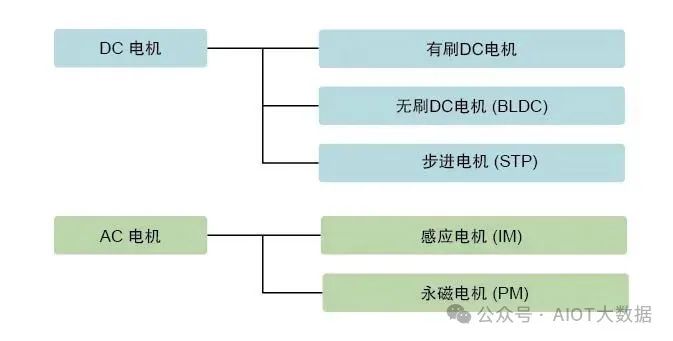
圖2:電機的主要類型
構造簡單而又容易操控的DC電機(有刷電機)通常被用在家電產品的“光盤托盤的開閉”等用途上。或用在汽車的“電動后視鏡的開閉、方向控制”等用途上。雖然它既廉價又能用在多個領域上,但它也有缺陷。由于換向器會和電刷接觸,它的壽命很短,必須定期更換電刷或保修。
步進電機會隨著向其發出的電脈沖數旋轉。它的運動量取決于向其發出的電脈沖數,因此適用于位置調整。在家庭中通常被用于“傳真機和打印機的送紙”等。由于傳真機的送紙步驟取決于規格(刻紋、細致度),因此隨著電脈沖數旋轉的步進電機非常便于使用。很容易解決信號一旦停止機器就會暫時停止的問題。
旋轉數隨電源頻率變化的同步電機被用于“微波爐的旋轉桌”等用途上。電機組里有齒輪減速器,可以得到適合加熱食品的旋轉數。感應電機也受電源頻率的影響,但頻率和旋轉數不一致。以前這類AC電機被用在風扇或洗衣機上。
由此可見,各式各樣的電機活躍于多個領域。其中,BLDC電機(無刷電機)具有怎樣的特點才會用途如此之廣呢? ? ?
BLDC電機是如何旋轉的?
BLDC電機中的“BL”意為“無刷”,就是DC電機(有刷電機)中的“電刷”沒有了。電刷在DC電機(有刷電機)里扮演的角色是通過換向器向轉子里的線圈通電。那么沒有電刷的BLDC電機是如何向轉子里的線圈通電的呢?原來BLDC電動機電機采用永磁體來做轉子,轉子里是沒有線圈的。由于轉子里沒有線圈,所以不需要用于通電的換向器和電刷。取而代之的是作為定子的線圈(圖3)。
DC電機(有刷電機)中被固定的永磁體所制造出的磁場是不會動的,通過控制線圈(轉子)在其內部產生的磁場來旋轉。要通過改變電壓來改變旋轉數。BLDC電機的轉子是永磁體,通過改變周圍的線圈所產生的磁場的方向使轉子旋轉。通過控制通向線圈的電流方向和大小來控制轉子的旋轉。
圖3:BLDC電機的運轉示意圖。
BLDC電機將永磁體作為轉子。由于無需向轉子通電,因此不需要電刷和換向器。從外部對通向線圈的電進行控制。 ? ?
BLDC電機的優點
BLDC電機的定子上有三個線圈,每個線圈有兩根電線,電機中共有六根引出線。實際上,由于是內部接線,通常只需要三根線,但還是比先前所說的DC電機(有刷電機)要多出一根。純靠連接電池的正負極是不會動的。至于如何運行BLDC電機將在本系列的第二回中進行說明。此次我們要關注的是BLDC電機的優點。
BLDC電機的第一個特點是“高效率”。可以控制它的回旋力(扭矩)始終保持最大值。DC電機(有刷電機)的話,旋轉過程中最大扭矩只能保持一個瞬間,無法始終保持最大值。若DC電機(有刷電機)想要得到和BLDC電機一樣大的扭矩,只能加大它的磁鐵。這就是為什么小型BLDC電機也能發出強大力量的原因。
第二個特點是“良好的控制性”,與第一個有所關聯。BLDC電機可以絲毫不差的得到你所想要的扭矩、旋轉數等。BLDC電機可以精確地反饋目標旋轉數、扭矩等。通過精確的控制可以抑制電機的發熱和電力的消耗。若是電池驅動,則能通過周密的控制,延長驅動時間。
除此之外還有耐用,電氣噪音小等特點。上述兩點是無電刷所帶來的優勢。而DC電機(有刷電機)由于電刷和換向器之間的接觸,長時間使用會有損耗。接觸的部分還會產生火花。尤其是換向器的縫隙碰到電刷時會出現巨大的火花和噪音。若不希望使用過程中產生噪音,會考慮采用BLDC電機。
BLDC電機適用于這些方面
高效率、多樣操控、壽命長的BLDC電機一般會用在哪些地方呢?往往被用于能夠發揮其高效率、壽命長的特點,被連續使用的產品中。例如:家電。人們很早就開始使用洗衣機和空調了。最近電風扇中也開始采用BLDC電機,并成功促使消耗電力大幅度下降。正是因為效率高才讓消耗電力下降的。
吸塵機中也采用了BLDC電機。在某個事例中,通過變更控制系統,實現了旋轉數的大幅度上升。這個事例體現了BLDC電機的良好控制性。 ? ?
作為重要存儲介質的硬盤,其旋轉部分也采用了BLDC電機。由于它是需要長時間運轉的電機,因此耐用性很重要。當然,它還有極力抑制電力消耗的用途。這里的高效率也和電力的低消耗有關。
BLDC電機的用途還有很多
BLDC電機有望被應用在更廣泛的領域中。BLDC電機將會在小型機器人,尤其是在制造以外的領域提供服務的“服務機器人”中得到廣泛應用。“定位對于機器人很重要,不是應該使用隨電脈沖數運行的步進電機嗎?”或許會有人這么想。但是在力量控制方面,BLDC電機更合適。另外,若采用步進電機,像機器人手腕這樣的構造要固定在某個位置需要提供相當大的電流。若是BLDC電機,則能配合外力只提供所需的電力,從而抑制電力的消耗。
還可用于運輸方面。一直以來,老年人電動車或高爾夫球車中大多采用簡單的DC電機,但最近都開始采用具有良好控制性的高效率BLDC電機了。可以通過細微的控制,延長電池的持續時間。BLDC電機還適用于無人機中。尤其是多軸機架的無人機,由于它是通過改變螺旋槳的旋轉數來控制飛行姿態的,因此能夠精密控制旋轉的BLDC電機很有優勢。
怎么樣?BLDC電機是效率高、控制性良好、壽命長的優質電機。但是,要想將BLDC電機的力量發揮到極致,則需要正確的控制。該如何操作呢?
僅靠連接無法轉動
內轉子型BLDC電機是典型的BLDC電機的一種,其外觀與內部構造如下所示(圖1)。帶刷DC電機(以下稱為DC電機)的轉子上有線圈,外側放有永磁體。BLDC電機的轉子上有永磁體,外側是線圈。BLCD電機的轉子沒有線圈,是永磁體,因此沒有必要在轉子上通電。實現了不帶通電用的電刷的“無刷型”。
另一方面,與DC電機相比,控制也變得更難了。并不是只要將電機上的電纜接上電源就好了。本來就連電纜數目都不一樣。和“將正極(+)和負極(-)連上電源”的方式不同。 ? ?
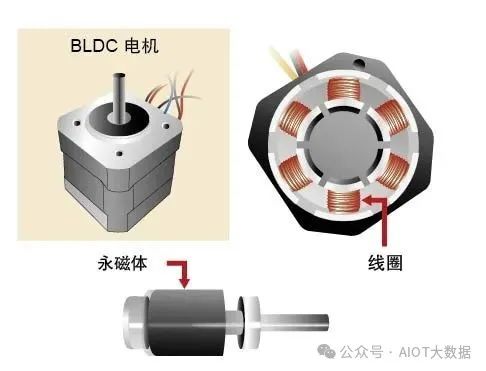
圖1:BLDC電機的外觀及內部構造
轉子是永磁體,因此無法通電。無需電刷及換向器,可謀求延長使用壽命
改變磁通量的方向
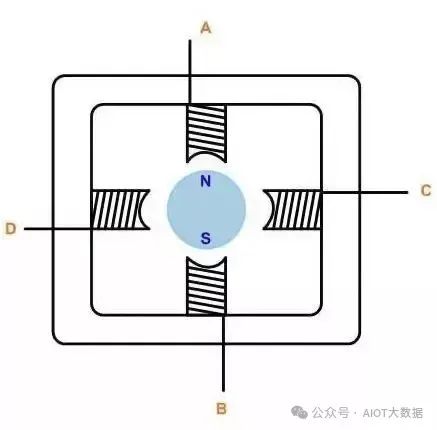
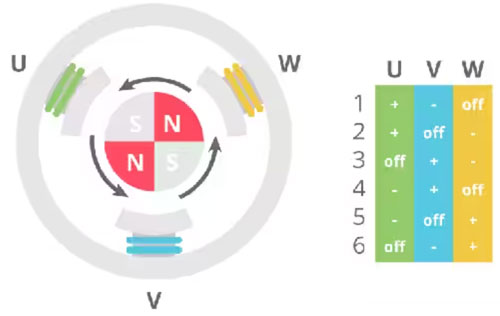
為了轉動BLDC電機,必須控制線圈的電流方向及時機。圖2-A是將BLDC電機的定子(線圈)和轉子(永磁體)模式化的結果。使用該圖片,思考一下轉子旋轉的情況吧。思考使用3個線圈的情況。雖然實際上也有使用6個或以上的線圈的情況,但在考慮原理的基礎上,每120度放一個線圈,使用3個線圈。電機將電氣(電壓、電流)轉換為機械性旋轉。圖2-A的BLDC電機又是如何轉動呢?先來看一看電機中發生了什么吧。 ? ?
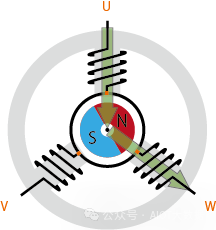
圖2-A:BLDC電機轉動原理
BLDC電機中每隔120度放置一個線圈,總共放置三個線圈,控制通電相或線圈的電流
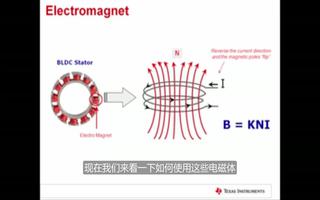
如圖2-A所示,BLDC電機使用3個線圈。這三個線圈用以在通電后生成磁通量,將其命名為U、V、W。將該線圈通電試試看吧。線圈U(以下簡稱為“線圈”)上的電流路徑記為U相,V的記錄為V相,W的記錄為W相。接下來看一看U相吧。向U相通電后,將產生如圖2-B所示的箭頭方向的磁通量。
但實際上,U、V、W的電纜都是互相連接著的,因此無法僅向U相通電。在這里,從U相向W相通電,會如圖2-C所示在U、W產生磁通量。合成U和W的兩個磁通量,變為圖2-D所示的較大的磁通量。永磁體將進行旋轉,以使該合成磁通量與中央的永磁體(轉子)的N極方向相同。
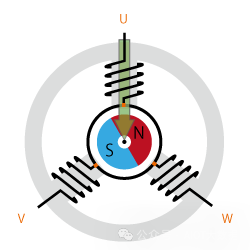
圖2-B:BLDC電機的轉動原理
從U相向W向通電。首先,只關注線圈U部分,則發現會產生如箭頭般的磁通量 ? ?
圖2-C:BLDC電機的轉動原理
從U相向W相通電,則會產生方向不同的2個磁通量
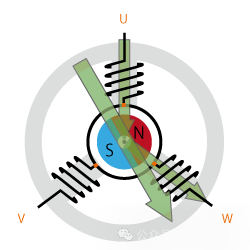
圖2-D:BLDC電機的轉動原理從U相向W相通電,可以認為產生了兩個磁通量合成的磁通量
若改變合成磁通量的方向,則永磁體也會隨之改變。配合永磁體的位置,切換U相、V相、W相中通電的相,以變更合成磁通量的方向。連續執行此操作,則合成磁通量將發生旋轉,從而產生磁場,轉子旋轉。
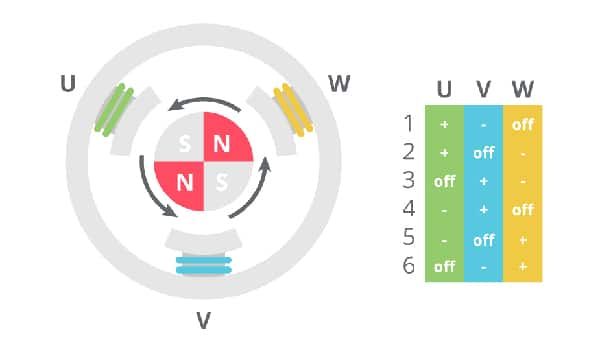
圖3所示的是通電相與合成磁通量的關系。在該例中,按順序從1-6變更通電模式,則合成磁通量將順時針旋轉。通過變更合成磁通量的方向,控制速度,可控制轉子的旋轉速度。將切換這6種通電模式,控制電機的控制方法稱為“120度通電控制”。 ? ?
圖3:轉子的永久磁石會像被合成磁通量牽引一樣旋轉,電機的軸也會因此旋轉
使用正弦波控制,進行流暢的轉動
接下來,盡管在120度通電控制下合成磁通量的方向會發生旋轉,但其方向不過只有6種。比如將圖3的“通電模式1”改為“通電模式2”,則合成磁通量的方向將變化60度。然后轉子將像被吸引一樣發生旋轉。接下來,從“通電模式2”改為“通電模式3”,則合成磁通量的方向將再次變化60度。轉子將再次被該變化所吸引。這一現象將反復出現。這一動作將變得生硬。有時這動作還會發出噪音。
能消除120度通電控制的缺點,實現流暢的轉動的正是“正弦波控制”。在120度通電控制中,合成磁通量被固定在了6個方向。進行控制,使其進行連續的變化。在圖2-C的例子中,U和W生成的磁通量大小相同。但是,若能較好地控制U相、V相、W相,則可讓線圈各自生成大小各異的磁通量,精密地控制合成磁通量的方向。調整U相、V相、W相各相的電流大小,與此同時生成了合成磁通量。通過控制這一磁通量連續生成,可使電機流暢地轉動。 ? ?
圖4:正弦波控制
正弦波控制可控制3相上的電流,生成合成磁通量,實現流暢的轉動。可生成120度通電控制無法生成的方向上生成合成磁通量
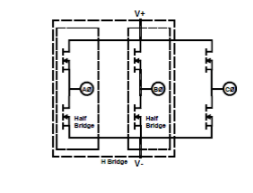
使用逆變器控制電機
那么U、V、W各相上的電流又如何呢?為便于理解,回想120度通電控制的情況看看吧。請再次查看圖3。在通電模式1時,電流從U流至W;在通電模式2時,電流從U流至V。可以看出,每當有電流流動的線圈的組合發生改變時,合成磁通量箭頭的方向也會發生變化。
接下來,請看通電模式4。在該模式下,電流從W流至U,與通電模式1的方向相反。在DC電機中,像這樣的電流方向的轉換是由換向器和刷子的組合來進行了。但是,BLDC電機不使用這樣的接觸型的方法。使用逆變器電路,更改電流的方向。在控制BLDC電機時,一般使用的是逆變器電路。
另外逆變器電路可改變各相中的外加電壓,調整電流值。電壓的調整中,常用的是PWM(PulseWidthModulation=脈沖寬度調制)。PWM是一種通過調整脈沖ON/OFF的時間長度改變電壓的方法,重要的是ON時間和OFF時間的比率(占空比)變化。若ON的比率較高,可以得到和提高電壓相同的效果。若ON的比率下降,則可以得到和電壓降低相同的效果(圖5)。
為了實現PWM,現在還有配備了專用硬件的微電腦。進行正弦波控制時需控制3相的電壓,因此比起只有2相通電的120度通電控制來說,軟件要稍稍復雜一些。逆變器是對驅動BLDC電機必要的電路。交流電機中也使用了逆變器,但可以認為家電產品中所說的“逆變器式”幾乎使用的是BLDC電機。 ? ?
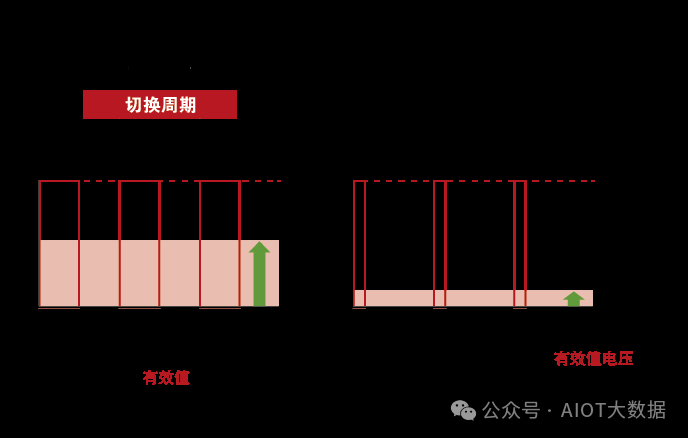
圖5:PWM輸出與輸出電壓的關系
變更某時間內的ON時間,以變更電壓的有效值。
ON時間越長,有效值越接近施加100%電壓時(ON時)的電壓
使用位置傳感器的BLDC電機
以上是BLDC電機的控制的概況。BLDC電機通過改變線圈生成的合成磁通量的方向,使轉子的永磁體隨之變化。
實際上,在以上的說明中,還有一點沒有提到。即BLDC電機中的傳感器的存在。BLDC電機的控制是配合著轉子(永磁體)的位置(角度)進行的。因此,獲取轉子位置的傳感器是必需的。若沒有傳感器得知永磁體的方向時,轉子可能會轉至意料之外的方向。有傳感器提供信息的話,就不會出現這樣的情況了。
表1中顯示的是BLDC電機主要的位置檢測用傳感器的種類。根據控制方式的不同,需要的傳感器也是不同的。在120度通電控制中,為判斷要對哪個相通電,配備了可每60度輸入一次信號的霍爾效應傳感器。另一方面,對于精密控制合成磁通量的“矢量控制”(在下一項中說明)來說,轉角傳感器或光電編碼器等高精度傳感器較為有效。 ? ?
通過使用這些傳感器可以檢測出位置,但也會帶來一些缺點。傳感器防塵能力較弱,而且維護也是不可或缺的。可使用的溫度范圍也會縮小。使用傳感器或為此增加配線都會造成成本的上升,而且高精度傳感器本身就價格高昂。于是,“無傳感器”這一方式登場了。它不使用位置檢測用傳感器,以此控制成本,且不需要傳感器相關的維護。但此次為了說明原理,因此假定已從位置傳感器獲得了信息來吧。
?
?
| 傳感器種類 | 主要用途 | 特征 |
| 霍爾效應傳感器 | 120度通電控制 | 每60度獲取一次信號。價格較低。不耐熱。 |
| 光電編碼器 | 正弦波控制、矢量控制 | 有增量型(可得知原位置開始的移動距離)和絕對型(可得知當前位置的角度)兩種。分辨率高,但防塵埃能力較弱。 |
| 轉角傳感器 | 正弦波控制、矢量控制 | 分辨率高。即使在牢固的惡劣環境下也可使用。 |
?
?
表1:位置檢測專用傳感器的種類及特征
通過矢量控制時刻保持高效率
正弦波控制為3相通電,流暢地改變合成磁通量的方向,因此轉子將流暢地旋轉。120度通電控制切換了U相、V相、W相中的2相,以此來使電機轉動,而正弦波控制則需要精確地控制3相的電流。而且控制的值是時刻變化的交流值,因此,控制變得更為困難。 ? ?
在這里登場的便是矢量控制了。矢量控制可通過坐標變換,把3相的交流值作為2相的直流值進行計算,因此可簡化控制。但是,矢量控制計算需要高分辨率下的轉子的位置信息。位置檢測有兩種方法,即使用光電編碼器或轉角傳感器等位置傳感器的方法,以及根據各相的電流值進行推算的無傳感器方法。通過該坐標變換可直接控制扭矩(旋轉力)的相關電流值,從而實現沒有多余電流的高效控制。
但是,矢量控制中需要進行使用三角函數的坐標變換,或復雜的計算處理。因此,大多情況下都會使用計算能力較強的微電腦作為控制用微電腦,比如配備了FPU(浮點運算器)的微電腦等。
無刷直流電機(BLDC:BrushlessDirectCurrentMotor),也被稱為電子換向電機(ECM或EC電機)或同步直流電機,是一種使用直流電(DC)電源的同步電機。無刷直流電機(BLDC:BrushlessDirectCurrentMotor)實質上為采用直流電源輸入,并用逆變器變為三相交流電源,帶位置反饋的永磁同步電機。
無刷電機(BLDC:BrushlessDirectCurrentMotor)屬于自換流型(自我方向轉換),因此控制起來更加復雜。
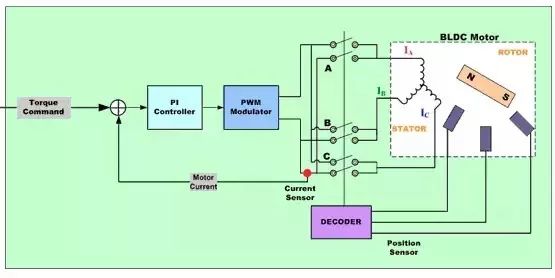
BLDC電機(BrushlessDirectCurrentMotor)控制要求了解電機進行整流轉向的轉子位置和機制。對于閉環速度控制,有兩個附加要求,即對于轉子速度/或電機電流以及PWM信號進行測量,以控制電機速度功率。
BLDC電機(BrushlessDirectCurrentMotor)可以根據應用要求采用邊排列或中心排列PWM信號。大多數應用僅要求速度變化操作,將采用6個獨立的邊排列PWM信號。這就提供了最高的分辨率。如果應用要求服務器定位、能耗制動或動力倒轉,推薦使用補充的中心排列PWM信號。 ? ?
為了感應轉子位置,BLDC電機(BrushlessDirectCurrentMotor)采用霍爾效應傳感器來提供絕對定位感應。這就導致了更多線的使用和更高的成本。無傳感器BLDC控制省去了對于霍爾傳感器的需要,而是采用電機的反電動勢(電動勢)來預測轉子位置。無傳感器控制對于像風扇和泵這樣的低成本變速應用至關重要。在采有BLDC電機(BrushlessDirectCurrentMotor)時,冰箱和空調壓縮機也需要無傳感器控制。
電機有各式各樣的種類,而無刷直流電機是當今最理想的調速電機。它集直流電機與交流電機的優點于一身,既有直流電機良好的調整性能,又有交流電機結構簡單、無換向火花、運行可靠和易于維護等優點。因而備受市場歡迎,廣泛應用于汽車、家電、工業設備等領域中。
無刷直流電機克服了有刷直流電機的先天性缺陷,以電子換向器取代了機械換向器,所以無刷直流電機既具有直流電機良好的調速性能等特點,又具有交流電機結構簡單、無換向火花、運行可靠和易于維護等優點。
無刷直流電機(BrushlessDirectCurrentMotor)是當今最理想的調速電機。它集直流電機與交流電機的優點于一身,既有直流電機良好的調整性能,又有交流電機結構簡單、無換向火花、運行可靠和易于維護等優點。
無刷直流電機(BrushlessDirectCurrentMotor)發展歷史
直流無刷電機是在有刷電機的基礎上發展而來的,其結構上要比有刷電機結構復雜。直流無刷電機由電機主體和驅動器組成,區別于有刷直流電機,無刷直流電機(BrushlessDirectCurrentMotor)不使用機械的電刷裝置,而是采用方波的自控式永磁同步電機,并以霍爾傳感器取代碳刷換向器,以釹鐵硼作為轉子的永磁材料。(需要指出的是,在上世紀誕生電機的時候,產生的實用性電機卻是無刷形式的。)
1740年代:電機發明開始 ? ?
通過蘇格蘭科學家安德魯·戈登(AndrewGordon)的研究工作,電機的早期模型首次出現于1740年代。其他科學家,例如邁克爾·法拉第(MichaelFaraday)和約瑟夫·亨利(JosephHenry)繼續開發早期的電機,嘗試電磁場并發現如何將電能轉化為機械能。
1832年:首款換向器直流電機的發明
1832年,英國物理學家威廉·斯特金(WilliamSturgeon)就發明了第一臺可以提供足夠動力來驅動機械的直流電機,但是由于其低功率輸出,仍有技術缺陷,應用上受到嚴重限制。
1834年:制造了第一臺真正的電機
跟隨Sturgeon的腳步,美國佛蒙特州的托馬斯·達文波特(ThomasDavenport)于1834年發明了第一臺正式的電池供電的電機,從而創造了歷史。這是第一臺具有足夠功率執行任務的電動馬達,他的發明被用于為小型印刷機提供動力。1837年,托馬斯·達文波特和他的妻子艾米莉·達文波特(EmilyDavenport)獲得了第一項直流電機專利。
1886年:實用性直流電機的發明 ? ?
1886年,第一臺可以在可變重量下恒速運行的實用直流電機面世。弗蘭克·朱利安·斯普拉格(FrankJulianSprague)是其發明者。
FrankJulianSprague的“實用”馬達
值得一提的是,該實用性電機采用無刷形式,即交流式鼠籠式異步電機,它不僅消除了火花、繞組兩端的電壓損失,可以以恒定速度輸送功率。但是,異步電機有許多無法克服的缺陷,以致電機技術發展緩慢。
1887年:交流感應電機獲得專利
1887年,尼古拉·特斯拉(NikolaTesla)發明了交流感應電機(ACinductionmotor),并在一年后成功申請了專利。它不適用于公路車輛,但后來由西屋公司的工程師進行了改裝。1892年,設計了第一臺實用的感應電機,接著是旋轉的條形繞組轉子,使該電機適用于汽車應用。
1891年:三相電機的開發 ? ?
1891年,通用電氣開始開發三相感應電機(Threephasemotor)。為了利用繞線轉子設計,GE和西屋公司于1896年簽署了交叉許可協議。
1955年:直流無刷電機時代開始
1955年,美國d.harrison等人首次申請了用晶體管換向線路代替有刷直流電機機械電刷的專利,正式標志著現代無刷直流電機(BrushlessDirectCurrentMotor)的誕生。但當時沒有電機轉子位置檢測器件,該電機沒有起動能力。
1962年:第一臺無刷直流(BLDC)電機的發明
得益于1960年代初期固態技術的進步,1962年,TGWilson和PHTrickey發明了第一臺無刷直流(BLDC)電機,他們稱之為“帶固態換向的直流電機”。無刷電機的關鍵要素是它不需要物理換向器,因此成為計算機磁盤驅動器,機器人和飛機的最流行選擇。
他們利用了霍爾元件來檢測轉子位置并控制繞組電流換相,使無刷直流電機達到實用化,但受到晶體管容量的限制,電機功率相對較小。
1970年代至今:無刷直流電機應用快速發展
70年代以來,隨著新型功率半導體器件(如GTR、MOSFET、IGBT、IPM)相繼出現,計算機控制技術(單片機、DSP、新的控制理論)的快速發展,以及高性能稀土永磁材料(如釤鈷、釹鐵硼)的問世,無刷直流電機(BrushlessDirectCurrentMotor)得到快速發展,容量不斷增大。
技術驅動產業發展,隨著1978年mac經典無刷直流電機及其驅動器的推出,以及80年代方波無刷電機和正弦波無刷直流電機的研發,無刷電機真正開始進入實用階段,并且得到快速發展。
無刷直流電機總體結構及原理
無刷直流電機(BrushlessDirectCurrentMotor)由同步電動機和驅動器組成,是一種典型的機電一體化產品。同步電動機的定子繞組多做成三相對稱星形接法,同三相異步電動機十分相似。 ? ?
BLDCM控制系統結構包括電機本體、驅動電路與控制電路三個主要部分。在工作過程中,電機的電壓、電流和轉子位置信息由控制電路收集、處理并生成相應的控制信號,驅動電路在接收到控制信號后驅動電機本體工作。
無刷直流電機(BrushlessDirectCurrentMotor)主要由帶有線圈繞組的定子、用永磁材料制造的轉子和位置傳感器組成。位置傳感器,根據需要,也可以不配置。
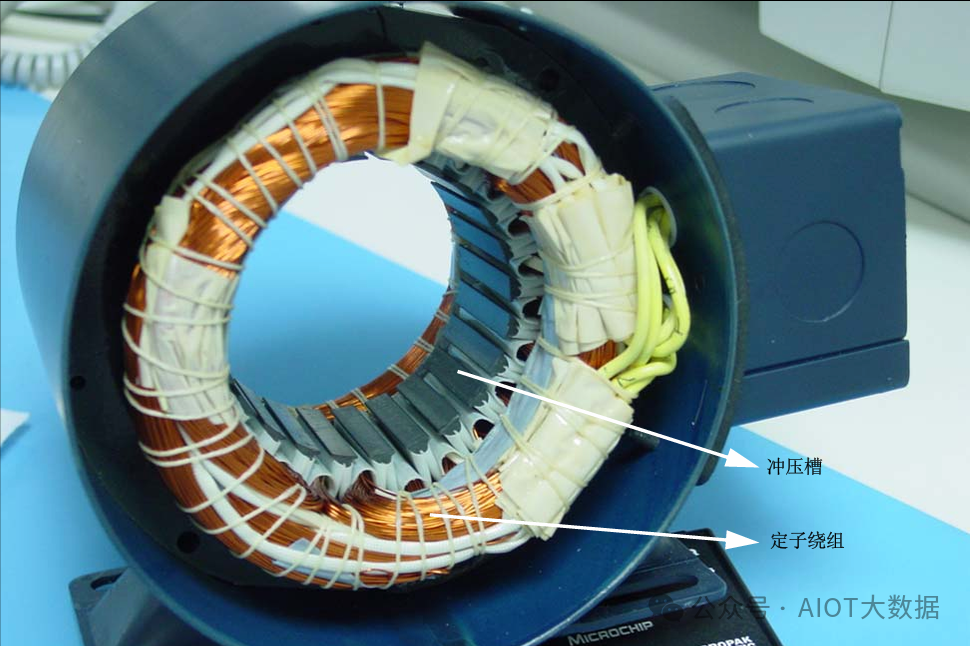
定子
BLDC電機的定子結構與感應電機相似。它由堆疊的鋼疊片組成,并帶有軸向切槽以用于纏繞。BLDC中的繞組與傳統感應電機的繞組略有不同。
BLDC電機定子
通常,大多數BLDC電機由三個定子繞組組成,這三個定子繞組以星形或“Y”形連接(無中性點)。另外,基于線圈互連,定子繞組進一步分為梯形和正弦電動機。
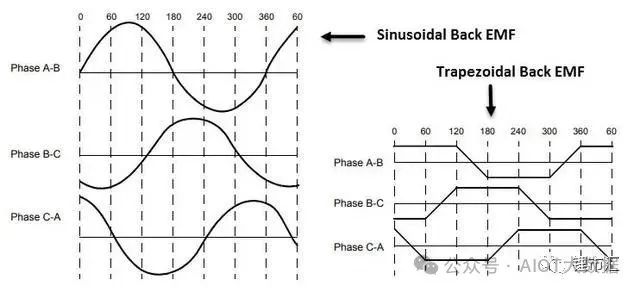
BLDC電機反電動勢
在梯形電動機中,驅動電流和反電動勢均呈梯形形狀(在正弦電動機的情況下為正弦形)。通常,在汽車和機器人技術(混合動力汽車和機器人手臂)中使用額定48V(或以下)的電動機。
轉子
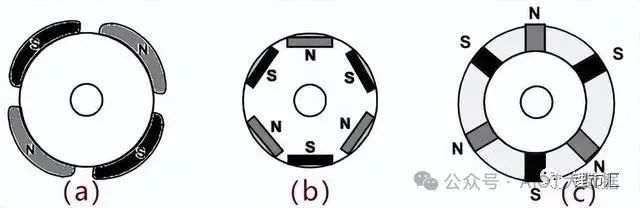
BLDC電動機的轉子部分由永磁體(通常是稀土合金磁體,例如釹(Nd),釤鈷(SmCo)和釹鐵硼(NdFeB)組成。
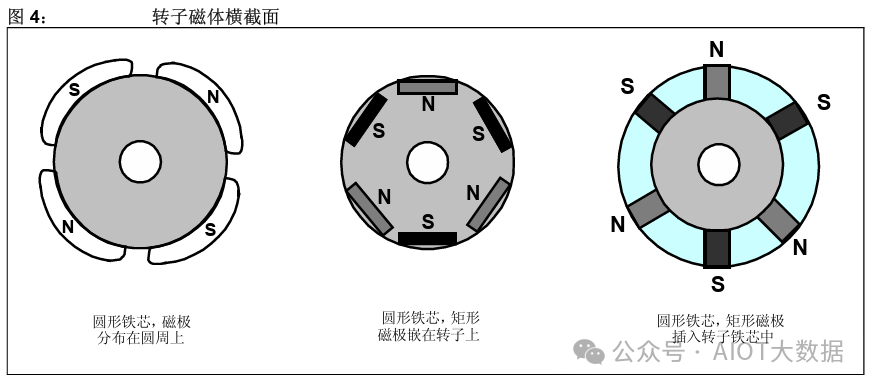
根據應用,極數可以在2到8個之間變化,北極(N)和南極(S)交替放置。下圖顯示了磁極的三種不同布置。
(a)磁體放置在轉子的外周上。
(b)稱為電磁嵌入式轉子,其中矩形永磁體嵌入轉子的鐵心中。
(c)將磁體插入轉子的鐵芯中。 ? ?
BLDC電機轉子
位置傳感器(霍爾傳感器)
由于BLDC電機中沒有電刷,因此換向是電子控制的。為了使電機旋轉,必須順序地給定子繞組通電,并且必須知道轉子的位置(即轉子的北極和南極)才能精確地給一組特定的定子繞組通電。
通常使用霍爾傳感器(根據霍爾效應原理工作)的位置傳感器來檢測轉子的位置并將其轉換為電信號。大多數BLDC電機使用三個霍爾傳感器,這些傳感器嵌入到定子中以檢測轉子的位置。
霍爾傳感器是基于霍爾效應的一種傳感器。1879年美國物理學家霍爾首先在金屬材料中發現了霍爾效應,但是由于金屬材料的霍爾效應太弱而沒有得到應用。隨著半導體技術的發展,開始用半導體材料制作霍爾元件,由于霍爾效應顯著而得到應用和發展。霍爾傳感器是一種當交變磁場經過時產生輸出電壓脈沖的傳感器。脈沖的幅度是由激勵磁場的場強決定的。因此,霍爾傳感器不需要外界電源供電。
霍爾傳感器的輸出將是高電平還是低電平,這取決于轉子的北極是南極還是北極附近。通過組合三個傳感器的結果,可以確定通電的確切順序。
有別于有刷直流電機,無刷直流電機將定子和轉子完全顛倒,電樞繞組被設置在定子側,而把高質量永磁材料鑲嵌于轉子側。BLDCM的電機本體結構主要包括定子電樞繞組、永磁轉子和位置傳感器,三相繞組在電機定子空間上均勻布置,在相位之間分別相差120°電角度。該結構不同于純粹的有刷直流電動機,與交流電動機的定子繞組結構類似,但在電機工作時會由驅動電路向其提供方波交流電。 ? ?
BLDCM選擇全橋三相星形接線六狀態二-二導通方式,在同一時刻,驅動電路中導通兩只MOSFET,相應地,電機本體中兩相定子繞組串聯通電。每電子換相一次,定子磁動勢Fa轉過60°空間電角度,是一個步進式磁動勢,間隔60°時間電角度,Fa作一次跳躍。雖然轉子旋轉連續不斷,但是定子磁動勢轉動方式為步進式,這與真正的交流同步電機旋轉磁動勢相異。BLDCM的Fa與轉子磁動勢Ff的空間夾角總是在60°~120°范圍內周期性變化,平均值為90°,這樣保證了定、轉子磁動勢Fa、Ff相互作用得到的是平均最大電磁轉矩T,強力拖動永磁轉子連續旋轉。
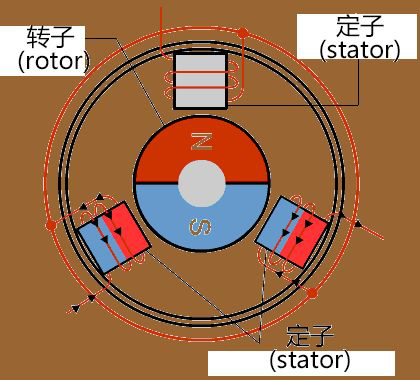
無刷直流電機的工作原理與有刷直流電機相似。洛倫茲力定律指出,只要載流導體置于磁場中,它就會受到作用力。由于反作用力,磁體將承受相等且相反的力。當線圈中通過電流后,會產生磁場,該磁場被定子的磁極所驅動,同極性相互排斥,異極性相互吸引,如果持續改變線圈中電流的方向的話,那么轉子所感應出磁場的磁極也會持續發生變化,那么轉子就會在磁場的作用下一直轉動。
在BLDC電機中,永磁體(轉子)是運動的,而載流導體(定子)是固定的。 ? ?
BLDC電機運轉示意圖
當定子線圈從電源獲得電源時,它就變成電磁體并開始在氣隙中產生均勻的磁場。盡管電源是直流電,但開關仍會產生具有梯形形狀的交流電壓波形。由于電磁定子和永磁轉子之間的相互作用力,轉子繼續旋轉。
通過將繞組切換為高和低信號,相應的繞組被激勵為北極和南極。帶有南極和北極的永磁轉子與定子極對齊,從而導致電機旋轉。
一對極和兩對極的BLDC電機運行動圖 ? ?
無刷直流電機有三種配置:單相,兩相和三相。其中,三相BLDC是最常見的一種。
(3)無刷直流電機的驅動方法
無刷直機電機的驅動方式按不同類別可分多種驅動方式:
按驅動波形:方波驅動,這種驅動方式實現方便,易于實現電機無位置傳感器控制;
正弦驅動:這種驅動方式可以改善電機運行效果,使輸出力矩均勻,但實現過程相對復雜。同時,這種方法又有SPWM和SVPWM(空間矢量PWM)兩種方式,SVPWM的效果好于SPWM。
(4)無刷直流電機的優點與不足:
優點:
?高輸出功率
?小尺寸和重量
?散熱性好、效率高
?運行速度范圍寬
?低電噪聲
?高可靠性和低維護要求
?高動態響應
?電磁干擾少
不足:
控制該電機所需的電子控制器很昂貴
需要復雜的驅動電路
需要額外的位置傳感器(FOC不用)
(5)無刷直流電機的應用
無刷直流電機廣泛用于各種應用需求,例如工業控制(在紡織、冶金、印刷、自動化生產流水線、數控機床等工業生產方面,無刷直流電機都發揮重要的作用。),汽車(雨刷器、電動車門、汽車空調、電動車窗等部位都有電機的身影。),航空,自動化系統(在生活中常見的打印機、傳真機、復印機、硬盤驅動器、軟盤驅動器、電影攝影機等,在它們的主軸和附屬運動的帶動控制中,都有無刷直流電機的身影。),醫療保健設備(對無刷直流電機的使用已經較為普遍,可以用來驅動人工心臟中的小型血泵;在國內,手術用高速器具的高速離心機、熱像儀和測溫儀的紅外激光調制器都使用了無刷直流電機。)等領域中的各種負載,恒定負載和定位應用。 ? ?
無刷直流電機與有刷直流電機的區別:
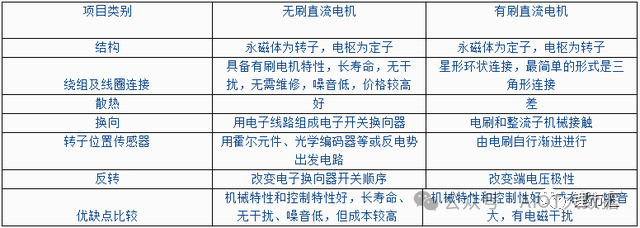
無刷直流電機與有刷直流電機的對比
全球BLDC電機主流制造商(Top10)
目前BLDC產業內,排名比較靠前的企業有ABB、阿美特克(AMTEK)、日本電產、美蓓亞集團、德昌電機、聯合運動技術公司、保德電子公司、北美電氣公司、施耐德電氣、及雷勃電氣(RegalBeloitCorporation)等。
直流無刷電機介紹
直流無刷電機(BLDC)是同步電機中的一種,即定子產生的磁場和轉子產生的磁場具有相同的頻率。其因具有高輸出功率、低電噪聲、高可靠性、高動態響應、電磁干擾少、更好的轉速-轉矩等優點,而被廣泛使用。 ? ?
直流無刷電機內部結構
直流無刷電機的結構圖如下圖所示(有槽、外轉子、無傳感器電機為例):
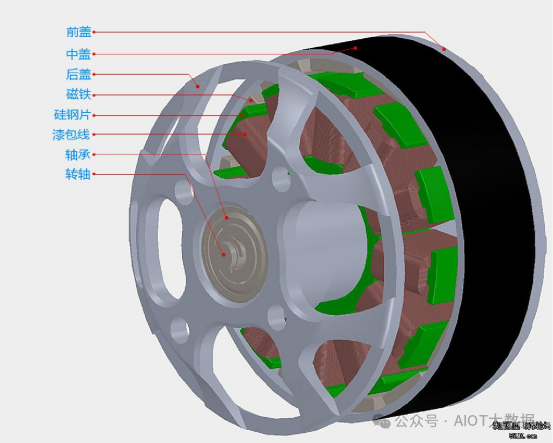
上圖無刷電機由前蓋、中蓋、磁鐵、硅鋼片、漆包線、軸承、轉軸以及后蓋組成。其中,磁鐵、軸承、轉軸組成電機的轉子;硅鋼片、漆包線組成電機的定子;前蓋、中蓋、后蓋組成電機的外殼。重要組成說明如下表所示:
?
?
| ? | 組成 | 描述 |
| 轉子 | 磁鐵 | 無刷電子的重要組成部分。無刷電機絕大部分性能參數都與其相關; ? ? ? ? |
| 轉軸 | 轉子的直接受力部分; | |
| 軸承 | 是電機運轉順暢的保證;目前大多數的無刷電機都是采用深溝球軸承; | |
| 定子 | 硅鋼片 | 是有槽無刷電機的重要組成部分,主要作用是降低磁阻、參與磁路運轉; |
| 漆包線 | 作為線圈繞組的通電導體;通過電流交變頻率和波形,在定子周圍形成磁場,驅動轉子轉動; |
?
?

轉子描述
直流無刷電機(BLDC)的轉子由永磁體制成,多對磁極按照N極和S極交替排列(涉及極對數參數)。
定子描述
直流無刷電機(BLDC)的定子由硅鋼片組成(如下圖),定子繞組置于沿內部軸軸向開鑿的槽中(涉及鐵芯極數(槽數N)參數)。每個定子繞組由許多線圈相互連接而成。常見的繞組分布呈三連接星型的方式。 ? ?
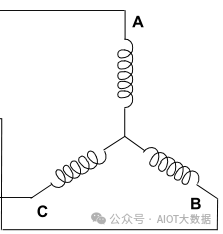
三連接星型繞組線圈,按照線圈連接的方式,可將定子繞組分為梯形、正弦波繞組。兩者的區別主要是產生的反電動勢的波形。顧名思義:梯形定子繞組產生梯形的反電動勢,正弦波繞組產生正弦波的反電動勢。如下圖所示: ? ?
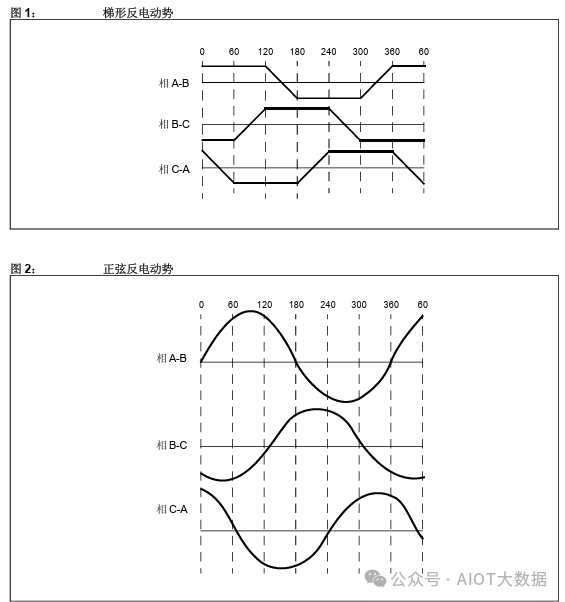
PS:電機無負載供電時,通過示波器可測出波形.
02直流無刷電機分類
直流無刷電機分類描述
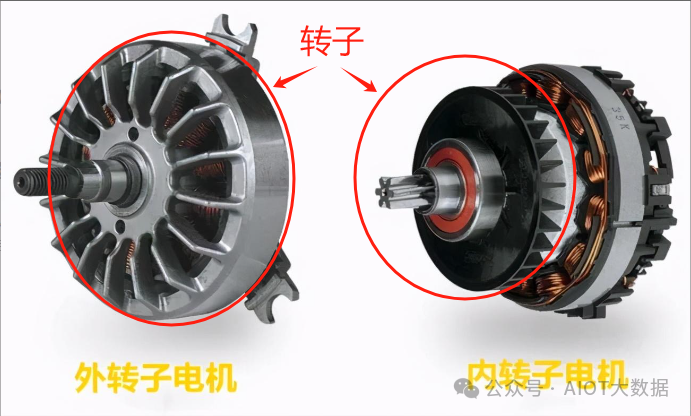
直流無刷電機(BLDC)按照轉子分布可分為內轉子電機、外轉子電機;按照驅動相可分為單相電機、兩相電機、三相電機(使用最普遍);按照是否裝有傳感器分為有感電機和無感電機等等;對于電機的分類有很多,篇幅原因,這里不作過來描述,感興趣的兄弟可自行了解。
內、外轉子電機描述
無刷電機根據轉子和定子的排位結構,可分為外轉子電機和內轉子電機兩種(如下圖)。 ? ?
?
?
| 電機 | 描述 |
| 外轉子電機 | 內部通電線圈繞組作為定子,永磁體與外殼聯動為轉子;通俗來說:轉子在外、定子在內; |
| 內轉子電機 | 內部永磁體與轉軸聯動為轉子,通電線圈繞組與外殼作為定子。通俗來說:轉子在內、定子在外; |
?
?
內、外轉子電機區別
內、外轉子電機除了轉子和定子排序不一樣外,還有如下的區別:
?
?
| 特性 | 內轉子電機 | 外轉子電機 |
| 功率密度 ? ? ? ? | 更高 | 較低 |
| 轉速 | 更高 | 較低 |
| 穩定性 | 較低 | 更高 |
| 成本 | 相對更高 | 相對更低 |
| 散熱性 | 較差 | 更好 |
| 極對數 | 更少 | 更多 |
?
?
03直流無刷電機參數
無刷電機參數
?
?
| 參數 | 描述 |
| 額定電壓 | 對于無刷電機而言,其適合的工作電壓非常廣,此參數是指定負載條件下的工作電壓. |
| KV值 |
物理意義:1V工作電壓下每分鐘的轉速,即: 轉速(空載)=KV值*工作電壓; ? ? ? ? 對于尺寸規格的無刷電機而言: 1.繞線匝數多,KV值低,最高輸出電流小,扭力大; 2.繞線匝數少,KV值高,最高輸出電流大,扭力小; |
| 轉矩和轉速 |
轉矩(力矩、扭矩): 電機中轉子產生的可以用來帶動機械負載的驅動力矩; 轉速: 電機每分鐘的轉速; |
| 最大電流 | 能夠承受并安全工作的最大電流 |
| 槽極結構 |
鐵芯極數(槽數N): 定子硅鋼片的槽數量; 磁鋼極數(極數P): 轉子上磁鋼的數量; |
| 定子電感 | 電動機靜止時的定子繞組兩端的電感 |
| 定子電阻 | 在20℃下電動機每相繞組的直流電阻 |
| 反電動勢系數 | 在規定條件下,電動機繞組開路時,單位轉速在電樞繞組中所產生的線感應電動勢值 |
?
?
BLDC電機控制 ? ?
BLDC電機控制算法
無刷電機屬于自換流型(自我方向轉換),因此控制起來更加復雜。
BLDC電機控制要求了解電機進行整流轉向的轉子位置和機制。對于閉環速度控制,有兩個附加要求,即對于轉子速度/或電機電流以及PWM信號進行測量,以控制電機速度功率。
BLDC電機可以根據應用要求采用邊排列或中心排列PWM信號。大多數應用僅要求速度變化操作,將采用6個獨立的邊排列PWM信號。這就提供了最高的分辨率。如果應用要求服務器定位、能耗制動或動力倒轉,推薦使用補充的中心排列PWM信號。
為了感應轉子位置,BLDC電機采用霍爾效應傳感器來提供絕對定位感應。這就導致了更多線的使用和更高的成本。無傳感器BLDC控制省去了對于霍爾傳感器的需要,而是采用電機的反電動勢(電動勢)來預測轉子位置。無傳感器控制對于像風扇和泵這樣的低成本變速應用至關重要。在采有BLDC電機時,冰箱和空調壓縮機也需要無傳感器控制。 ? ?
空載時間的插入和補充
大多數BLDC電機不需要互補的PWM、空載時間插入或空載時間補償。可能會要求這些特性的BLDC應用僅為高性能BLDC伺服電動機、正弦波激勵式BLDC電機、無刷AC、或PC同步電機。
控制算法
許多不同的控制算法都被用以提供對于BLDC電機的控制。典型地,將功率晶體管用作線性穩壓器來控制電機電壓。當驅動高功率電機時,這種方法并不實用。高功率電機必須采用PWM控制,并要求一個微控制器來提供起動和控制功能。
控制算法必須提供下列三項功能:
用于控制電機速度的PWM電壓
用于對電機進整流換向的機制
利用反電動勢或霍爾傳感器來預測轉子位置的方法
脈沖寬度調制僅用于將可變電壓應用到電機繞組。有效電壓與PWM占空度成正比。當得到適當的整流換向時,BLDC的扭矩速度特性與以下直流電機相同。可以用可變電壓來控制電機的速度和可變轉矩。 ? ?
功率晶體管的換向實現了定子中的適當繞組,可根據轉子位置生成最佳的轉矩。在一個BLDC電機中,MCU必須知道轉子的位置并能夠在恰當的時間進行整流換向。
BLDC電機的梯形整流換向
對于直流無刷電機的最簡單的方法之一是采用所謂的梯形整流換向。
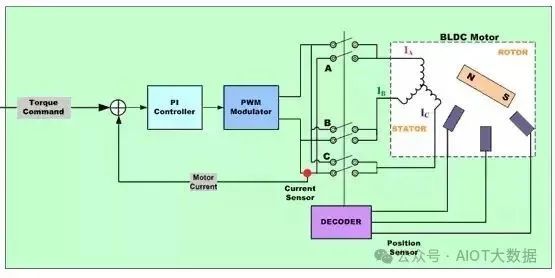
用于BLDC電機的梯形控制器的簡化框圖
在這個原理圖中,每一次要通過一對電機終端來控制電流,而第三個電機終端總是與電源電子性斷開。 ? ?
嵌入大電機中的三種霍爾器件用于提供數字信號,它們在60度的扇形區內測量轉子位置,并在電機控制器上提供這些信息。由于每次兩個繞組上的電流量相等,而第三個繞組上的電流為零,這種方法僅能產生具有六個方向共中之一的電流空間矢量。隨著電機的轉向,電機終端的電流在每轉60度時,電開關一次(整流換向),因此電流空間矢量總是在90度相移的最接近30度的位置。
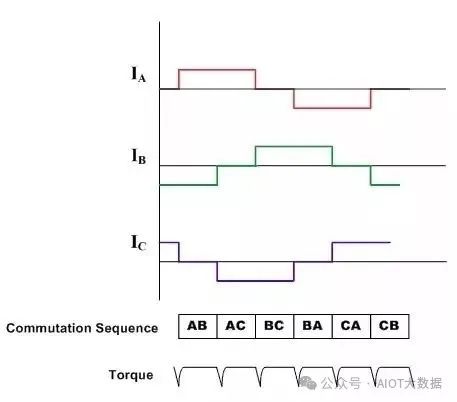
梯形控制:驅動波形和整流處的轉矩
因此每個繞組的電流波型為梯形,從零開始到正電流再到零然后再到負電流。這就產生了電流空間矢量,當它隨著轉子的旋轉在6個不同的方向上進行步升時,它將接近平衡旋轉。
在像空調和冰箱這樣的電機應用中,采用霍爾傳感器并不是一個不變的選擇。在非聯繞組中感應的反電動勢傳感器可以用來取得相同的結果。
這種梯形驅動系統因其控制電路的簡易性而非常普通,但是它們在整流過程中卻要遭遇轉矩紋波問題。 ? ?
BLDC電機的正弦整流換向
梯形整流換向還不足以為提供平衡、精準的無刷直流電機控制。這主要是因為在一個三相無刷電機(帶有一個正統波反電動勢)中所產生的轉矩由下列等式來定義:
轉軸轉矩=Kt[IRSin(o)+ISSin(o+120)+ITSin(o+240)]
其中:o為轉軸的電角度Kt為電機的轉矩常數IR,IS和IT為相位電流如果相位電流是正弦的:IR=I0Sino;IS=I0Sin(+120o);IT=I0Sin(+240o)
將得到:轉軸轉矩=1.5I0*Kt(一個獨立于轉軸角度的常數)
正弦整流換向無刷電機控制器努力驅動三個電機繞組,其三路電流隨著電機轉動而平穩的進行正弦變化。選擇這些電流的相關相位,這樣它們將會產生平穩的轉子電流空間矢量,方向是與轉子正交的方向,并具有不變量。這就消除了與北形轉向相關的轉矩紋波和轉向脈沖。
為了隨著電機的旋轉,生成電機電流的平穩的正弦波調制,就要求對于轉子位置有一個精確有測量。霍爾器件僅提供了對于轉子位置的粗略計算,還不足以達到目的要求。基于這個原因,就要求從編碼器或相似器件發出角反饋。
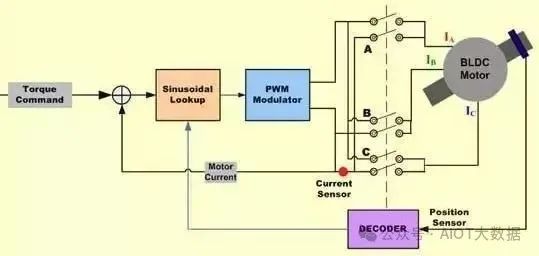
BLDC電機正弦波控制器的簡化框圖
由于繞組電流必須結合產生一個平穩的常量轉子電流空間矢量,而且定子繞組的每個定位相距120度角,因此每個線組的電流必須是正弦的而且相移為120度。采用編碼器中的位置信息來對兩個正弦波進行合成,兩個間的相移為120度。然后,將這些信號乘以轉矩命令,因此正弦波的振幅與所需要的轉矩成正比。結果,兩個正弦波電流命令得到恰當的定相,從而在正交方向產生轉動定子電流空間矢量。 ? ?
正弦電流命令信號輸出一對在兩個適當的電機繞組中調制電流的P-I控制器。第三個轉子繞組中的電流是受控繞組電流的負和,因此不能被分別控制。每個P-I控制器的輸出被送到一個PWM調制器,然后送到輸出橋和兩個電機終端。應用到第三個電機終端的電壓源于應用到前兩個線組的信號的負數和,適當用于分別間隔120度的三個正弦電壓。
結果,實際輸出電流波型精確的跟蹤正弦電流命令信號,所得電流空間矢量平穩轉動,在量上得以穩定并以所需的方向定位。
一般通過梯形整流轉向,不能達到穩定控制的正弦整流轉向結果。然而,由于其在低電機速度下效率很高,在高電機速度下將會分開。這是由于速度提高,電流回流控制器必須跟蹤一個增加頻率的正弦信號。同時,它們必須克服隨著速度提高在振幅和頻率下增加的電機的反電動勢。
由于P-I控制器具有有限增益和頻率響應,對于電流控制回路的時間變量干擾將引起相位滯后和電機電流中的增益誤差,速度越高,誤差越大。這將干擾電流空間矢量相對于轉子的方向,從而引起與正交方向產生位移。
當產生這種情況時,通過一定量的電流可以產生較小的轉矩,因此需要更多的電流來保持轉矩。效率降低。
隨著速度的增加,這種降低將會延續。在某種程度上,電流的相位位移超過90度。當產生這種情況時,轉矩減至為零。通過正弦的結合,上面這點的速度導致了負轉矩,因此也就無法實現。 ? ?
AC電機控制算法
標量控制
標量控制(或V/Hz控制)是一個控制指令電機速度的簡單方法
指令電機的穩態模型主要用于獲得技術,因此瞬態性能是不可能實現的。系統不具有電流回路。為了控制電機,三相電源只有在振幅和頻率上變化。
矢量控制或磁場定向控制
在電動機中的轉矩隨著定子和轉子磁場的功能而變化,并且當兩個磁場互相正交時達到峰值。在基于標量的控制中,兩個磁場間的角度顯著變化。
矢量控制設法在AC電機中再次創造正交關系。為了控制轉矩,各自從產生磁通量中生成電流,以實現DC機器的響應性。
一個AC指令電機的矢量控制與一個單獨的勵磁DC電機控制相似。在一個DC電機中,由勵磁電流IF所產生的磁場能量ΦF與由電樞電流IA所產生的電樞磁通ΦA正交。這些磁場都經過去耦并且相互間很穩定。因此,當電樞電流受控以控制轉矩時,磁場能量仍保持不受影響,并實現了更快的瞬態響應。
三相AC電機的磁場定向控制(FOC)包括模仿DC電機的操作。所有受控變量都通過數學變換,被轉換到DC而非AC。其目標的獨立的控制轉矩和磁通。
磁場定向控制(FOC)有兩種方法:直接FOC:轉子磁場的方向(Rotorfluxangle)是通過磁通觀測器直接計算得到的間接FOC:轉子磁場的方向(Rotorfluxangle)是通過對轉子速度和滑差(slip)的估算或測量而間接獲得的。
矢量控制要求了解轉子磁通的位置,并可以運用終端電流和電壓(采用AC感應電機的動態模型)的知識,通過高級算法來計算。然而從實現的角度看,對于計算資源的需求是至關重要的。 ? ?
可以采用不同的方式來實現矢量控制算法。前饋技術、模型估算和自適應控制技術都可用于增強響應和穩定性。
AC電機的矢量控制:深入了解
矢量控制算法的核心是兩個重要的轉換:Clark轉換,Park轉換和它們的逆運算。采用Clark和Park轉換,帶來可以控制到轉子區域的轉子電流。這種做充許一個轉子控制系統決定應供應到轉子的電壓,以使動態變化負載下的轉矩最大化。
Clark轉換:Clark數學轉換將一個三相系統修改成兩個坐標系統:
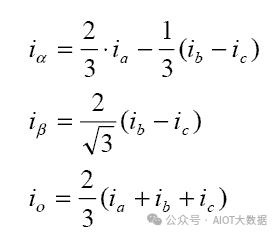
其中Ia和Ib正交基準面的組成部分,Io是不重要的homoplanar部分 ? ?
三相轉子電流與轉動參考系的關系
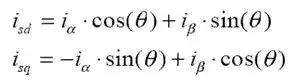
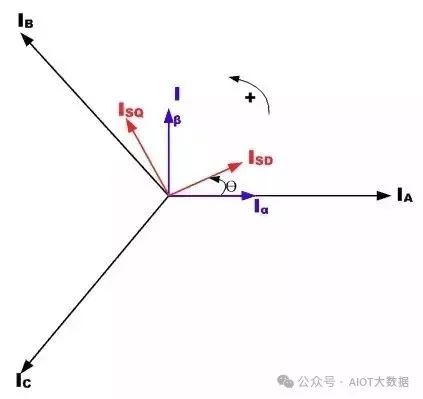
Park轉換:Park數學轉換將雙向靜態系統轉換成轉動系統矢量
兩相α,β幀表示通過Clarke轉換進行計算,然后輸入到矢量轉動模塊,它在這里轉動角θ,以符合附著于轉子能量的d,q幀。根據上述公式,實現了角度θ的轉換。
AC電機的磁場定向矢量控制的基本結構
Clarke變換采用三相電流IA,IB以及IC,這兩個在固定座標定子相中的電流被變換成Isd和Isq,成為Park變換d,q中的元素。其通過電機通量模型來計算的電流Isd,Isq以及瞬時流量角θ被用來計算交流感應電機的電動扭矩。 ? ?
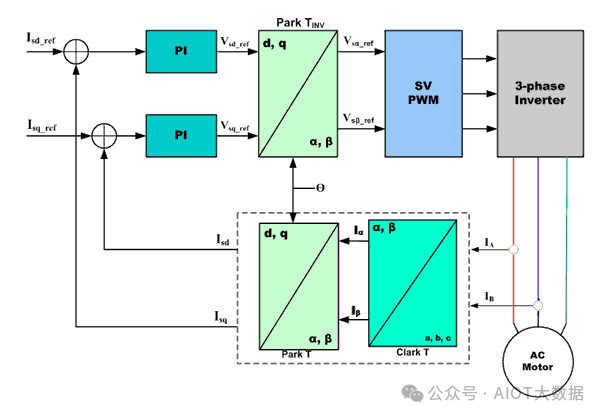
矢量控制交流電機的基本原理
這些導出值與參考值相互比較,并由PI控制器更新。

基于矢量的電機控制的一個固有優勢是,可以采用同一原理,選擇適合的數學模型去分別控制各種類型的AC,PM-AC或者BLDC電機。
BLDC電機的矢量控制 ? ?
BLDC電機是磁場定向矢量控制的主要選擇。采用了FOC的無刷電機可以獲得更高的效率,最高效率可以達到95%,并且對電機在高速時也十分有效率。
步進電機控制
步進電機控制通常采用雙向驅動電流,其電機步進由按順序切換繞組來實現。通常這種步進電機有3個驅動順序:
1.單相全步進驅動:
在這種模式中,其繞組按如下順序加電,AB/CD/BA/DC(BA表示繞組AB的加電是反方向進行的)。這一順序被稱為單相全步進模式,或者波驅動模式。在任何一個時間,只有一相加電。
2.雙相全步進驅動:
在這種模式中,雙相一起加電,因此,轉子總是在兩個極之間。此模式被稱為雙相全步進,這一模式是兩極電機的常態驅動順序,可輸出的扭矩最大。
3.半步進模式:
這種模式將單相步進和雙相步進結合在一起加電:單相加電,然后雙相加電,然后單相加電…,因此,電機以半步進增量運轉。這一模式被稱為半步進模式,其電機每個勵磁的有效步距角減少了一半,其輸出的扭矩也較低。 ? ?
以上3種模式均可用于反方向轉動(逆時針方向),如果順序相反則不行。
通常,步進電機具有多極,以便減小步距角,但是,繞組的數量和驅動順序是不變的。
通用DC電機控制算法
通用電機的速度控制,特別是采用2種電路的電機:相角控制PWM斬波控制
相角控制
相角控制是通用電機速度控制的最簡單的方法。通過TRIAC的點弧角的變動來控制速度。相角控制是非常經濟的解決方案,但是,效率不太高,易于電磁干擾(EMI)。
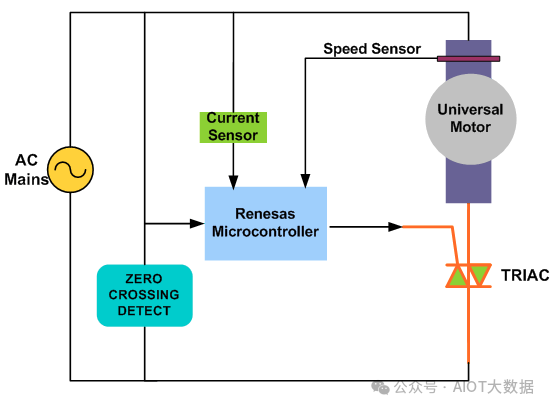
通用電機的相角控制
以上示圖表明了相角控制的機理,是TRIAC速度控制的典型應用。TRIAC門脈沖的周相移動產生了有效率的電壓,從而產生了不同的電機速度,并且采用了過零交叉檢測電路,建立了時序參考,以延遲門脈沖。 ? ?
PWM斬波控制
PWM控制是通用電機速度控制的,更先進的解決方案。在這一解決方案中,功率MOFSET,或者IGBT接通高頻整流AC線電壓,進而為電機產生隨時間變化的電壓。
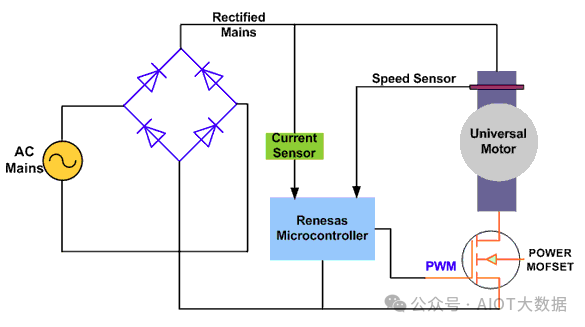
通用電機的PWM斬波控制
其開關頻率范圍一般為10-20KHz,以消除噪聲。這一通用電機的控制方法可以獲得更佳的電流控制和更佳的EMI性能,因此,效率更高。 ? ?
審核編輯:黃飛
















 工商網監
工商網監
評論