 電子發燒友App
電子發燒友App


在生產機械中廣泛使用不改變同步轉速的調速方法有繞線式電動機的轉子串電阻調速、斬波調速、串級調速以及應用電磁轉差離合器、液力偶合器、油膜離合器等調速。改變同步轉速的有改變定子極對數的多速電動機,改變定子電壓、頻率的變頻調速有能無換向電動機調速等。
從調速時的能耗觀點來看,有高效調速方法與低效調速方法兩種:高效調速指時轉差率不變,因此無轉差損耗,如多速電動機、變頻調速以及能將轉差損耗回收的調速方法(如串級調速等)。有轉差損耗的調速方法屬低效調速,如轉子串電阻調速方法,能量就損耗在轉子回路中;電磁離合器的調速方法,能量損耗在離合器線圈中;液力偶合器調速,能量損耗在液力偶合器的油中。一般來說轉差損耗隨調速范圍擴大而增加,如果調速范圍不大,能量損耗是很小的。
交流電動機調速的基本原理和調速方式
根據前述的知識,對于交流電動機,有:
![]()
![]()
其中,![]() ——旋轉磁場轉速
——旋轉磁場轉速
![]() ——定子繞組交流電源頻率
——定子繞組交流電源頻率
![]() ——三相異步電動機的極數
——三相異步電動機的極數
![]() ——三相異步電動機轉子轉速
——三相異步電動機轉子轉速
![]() ——轉差率
——轉差率
由以上兩式消去![]() ,可以得到:
,可以得到:
![]() ……………………………………………………………………(式7-5-1)
……………………………………………………………………(式7-5-1)
根據上式,對異步電動機的調速有三個途徑,即:①改變定子繞組極對數![]() ;②改變轉差率
;②改變轉差率![]() ;③改變電源頻率
;③改變電源頻率![]() 。對于同步電動機,其轉差率
。對于同步電動機,其轉差率![]() ,它只具有兩種調速方式。實際應用的交流調速方式有多種,以下對幾種常用的方法簡單介紹:
,它只具有兩種調速方式。實際應用的交流調速方式有多種,以下對幾種常用的方法簡單介紹:
變極調速
這種調速方式只使用于專門生產的多級多速異步電動機。通過繞組的不同組合連接方式,可以獲得二、三、四極3種速度,這種調速方式速度變化是有級的,只適用于一些特殊應用的場合,只能達到大范圍粗調的目的。本課程第三章的學習單元八所介紹的正是雙速電動機的變速控制,其它類似多級多速電動機的調速控制線路與之類似。
轉子串電阻調速
這種調速方式只適用于繞線式轉子異步電動機,它是通過改變串聯于轉子電路中的電阻阻值的方式,來改變電動機的轉差率,進而達到調速的目的。由于外部串聯電阻的阻值可以多級改變,故可實現多種速度的調速(原理上,也可實現無級調速)。但由于串聯電阻消耗功率,效率較低,同時這種調速方式機械特性較軟,只適用于調速性能要求不高的場合。
串級調速
這種調速方式只適用于繞線式異步電動機,它是通過一定的電子設備將轉差功率反饋到電網中加以利用的方法。在風機、泵類傳動系統中應用較廣。
調壓調速
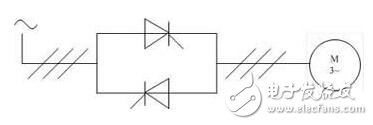
圖1 調壓調速示意圖
如圖1是將晶閘管反并聯連接,構成交流調速電路,通過調整晶閘管的觸發角,改變異步電動機的端電壓進行調速。這種方式也改變轉差率![]() ,轉差功率消耗在轉子回路中,效率較低,較適用于特殊轉子電動機(例如深槽電動機等高轉差率電動機)中。通常,這種調速方法應構成轉速或電壓閉環,才能實際應用。
,轉差功率消耗在轉子回路中,效率較低,較適用于特殊轉子電動機(例如深槽電動機等高轉差率電動機)中。通常,這種調速方法應構成轉速或電壓閉環,才能實際應用。
電磁調速異步電動機
這種系統是在異步電動機與負載之間通過電磁耦合傳遞機械功率,調節電磁耦合器的勵磁,可調整轉差率![]() 的大小,從而達到調速的目的。該調速系統結構簡單,價格便宜,適用于簡單的調整系統中。但它的轉差功率消耗在耦合器上,效率低。
的大小,從而達到調速的目的。該調速系統結構簡單,價格便宜,適用于簡單的調整系統中。但它的轉差功率消耗在耦合器上,效率低。
變頻調速
?
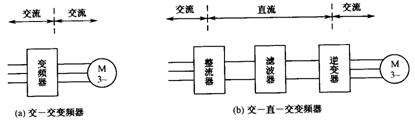
改變供電頻率,可使異步電動機獲得不同的同步轉速。采用變頻機對異步電動機供電的調速方法已很少使用。目前大量使用的是采用半導體器件構成的靜止變頻器電源。目前這類調速方法已成為交流調速發展的主流。
詳解異步電動機幾種調速方法解析
調速方法
從異步電動機的轉速關系式:
n=n1(1-S)=60(f1/P)(1-S)
可見,要改變異步電動機的轉速,可從下列三個方面著手:
1.改變異步電動機定子繞組的極對數P,以改變定子旋轉磁場的轉速n1,即所謂變極調速(不能均勻調速)。
2.改變電動機所接電源的頻率以改變n1,即所謂變頻調速;
3.改變電動機的轉差率S。
其中,改變轉差率S有很多種方法。當負載的總制動轉矩不變時,與它平衡的電磁轉矩也跟著不變,于是,從電磁轉矩參數表達式(略)可見,當頻率f1和極對數P不變時,轉差率S是定子端電壓、定子電阻、漏抗等物理量的函數,因此,改變轉差率S的方法有下列幾種:
(1)改變加與定子的端電壓,為此需用調壓器調壓;
(2)改變定子電阻或漏抗,為此須在定子串聯外加電阻或電抗器;
(3)改變轉子電阻,為此采用繞線式電動機,在轉子回路串入外加電阻;
(4)改變轉子電抗,為此須在轉子回路串入電抗或電容器。
(5)在轉子回路中引入一個轉差率f2=Sf1的外加電勢,為此須利用另一臺電機來供給所需的外加電勢,該電機可與原來電動機共軸,或不共軸,這樣將幾臺電機在電方面串聯在一起以達到調速目的,稱為串級調速。串級調速可用一種可控硅調速來代替。其基本原理為:先將異步電動機轉子回路中的轉差頻率交流電流用半導體整流器整流為直流,再經過可控硅逆變器把直流變為交流,送回到交流電網中去。這時逆變器的電壓便相當于加到轉子回路中的電勢,控制逆變器的逆變角,可改變逆變器的電壓,也即改變加于轉子回路中的電勢,從而實現調速的目的。
從上分析,可見異步電動機的調速方法很多,下面介紹主要的三種,即變極調速、變頻調速和改變轉子電阻調速。
變極調速
由于一般異步電動機正常運行時的轉差率S都很小,電機的轉速n= n1(1-S)決定于同步轉速n1。從n1=60f1/P可見,在電源頻率f1不變的情況下,改變定子繞組的極對數P,同步轉速n1就發生變化,例如極對數增加一倍,同步轉速就下降一半,隨之電動機的轉速也約下降一半。顯然,這種調速方法只能做到一級一級地改變轉速,而不是平滑調速。
變極電動機一般都用鼠籠式轉子,因為鼠籠轉子的極對數能自動地隨著定子極對數的改變而改變,使定、轉子磁場的極對數總是相等而產生平均電磁轉矩。若為繞線式轉子,則定子極對數改變時,轉子繞組必須相應地改變接法以得到與定子相同的極對數,很不方便。
要使定子具有兩種極對數,容易得到的辦法是用兩套極對數不同的定子繞組,每次用其中一套,即所謂雙繞組變極,顯然,這是一個很不經濟的辦法,只在特殊情況下才采用。理想的辦法是:只裝一套定子繞組而用改變繞組接法來獲得兩種或多種極對數,即所謂單繞組變極。對于倍極比情況(如2/4極、4/8極等),單繞組變極早已為人們所采用,隨著科學技術的發展,非倍極比(如4/6極、6/8極等)以及三速(如4/6/8等)采用單繞組變極也得到廣泛應用。
變頻調速
當電源的頻率f1改變時,同步轉速n1=60f1/P與頻率成正比變化,于是電動機的轉速n也隨之改變,所以改變電源頻率就可以平滑地調節異步電動機的轉速。
變頻調速按控制方式不同,可分為U/f控制、轉差頻率控制、矢量控制和直接轉矩控制等。
(1) U/f控制。U/f控制是為了得到理想的轉矩-速度特性,基于在改變電源頻率進行調速的同時,又要保證電動機的磁通不變的思想而提出的。通用型變頻器基本上都采用這種控制方式。U/f控制變頻器結構非常簡單,缺點是變頻器采用開環控制方式,不能達到較高的控制性能,而且在低頻時必須進行轉矩補償,才能改善低頻轉矩特性。
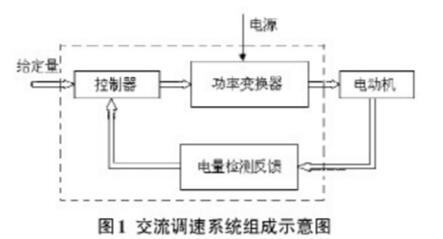
(2) 轉差頻率控制。轉差頻率控制是一種直接控制轉矩的控制方式,它是在U/f控制的基礎上,按照知道異步電動機的實際轉速對應的電源頻率,并根據希望得到的轉矩來調節變頻器的輸出頻率,就可以使電動機具有對應的輸出轉矩。這種控制方式,在控制系統中需要安裝速度傳感器,有時還加有電流反饋,以對頻率和電流進行控制,因此是一種閉環控制方式。該方式可以使變頻器具有良好的穩定性,并對急速的加減速和負載變動有良好的響應特性。
(3)矢量控制。矢量控制是通過矢量坐標電路控制電動機定子電流的大小和相位,以達到對電動機在d、q、O坐標軸系中的勵磁電流和轉矩電流分別進行控制,進而達到控制電動機轉矩的目的。通過控制各矢量的作用順序、時間以及零矢量的作用時間,又可以形成各種PWM波,達到各種不同的控制目的,例如形成開關次數最少的PWM波以減少開關損耗。目前,在變頻器中實際應用的矢量控制方式主要有基于專差頻率控制的矢量控制方式和無速度傳感器的矢量控制方式兩種。
基于轉差頻率的矢量控制方式與轉差頻率控制方式兩者的定常特性一致,但是基于轉差頻率的矢量控制還要經過坐標變換對電動機定子電流的相位進行控制。使之滿足一定的條件,以消除轉矩電流過渡過程中的波動。因此,基于轉差頻率的矢量控制方式比轉差頻率控制方式在輸出特性方面能得到很大的改善。但是,這種控制方式屬于閉環方式,需要在電動機上安裝速度傳感器,因此應用范圍受到限制。
無速度傳感器矢量控制是通過坐標變換處理,分別對勵磁電流和轉矩電流進行控制,然后通過控制電動機定子繞組上的電壓、電流辨識轉速,以達到控制勵磁電流和轉矩電流的目的。這種控制方式調速范圍寬,起動轉矩大,工作可靠,操作方便,但計算比較復雜,一般需要專門的處理器來進行計算。因此,該方式實時性不是太理想,控制精度受到計算精度的影響。
(4)直接轉矩控制。直接轉矩控制是利用空間矢量坐標的概念,在定子坐標系下分析交流電動機的數學模型,控制電動機的磁鏈和轉矩,通過檢測定子電阻來達到觀測定子磁鏈的目的,因此省去了矢量控制等復雜的變換計算,系統直觀、簡潔,計算速度和精度都比矢量控制方式有所提高。即使在開環的狀態下,也能輸出100%的額定轉矩,對于一臺變頻器向多臺電動機供電的多拖動具有負荷平衡功能。
變頻調速用于風機和泵類機械的節能效果明顯。
以上各類控制適用于變頻調速專用電機。變頻電機由傳統的鼠籠式電動機發展而來,把傳統的電機風機改為獨立出來的風機,并且提高了電機繞組的絕緣性能。
轉子回路串電阻調速
在轉子回路串一變阻器調速只適用于繞線式異步電動機。調速時的接線圖和起動時的一樣,所不同的是:一般起動變阻器都是短時工作的,而調速用的變阻器應為長期工作的。
調速時的物理過程和直流電動機在電樞回路中串電阻調速一樣。在變阻器的電阻增加最初瞬間,電動機的的轉速還來不及改變,因此轉子電流減小,相應地電磁轉矩也減小,電動機的轉速開始下降,而轉子的電勢開始增加,隨之轉子電流又回頭增加。這個過程一直進行到轉子電流增加到與其對應的電磁轉矩和總負載轉矩互相平衡為止,這時電動機在一個較低轉速下穩定運行。
當轉子回路串入調速電阻時,若電動機總負載轉矩保持不變,電動機從一個運行點到另一個運行點,相應地轉差率從S1增加到S2,轉速則從n1(1-S1)降到n1(1-S2)。增加調速電阻,轉速便越下降。
從轉子回路串電阻調速曲線圖(略)可見在一定的調速電阻變化范圍內,調速范圍的大小隨負載的輕重而變化;在空載下調速,則調速范圍甚小,實際上達不到調速的目的。
此外,在恒轉矩調速時,從電磁轉矩參數表達式(略)可知,恒轉矩調速時轉差率s將隨轉子回路總電阻成正比例變化,總電阻增加一倍,則轉差率也增加一倍,于是根據等效電路可見:恒轉矩調速時,定、轉子電流、輸入功率、氣隙磁場和電磁功率皆不變,而與轉子回路串入電阻的大小無關。于是,如果把轉速調得愈低,即轉差率愈大,就需要在轉子回路串入愈大的電阻,隨之轉子銅耗就愈大,電動機效率就愈低。可見這種調速方法很不經濟,降低轉速所減少的輸出功率全部消耗于調速電阻的銅耗上。另一缺點是轉子加電阻后電動機的機械特性變軟,即負載變化時轉速將發生顯著變化。
由此可見在轉子回路串電阻調速存在很多缺點,但由于比較簡單,又可平滑調速,在中小容量的繞線式電動機還是用得不少,例如交流電源的橋式起重機幾乎都用到這種方法調速。









 工商網監
工商網監
評論