 電子發燒友App
電子發燒友App


?
視覺引導的運動:如果你的應用需要一個視覺系統來引導機器人,那么必須知道視覺系統與運動系統是如何集成的。對于校準和操作,沒集成的運動系統與視覺系統是初步的系統,機械人或機構和視覺系統是分開校準的。在操作中,一***立的視覺系統根據在視覺坐標系統中的已知位置計算出零件位置的偏移量,然后發指令給機器人的手臂在離初始化編程的拾取位置的偏移量處拾取零件。
由于機器視覺系統可以快速獲取大量信息,而且易于自動處理,也易于同設計信息以及加工控制信息集成,因此,在現代自動化生產過程中,人們將機器視覺系統廣泛地用于裝配定位、產品質量檢測、產品識別、產品尺寸測量等方面。
機器視覺系統的特點是提高生產的柔性和自動化程度。在一些不適合于人工作業的危險工作環境或人工視覺難以滿足要求的場合,常用機器視覺來替代人工視覺;同時在大批量工業生產過程中,用人工視覺檢查產品質量效率低且精度不高,用機器視覺檢測方法可以大大提高生產效率和生產的自動化程度。而且機器視覺易于實現信息集成,是實現計算機集成制造的基礎技術。使用機器視覺系統五個主要原因:
重復性——機器可以以相同的方法一次一次的完成檢測工作而不會感到疲倦。與此相反,人眼每次檢測產品時都會有細微的不同,即使產品時完全相同的。
精確性——由于人眼有物理條件的限制,在精確性上機器有明顯的優點。即使人眼依靠放大鏡或顯微鏡來檢測產品,機器仍然會更加精確,因為它的精度能夠達到千分之一英寸。
速度機器能夠更快的檢測產品。特別是當檢測高速運動的物體時,比如說生產線上,機器能夠提高生產效率。
客觀性——人眼檢測還有一個致命的缺陷,就是情緒帶來的主觀性,檢測結果會隨工人心情的好壞產生變化,而機器沒有喜怒哀樂,檢測的結果自然非常可觀可靠。
成本——由于機器比人快,一臺自動檢測機器能夠承擔好幾個人的任務。而且機器不需要停頓、不會生病、能夠連續工作,所以能夠極大的提高生產效率。
工業相機作為機器視覺系統中的核心部件,對于機器視覺系統的重要性是不言而喻的。按照分類的不同,相機又分為很多種:
1、彩色相機、黑白相機:
黑白相機直接將光強信號轉換成圖像灰度值,生成的是灰度圖像;彩色相機能獲得景物中紅、綠、藍三個分量的光信號,輸出彩色圖像。彩色相機能夠提供比黑白相機更多的圖像信息。彩色相機的實現方法主要有兩種,棱鏡分光法和Bayer濾波法。棱鏡分光彩色相機,利用光學透鏡將入射光線的R、G、B分量分離,在三片傳感器上分別將三種顏色的光信號轉換成電信號,最后對輸出的數字信號進行合成,得到彩色圖像。
2、CCD相機、CMOS相機
芯片主要差異在于將光轉換為電信號的方式。對于CCD傳感器,光照射到像元上,像元產生電荷,電荷通過少量的輸出電極傳輸并轉化為電流、緩沖、信號輸出。對于CMOS傳感器,每個像元自己完成電荷到電壓的轉換,同時產生數字信號。
3、按靶面類型分類:面陣相機、線陣相機
相機不僅可以根據傳感器技術進行區分,還可以根據傳感器架構進行區分。有兩種主要的傳感器架構:面掃描和線掃描。面掃描相機通常用于輸出直接在監視器上顯示的場合。線掃描相機用于連續運動物體成像或需要連續的高分辨率成像的場合。線掃描相機的一個自然的應用是靜止畫面(Web Inspection)中要對連續產品進行成像,比如紡織、紙張、玻璃、鋼板等。同時,線掃描相機同樣適用于電子行業的非靜止畫面檢測。像德國Kappa相機根據它CCD的規格也會有線陣、面陣之分。
4 按輸出模式分類:模擬相機、數字相機
根據相機數據輸出模式的不同分為模擬相機和數字相機,模擬相機輸出模擬信號,數字相機輸出數字信號。模擬相機和數字相機還可以進一步細分,比如德國Kappa相機按數據接口又包括:USB 2.0接口、EE 1394 a / Fire Wire、Camera Link 接口、千兆以太網接口。模擬相機分為逐行掃描和隔行掃描兩種,隔行掃描相機又包含EIA、NTSC、CCIR、PAL等標準制式。有關接口技術的詳細介紹請參考采集卡及采集技術部分。
在選擇一款工業數字相機時,物體成像的速度必須充分考慮好。例如,假設在拍攝過程中,物體在曝光中沒有移動,可用相對簡單和便宜的工業相機;對于靜止或緩慢移動的物體,面陣工業相機最適合于對靜止或移動緩慢的物體成像。因為整個面陣區域必須一次曝光,在曝光時間當中任何的移動會導致圖像的模糊,但是,運動模糊可以通過減少曝光時間或使用閃光燈來控制;對于快速移動的物體,當對運動的物體使用一個面陣工業相機時,需要考慮在曝光時間當中處于工業相機當中的運動對象數量,還需要考慮物體上能用一個像素表征的最小特征,也就是對象分辨率,在采集運動物體的圖像的拇指規則就是曝光必須發生在采集物體移動量小于一個像素的時間內。如果你采集的物體是在以1厘米/秒的速度勻速移動,而且物體分辨率已經設置為1 pixel/mm,那么需要的最大曝光時間是1/10每秒。因為物體移動一個距離恰好等于相機傳感器中的一個像素,當使用最大曝光時間時這里會有一定數量的模糊。在這種情況下,一般傾向于將曝光時間設置的比最大值要快,比如1/20每秒,就能保持物體在移動半個像素內成像。如果同樣的物體以1厘米/秒的速度移動,物體分辨率為1 pixel/微米,那么一秒中所需要的最大曝光是1/10000.曝光設置的對快取決于所采用的相機,還有你是否能夠給物體足夠的光來獲得一幅好的圖像。
機器視覺在中國的發展已有十余個年頭。過去十年是機器視覺產業在中國市場發展最快的十年,經過一定時期的普及與推廣,機器視覺已逐漸為廣大客戶所熟知,而且應用范圍,也逐漸開始擴大,大規模的應用領域由起初的電子、制藥等行業,逐步擴展到包裝、印刷等各大領域。
機器視覺市場在發展,機器視覺技術在進步,在以不斷滿足客戶發展需求的同時,最基本需求的滿足也是不容忽視的。一直以來,我國的科技水平都處于不斷發展的階段,機器視覺技術作為科技發展的產物,為了更好的適應行業需求,也在不斷的優化升級。縱觀行業發展,國內機器視覺市場機遇與挑戰并存,而行業技術的升級更顯得尤為必要了。為順應行業發展趨勢,國內的機器視覺技術就需要通過以下四大要素來升級。
一、系統操作簡單方便
技術參數簡單化、處理技術方便化,是系統操作最為關鍵也是核心的要素。機器視覺技術雖然屬于高科技技術,在運作過程中,還需要依靠不斷調整各種參數來達到最好的效果。但是目前來說,操作人員大都技術水平有限。因此,系統簡化是大多數客戶的較價格與質量之后的基本需求,而系統簡化主要包括的是檢測操作的簡化與圖像處理的簡化。
二、系統長期可維護性
一個好的系統不僅要考慮使用性還應考慮其在長期運做中的可維護性,機器視覺技術的穩定性、可靠性足以使系統在實際應用中,更好的發揮功能優勢,提供有力的技術支持。
三、檢測技術穩定可靠
在工業生產過程中,由于被測物體的多樣化以及機械的誤差影響,使得整個檢測過程很難是維持在平穩的狀態。因此,這就需要機器視覺技術有很高的穩定性,從光源照明、圖像采集到圖像存儲與處理都要有可以在任何環境下持續運作的適應能力,同時,還要盡量能采集到突出檢測對象的圖像,這樣才能給出最為穩定、準確、清晰的檢測結果,才能為生產或質檢工作提供技術支持。
四、系統性價比值高
在保障質量的基礎上,客戶最為關心的莫過于價格問題。機器視覺技術不斷升級本是件對客戶有益的事,但如果只是一味的使用昂貴的部件,就會造成價格的大幅提升,對于大部分的用戶來說,無疑增添了負擔。性能好、價格低的系統才是能滿足最基本需求的,因此性價比是衡量一個系統的重要標志,也是客戶選擇產品最重要的指標之一。
中國是世界的制造工廠,目前全球幾乎所有的知名企業都把生產工廠放在中國,機器作業代替人員操作已成為市場優勝劣汰的必然選擇。機器視覺產業在中國有著非常廣闊而光明的前景,也使中國機器視覺市場成為全球機器視覺企業的競爭焦點,因此我們要抓住時機,不斷引進各項高新技術,促進行業的快速發展。
在機器視覺系統中,獲得一張高質量的可處理的圖像是至關重要。系統之所以成功,首先要保證圖像質量好,特征明顯,。一個機器視覺項目之所以失敗,大部分情況是由于圖像質量不好,特征不明顯引起的。要保證好的圖像,必須要選擇一個合適的光源。
光源選型基本要素
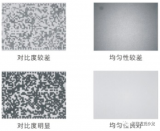
光源選型基本要素: 對比度:對比度對機器視覺來說非常重要。機器視覺應用的照明的最重要的任務就是使需要被觀察的特征與需要被忽略的圖像特征之間產生最大的對比度,從而易于特征的區分。對比度定義為在特征與其周圍的區域之間有足夠的灰度量區別。好的照明應該能夠保證需要檢測的特征突出于其他背景。
亮度:當選擇兩種光源的時候,最佳的選擇是選擇更亮的那個。當光源不夠亮時,可能有三種不好的情況會出現。第一,相機的信噪比不夠;由于光源的亮度不夠,圖像的對比度必然不夠,在圖像上出現噪聲的可能性也隨即增大。其次,光源的亮度不夠,必然要加大光圈,從而減小了景深。另外,當光源的亮度不夠的時候,自然光等隨機光對系統的影響會最大。
魯棒性:另一個測試好光源的方法是看光源是否對部件的位置敏感度最小。當光源放置在攝像頭視野的不同區域或不同角度時,結果圖像應該不會隨之變化。方向性很強的光源,增大了對高亮區域的鏡面反射發生的可能性,這不利于后面的特征提取。
好的光源需要能夠使你需要尋找的特征非常明顯,除了是攝像頭能夠拍攝到部件外,好的光源應該能夠產生最大的對比度、亮度足夠且對部件的位置變化不敏感。光源選擇好了,剩下來的工作就容易多了。具體的光源選取方法還在于試驗的實踐經驗:
1、環形光源
提供不同照射角度、不同顏色組合,更能突出物體的三維信息;高密度LED陣列,高亮度;多種緊湊設計,節省安裝空間;解決對角照射陰影問題;可選配漫射板導光,光線均勻擴散。應用于:PCB基板檢測,IC元件檢測,顯微鏡照明,液晶校正,塑膠容器檢測,集成電路印字檢查。
2、背光源
用高密度LED陣列面提供高強度背光照明,能突出物體。的外形輪廓特征,尤其適合作為顯微鏡的載物臺。紅白兩用背光源、紅藍多用背光源,能調配出不同顏色,滿足不同被測物多色要求。應用于:機械零件尺寸的測量,電子元件、IC的外型檢測,膠片污點檢測,透明物體劃痕檢測等。
3、條形光源
較大方形結構被測物的首選光源;顏色可根據需求搭配,自由組合;照射角度與安裝隨意可調。應用于:金屬表面檢查,圖像掃描,表面裂縫檢測,LCD面板檢測等。
4、同軸光源 光的一致性好
可以消除物體表面不平整引起的陰影,從而減少干擾;部分采用分光鏡設計,減少光損失,提高成像清晰度,均勻照射物體表面。應用于:系列光源最適宜用于反射度極高的物體,如金屬、玻璃、膠片、晶片等表面的劃傷檢測,芯片和硅晶片的破損檢測,Mark點定位,包裝條碼識別。
5、AOI專用光源
不同角度的三色光照明,照射凸顯焊錫三維信息;外加漫射板導光,減少反光;不同角度組合;應用于:電路板焊錫檢測。
6、球積分光源
具有積分效果的半球面內壁,均勻反射從底部360度發射出的光線,使整個圖像的照度十分均勻。應用于:合于曲面,表面凹凸,弧形表面檢測,或金屬、玻璃表面反光較強的物體表面檢測。
7、線形光源
超高亮度,采用柱面透鏡聚光,適用于各種流水線連續檢測場合。:陣相機照明專用,AOI專用。
8、點光源
大功率LED,體積小,發光強度高;光纖鹵素燈的替代品,尤其適合作為鏡頭的同軸光源等;高效散熱裝置,大大提高光源的使用壽命。應用于:適合遠心鏡頭使用,用于芯片檢測,Mark點定位,晶片及液晶玻璃底基校正。
9、組合條形光源
四邊配置條形光,每邊照明獨立可控;可根據被測物要求調整所需照明角度,適用性廣。應用案例:CB基板檢測,IC元件檢測,焊錫檢查,Mark點定位,顯微鏡照明,包裝條碼照明,球形物體照明等。
10、對位光源
對位速度快;視場大;精度高;體積小,便于檢測集成;亮度高,可選配輔助環形光源。是全自動電路板印刷機對位的專用光源。
工業鏡頭的選型
鏡頭的選擇過程,是將鏡頭各項參數逐步明確化的過程。作為成像器件,鏡頭通常與光源、相機一起構成一個完整的圖像采集系統,因此鏡頭的選擇受到整個系統要求的制約。一般地可以按以下幾個方面來進行分析考慮。
一、波長、變焦與否
鏡頭的工作波長和是否需要變焦是比較容易先確定下來的,成像過程中需要改變放大倍率的應用,采用變焦鏡頭,否則采用定焦鏡頭就可以了。
關于鏡頭的工作波長,常見的是可見光波段,也有其他波段的應用。是否需要另外采取濾光措施?單色光還是多色光?能否有效避開雜散光的影響?把這幾個問題考慮清楚,綜合衡量后再確定鏡頭的工作波長。
二、特殊要求優先考慮
結合實際的應用特點,可能會有特殊的要求,應該先予明確下來。例如是否有測量功能,是否需要使用遠心鏡頭,成像的景深是否很大等等。景深往往不被重視,但是它卻是任何成像系統都必須考慮的。
三、工作距離、焦距
工作距離和焦距往往結合起來考慮。一般地,可以采用這個思路:先明確系統的分辨率,結合CCD像素尺寸就能知道放大倍率,再結合空間結構約束就能知道大概的物像距離,進一步估算鏡頭的焦距。所以鏡頭的焦距是和鏡頭的工作距離、系統分辨率(及CCD像素尺寸)相關的。
四、像面大小和像質
所選鏡頭的像面大小要與相機感光面大小兼容,遵循“大的兼容小的”原則——相機感光面不能超出鏡頭標示的像面尺寸——否則邊緣視場的像質不保。像質的要求主要關注MTF和畸變兩項。在測量應用中,尤其應該重視畸變。
五、光圈和接口
鏡頭的光圈主要影響像面的亮度。但是現在的機器視覺中,最終的圖像亮度是由很多因素共同決定的:光圈、相機增益、積分時間、光源等等。所以為了獲得必要的圖像亮度有比較多的環節供調整。鏡頭的接口指它與相機的連接接口,它們兩者需匹配,不能直接匹配就需考慮轉接。
六、鏡頭的其它類別:
線陣鏡頭:配合線陣相機使用的鏡頭。采用掃描式的工作方式,需要鏡頭與目標相對運動,每次曝光成像一條線,多次曝光組成一幅圖像。線陣掃描成像的特點:CCD線陣方向的圖像分辨率固定,而在目標的運動方向上,空間采樣頻率與運動的相對速度有關。
從成像的角度講,線陣鏡頭和其它類型的鏡頭并沒有本質的差異。只是對鏡頭的使用方式不同而已。
顯微鏡頭:為了看清目標的細節特征,顯微鏡頭一般使用在高分辨率的場合。它們基本的特點是工作距離短,放大倍率高,視場小。
遠心鏡頭:物方主光線平行于光軸主光線的會聚中心位于物方無限遠,稱之為物方遠心光路。作用:可以消除物方由于調焦不準確帶來的測量誤差。
機器視覺光源的作用
機器視覺光源是機器視覺系統中不可或缺的一部分,它的選擇直接影響輸入數據的質量和應用效果。由于沒有通用的機器視覺照明設備,所以針對每個特定的應用實例,要選擇相應的照明裝置,以達到最理想的應用效果。
照明系統是機器視覺系統最為關鍵的部分之一,直接關系到系統的成敗。好的打光設計能夠使我們得到一幅好的圖象,從而改善整個系統的分辨率,簡化軟件的運算,而不適合的照明,則會引起很多的問題。
1、照亮目標,提高亮度
2、用作測量的工具或參照物
3、克服環境光干擾,保證圖象穩定性;
4、 形成有利于圖象處理的效果;
機器視覺光源的選擇
1、物體表面:如使機器視覺照明復雜化的是物體表面的變化造成的。如果所有物體表面是相同的,在解決實際應用的時候就沒有必要采用不同的光源技術了。但由于物體表面的不同,因此需要觀察視野中的物體表面,并分析光源入射的反映。
2、控制反射:如果反射光可以控制,圖像就可以控制。在涉及機器視覺應用的光源設計時,最重要的原則就是控制好哪里的光源反射到透鏡及反射的程度。機器視覺的光源設計就是對反射的研究。在視覺應用中,當觀測一個物體以決定需要什么樣的光源的時候,首先要弄清楚如何才能讓物體顯現?我如何才能應用光源使必須的光反射到鏡頭中以獲得物體外表?
3、光源可預測: 當光源入射到物體表面的時候,光源的反映是可以預測的。光源可能被吸收或被反射。光可能被完全吸收(黑金屬材料,表面難以照亮)或者被部分吸收(造成了顏色的變化及亮度的不同)。不被吸收的光就會被反射,入射光的角度等于反射光的角度,這個科學的定律大大簡化了機器視覺光源,因為理想的想定的效果可以通過控制光源而實現。
一幅好的圖象具備以下條件:
1. 對比度明顯,目標與背景的邊界清晰
2. 背景盡量淡化而且均勻,不干擾圖象處理;
3. 與顏色有關的還需要顏色真實,亮度適中,不過度曝光。
4. 整體亮度均勻,整體不均勻灰度差不影響圖象處理;
工業相機是機器視覺系統中的一個關鍵組件,其最本質的功能就是將光信號轉變成小型高清工業相機為有序的電信號。
工業相機又俗稱攝像機,相比于傳統的民用相機(攝像機)而言,它具有高的圖像穩定性、高傳輸能力和高抗干擾能力等,目前市面上工業相機大多是基于CCD或CMOS芯片的相機。CCD是目前機器視覺最為常用的圖像傳感器。它集光電轉換及電荷存貯、電荷轉移、信號讀取于一體,是典型的固體成像器件。CCD的突出特點是以電荷作為信號,而不同于其它器件是以電流或者電壓為信號。這類成像器件通過光電轉換形成電荷包,而后在驅動脈沖的作用下轉移、放大輸出圖像信號。典型的CCD相機由光學鏡頭、時序及同步信號發生器、垂直驅動器、模擬/數字信號處理電路組成。CCD作為一種功能器件,與真空管相比,具有無灼傷、無滯后、低電壓工作、低功耗等優點。CMOS圖像傳感器的開發最早出現在20世紀70 年代初,90 年代初期,隨著超大規模集成電路 (VLSI) 制造工藝技術的發展,CMOS圖像傳感器得到迅速發展。CMOS圖像傳感器將光敏元陣列、圖像信號放大器、信號讀取電路、模數轉換電路、圖像信號處理器及控制器集成在一塊芯片上,還具有局部像素的編程隨機訪問的優點。目前,CMOS圖像傳感器以其良好的集成性、低功耗、高速傳輸和寬動態范圍等特點在高分辨率和高速場合得到了廣泛的應用。
由于光電二極管不能檢測精確的顏色,顏色信息通過與濾色鏡或棱鏡結合被再現。顏色信息能通過使用紅色(R),綠色(G),藍色(B)基色濾色鏡的基色模式或者通過使用藍綠色(C),紫紅色(M),黃色(Y),綠色(G)的四色濾色鏡經過計算創建圖像的補色濾色鏡模式獲得。
總之,基色模式創建的圖像比較暗,但是由于它更高的色彩飽和度表現出更精確的顏色。這個特點即高度的色彩再現能力。
工業相機與民用相機的區別在于:
1、工業相機的快門時間非常短,可以抓拍快速運動的物體: 舉個例子,把一張名片貼在電風扇扇葉上,以最大速度旋轉,用工業相機抓拍一張圖像,能清晰的辨別名片上的字體。然而用一般的相機來拍攝,是根本不可能達到這樣效果的。
2、工業相機的圖像傳感器是逐行掃描的,而一般攝像機的圖像傳感器是隔行掃描的,甚至是隔三行掃描的:逐行掃描的圖像傳感器生產比較困難,成品率低,出貨量也少,世界上只有少數幾個公司能夠提供這類產品,例如Dalsa、Sony,而且價格昂貴。百萬級逐行掃描CCD的價格,從人民幣4000元到3萬元不等,其中的技術參數也頗為繁多。只有采用逐行掃描的圖像傳感器,才有可能清晰抓拍快速運功物體。
3、工業相機的拍攝速度遠遠高于一般相機:工業相機每秒可以拍攝十幅到幾百幅的圖片,而一般相機只能拍攝2-3幅圖像,相差甚遠。
4、工業相機輸出的是裸數據,其光譜范圍也往往比較寬,比較適合進行高質量的圖像處理算法,普遍應用于機器視覺系統中。而一般相機(DSC)拍攝的圖片,其光譜范圍只適合人眼視覺,并且經過了MPEG壓縮,圖像質量也較差。
機器視覺工作原理
機器視覺檢測系統采用CCD照相機將被檢測的目標轉換成圖像信號,傳送給專用的圖像處理系統,根據像素分布和亮度、顏色等信息,轉變成數字化信號,圖像處理系統對這些信號進行各種運算來抽取目標的機器視覺特征,如面積、數量、位置、長度,再根據預設的允許度和其他條件輸出結果,包括尺寸、角度、個數、合格 / 不合格、有 / 無等,實現自動識別功能。
機器視覺特點:
1、機器視覺是一項綜合技術,其中包括數字圖像處理技術,機械工程技術,控制技術,電光源 照明技術,光學成像技術,傳感器技術,模擬與數字視頻技術,計算機硬件技術,人機接口技術 等這些技術在機器視覺中式并列關系,相互協調 應用才能構成一個成功的工業機器視覺應用系統。
2、機器視覺更強調實用性,要求能夠適應工業生產中惡劣的環境,要有合理的性價比,要有通用的工業接口,能夠由普通工作來操作,有較高的容錯能力和安全性,不會破壞工業產品,必須有較強的通用性和可移植性。
3、對機器視覺工程師來說,不僅要具有研究數學理論和編制計算機軟件的能力,更需要的是光、機、電一體化的綜合能力。
4、機器視覺更強調實時性,要求高速度和高精度,因而計算機視覺和數字圖像處理中的許多技術目前還難以應用于機器視覺,他們的發展速度遠遠超過其在工業生產中的實際應用速度。
在設計工業機器視覺系統時,使用數字相機還是模擬相機是最重要的決定之一。二者各有其優缺點,但歸根結底要根據成本和一些關鍵操作因素來選擇,如時了這些因素,哪一項技術更有優勢就會明朗化了。對于一項應用,選擇什么樣的相機合適,取決于機器視覺系統想要達到什么目的,為機器視覺系統選擇相機時要認真考慮相機的性能和成本,雖然模擬相機遠比數字相機便宜,但它們的分辨率和圖像質量較低,所以可能會被局限在要求不太高的應用中,數字相機比模擬相機昂貴,但它們的高成本可能值得為要求高速度、高準確度、高精度的應用而付出。
機器視覺被應用于視覺檢測、物體識別、自動質量檢驗、工藝控制、參數測量和自動組裝等等許多領域。在這些系統中,相機是決定著成本、速度和精度的關鍵組件,模擬相機和數字相機都可以用在這些系統中,而了解相機的性能規格及其在各種視覺任務中的重要性,對于把機器視覺存諸工業控制是最基本的一步。
機器視覺系統包括三個主要部分:相機、采集卡、和存儲并分析圖像以提取信息的計算機(或圖像處理器)。圖像處理器和采集卡屬于相對容易選擇的電子裝置,它們的主要參數是存儲能力和處理速度。
相機是這些系統中情況最為復雜的部分,現代的模擬和數字相機采用電荷耦合器件(CCD)或互補金屬氧化物半導體(CMOS)芯片來捕獵圖像并生成電子信號發送給計算機進行處理。
CCD和CMOS芯片在內部都生成模擬信息,因此,模擬相機和數字相機之前主要區別在于圖像是在哪里被數字化的。數字相機在相機里將信號數字化,并且通過串行總線接口(比如(fireWire,USB,Camera Link,Gigabit Ethernet)將信號以數字方式傳輸給計算機(或圖像處理器)。面在另一方面,模擬相機系統并不是在其內部將圖像信號數字化(數字化是郵計算機完成的),所以,模擬信息是通過同軸電纜而進行傳輸的。
盡管兩種方法都能夠有效地傳輸信號,但模擬可能會由于工廠內其他設備的電磁干擾而造成失真,隨著噪聲水平的提高,模擬相機的動態范圍(原始信號與噪聲之比)會降低。動態范圍決定了有多少信息能夠被從相機傳輸給計算機。
數字信號不受電器聲影響,因此,數字相機的動態范圍更高,能夠向計算機傳輸更精確的信號。數字相機的典型動態范圍在55分貝到60分貝左右,而模擬相機為45分貝到50分貝左右。
所以電纜的長度和類型也影響信號的精度,模擬相機的電纜簡單而且便宜,在電噪聲導致信號嚴重失真之前能夠將信號可靠地300米以上,由于數字相機傳輸的是高帶寬信號,電纜的長度受電纜中信號良師衰減損失的水平的限制,根據使用的通信協議的不同。
LED光源的顏分主要分為四種:紅色、藍色、綠色、白色。其他顏色:橙色、紅外、紫外用戶可以根據使用環境及使用范圍的不同,選擇合適的光源種類、顏色以及照明方式,使得檢測系統達到最佳的性能,獲得最優的檢測結果。一般有紅、綠、藍、白、紅外。其中紅色用得最多,因為紅色LED成本低,并且黑白CCD 芯片對660nm光線最敏感。蘭色適合檢測物體表面質量,因為波長短。當然,紫外的散射性更好,因為波長更短。而白色是中性顏色,適合拍彩色圖片,或著被測物體的顏色在變化的。綠色的亮度很高,且波長和蘭色接近,所以有時可用綠色代替蘭色。紅外用于半透明等的物體檢測,波長越長,穿透力越強;波長越短,擴散性越好。藍色光源下,白色、紫色、藍色等表現較亮,有效反射藍光。從中也可以發現,白色,無論在什么光照下,都成成明顯的白色,是因為其本身不吸收光譜,任何光譜照射到其表面上都會被反射;相反,黑色材料則無論什么光照射上去都不反光成黑色。
另外,光的衍射中,衍射條紋的寬度與波長是成正比的,如單縫衍射中央明紋的半角寬度為sinθ=λ / a ,λ為波長,a為單縫寬度。而我們拍攝物體時,其表面通常都不是十分光滑,總是會產生衍射,所以,使用紅光時,衍射會比使用藍光時的衍射要強。因此通常用紅光能得到更多的表面細節,而使用藍光,會得到更大的對比度。
如果進行彩色成像,則通常考慮使用白色光源。白色LED光源的制造有幾種方法,一種是使用白色LED制造,發光管內部有藍色發光芯片與受到激發后發出黃色的熒光粉,發出的光按一定比例疊加到一起,看起來形成了白色,這是最為覺常見的形式。這種光源只能通過調節供電電壓或電流來改變發光強度、顏色是恒定的。另一種方法是使用紅綠藍三種不同顏色的LED,按某種順序或方式在光源上進行排列,并分別控制每種顏色的度,使用相對方便。此種方法通常使用四個單色RGGB顆粒進行排列,所以其中的綠色分量通常會比較足。我們通常所見的彩色顯示器、彩色電視機、手機屏等顯示設備,也是基于RGGB此種方式進行排列的。之所以多加一個綠色的G通量,是因為人眼對綠色光源(波長555nm)最敏感。
機器視覺應用中注意目標顏色與光源顏色的搭配。我們看到某個物體成某種顏色,是因為其反射了對應的光譜。即如果目標是紅色的,如果是白色的光照射或者是紅色的光照射,都有紅色的光返回,那么在黑白相機中將會是白色的,如果是藍色的光來拍攝,則沒有紅色的光可以反射,那么其將會是黑色的。基于這樣的理論,我們拍攝物體時,如果要將某種顏色打成白色,那么就得使用與此顏色相同或相似的光源(光的波長一樣或接近),而如果要打成黑色,則需要選擇與目標顏色波長差較大的光源。
而在鏡頭的分辨率(能分別最小兩點之間的距離)公式δ=0.61λ/NA,λ為波長,NA為數值孔徑。從中可以知道,當NA固定時,使用不同波長顏色的光時,鏡頭的分辨率是不一樣的。因此在使用光源時,同一支鏡頭在藍色光照下的分辨率通常會高于紅色光照條件。
使用機器視覺LED光源,一般都提供幾種供電方式可供選擇,常見的有5V、12V、24V直流電源,功率根據所用LED的數量多少而定,電壓不同會引起什么區別呢?這和LED的特性有關。一般LED的工作電流在10mA~25mA,特別亮的LED可達50mA甚至更高,而LED的電壓降一般為1.8V到3.3V,因此通常每個LED上都串聯一個電阻(分壓電阻),這樣才能保證LED發光均勻,而且在電壓波動時不易損毀。
那么,由于LED上的電壓降和通過的電流都是恒定的,供電電源的電壓不同時,多余的電壓是串聯的電阻所承擔的,例如給一顆1.8V、15mA的LED用24V供電時,需要串聯1.48KΩ[(24-1.8)/0.015=1480],此時電阻的功耗是0.015*0.015*1480=0.333W,如果使用多個LED顆粒組合成光源,光源會發出很高的熱量 ,這時必須采用風扇等強制散熱手段,否則光源的壽命會很短。而同樣的LED使用5V供電時,串聯電阻R=213Ω,電阻的功耗為0.048W,和24V供電時差了近7倍。這時僅僅靠對流產生的散熱效應就足夠了,不必用強制散熱的方法。
既然用低電壓有好處,為什么還使用12V、24V呢?原因很簡單,由于機器視覺用于工業生產線上,一般24V是標準配置;另外電壓高時,搞干擾能力強,而低壓則對電源和工作環境提出了更高的要求。是使用恒流源還是恒壓源,環境溫度有何影響等,均需要考慮。
常亮還是閃亮圖片亮暗的控制,除了快門、光圈、增益外,還可以控制光源的亮暗以及亮的時間來控制,我們先來看一下常亮光源和閃光的優缺點。
如果保持穩定的供電,那么光源的亮度基本不變,如果供電使用脈沖,脈沖的時間寬度和LED本身的響應時間決定了發光時間,若是這個時間小于相機快門開啟的時間,那么相機的曝光程度是由光源發出的光通量決定的,如果大于快門時間,則由快門決定。
一般情況下,如果需要頻閃光源(時間小于快門速度),傳統上使用普通的照相機閃光燈,使用LED強度不夠,所以以往針對于LED光源來講,閃光是指光源開啟時間大于快門時間的情況。
頻閃控制器,通常采用的是超電流的方法,即控制通過LED的電流超出標定的值多少倍,而使亮度增加,但是這種高負荷的工作狀態由于功率過大,發熱嚴重,對光源的壽命影響很大,所以通常通電時間都很短,減少光源的工作時間,以此來延長光源的使用時間。
使用頻閃控制器,可以獲得高亮的光源,可以減少環境的影響,可以減少快門時間從而減少動態拍攝時的拖尾現象,而且如果只需要平常的亮度時,可以使用低亮度的LED發光管,可以降低成本。
但是使用頻閃時,電源的成本會提高,而且同步問題也必須考慮,頻閃控制器可以從外部輸出觸發信號來觸發光源,也可以從外部輸出觸發信號來觸發頻閃控制器,本身輸出觸發信號同時觸發光源與相機,這樣能達到光源與相機觸發的同步。
機器視覺光源的選擇是為了將被測物體與背景盡量明顯分別,獲得高品質、高對比度的圖像。而且視覺光源的正確選擇,直接影響系統的成敗,處理精度和速度。榮旭機器視覺光源,具有亮度可調、低溫、均衡、無閃爍、無陰影,亮度、色溫一致,使用壽命長等優點。本公司致力于不斷開發新的產品和完善其功能,提供多種機器視覺光源產品,免費提供測試,并協助提供整體解決方案它已廣泛應用于各個行業。
光源的種類
視覺系統使用的光源主要有三種,高頻熒光燈、光纖鹵素燈、LED(發光二極管)照明。理想的視覺光源應該是明亮,均勻,穩定的。
高頻熒光燈:發光原理和日光燈類似,只是燈管是工業級產品,并且采用高頻電源,也就是光源閃爍的頻率遠高于相機采集圖象的頻率,消除圖像的閃爍。適合大面積照明,亮度高,且成本較低。但需要隔一定時間換燈管一定要進口的才過關,國內的高頻做的不行,老有閃爍,國外最快可做到60KHz。
光纖鹵素燈:鹵素燈也叫光纖光源,因為光線是通過光纖傳輸的,適合小范圍的高亮度照明。它真正發光的是鹵素燈炮,功率很大,可達100多瓦。高亮度鹵素燈炮,通過光學反射和一個專門的透鏡系統,進一步聚焦提高光源亮度。鹵素燈還有一個名字叫冷光源,因為通過光纖傳輸之后,出光的這一頭是不熱的。適合對環境溫度比較敏感的場合,比如二次元量測儀的照明。但它的缺點就是鹵素燈炮壽命只有2000小時左右。
LED燈:使用壽命約10000-30000小時,可以使用多個LED達到高亮度,同時可組合不同的形狀,響應速度快,波長可以根據用途選擇。
機器視覺LED光源的性能優勢
可制成各種形狀、尺寸及各種照射角度;可根據需要制成各種顏色,并可以隨時調節亮度;通過散熱裝置,散熱效果更好,光亮度更穩定;使用壽命長(約3萬小時,間斷使用壽命更長);反應快捷,可在10微秒或更短的時間內達到最大亮度;電源帶有外觸發,可以通過計算機控制,起動速度快,可以用作頻閃燈;運行成本低、壽命長的LED,會在綜合成本和性能方面體現出更大的優勢;可根據客戶的需要,進行特殊設計。
工業相機由兩大基本部件組成:圖像感光芯片和數字化的數據接口。 圖像感光芯片由數十萬至數百萬個像素組成。 像素把光線的強度轉換為電壓輸出。 這些像素的電壓被以灰度值的形式輸出,所有像素放在一起就形成了圖像,發送給計算機。 數據接口主要有USB 2.0、1394和千兆以太網三種。
CCD、CMOS是現在普遍采用的兩種圖像工藝技術,它們之間的主要差異在于傳送方式的不同。雖然CCD在影像品質、分辨率大小、靈敏度等方面優于CMOS,而CMOS具有低成本、低功耗以及高整合度的特點。隨著CCD與CMOS技術的不斷進步,兩者之間的差異將逐步減小。
1、分辨率差異:由于CMOS的每個像素都比CCD復雜,且其像素尺寸很難達到CCD的水平,因此,當我們比較相同尺寸的CCD與CMOS時,CCD的分辨率通常會優于CMOS傳感器的水平。同尺寸大小,CCD的分辨率要高于CMOS,也就是說成像質量要優于CMOS。
2、噪聲差異:由于CMOS的每個感光二極管都需要搭配一個放大器,若以百萬像素計算的話,那就需要上百萬個的放大器,然而放大器屬于模擬電路,很難讓所得的每個結果都保持一致。而CCD只需要一個放大器放在芯片邊緣,與CMOS相比,它的噪聲相對減少很多,大大提高了圖像品質。
3、靈敏度差異:因為CMOS信號是以點為單位的電荷信號,而CCD是以行為單位的電流信號,讀取信號時 CMOS是點直接讀取信號,CCD則是行間接讀取信號,因此在像素尺寸相同的情況下,CMOS的靈敏度要低于CCD。
4、耗電量差異:CMOS采用主動式圖像采集方式,感光二極管所產生的電荷會直接由旁邊的電晶體放大輸出;而CCD為被動式采集方式,必須外加12~18V的電壓以使每個像素中的電荷移送到傳輸通道。因此CCD就必須設計更精密的電源線路和耐壓強度,這樣使得CCD的耗電量遠遠高出CMOS,根據計算CMOS的耗電量僅是CCD的1/8~1/10。
5、成本差異:由于CMOS與現有的大規模集成電路生產工藝相同,可以一次全部整合周邊設施到傳感器芯片中,大大節省了外圍芯片的成本;而CCD采用電荷傳遞的方式輸出數據,只要其中有一個像素傳送出現故障,就會導致一整排的數據無法正常傳送,因此控制CCD的成品率比CMOS困難許多,因此,CCD的制造成本就相對高于CMOS傳感器。
印刷包裝行業品種繁多,印刷品顏色與形狀多樣。部分產品的材質具有極高的反射度并且表面印制了彩色圖案。如:易拉罐瓶蓋的綜合檢測一直存在著打光難的問題。因此對產品的檢測要求都是十分嚴格。運用機器視覺技術,能迅速準確的發現印刷品的各種缺陷。
機器視覺用于印刷行業中的質量檢測,其基本的工作原理是用攝像機拍攝(采集)印刷品上的圖像,在計算機中與該印品的標準圖像(模板)相匹配比較,如果發現差異并超出設定的公差范圍,即判定為不合格產品。
采用檢測系統進行質量檢測可以提供檢測全過程的實時報警和詳盡、完善的分析報告外,現場操作者還可以根據全自動檢測系統的實時報警及分析報告,對工作中出現的問題進行相應的調整。并且管理者還可以依據檢測結果的分析報告,對生產過程進行跟蹤,更有利于生產技術的管理。也就是說,質量檢測設備不僅可以提升成品的合格率,還能夠協助生產商改進工藝流程,建立質量管理體系,達到一個長期穩定的質量標準。 檢測印刷制品顏色缺陷檢測(如露印檢測、淺印檢測、偏色檢測、露白檢測等);材質缺陷檢測(如孔洞檢測、異物檢測);印刷缺陷檢測(如殘缺檢測、刀絲檢測、飛墨檢測、露印檢測、套印誤差檢測);二維碼缺陷檢測(如重號檢測、偏位檢測、不匹配檢測等)。
遠心工業鏡頭主要是為糾正傳統工業鏡頭的視差而特殊設計的鏡頭,它可以在一定的物距范圍內,使得到的圖像放大倍率不會隨物距的變化而變化,這對被測物不在同一物面上的情況是非常重要的應用。
普通工業鏡頭目標物體越靠近鏡頭(工作距離越短),所成的像就越大。在使用普通鏡頭進行尺寸測量時,會存在如下問題:
1、由于被測量物體不在同一個測量平面,而造成放大倍率的不同;
2、鏡頭畸變大
3、視差也就是當物距變大時,對物體的放大倍數也改變
4、鏡頭的解析度不高;
5、由于視覺光源的幾何特性,而造成的圖像邊緣位置的不確定性。

?
而遠心鏡頭就可以有效解決普通鏡頭存在的上述問題,而且沒有此性質的判斷誤差,因此可用在高精度測量、度量計量等方面。遠心鏡頭是一種高端的工業鏡頭,通常有比較出眾的像質,特別適合于尺寸測量的應用。
無論何處,在特定的工作距離,重新調焦后會有相同的放大倍率,因為遠心鏡頭的最大視場范圍直接與鏡頭的光欄接近程度有關,鏡頭尺寸越大,需要的現場就越大。遠心測量鏡頭能提供優越的影像質素,畸變比傳統定焦鏡頭小,這種光學設計令影像面更對稱,可配合軟件進行精密測量 。
普通鏡頭優點:成本低,實用,用途廣。
普通鏡頭缺點:放大倍率會有變化,有視差。
普通鏡頭應用:大物體成像。
遠心鏡頭的優點:放大倍數恒定,不隨景深變化而變化,無視差。
遠心鏡頭的缺點:成本高,尺寸大,重量重。
遠心鏡頭的應用:度量衡方面,基于CCD方面的測量,微晶學
鏡頭的焦距分為像方焦距和物方焦距。像方焦距是像方主面到像方焦點的距離,同樣,物方焦距就是物方主面到物方焦點的距離。
是像方焦距,入射光線為平行線時通過透鏡光線的交點到透鏡的距離.當點光源距透鏡某一距離時折射光線為平行線,這個距離叫物方焦距。
物方遠心鏡頭及像方遠心鏡頭介紹
在測量系統中,物距常發生變化,從而使像高發生變化,所以測得的物體尺寸也發生變化,即產生了測量誤差;另一方面,即使物距是固定的,也會因為CCD敏感表面不易精確調整在像平面上,同樣親會產生測量誤差。為了解決上述問題,可以采用遠心鏡頭。其中像方遠心鏡頭可以消除物距變化帶來的測量誤差,而物方遠心鏡頭則可以消除CCD位置不準帶來的測量誤差。
1)物方遠心鏡頭
物方遠心鏡頭是將孔徑光闌放置在光學系統的像方焦平面上,圖1示出,當孔徑光闌放在像方焦平面上時,即使物距發生改變,像距也發生改變,但像高并沒有發生改變,即測得的物體尺寸不會變化;圖2清楚地顯示出物方遠心光路的原理,其中孔徑光闌位于像方焦面上,物方主光線平行于光軸。如果物體B1B2正確地位于與CCD表面M共軛的位置A1上,那么它在CCD表面上的像為M1M2。如果由于物距改變,物體B1B2不在位置A1而在位置A2,那么它的像B′1B′2偏離CCD表面,B′1和B′2點在CCD表面上投影為一個彌散斑,其中心仍為M1和M2點,按此投影像讀出的長度仍為M2M1。這就是說,上述物距改變并不影響測量精度。

?

?
2)像方遠心光路
像方遠心光路是將孔徑光闌放置在光學系統的物方焦平面上,而像方的主光線平行于光軸。如圖3所示。如果物體B1B2的像B′1B′2不與CCD表面M重合,則在CCD表面M上得到的是B′1B′2的投影像,其散斑中心距離M1M2=B′1B′2。因此,不管CCD表面M是否和B′1B′2相重合,它和標尺所對應的長度總是B1B2,所以沒有測量誤差。

?
雙側遠心鏡頭
曝光時間
Exposure time
為了將光投射到照相感光材料的感光面上,快門所要打開的時間。視照相感光材料的感光度和對感光面上的照度而定。
相機曝光時間是指從快門打開到關閉的時間間隔,在這一段時間內,物體可以在底片上留下影像曝光時間是看需要而定的,沒有長短好壞的說法只有需要的講法。比如你拍星星的軌跡,就需要很長的曝光時間(可能是幾個小時),這樣星星的長時間運動軌跡就會在底片上成像。如果你要拍飛馳的汽車清晰的身影就要用很短的時間(通常是幾千分之一秒)。 曝光時間長的話進的光就多,適合光線條件比較差的情況。曝光時間短則適合光線比較好的情況。有的是0.04ms—93ms,有的是1/71000s—2s,有的是1/7000s—7s等等
曝光時間主要是指底片的感光時間,曝光時間越長底片上生成的相片越亮,相反越暗。在外界光線比較暗的情況下一般要求延長曝光時間(比如說夜景)。
1. 分辨率(Resolution):相機每次采集圖像的像素點數(Pixels),對于數字相機機一般是直接與光電傳感器的像元數對應的,對于模擬相機機則是取決于視頻制式,PAL制為768*576,NTSC制為640*480。
2. 像素深度(Pixel Depth):即每像素數據的位數,一般常用的是8Bit,對于數字相機機一般還會有10Bit、12Bit等。
3. 最大幀率(Frame Rate)/行頻(Line Rate):相機機采集傳輸圖像的速率,對于面陣相機機一般為每秒采集的幀數(Frames/Sec.),對于線陣相機為每秒采集的行數(Lines/Sec.)。
4. 曝光方式(Exposure)和快門速度(Shutter):對于線陣相機機都是逐行曝光的方式,可以選擇固定行頻和外觸發同步的采集方式,曝光時間可以與行周期一致,也可以設定一個固定的時間;面陣相機機有幀曝光、場曝光和滾動行曝光等幾種常見方式,數字相機一般都提供外觸發采圖的功能。快門速度一般可到10微秒,高速相機機還可以更快。
5. 像元尺寸(Pixel Size):像元大小和像元數(分辨率)共同決定了相機機靶面的大小。目前數字相機機像元尺寸一般為3μm-10μm,一般像元尺寸越小,制造難度越大,圖像質量也越不容易提高。
6. 光譜響應特性(Spectral Range):是指該像元傳感器對不同光波的敏感特性,一般響應范圍是350nm-1000nm,一些相機機在靶面前加了一個濾鏡,濾除紅外光線,如果系統需要對紅外感光時可去掉該濾鏡。
?
工業鏡頭倍率及視場范圍的計算方法
一、工業鏡頭光學放大倍率的計算方法

?
二、工業鏡頭對應視場范圍的計算方法

?
附:常見工業相機傳感器尺寸大小
1/4″:3.2mm×2.4mm;
1/3″:4.8mm×3.6mm;
1/2″:6.4mm×4.8mm;
2/3″:8.8×6.6mm;
1″:12.8mm×9.6mm
機器視覺系統中,工業鏡頭相當于人的眼睛,其主要作用是將目標的光學圖像聚焦在圖像傳感器(相機)的光敏面陣上。視覺系統處理的所有圖像信息均通過工業鏡頭得到,工業鏡頭的質量直接影響到視覺系統的整體性能。下面對機器視覺工業鏡頭的相關專業術語做以詳解。

?
一、遠心光學系統:
指主光線平行于工業鏡頭光學軸的光學系統。而光從物體朝向鏡頭發出,與光學軸保持平行,甚至在軸外同樣如此,則稱為物體側遠心光學系統。

?
二、遠心鏡頭:
遠心鏡頭指主光線與鏡頭光源平行的工業鏡頭。有物方遠心,像方遠心,雙側遠心。
普通工業鏡頭

主光線與鏡頭光軸有角度,因此工件上下移動時,像的大小有變化。
?
雙側遠心境頭

主物方,像方均為主光線與光軸平行
光圈可變,可以得到高的景深,比物方遠心境頭更能得到穩定的像
最適合于測量用圖像處理光學系統,但是大型化成本高
?
物方遠心境頭
只是物方主光線與鏡頭主軸平行
工件上下變化,圖像的大小基本不會變化
使用同軸落射照明時的必要條件,小型化亦可對應
像方遠心境頭
只是像方主光線與鏡頭光軸平行
相機側即使有安裝個體差,也可以吸收攝影倍率的變化
用于色偏移補償,攝像機本應都采用這種鏡頭
三、遠心光學系統的特色:

優點:更小的尺寸。減少鏡頭數量,可降低成本。
缺點:上下移動物體表面時,會改變物體尺寸或位置。
?
優點:上下移動物體表面時,不會改變物體尺寸或位置。使用同軸照明時。可使用更小的尺寸
缺點:未使用同軸照明時,大于標準鏡頭的尺寸
四、遠心:
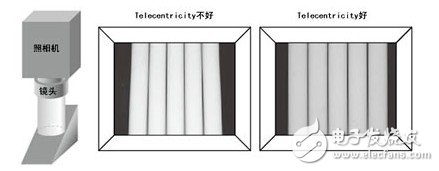
遠心度是指物體的倍率誤差。倍率誤差越小,遠心度越高。遠心度有各種不同的用途,在鏡頭使用前,把握遠心度很重要。遠心鏡頭的主光線與鏡頭的光軸平行,遠心度不好,遠心鏡頭的使用效果就不好;遠心度可以用下圖進行簡單的確認。
?
五、分辨率(μm):
光學系能力的尺度,表示黑白格狀圖案通過鏡頭觀察時,1mm中可以分辨觀察到黑白條紋的最多對數。分辨率為兩點間在無法識別前,能靠近的最近距離測量值,例如1μm的分辨率代表兩點間在無法識別前,能靠近的最近距離為1μm。以下為根據鏡頭的無相差光衍射情況計算理論分辨率的公式。

?
六、分辨力(Lines/mm):
分辯力指黑白網線圖鏡頭里影像內1mm面積,可識別的黑白兩色條紋數。分辨力的單位為線條/mm,例如100線條/mm代表可識別黑白間距1/100mm(10μm)。黑白線條的寬度為1/200mm(5μm)。
七、水平TV分辨率(TV線條):
寬度里的黑白水平線總條數,相當于電視機屏幕垂直高度的高度值。屏幕的垂直與水平長度比率通常為3:4,因此水平寬度里的總條數為3/4。電視機水平分辨率為240TV條線,電視機屏幕水平寬度的總條數為320條線。測量鏡頭的分辨率時,一組黑色與白色線條應視為一條線,但是在電視機分辨率線條方面,一組視為2TV線條。
八、失真(%):
失真為光學軸外的直型物體,呈現曲線時的鏡頭像差。鏡頭失真也稱為鏡頭畸變,即光學透鏡固有的透視失真的總稱,可分為枕形失真和桶形失真,直線朝向中心的失真情況為枕形失真(Pincushion Distortion),向外擴張的失真稱為桶形失真(Barrel Distortion)。如下圖示:

?
九、TV失真(%):
TV屏幕上的影像失真。數值越接近零,牲能越高。

?
十、電視失真:
實際邊長的歪曲形狀與理想的形狀的百分比算出的值。
十一、孔徑效率邊際光量(%):
孔徑效率為使用鏡頭拍攝均勻亮度的物體時,成像盤光學軸與四周區域之間的亮度差異,單位為百分比(%),假設中央亮度為100,為鏡頭的光學特征之一。
十二、遮蔽(%):
遮蔽為使用鏡頭與CCD-TV鏡頭拍攝均勻亮度的物體時,電視機屏幕中央與邊緣之間的亮度差異,單位為百分比(%)。通常使用受光組件與CCD組件的功率比計算此百分比。遮蔽意指鏡頭與TV鏡頭的整體表現,可使用遠心光學系統以縮小遮蔽的情況。
十三、色差:
在鏡頭光學統中,形成影像的位置與影像放大倍率隨光線波長的不同而不同。不同波長的光線有不同的顏色,這叫做色彩失真。光學軸上的失真叫做色彩失真。放大倍率的差異則叫做放大倍率色彩失真。
十四、工作距離(WD)(mm):
工作距離指鏡頭第一個工作面到被測物體的距離。
十五、物像間距離O/I(Object to Imager)
OI指物體到結像平面的距離。
十六、焦距f(mm)后焦距/前焦距
焦距為光學系統的主光點到焦點的距離。從最后一片鏡頭的頂點到后焦點的距離,為后焦距。從第一片鏡頭的頂點到前焦點的距離,為前焦距。

?
十七、景深:
深度為與物體從最佳焦點前后移動時.出現最銳利焦點的最近點與最遠點之間的距離。物體側的深度范圍稱為景深。同樣,照相機側的范圍稱為焦點深度。具體的景深的值多少略有不同。景深(Depth of Field)可以用以下的計算式計算出來:
景深 = 2 x Permissible COC x 實效F / 光學倍率2 = 允許誤差值 / (NA x 光學倍率)(使用的是0.04mm的Permissible COC)
通過鏡頭的影像理論土會形成點狀。清晰影像上出現可接受的摸糊情況,稱為可接受的彌散圓。

?
十八、焦深:
深度為當CCD從最佳焦點前后移動時,出現最銳利焦點的最近點與最遠點之間的距離。影像側的深度范圍稱為焦深。
十九、后截距(mm):
從鏡頭安裝座盤前端到影像的距離。
二十、C安裝座規格:
名稱?標準外徑?螺絲螺紋數(25.4mm用)?后截距?
U1?25.4000mm?32Threads?17.526mm
二十一、數值孔徑 NA,NA':
當物體在入射光孔上產生的半角為u,且折射率為n,n x sinu為物體側數值孔經(NA)。
當物體在出射光孔上產生的半角為u',且折射率為n',n' x sinu' 為影像側數值孔徑{NA')。
NA=n x sinu NA'=n' x sin u'
NA越高,鏡頭的分辨率與亮度越佳。如下圖所示 入射角度 u, 物體側折射率n, 成像側的折射率' n':NA = NA' x 放大率

對于Macro鏡頭,NA =M/2 xF NA' = 1/2 xF NA=NA' x光學倍率 NA'=NA x光學倍率
二十二、F值F No:
此值指鏡頭的亮度。將鏡頭對焦距離除以物體側的有效直徑(入射光孔直徑Dmm),即可得到此數值,也可使用NA與鏡頭的光學放大倍率(β)計算。數值越小,鏡頭越明亮。
F No=焦距/入射孔徑或有効口徑=f/D
二十三、有效F No:
此值為具體在有限距離內的鏡頭亮度,指實際操作時的亮度。光學放大倍率越高(β),鏡頭越暗。
實效F = (1 +光學倍率) x F#,實效F = 光學倍率 / 2NA
二十四、光學放大倍率β:
物體尺寸與影像尺寸的比例。
β
=y'/y
=b/a
=NA/NA'
=CCD鏡頭元件尺寸/視野實際尺寸
二十五、光學倍率:
放大倍率(Magnification)指的是通過鏡頭的調整能夠改變拍攝對象原本成像面積的大小。光學倍率就是通過光學鏡頭變倍的放大倍率。主要點與成像的關系:放大率是指成像大小與物體的比。

?
二十六、電子放大倍率:
電子放大倍率為影像在顯示器屏幕上顯示時與在CCD上顯示相比的放大倍率。
二十七、顯示器放大倍率:
顯示器放大倍率為通過鏡頭在顯示器呈現物體的放大倍率。
顯示器放大倍率=(光學放大倍率β) x (電子放大倍率)
(計算范例) 光學放大倍率=02x,CCD尺寸1/2"(對角線8mm),顯示器1/4":
電子放大倍率=14 x25.4/8=44.45
顯示器放大倍率=0.2x44.45=8.89(倍) (1英寸=25.44mm)

※有時根據TV監視器的掃描狀態,以上的簡易計算將有一些變化。
?
二十八、視野(FOV):
視野指使用照相機以后看到的物體側的范圍。
照相機有效區域的縱向長度(V)/光學倍率(M)=視野(V)
照相機有效區域的橫向長度(H)/光學倍率(M)=視野(H)
照相機有效區域的縱向長度(V)or(H)=照相機一個畫素的尺寸×有効畫素數(V)or(H)來計算。
(計算范例) 光學放大倍率=0.2x,CCD尺寸1/2"(長4.8mm,寬6.4mm}:
視野尺寸 長度=4.8/0.2=24(mm)
寬度=6.4/0.2=32{mm)
二十九、解析度:
表示了所能見到了2點的間隔0.61x 使用波長(λ)/ NA=解析度(μ),以上的計算方法理論上可以計算出解析度,但不包括失真。※使用波長為550nm
三十、解像力:
1mm中間可以看到黑白線的條數。單位(lp)/mm
三十一、MTF(Modulation Transfer Function):
成像時再現物體表面的濃淡變化而使用的空間周波數和對比度。
三十二、成像圈:
成像尺寸φ,要輸入相機感應器尺寸。
三十三、照相機 Mount:
C-mount: 1" diameter x 32 TPI: FB: 17.526mm,CS-mount: 1" diameter x 32 TPI: FB: 12.526mm,F-mount: FB:46.5mm,M72-Mount: FB 廠家各有不同。
三十四、邊緣亮度:
相對照度是指中央的照度與周邊的照度的百分比。
三十五、通風盤及解析度:
Airy Disk(通風盤)是指通過沒有失真的鏡頭在將光集中一點時,實際上形成的是一個同心圓。這個同心圓就叫做Airy Disk。Airy Disk的半徑r可以通過以下的計算公式計算出來。這個值稱為解析度。r= 0.61λ/NA Airy Disk的半徑隨波長改變而改變,波長越長,光越難集中于一點。 例:NA0.07的鏡頭 波長550nm r=0.61*0.55/0.07=4.8μ

?
三十六、 MTF 及解析度:
MTF(Modulation Transfer Function) 是指物體表面的濃淡變化,成像側也被再現出來。表示鏡頭的成像性能,成像再現物體的對比度的程度。測試對比性能,用的是具有特定空間周波數的黑白間隔測試。空間周波數是指1mm的距離濃淡變化的程度。
圖1所示,黑白矩陣波,黑白的對比度為100%.這個對象被鏡頭攝影后,成像的對比度的變化被定量化。基本上,不管什么鏡頭,都會出現對比度降低的情況。最終對比度降低至0%。,不能進行顏色的區別。

?
圖2、圖3顯示了物體側與成像側的空間周波數的變化。橫軸表示空間周波數,縱軸表示亮度。物體側與成像側的對比度由A、B計算出來。MTF由A,B的比率計算出來。
解析度與MTF的關系:解析度是指2點之間怎樣被分離認識的間隔。一般從解析度的值可以判斷出鏡頭的好壞,但是實際是MTF與解析度有很大的關系。圖4顯示了兩個不同鏡頭的MTF曲線。鏡頭a 解析度低但是具有高對比度。鏡頭b對比度低但是解析度高。

?
三十七、微距鏡頭:
不用近接環或特寫鏡頭而實現擴大攝影,為近接攝影而設計的鏡頭,有限遠(=從物鏡出射的光,在一定距離處聚焦)
三十八、CCTV鏡頭:
適合于廣范圍的擴大觀察,需要嚴格精度時不適合,無限遠(=從物鏡出射的光,不聚焦,平行前進)
三十九、變倍鏡頭:
焦距可變鏡頭,倍率,攝像范圍等可以簡單改變。適合于需要尋找最合適攝影條件(攝影距離,鏡頭的焦距)以便于操作的場合使用。不產生聚焦位置移動的稱為變倍鏡頭,產生焦距位置移動的稱為變焦鏡頭。
四十、成像圓:
光學系統中成像圓的尺寸,成像圓的尺寸=CCD對角尺寸,和CCD尺寸同樣意義。
四十一、后變倍鏡頭:
安裝在CCD前面,不改變工作距離,擴大視野范圍。F值下降,分辨率、對比度下降,聚焦會有些不準。
四十二、前變倍鏡頭:
安裝在鏡頭前面,工作距離會變化,亮度不變,擴大視野范圍。















 工商網監
工商網監
評論