 電子發(fā)燒友App
電子發(fā)燒友App


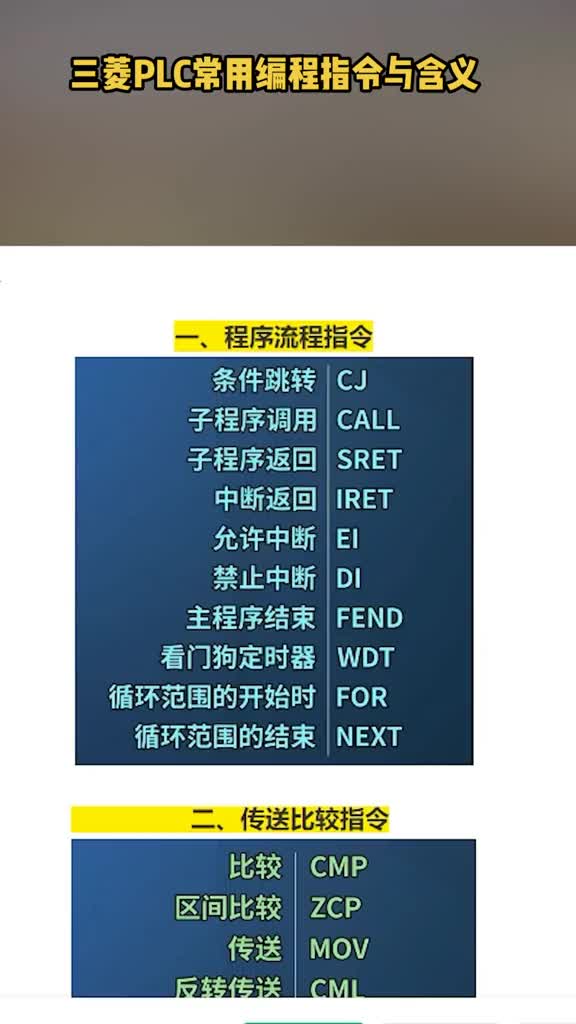
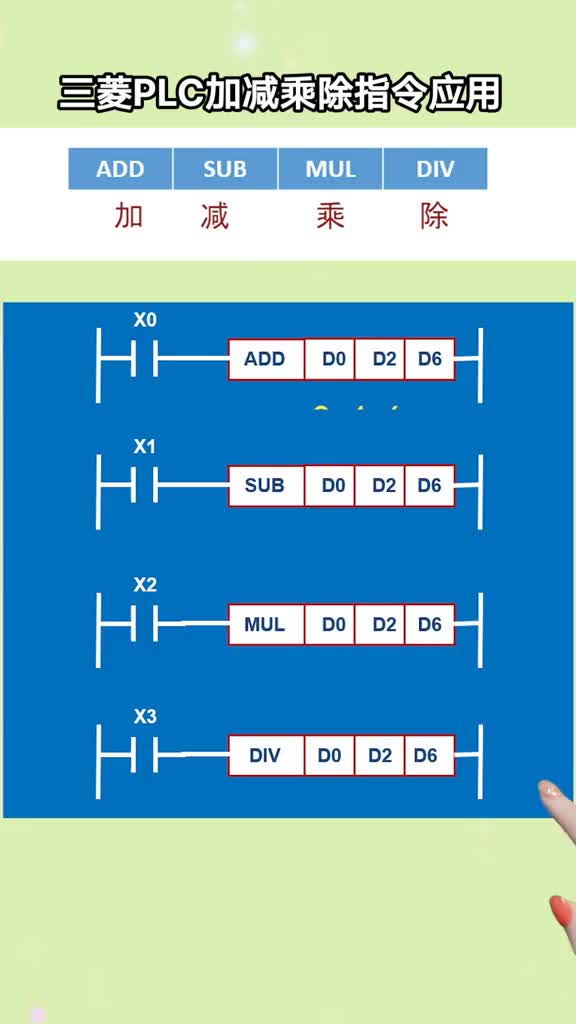
(D)CMP(P) 比較-------將兩源操作元件的數(shù)據(jù)作代數(shù)比較,結(jié)果送到目標(biāo)元件中,決定目標(biāo)元件的狀態(tài)。
源操作元件:K/H KnX KnY KnM KnS T C D V/Z
目標(biāo)元件:Y M S
格式:LD X0
CMP(P) K100 C20 M0
X0由OFF到ON 時: 當(dāng)K100》C20當(dāng)前值時,M0=1
當(dāng)K100=C20當(dāng)前值時,M1=1
當(dāng)K100《C20當(dāng)前值時,M2=1
當(dāng)用連續(xù)方式執(zhí)行CMP時,條件滿足時,每個掃描周期執(zhí)行一次。
(D)ZMP(P) 區(qū)間比較--------將一個數(shù)據(jù)與兩個源元件的數(shù)據(jù)區(qū)間作比較,結(jié)果送到目標(biāo)元件中,決定目標(biāo)元件的狀態(tài)。
源操作元件:K/H KnX KnY KnM KnS T C D V/Z
目標(biāo)元件:Y M S
格式:LD X0
ZCP(P) K100 K120 C30 M3
X0由OFF到ON時: 當(dāng)K100》C30當(dāng)前值時,M3=1
當(dāng)K100≤C30≥K120時,M4=1
當(dāng)K120《C30當(dāng)前值時,M5=1
當(dāng)用連續(xù)方式執(zhí)行ZCP時,條件滿足時,每個掃描周期執(zhí)行一次。
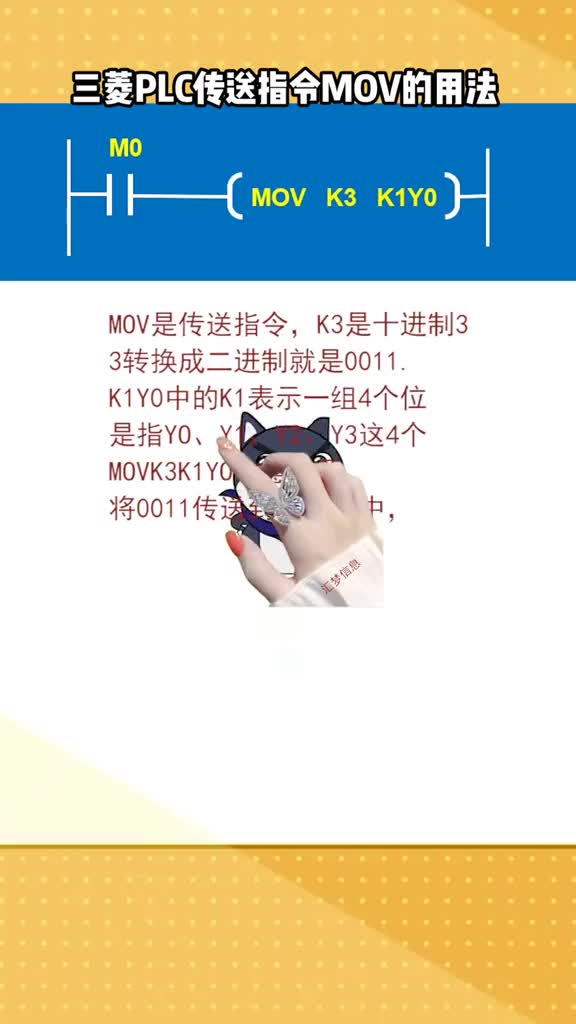
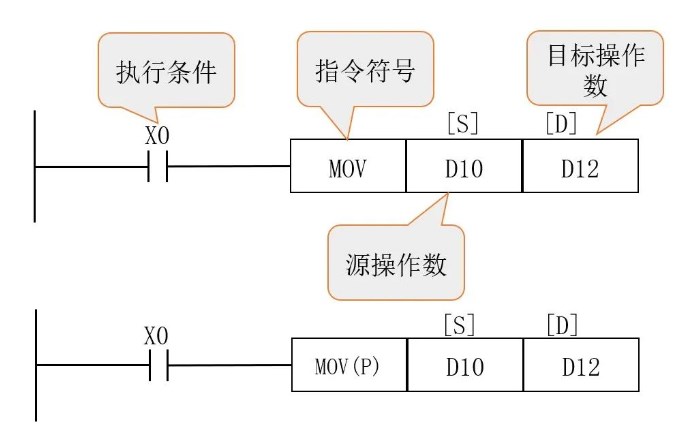
(D)MOV(P)傳送--------- 將操作元件的數(shù)據(jù)傳送到目標(biāo)元件中。
源操作元件:K/H KnX KnY KnM KnS T C D V/Z
目標(biāo)元件:KnY KnM KnS T C D V/Z
格式:LD X0
MOV(P) K100 D10
當(dāng)X0由OFF到ON時,將100 傳送到D10中
當(dāng)用連續(xù)方式執(zhí)行MOV時,條件滿足時,每個掃描周期執(zhí)行一次。
對于32位數(shù)據(jù)用DMOV 傳送,用元件號相臨的兩元件組成元件對。元件對的首位用奇數(shù)、偶數(shù)均可,但為避免出錯,元件對的首位建議統(tǒng)一用偶數(shù)。
當(dāng)傳送指令執(zhí)行時,常數(shù)自動轉(zhuǎn)化成二進(jìn)制數(shù)存入目標(biāo)元件。
SMOV(P)移位傳送--------將源元件的數(shù)據(jù)轉(zhuǎn)化為BCD碼,然后將BCD碼根據(jù)要求移位后,傳送到目標(biāo)元件中。
源操作元件:K/H KnX KnY KnM KnS T C D V/Z
目標(biāo)元件:KnY KnM KnS T C D V/Z
m:K H K/H的取值范圍:1—4,即D1的值不可超過9999
n:K H
使用格式:如D1=1685 D2=0
LD X0
SMOV(P) D1 K4 K2 D2 K3
當(dāng)X0由OFF到ON時:將D1=1685轉(zhuǎn)化為BCD 碼為0001 0110 1000 0101
D2=0 轉(zhuǎn)化為BCD碼為 0000 0000 0000 0000
再將D1的BCD碼從右起第4位開始的向右2位,移到D2 中右起第3位開始向右的2位,1位和第4位不變。此時D2為 0000 0001 0110 000 ,D2=160
當(dāng)用連續(xù)方式執(zhí)行SMOV時,條件滿足時,每個掃描周期執(zhí)行一次。
(D)CML(P)取反傳送----------將源元件內(nèi)數(shù)據(jù)轉(zhuǎn)化為二進(jìn)制數(shù)逐位取反(0→1 ,1→0),并傳送到指定目標(biāo)元件。
源操作元件:K/H KnX KnY KnM KnS T C D V/Z
目標(biāo)元件:KnY KnM KnS T C D V/Z
格式:如D0=11
LD X0
CML(P)D0 K1Y0
當(dāng)X0由OFF到ON時:先把D0= 11轉(zhuǎn)化為二進(jìn)制為 1 0 1 0, 然后取反為 0 1 0 1
則K1Y0的輸出為Y0=0,Y1=1,Y2=0,Y3=1
當(dāng)用連續(xù)方式執(zhí)行CML時,條件滿足時,每個掃描周期執(zhí)行一次。
與愛好者共享。
責(zé)任編輯:lq














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論