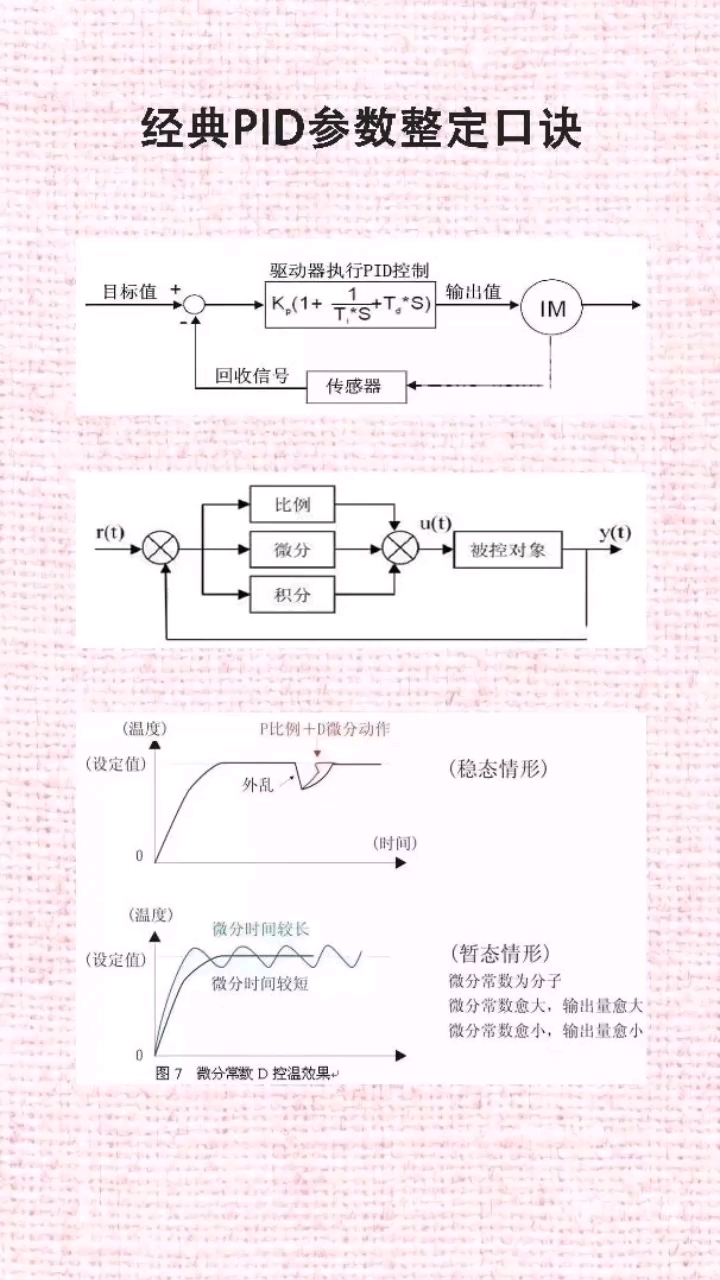
這是一首用經(jīng)驗法進行PID參數(shù)工程整定的口訣,該口訣流傳至今已有幾十年了,其最早出現(xiàn)在1973年11月出版的《化工自動化》一書中。現(xiàn)在網(wǎng)上流傳的口訣,看來大多是以該口訣作為藍本進行了補充和改編而來的。
2016-06-23 15:49:20 5490
5490 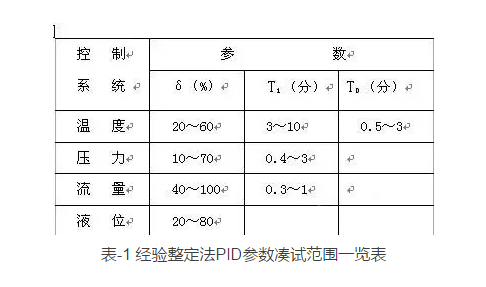
PID-PID控制器參數(shù)整定與實現(xiàn)
2020-05-12 11:30:36
轉(zhuǎn)載自中儀在線一、PID常用口訣::參數(shù)整定找最佳,從小到大順序查;先是比例后積分,最后再把微分加;曲線振蕩很頻繁,比例度盤要放大;曲線漂浮繞大灣,比例度盤往小扳;曲線偏離回復(fù)慢,積分時間往下
2017-12-21 14:18:13
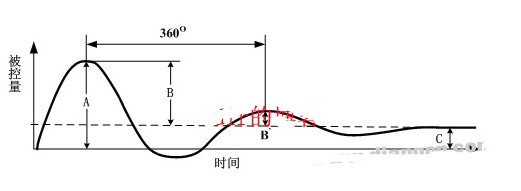
時Dout會有非常尖的尖峰,這時就要對delError進行限幅。在PID調(diào)節(jié)中,不允許出現(xiàn)很大的尖峰。 調(diào)好D后,NowVal會很好的跟隨TargetVal的變化而變化。 三、看圖整定參數(shù) 1-7
2020-06-23 14:54:44
;#defineNum_of_Results32/*typedef unsigned char uchar;typedef unsigned intuint;*//************************PID結(jié)構(gòu)
2016-07-27 16:56:43
PID參數(shù)設(shè)置指南電機控制很多都用到PID控制,那么PID控制怎么設(shè)置呢? 啟動PID參數(shù)自整定程序,可自動計算PID參數(shù),自整定成功率95%,少數(shù)自整定不成功的系統(tǒng)可按以下方法調(diào)PID參數(shù)。P
2016-02-01 18:08:45
PID參數(shù)的意義與整定方法資料
2015-07-31 09:17:31
設(shè)計PID控制器時,通過階躍響應(yīng)曲線法得到了被控對象的傳遞函數(shù)(為二階系統(tǒng)),請問PID參數(shù)如何計算?看了很多資料,都是有工程整定的方法調(diào)試出來的,那么什么是理論計算法?有知道的可以指點一下不
2017-08-12 16:38:35
本帖最后由 南中南 于 2016-1-6 18:24 編輯
看見網(wǎng)上有人整定了一個PID參數(shù)調(diào)節(jié)的順口溜,很是有趣又實用,發(fā)出來跟大家分享一下參數(shù)整定找最佳, 從小到大順序查。先是比例后積分
2016-01-06 17:58:56
本帖最后由 eehome 于 2013-1-5 10:08 編輯
PID常用口訣
2012-08-18 21:19:14
我做一個恒流源,但是有溫度漂移,想用PID控制。PID參數(shù)怎么整定啊
2013-01-16 17:50:11
PID控制的定義是什么?PID控制器參數(shù)整定的方法有哪些?
2021-09-28 08:00:16
口訣:參數(shù)整定找最佳,從小到大順序查,先是比例后積分,最后再把微分加,曲線振蕩很頻繁,比例度盤要放大,曲線漂浮繞大灣,比例度盤往小扳,曲線偏離回復(fù)慢,積分時間往下降,曲線波動周期長,積分時間再加
2016-09-23 10:23:04
希望對PID算法初學(xué)者有幫助
2014-11-02 20:22:25
是對誤差未來走向,相當(dāng)于有一定的提前量和預(yù)測性。會減小積分帶來的震蕩。使曲線輸出趨于平滑并等于設(shè)定值。 1.4、參數(shù)整定 參數(shù)整定就是對Kp\Ki\Kd進行配置。 第一種方法 調(diào)整比例其他參數(shù)=0 先
2018-07-06 05:40:53
PID溫度控制參數(shù)整定的方法是什么?
2021-11-22 06:13:41
/*PID的參數(shù)設(shè)置可以參照以下來進行: 參數(shù)整定找最佳,從小到大順序查; 先是比例后積分,最后再把微分加; 曲線振蕩很頻繁,比例度盤要放大; 曲線漂浮繞大灣,比例度盤往小扳; 曲線偏離
2021-09-06 09:20:22
怎么才能實現(xiàn)一個PID自整定
2023-10-12 07:46:15
在實際的控制系統(tǒng)中,線性系統(tǒng)畢竟是少數(shù),大部分的系統(tǒng)屬于非線性系統(tǒng),或者說是系統(tǒng)模型不確定的系統(tǒng),如果控制精度要求較高的話,那么對于參數(shù)的整定過程是有難度的。專家 PID 和模糊 PID 就是為滿足
2021-07-19 06:29:49
PID算法及參數(shù)自整定在溫控系統(tǒng)中的實現(xiàn)
2009-03-14 17:06:09
算法,如下圖所示。但是工程上,用增量式算法比較多,這樣可以避免積分環(huán)節(jié)飽和溢出的問題,具體公式和整定參數(shù)的口訣就不貼出來了,網(wǎng)上資料多如牛毛。下面看這樣的一
2021-09-13 06:06:20
這是一份很好的PID入門級資料,深入淺出,簡單易懂 。相信你們都見過那個 PID 整定口訣。不嫌麻煩,茲抄錄如下: 參數(shù)整定找最佳, 從小到大順序查。 先是比例后積分, 最后再把微分加。 曲線振蕩
2018-11-05 16:31:18
很好的PID入門級資料,簡單易懂 。相信你們都見過那個 PID 整定口訣。不嫌麻煩,茲抄錄如下: 參數(shù)整定找最佳, 從小到大順序查。 先是比例后積分, 最后再把微分加。 曲線振蕩很頻繁, 比例度盤要
2018-09-04 14:15:42
Arduino小車PID調(diào)速——整定參數(shù)初試水在實現(xiàn)了小車較為可靠的測速基礎(chǔ)上,便可以正式開展PID調(diào)速實驗了。本文是基于使用Arduino平臺上由Brett Beauregard大神寫的PID庫
2021-09-07 09:21:03
【Simulink】FOA優(yōu)化算法整定PID控制器參數(shù)(五)—— 一階帶時延的被控對象目錄【Simulink】FOA優(yōu)化算法整定PID控制器參數(shù)(五)—— 一階帶時延的被控對象0研究背景1研究背景2
2021-08-30 06:46:44
Matlab PID控制資料.rar基于MATLAB下的PID控制仿真.pdf基于MATLAB的PID控制器設(shè)計.pdf基于MATLAB的PID控制器參數(shù)整定及仿真.pdf基于MATLAB/Simulink環(huán)境下的PID參數(shù)整定.pdf
2011-07-07 09:30:13
在matlab6.5中simulink的PID參數(shù)整定模塊是NCD Outport,在matlab7.5版本的是singal constraint模塊,在matlab2010中相應(yīng)模塊是哪個?拜托啦。急用!
2012-04-28 16:53:14
PID控制及整定算法
2021-08-11 15:35:37
SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定[hide][/hide]
2017-03-14 15:14:23
如何去實現(xiàn)STM32電機的PID參數(shù)整定?如何去編寫STM32電機的PID參數(shù)整定的代碼?
2021-09-23 08:07:13
自己在做四旋翼,軸間距450,現(xiàn)在剛開始調(diào)內(nèi)環(huán)PID,在網(wǎng)上也看了一些別人的經(jīng)驗,但是自己一上手,就感覺到有一點迷茫,想問一下有沒有這方面經(jīng)驗的,能不能分享一下,內(nèi)環(huán)PID參數(shù)整定,大概要達到什么樣的效果,才能再進行外環(huán)PID整定。
2019-07-04 04:35:52
labview pid參數(shù)整定,純比例度調(diào)節(jié)時,I設(shè)為多大?書上說應(yīng)該設(shè)定為無限大,但是這樣設(shè)置,輸出幾乎無變化。
2014-05-14 15:43:03
各位大神,串級PID整定先后?發(fā)散振蕩該如何整定?
2017-05-14 10:15:36
PID算法,來進行電機的速度控制,并進行實驗測試。推薦理由:詳細講解了PID基礎(chǔ)、算法分類、各項作用,PID參數(shù)整定口訣,電機PID速度控制程序與算法實現(xiàn),通過野火PID調(diào)試助手軟件,實驗演示PID調(diào)試
2022-04-08 14:53:57
【實驗】SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定[hide][/hide]
2017-03-05 10:54:11
整定自控系統(tǒng)很多人會想到自控系統(tǒng)PID參數(shù)整定,云南昌暉儀表制造有限公司與大家分享自控系統(tǒng)現(xiàn)場調(diào)試干貨:整定自控系統(tǒng)除PID參數(shù)整定外,還應(yīng)注意執(zhí)行機構(gòu)動作次數(shù)、PID死區(qū)、系統(tǒng)調(diào)節(jié)裕度、調(diào)節(jié)閥通流
2018-02-26 21:45:15
本文主要介紹PID參數(shù)的作用原理,參數(shù)整定的經(jīng)典計算方法,通過看曲線整定PID參數(shù)的方法,串級控制、純滯后對象。回復(fù)帖子查看資料下載鏈接:[hide][/hide]
2021-08-05 10:10:47
在使用伺服驅(qū)動器過程中,我們都需要進行驅(qū)動器的調(diào)試。其中最關(guān)鍵的參數(shù)調(diào)試莫過于PID參數(shù)整定了。很多小白在這方面往往經(jīng)驗欠缺,不知從何入手,這里介紹一下PID參數(shù)的基本調(diào)試方法,幫助大家快速掌握入門
2021-09-17 09:34:29
從新手到高手 自動調(diào)節(jié)系統(tǒng)解析與PID整定
2018-02-23 17:32:56
伺服電機控制器為何要整定?何時需要整定?
2021-09-29 06:11:22
分組成:電流環(huán)、速度環(huán)、位置環(huán) 對于伺服電機使用者來說,只需要整定速度環(huán)和位置環(huán)參數(shù)。除選擇電機功率型號外,電流環(huán)不需要任何用戶交互,它被設(shè)定為1.8KHz的固定帶寬。如果電機功率型號選錯,電流環(huán)的工作
2018-11-01 11:14:10
一直以來,關(guān)于PID整定都在進行手動調(diào)試,例如試湊法、1/4衰減曲線法、齊格勒-尼柯爾斯整定法等; 雖然上述方法都可以完成對參數(shù)的整定,但是需要非常豐富的調(diào)試經(jīng)驗才能達到預(yù)期的目的。同時,當(dāng)需要控制
2021-08-31 08:41:30
作者:唐國豐在我的上一篇文章《低壓系統(tǒng)第一個斷路器的參數(shù)設(shè)計》中探討的是斷路器的極限分斷能力的選型和接地故障保護電流的計算,后來在其它刊物發(fā)表這篇文章的時候,我將文章的名稱改為《數(shù)據(jù)中心斷路器整定值
2021-09-14 06:55:36
這種情況是怎么回事;求教下相關(guān)PID參數(shù)整定方法,涉及到溫度控制方面的。另外通過Autotunning PID參數(shù)調(diào)出PID整定向?qū)В?b class="flag-6" style="color: red">整定出來的參數(shù)在控制過程中,效果也不太好。
2015-05-05 16:20:33
PID參數(shù)整定有什么作用?分享一些基于直流電機調(diào)速平臺的PID參數(shù)整定經(jīng)驗
2021-06-30 06:42:04
給四軸調(diào)了好久的PID,總算是調(diào)好了,現(xiàn)分享PID參數(shù)整定的心得給大家,還請大家噴的時候手下留情。首先說明一下,這篇文章的主旨并不是直接教你怎么調(diào),而是告訴你這么調(diào)有什么道理,還要告訴大家為什么‘只
2018-07-30 14:16:59
(FIS Toolbox)與LabVIEW虛擬儀器開發(fā)軟件集成,研制出模糊參數(shù)自整定PID虛擬控制器,并實現(xiàn)了對非線性系統(tǒng)的實時測控。2 Fuzzy-PID控制策略 模糊參數(shù)自整定PID控制器以系統(tǒng)
2019-04-17 09:40:02
我用protues作為仿真軟件,用溫度傳感器DS18B20測量溫度。Protues中溫度傳感器沒有測溫,是通過模擬自己手動升溫與降溫看輸出I/O口的高低電平看模擬效果。這里我無法得到實時溫度曲線,那么要怎么整定PID參數(shù)呢?
2017-05-06 15:20:40
源:增量式PID的stm32實現(xiàn),整定過程 首先說說增量式PID的公式,這個關(guān)系到MCU算法公式的書寫,實際上兩個公式的寫法是同一個公式變換來得,不同的是系數(shù)的差異。 資料上比較多的是: 還有一種
2021-09-13 07:35:35
如何推定驅(qū)動器的慣量比?如何根據(jù)驅(qū)動器的波形圖來整定參數(shù)減小誤差呢?
2021-10-08 06:35:49
論上可以證明,對于過程控制的典型對象──“一階滯后+純滯后”與“二階滯后+純滯后”的控制對象,PID控制器是一種最優(yōu)控制。PID調(diào)節(jié)規(guī)律是連續(xù)系統(tǒng)動態(tài)品質(zhì)校正的一種有效方法,它的參數(shù)整定方式簡便,結(jié)構(gòu)
2019-05-30 10:23:04
)PID參數(shù)調(diào)整口訣:參數(shù)整定找最佳,從小到大順序查;先是比例后積分,最后再把微分加;曲線振蕩很頻繁,比例度盤要放大;曲線漂浮繞大灣,比例度盤往小扳;曲線偏離回復(fù)慢,積分時間往下降;曲線波動周期長,積分
2019-05-30 08:30:00
PID調(diào)節(jié)器參數(shù)整定方法很多,常見的工程整定方法有臨界比例度法、衰減曲線法和經(jīng)驗法。本帖以圖文形式分別介紹調(diào)節(jié)器參數(shù)整定方法。調(diào)節(jié)器參數(shù) yunrun.com.cn/tech/440.html臨界
2017-12-26 21:40:51
通常是用什么算法實現(xiàn)自整定的
2023-10-23 06:08:41
怎樣去整定PID的參數(shù)呢?PID參數(shù)的整定方法有哪幾種?有哪位大神遇到過這個問題
2021-07-06 06:01:03
運用在電機控制、開關(guān)電源、電源管理芯片等領(lǐng)域。一般《自動控制原理》上給的是位置式算法,如下圖所示。但是工程上,用增量式算法比較多,這樣可以避免積分環(huán)節(jié)飽和溢出的問題,具體公式和整定參數(shù)的口訣就不貼出來
2021-09-13 06:20:07
,那么它在超出目標(biāo)液位時對超調(diào)的抑制也就越明顯。這里,我想再強調(diào)的是:PID參數(shù)整定的結(jié)論是根據(jù)普遍經(jīng)驗總結(jié)的,但是針對某個具體的系統(tǒng)不一定完全適用。6) 在上面的系統(tǒng)中,我們假設(shè)用戶用水的固定的一個值
2016-01-08 15:02:15
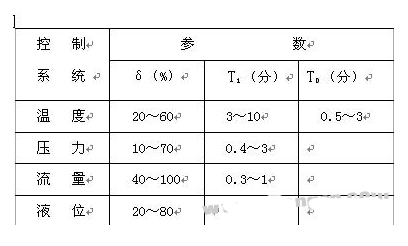
得到滿意的控制參數(shù)。為便于記憶和操作,儀表師傅們將這些經(jīng)驗總結(jié)為一個PID參數(shù)整定口訣,即: 參數(shù)整定找最佳,從小到大順序查 先是比例后積分,最后再把微分加 曲線振蕩很頻繁,比例度盤要放大 曲線漂浮繞
2017-11-14 09:06:47
有功阻尼整定PI參數(shù):定義的有功阻尼為:聯(lián)立轉(zhuǎn)矩方程和機械方程可以得到:導(dǎo)出有功阻尼系數(shù):與傳統(tǒng)PI調(diào)節(jié)器對比,PI的參數(shù)為電流環(huán)內(nèi)模PI控制:內(nèi)模控制就是選擇一個內(nèi)模控制器和內(nèi)模,假定內(nèi)模與電機
2021-08-27 07:54:40
小弟試過了用labview里的pid例程里的Plant作為被控對象,但是自整定不成功,求高手幫忙,謝謝
2012-04-25 09:19:52
淺談增量式PID參數(shù)整定https://bbs.elecfans.com/jishu_260252_1_1.html
2012-08-18 09:50:39
在實際使用電機驅(qū)動器控制電機的時候,PID的整定方法采用實驗中的試湊法,但是電機的響應(yīng)曲線怎么獲得?
2016-11-17 17:45:25
雙閉環(huán) 外環(huán)是速度環(huán)內(nèi)環(huán)是電流環(huán)在整定電流環(huán)PI參數(shù) 主要是通過示波器觀察什么怎么確定調(diào)節(jié)的參數(shù)可以用
2014-03-11 00:32:48
怎樣去推導(dǎo)電流環(huán)PI參數(shù)的整定公式?怎樣去推導(dǎo)轉(zhuǎn)速環(huán)PI參數(shù)的整定公式?
2021-10-08 09:38:08
最近,在進行直線電機標(biāo)準伺服算法的參數(shù)整定工作,標(biāo)準伺服算法中參數(shù)眾多,給整定工作帶來了不少的難度,參數(shù)與直線電機響應(yīng)之間的影響、參數(shù)與參數(shù)之間的相互影響等等,為了探究其中的規(guī)律,專門寫下此博客記錄
2021-09-03 06:15:22
及控制過程的曲線形狀,直接對控制系統(tǒng)反復(fù)地、逐漸地試湊,最終得到滿意的PID控制參數(shù)。為便于記憶和操作,儀表師傅們將這些經(jīng)驗總結(jié)為一個口訣,即: 參數(shù)整定找最佳,從小到大順序查先是比例后積分,最后再把微分
2018-01-04 21:07:26
自動開關(guān)脫扣器整定電流選擇的口訣 1.用途根據(jù)電動機容量(千瓦)或變壓器容量(千伏安)直接決定脫扣器額定電流的大小(安)2.口訣:電動機瞬動,千瓦20 倍變壓器瞬動,千伏安3 倍熱脫扣器,按額定值
2011-04-22 17:09:09
自己整理的PID工程整定方法
2020-05-26 09:14:46
自己整理的PID資料,帶工程整定方法,很不錯
2014-07-28 16:44:04
小白一個,目前在IAR平臺利用ST-LINK在線整定一個電機的pid,電機自帶有編碼器,請教一個如何編一個程序,能將電機的速度和位置用曲線圖顯示出來,最好能夠?qū)崟r顯示。
2018-06-26 09:31:01
最近在研究PID整定,于是乎拿了51單片機配上ds18b20加熱電阻 控制加熱溫度,在論壇找到了關(guān)于pid有位置式和 增量式,聽說增量式pid更優(yōu)越。于是準備調(diào),PID公式如下int Error=0
2019-07-17 02:49:16
如何去設(shè)計模糊PID自整定控制器?關(guān)于模糊控制器算法的研究是什么?模糊PID控制器具有哪些特點?
2021-04-21 06:08:28
用protues仿真,然后溫度傳感器是DS18B20,但是這個軟件溫度傳感器是沒法測溫的,只能看一個控制效果。然后這個應(yīng)該怎么整定PID參數(shù)呢?因為它沒有出波形啊,所以不知道怎么做?
2017-04-20 15:54:51
規(guī)律的選用要根據(jù)過程特性和工藝要求來選取,決不是說 PID 控制規(guī)律在任何情況下都具有較好的控制性能,不分場合都采用是不明智的。如果這樣做,只會給其它工作增加復(fù)雜性,并給參數(shù)整定帶來困難。當(dāng)采用 PID
2020-02-23 07:00:00
PID參數(shù)的虛擬控制器。將此控制器用于時控系統(tǒng),控制效果理想,魯棒性強。關(guān)鍵詞:模糊參數(shù)自整定PID MATLAB Simulink 基于LabVIEW與MATLAB的模糊參數(shù)自整定PID控制.pdf
2019-04-03 09:40:03
難的往往不是PID的整定,而是一些細節(jié)的注意,如果大家細節(jié)做的好,開環(huán)做題又何妨當(dāng)然,錦上添花,何樂而不為上一張準備拆的擺(過程錄了視屏但是忘記拍整體了)四個空心杯電機,F(xiàn)767處理,9250角度
2021-09-13 07:26:53
PID常用口訣: 參數(shù)整定找最佳,從小到大順序查,先是比例后積分,最后再把微分加,曲線振蕩很頻繁,比例度盤要放大,曲線漂浮繞大灣,比例度盤往小扳
2011-06-21 11:58:341651 PID是一個閉環(huán)控制算法。因此要實現(xiàn)PID算法,必須在硬件上具有閉環(huán)控制,就是得有反饋。比如控制一個電機的轉(zhuǎn)速,就得有一個測量轉(zhuǎn)速的傳感器,并將結(jié)果反饋到控制路線上,下面也將以轉(zhuǎn)速控制為例。
2018-11-20 11:19:4619601 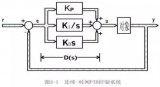
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論