 電子發(fā)燒友App
電子發(fā)燒友App


本文中將以分析幾個(gè)案例的方式拆解程序編程的過(guò)程,從控制過(guò)程到原理及梯形圖。如果采用其它系列或品牌的PLC,其邏輯結(jié)構(gòu)大同小異。
PLC原理圖到程序的經(jīng)典實(shí)例——交通信號(hào)燈控制
(1)明確系統(tǒng)控制要求
系統(tǒng)要求用兩個(gè)按鈕來(lái)控制交通信號(hào)燈工作,交通信號(hào)燈排列如下圖所示。
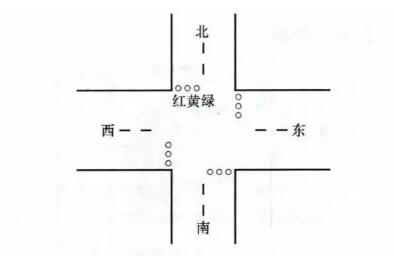
系統(tǒng)控制要求具體如下:
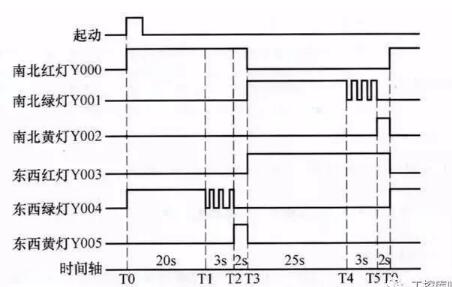
當(dāng)按下起動(dòng)按鈕后,南北紅燈亮25s,在南北紅燈亮25s的時(shí)間里,東西綠燈先亮20s再以1次/s的頻率閃爍3次,接著東西黃燈亮2s,25s后南北紅燈熄滅,熄滅時(shí)間維持30s,在這30s時(shí)間里,東西紅燈一直亮,南北綠燈先亮25s,然后以1次/s頻率閃爍3次,接著南北黃燈亮2s。以后重復(fù)該過(guò)程。按下停止按鈕后,所有的燈都熄滅。交通信號(hào)燈的工作時(shí)序如下圖所示。
(2)確定輸入/輸出設(shè)備,并為其分配合適的I/O端子
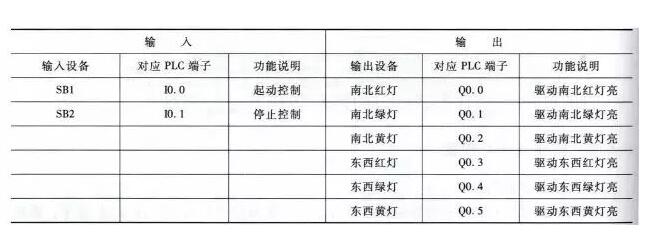
交通信號(hào)燈控制需用到的輸入/輸出設(shè)備和對(duì)應(yīng)的PLC端子見(jiàn)下表。
(3)繪制交通信號(hào)燈控制電路圖
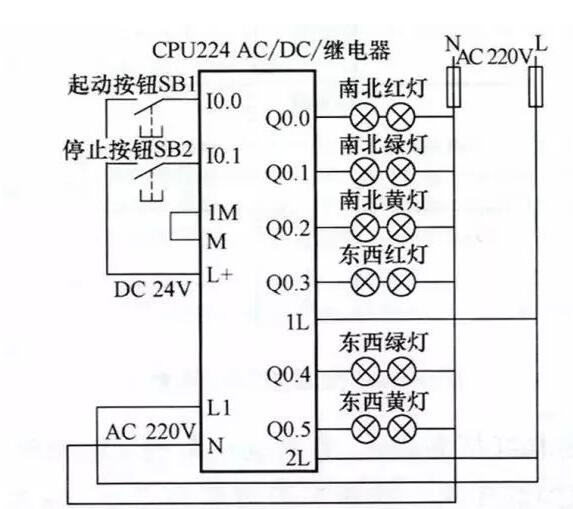
控制電路圖
(4)編寫(xiě)PLC控制程序
啟動(dòng)STEP 7-Micro/WIN編程軟件,編寫(xiě)滿(mǎn)足控制要求的梯形圖程序,編寫(xiě)完成的梯形圖如下圖所示。
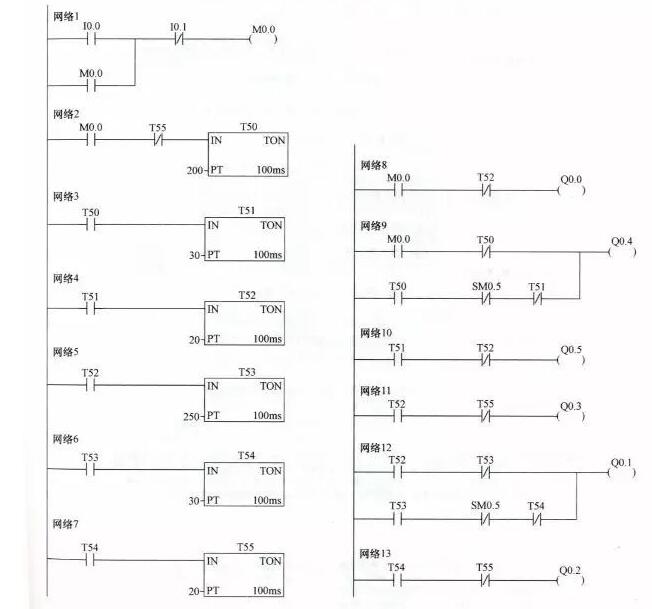
梯形圖
在上圖所示的梯形圖中,采用了一個(gè)特殊的輔助繼電器SM0.5,稱(chēng)為觸點(diǎn)利用型特殊繼電器,它利用PLC自動(dòng)驅(qū)動(dòng)線(xiàn)圈,用戶(hù)只能利用它的觸點(diǎn),即畫(huà)梯形圖里只能畫(huà)它的觸點(diǎn)。SM0.5能產(chǎn)生周期為1s的時(shí)鐘脈沖,其高低電平持續(xù)時(shí)間各為0.5s,以上圖梯形圖網(wǎng)絡(luò)9為例,當(dāng)T50常開(kāi)觸點(diǎn)閉合,在1s內(nèi),SM0.5常閉觸點(diǎn)接通、斷開(kāi)時(shí)間分別為0.5s,Q0.4線(xiàn)圈得電、失電時(shí)間也都為0.5s。
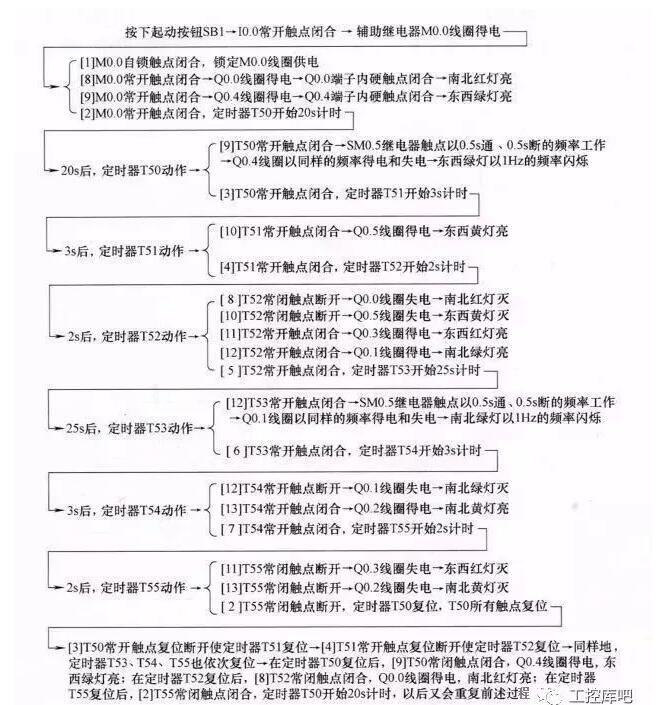
下面對(duì)照控制電路和時(shí)序圖來(lái)說(shuō)明梯形圖工作原理:
(1)起動(dòng)控制
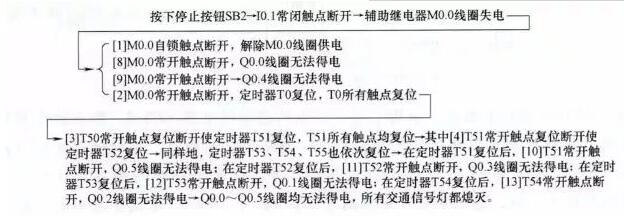
(2)停止控制
PLC原理圖到程序的經(jīng)典實(shí)例——噴泉控制
(1)明確系統(tǒng)控制要求
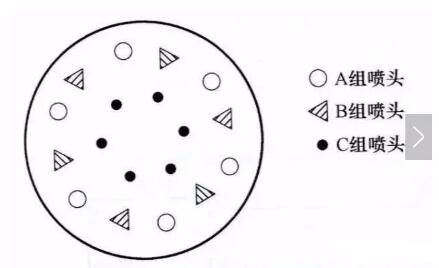
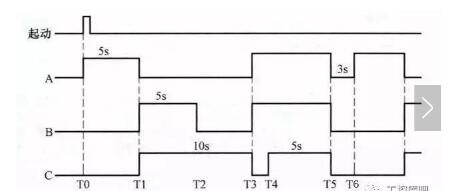
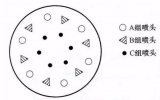
系統(tǒng)要求用兩個(gè)按鈕來(lái)控制A、B、C三組噴頭工作(通過(guò)控制三組噴頭的泵電動(dòng)機(jī)來(lái)實(shí)現(xiàn)),三組噴頭排列如下圖所示。
系統(tǒng)控制要求具體如下:
當(dāng)按下起動(dòng)按鈕后,A組噴頭先噴5s后停止,然后B、C組噴頭同時(shí)噴,5s后,B組噴頭停止、C組噴頭繼續(xù)噴5s再停止,而后A、B組噴頭噴7s,C組噴頭在這7s的前2s內(nèi)停止,后5s內(nèi)噴水,接著A、B、C三組噴頭同時(shí)停止3s,以后重復(fù)前述過(guò)程。按下停止按鈕后,三組噴頭同時(shí)停止噴水。下圖為A、B、C三組噴頭工作時(shí)序圖。
(2)確定輸入/輸出設(shè)備,并為其分配合適的I/O端子
噴泉控制需用到的輸入/輸出設(shè)備和對(duì)應(yīng)的PLC端子見(jiàn)下表:
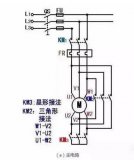
(3)繪制噴泉控制電路圖
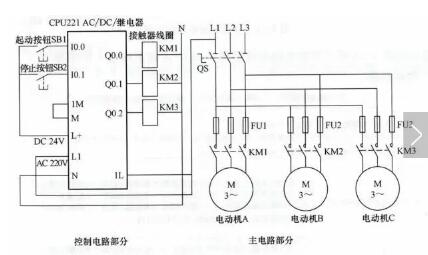
控制電路圖
(4)編寫(xiě)PLC控制程序
啟動(dòng)STEP 7-Micro/WIN編程軟件,編寫(xiě)滿(mǎn)足控制要求的梯形圖程序,編寫(xiě)完成的梯形圖如下圖所示。
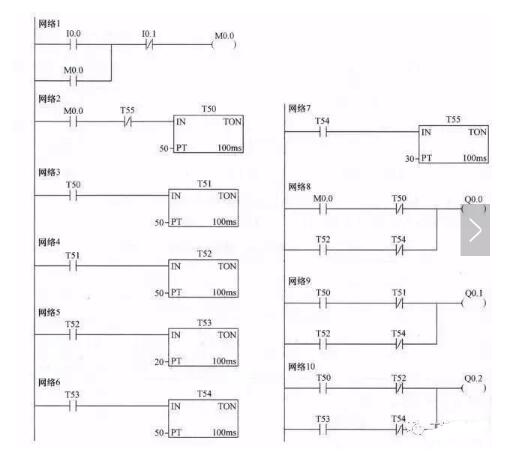
梯形圖
下面對(duì)照控制電路來(lái)說(shuō)明梯形圖的工作原理:
(1)起動(dòng)控制
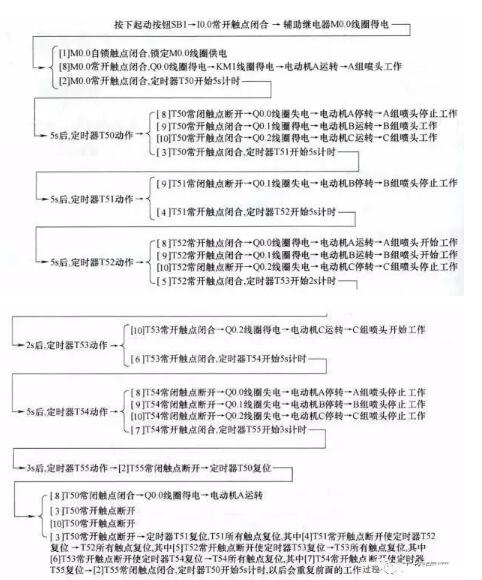
(2)停止控制
PLC原理圖到程序的經(jīng)典實(shí)例——多級(jí)傳送帶控制
(1)明確系統(tǒng)控制要求
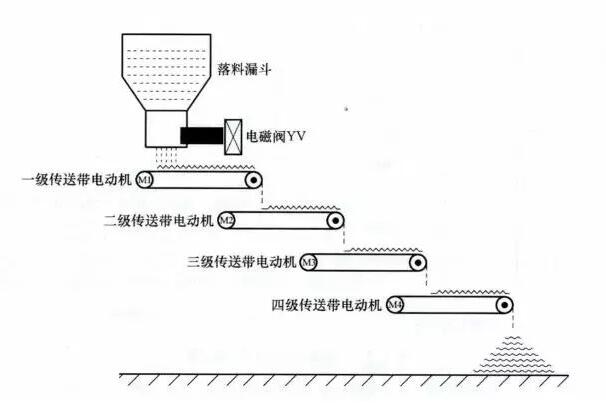
系統(tǒng)要求用兩個(gè)按鈕來(lái)控制傳送帶按一定方式工作,傳送帶結(jié)構(gòu)如下圖所示。
系統(tǒng)控制要求具體如下:
當(dāng)按下起動(dòng)按鈕后,電磁閥YV打開(kāi),開(kāi)始落料,同時(shí)一級(jí)傳送帶電動(dòng)機(jī)M1起動(dòng),將物料往前傳送,6s后二級(jí)傳送帶電動(dòng)機(jī)M2起動(dòng),M2起動(dòng)5s后三極傳送帶電動(dòng)機(jī)M3起動(dòng),M3起動(dòng)后4s后四級(jí)傳送帶電動(dòng)機(jī)M4起動(dòng)。
當(dāng)按下停止按鈕后,為了不讓各傳送帶上有物料堆積,要求先關(guān)閉電磁閥YV,6s后讓M1停轉(zhuǎn),M1停轉(zhuǎn)5s后讓M2停轉(zhuǎn),M2停轉(zhuǎn)4s后讓M3停轉(zhuǎn),M3停轉(zhuǎn)3s后讓M4停轉(zhuǎn)。
(2)確定輸入/輸出設(shè)備,并為其分配合適的I/O端子
多級(jí)傳送帶控制需用到的輸入/輸出設(shè)備和對(duì)應(yīng)的PLC端子見(jiàn)下表。

(3)繪制多級(jí)傳送帶控制電路圖
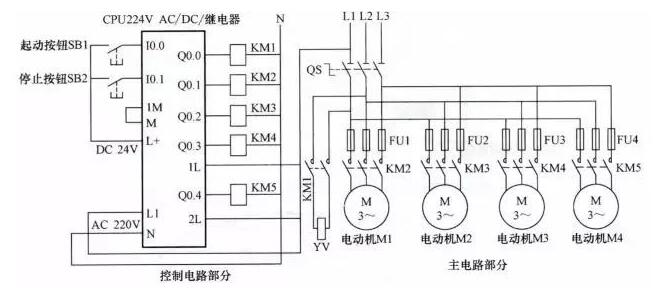
控制電路圖
(4)編寫(xiě)PLC控制程序
啟動(dòng)STEP 7-Micro/WIN編程軟件,編寫(xiě)滿(mǎn)足控制要求的梯形圖程序,編寫(xiě)完成的梯形圖如下圖所示。
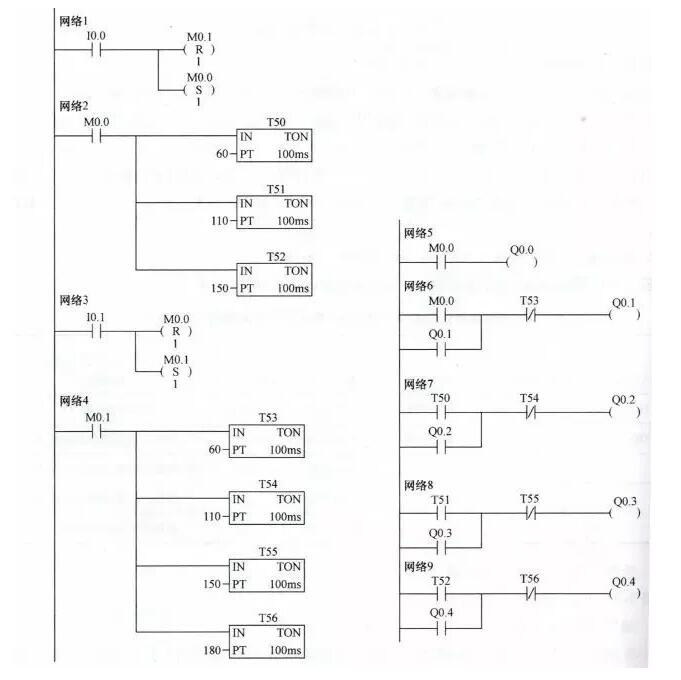
梯形圖
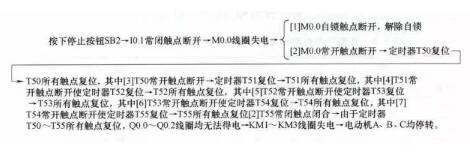
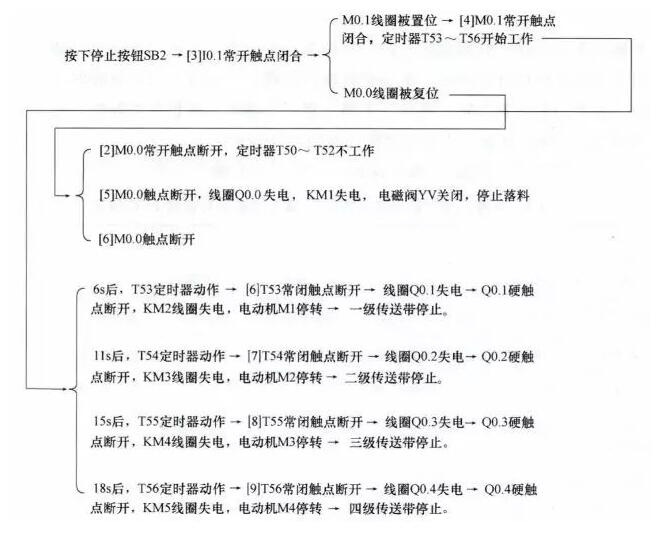
下面對(duì)照控制電路來(lái)說(shuō)明梯形圖的工作原理。
(1)起動(dòng)控制
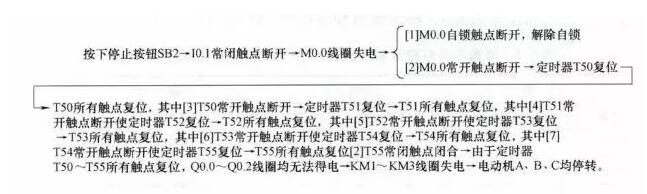
(2)停止控制
PLC原理圖到程序的經(jīng)典實(shí)例——車(chē)庫(kù)自動(dòng)門(mén)控制
(1)明確系統(tǒng)控制要求
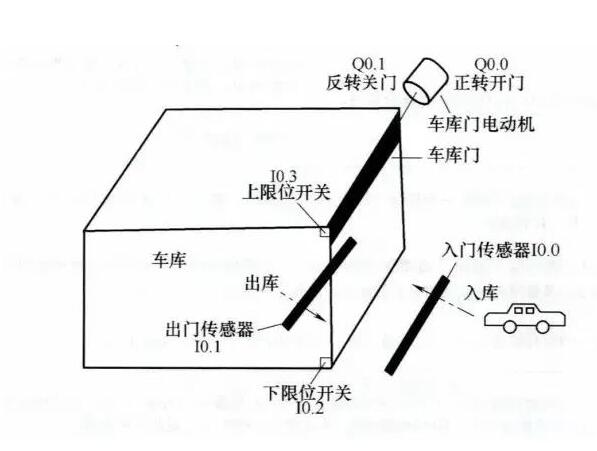
系統(tǒng)要求車(chē)庫(kù)門(mén)在車(chē)輛進(jìn)出時(shí)能自動(dòng)打開(kāi)關(guān)閉,車(chē)庫(kù)門(mén)控制結(jié)構(gòu)如下圖所示。
系統(tǒng)控制具體要求如下:
在車(chē)輛入庫(kù)經(jīng)過(guò)入門(mén)傳感器時(shí),入門(mén)傳感器開(kāi)關(guān)閉合,車(chē)庫(kù)門(mén)電動(dòng)機(jī)正轉(zhuǎn),車(chē)庫(kù)門(mén)上升,當(dāng)車(chē)庫(kù)門(mén)上升到上限位開(kāi)關(guān)處時(shí),電動(dòng)機(jī)停轉(zhuǎn);車(chē)輛進(jìn)庫(kù)經(jīng)過(guò)出門(mén)傳感器時(shí),出門(mén)傳感器開(kāi)關(guān)閉合,車(chē)庫(kù)門(mén)電動(dòng)機(jī)反轉(zhuǎn),車(chē)庫(kù)門(mén)下降,當(dāng)車(chē)庫(kù)門(mén)下降到下限位開(kāi)關(guān)處時(shí),電動(dòng)機(jī)停轉(zhuǎn)。
在車(chē)輛出庫(kù)經(jīng)過(guò)出門(mén)傳感器時(shí),出門(mén)傳感器開(kāi)關(guān)閉合,車(chē)庫(kù)門(mén)電動(dòng)機(jī)正轉(zhuǎn),車(chē)庫(kù)門(mén)上升,當(dāng)門(mén)上升到上限位開(kāi)關(guān)處時(shí),電動(dòng)機(jī)停轉(zhuǎn);車(chē)輛出庫(kù)經(jīng)過(guò)入門(mén)傳感器時(shí),入門(mén)傳感器開(kāi)關(guān)閉合,車(chē)庫(kù)門(mén)電動(dòng)機(jī)反轉(zhuǎn),車(chē)庫(kù)門(mén)下降,當(dāng)門(mén)下降到下限位開(kāi)關(guān)處時(shí),電動(dòng)機(jī)停轉(zhuǎn)。
(2)確定輸入/輸出設(shè)備,并為其分配合適的I/O端子
車(chē)庫(kù)自動(dòng)門(mén)控制需用到的輸入/輸出設(shè)備和對(duì)應(yīng)的PLC端子見(jiàn)下表:

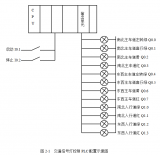
(3)繪制車(chē)庫(kù)自動(dòng)門(mén)控制電路圖
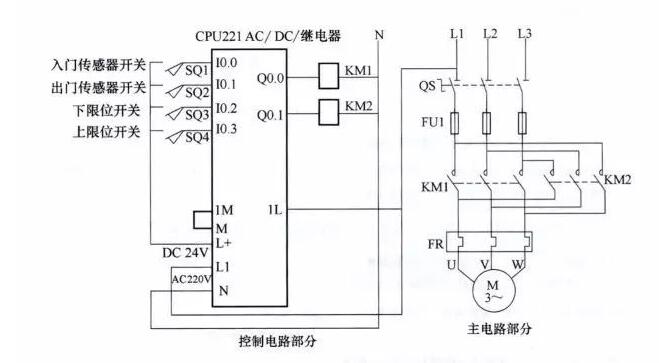
控制電路圖
(4)編寫(xiě)PLC控制程序
啟動(dòng)STEP 7-Micro/WIN編程軟件,編寫(xiě)滿(mǎn)足控制要求的梯形圖程序,編寫(xiě)完成的梯形圖如下圖所示。
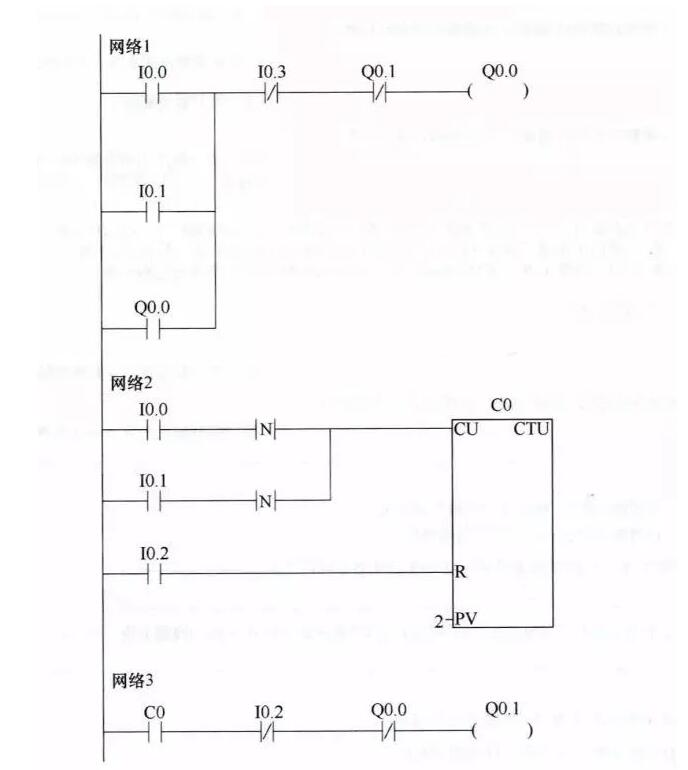
梯形圖
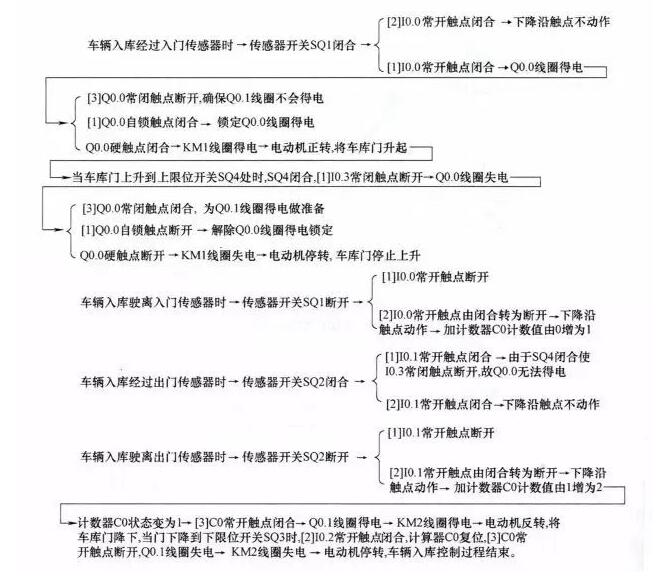
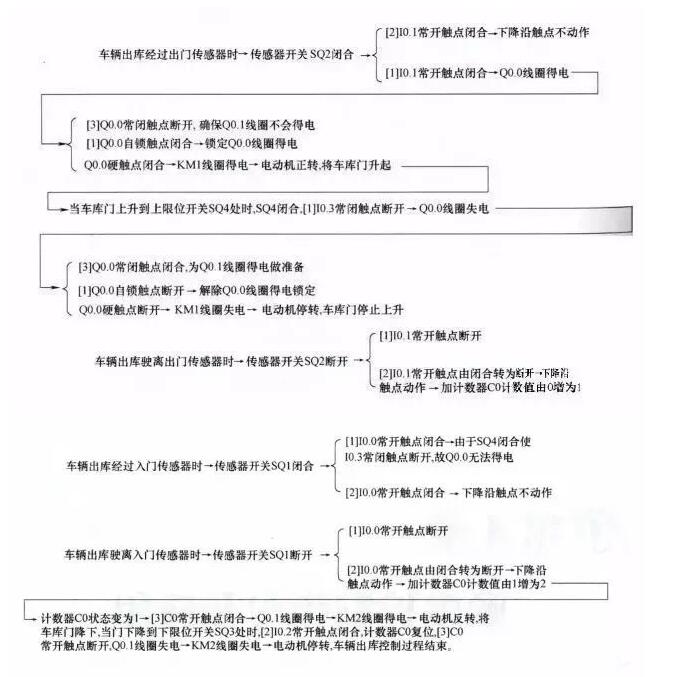
下面對(duì)照控制電路來(lái)說(shuō)明梯形圖的工作原理。
(1)入庫(kù)控制過(guò)程
(2)出庫(kù)控制過(guò)程











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論