4.0電機(jī)參數(shù)的含義及測(cè)量方法1.首先給出workbench中設(shè)置電機(jī)參數(shù)的兩張圖片:根據(jù)workbench中對(duì)電機(jī)需要的參數(shù)來(lái)看,作如下的整理翻譯及解釋2.Magnetic structure
2021-06-29 08:20:45
步進(jìn)電機(jī)中的力矩(g.cm),轉(zhuǎn)矩(n.m),扭矩(kg.m)有什么區(qū)別?步進(jìn)電機(jī)中的力矩(g.cm),轉(zhuǎn)矩(n.m),扭矩(kg.m)有什么區(qū)別?力矩、轉(zhuǎn)矩和扭矩在步進(jìn)電機(jī)中其實(shí)就是一樣
2021-09-15 06:01:52
步進(jìn)電機(jī)力矩的怎么計(jì)算?步進(jìn)電機(jī)力矩計(jì)算方法。選擇步進(jìn)電機(jī)時(shí),首先要保證步進(jìn)電機(jī)的輸出功率大于負(fù)載所需的功率。在選用功率步進(jìn)電機(jī)時(shí),首先要計(jì)算機(jī)械系統(tǒng)的負(fù)載轉(zhuǎn)矩,電機(jī)的矩頻特性能滿足機(jī)械負(fù)載并有一定
2021-09-03 07:16:10
輕松降低步進(jìn)電機(jī)的溫度。抑制溫度上升的方法:選用轉(zhuǎn)矩較為充裕的電機(jī)并降低運(yùn)行電流通過(guò)降低運(yùn)行電流可有效抑制發(fā)熱,但相應(yīng)的輸出轉(zhuǎn)矩也會(huì)降低,需要在選型時(shí)對(duì)轉(zhuǎn)矩預(yù)留一定的余量。選用高效率型步進(jìn)電機(jī)高效率型步進(jìn)電機(jī)通過(guò)材質(zhì)的最佳化,大幅降低損耗,發(fā)熱也得以減少。可以幫助工廠實(shí)現(xiàn)空間節(jié)省以及提升裝...
2021-07-08 07:21:56
步進(jìn)電機(jī)噪聲大的原因,步進(jìn)電機(jī)的特性測(cè)量和噪音和振動(dòng)的測(cè)量,步進(jìn)電機(jī)基礎(chǔ)(6.2)-步進(jìn)電機(jī)的特性測(cè)量方法-暫態(tài)(阻尼)特性的測(cè)量前言基本信息前言說(shuō)明6.4 暫態(tài)(阻尼)特性的測(cè)量6.5 噪音和振動(dòng)
2021-07-08 09:03:40
步進(jìn)電機(jī)基礎(chǔ)(3.1)-步進(jìn)電機(jī)的原理與特性之基礎(chǔ)理論前言基本信息公式前言說(shuō)明步進(jìn)電機(jī)的原理與特性之基礎(chǔ)理論3. 1 基礎(chǔ)理論1. 轉(zhuǎn)矩的產(chǎn)生及負(fù)載角1) PM型電機(jī)的轉(zhuǎn)矩及負(fù)載角2) VR型電機(jī)
2021-06-30 07:21:55
,使得轉(zhuǎn)子在一個(gè)整步中的不同位置(64細(xì)分等)靜態(tài)指標(biāo)術(shù)語(yǔ):相數(shù):相數(shù)越多,步距角越小拍數(shù):指電機(jī)轉(zhuǎn)過(guò)一個(gè)齒輪角所需脈沖數(shù)步距角:一個(gè)脈沖信號(hào)所對(duì)應(yīng)電機(jī)轉(zhuǎn)動(dòng)的角度定位轉(zhuǎn)矩:電機(jī)在不通電狀態(tài)下,電機(jī)轉(zhuǎn)子自身的鎖定力矩靜轉(zhuǎn)矩:電機(jī)在額定靜態(tài)電壓作用下,電機(jī)不作旋轉(zhuǎn)運(yùn)動(dòng)時(shí),電機(jī)轉(zhuǎn)軸的鎖定力矩,動(dòng)態(tài)...
2021-06-30 07:11:45
步進(jìn)電機(jī)基礎(chǔ)(8.1)-步進(jìn)電機(jī)的問(wèn)題解決方案-增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法前言基本信息前言說(shuō)明8.1 增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法1 . 步進(jìn)電機(jī)在低速時(shí)增加轉(zhuǎn)矩的方法1) 選擇步距角小的步進(jìn)電機(jī)2) 雙極型
2021-07-07 07:29:39
我是剛剛接觸步進(jìn)電機(jī),想知道步進(jìn)電機(jī)有哪些特性,我公司是賣步進(jìn)電機(jī)和德國(guó)MEYLE編碼器,我一直不會(huì)區(qū)分兩種產(chǎn)品的特性和功能。求助大神幫忙解說(shuō)?
2014-06-16 14:53:30
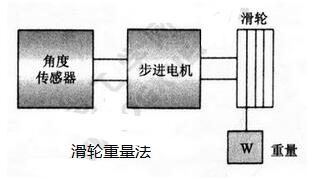
步進(jìn)電機(jī)基礎(chǔ)(6.1)-步進(jìn)電機(jī)的特性測(cè)量方法-靜態(tài)特性前言基本信息前言說(shuō)明說(shuō)明6.1 靜態(tài)特性1 . 靜態(tài)轉(zhuǎn)矩特性2. 靜 態(tài) 轉(zhuǎn) 矩 特 性 測(cè) 量1.轉(zhuǎn)矩表:2. 滑輪重量法:3. 應(yīng)力計(jì)
2021-07-07 07:28:34
步進(jìn)電機(jī)基礎(chǔ)(6.2)-步進(jìn)電機(jī)的特性測(cè)量方法-動(dòng)態(tài)特性的測(cè)量法前言基本信息前言說(shuō)明6.1 靜態(tài)特性1 . 滑輪平衡法前言基本信息名稱描述說(shuō)明教材名稱步進(jìn)電機(jī)應(yīng)用技術(shù)作者坂本正文譯者王自強(qiáng)前言
2021-07-08 07:46:31
步進(jìn)電機(jī)的轉(zhuǎn)矩為什么會(huì)隨著速度增大而降低?
2023-11-03 07:58:59
步進(jìn)電機(jī)的原理與特性之基本特性 相關(guān)資料分享,步進(jìn)電機(jī)基礎(chǔ)(3.2)-步進(jìn)電機(jī)的原理與特性之基本特性前言基本信息公式前言說(shuō)明基本特性1. 靜態(tài)轉(zhuǎn)矩特性2. 動(dòng)態(tài)轉(zhuǎn)矩特性1) 脈沖頻率-轉(zhuǎn)矩特性2
2021-07-08 08:27:07
一般在步進(jìn)電機(jī)的書(shū)里面說(shuō)的大多是這樣的:隨著步進(jìn)電機(jī)的脈沖頻率增大,轉(zhuǎn)矩變小。但是都沒(méi)有具體說(shuō)數(shù)學(xué)關(guān)系,有沒(méi)有公式之類的描述?
2016-01-18 09:34:00
步進(jìn)電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩是什么關(guān)系?轉(zhuǎn)速高低對(duì)轉(zhuǎn)矩的影響?
2023-12-12 07:00:21
。【步進(jìn)電機(jī)選型總則】1、首先要保證步進(jìn)電機(jī)的輸出功率大于負(fù)載所需的功率。而在選用功率步進(jìn)電機(jī)時(shí),首先要計(jì)算機(jī)械系統(tǒng)的負(fù)載轉(zhuǎn)矩,電機(jī)的矩頻特性能滿足機(jī)械負(fù)載并有一定的余量保證其運(yùn)行可靠。在實(shí)際工作
2018-10-12 09:50:49
測(cè)量高速信號(hào)快速的、比較干凈的測(cè)量方法是什么
2021-05-07 07:13:16
測(cè)量方法的分類1) 直接測(cè)量與間接測(cè)量(1) 直接測(cè)量直接測(cè)量是直接得到被測(cè)量值的測(cè)量方法。例如用直流電壓表測(cè)量穩(wěn)壓電源的輸出 電壓等。(2) 間接測(cè)量與直接測(cè)量不同,間接測(cè)量是利用直接測(cè)量的量與被
2017-06-15 10:08:31
究竟什么是特性阻抗? 特性阻抗的基本性質(zhì)、計(jì)算和測(cè)量方法是什么?
2021-04-21 06:24:01
LED亮度調(diào)節(jié)、電機(jī)轉(zhuǎn)速控制等。而在某些特殊應(yīng)用中,我們也需要通過(guò)測(cè)量輸入PWM的占空比,來(lái)實(shí)現(xiàn)不同的輸出控制,這就需要使用到PWM占空比的測(cè)量方法。這里介紹三種不同的測(cè)量方法:阻塞方式、中斷方式以及定時(shí)器捕獲功能。
2021-02-03 07:52:09
某3相步進(jìn)電機(jī)的矩頻特性曲線所謂矩頻特性曲線,是指步進(jìn)電機(jī)扭矩與輸入信號(hào)頻率關(guān)系的曲線,其實(shí)相當(dāng)于其他電機(jī)如伺服電機(jī)的轉(zhuǎn)矩-轉(zhuǎn)速特性曲線。從曲線上可以看出,隨著輸入頻率的升高,步進(jìn)電機(jī)扭矩下降很快
2016-01-18 14:07:53
(J)、轉(zhuǎn)矩常數(shù)、摩擦系數(shù)等。其中機(jī)械參數(shù)往往難以測(cè)量,通常在調(diào)試過(guò)程中確定,本文主要介紹電氣參數(shù)最常用、最簡(jiǎn)單的測(cè)量方法。2.數(shù)學(xué)模型永磁同步電機(jī)的電壓方程、磁鏈方程和力矩方程如圖1所示。3.轉(zhuǎn)子極
2022-10-12 15:31:27
什么叫步進(jìn)電機(jī)的牽入轉(zhuǎn)矩(pull in torque)?答:動(dòng)態(tài)力矩,即在一定步進(jìn)速率下電機(jī)所產(chǎn)生的力矩。動(dòng)態(tài)力矩一般由PULL IN(牽入)力矩或PULL OUT(牽出)力矩所表示。PULL
2021-07-07 07:34:28
步進(jìn)電機(jī)基礎(chǔ)(8.3)-步進(jìn)電機(jī)的問(wèn)題解決方案-改善暫態(tài)特性的解決方法前言基本信息前言說(shuō)明8.3 改善暫態(tài)特性的解決方法1. 利用阻尼器的改善2 . 利用驅(qū)動(dòng)電路的改善(1) 半步進(jìn)1-2相激磁
2021-07-07 06:27:00
的步進(jìn)角,給一個(gè)脈沖,它就轉(zhuǎn)動(dòng)一個(gè)步進(jìn)角,于是它取名:步進(jìn)電機(jī)第二個(gè)問(wèn)題:步進(jìn)電機(jī)的特性?在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收...
2021-07-08 10:01:44
什么是SPWMSPWM示波器的測(cè)量方法
2021-03-29 08:29:26
系統(tǒng)檢測(cè)過(guò)程中,需要運(yùn)用到各種各樣的傳感器,傳感器的測(cè)量方法以及性能是檢測(cè)任務(wù)是否能夠順利完成的關(guān)鍵性因素。在實(shí)際操作過(guò)程中,需針對(duì)不同的檢測(cè)目的和具體情況進(jìn)行分析,然后找出切實(shí)可行的測(cè)量方法,再
2018-11-07 16:20:22
倍速鏈輸送具有哪些優(yōu)點(diǎn)?伺服電機(jī)和步進(jìn)電機(jī)的控制方式有何區(qū)別?伺服電機(jī)和步進(jìn)電機(jī)的過(guò)載特性有何區(qū)別?
2021-10-11 06:31:15
請(qǐng)問(wèn)大俠們,伺服電機(jī)的 “堵轉(zhuǎn)轉(zhuǎn)矩”是什么意思,是最大轉(zhuǎn)矩的意思么?我選型的時(shí)候是根據(jù) “額定轉(zhuǎn)矩”還是“堵轉(zhuǎn)轉(zhuǎn)矩”來(lái)選呢?然后 電機(jī)的 “靜態(tài)電流”是什么意思?說(shuō)要根據(jù) 電機(jī) 的“靜態(tài)電流”來(lái)選擇電機(jī)模塊,如何解釋啊?
2023-12-11 07:01:07
到切實(shí)可行的方式。器的測(cè)量方法按手段分類有:直接測(cè)量、間接測(cè)量和組合測(cè)量、按測(cè)量方式分類有:微差式、偏差式和零位式測(cè)量。按測(cè)量精度分類有:等精度和非等精度測(cè)量。按變化情況分類有:動(dòng)態(tài)、靜態(tài)測(cè)量。按敏感元件
2018-11-08 15:32:35
接地電阻的測(cè)量方法有哪幾種?接地電阻的計(jì)算方法有那幾種?
2021-04-09 06:05:08
來(lái)自MPS的科普視頻,介紹了一些最基本的紋波測(cè)量方法,歡迎探討交流! ...
2022-01-03 07:19:18
系統(tǒng)的采樣速率要高(建議3K以上),能實(shí)現(xiàn)動(dòng)態(tài)轉(zhuǎn)矩測(cè)量;3) 要求轉(zhuǎn)矩檢測(cè)儀器能夠進(jìn)行數(shù)據(jù)處理。二、步進(jìn)電機(jī)的靜態(tài)測(cè)量方法測(cè)量齒槽轉(zhuǎn)矩圖示3:使用步進(jìn)電動(dòng)機(jī)的靜態(tài)測(cè)量方法示意圖 如圖3所示,將步進(jìn)
2018-11-01 11:13:11
永磁電機(jī) 磁鏈測(cè)量方法(反電勢(shì)法)需要讓永磁電機(jī)勻速旋轉(zhuǎn)(維持一個(gè)電周期的勻速就好了)。取永磁電機(jī)旋轉(zhuǎn)時(shí)的反電動(dòng)勢(shì)轉(zhuǎn)速這兩個(gè)的單位非常重要,按實(shí)際測(cè)量的話,反電動(dòng)勢(shì)一般是線電壓,取它
2021-08-31 06:14:17
使用就可能會(huì)在測(cè)試過(guò)程中被損壞。在選擇測(cè)量方法時(shí),應(yīng)首先考慮被測(cè)量本身的特性、所處的環(huán)境條件、所需要的精確程度以及所具有的測(cè)量設(shè)備等因素,綜合考慮后正確地選擇測(cè)量方法、測(cè)量設(shè)備并編制合理的測(cè)量程序,才能順利
2009-03-20 09:53:50
請(qǐng)問(wèn)電機(jī)參數(shù)的含義及測(cè)量方法是什么?
2021-10-19 08:54:17
pwm占空比會(huì)影響步進(jìn)電機(jī)的轉(zhuǎn)矩嗎?
2023-06-25 07:13:27
什么是混合伺服?閉環(huán)步進(jìn)電機(jī)的基本特性有哪些?
2021-10-09 06:09:11
電氣照明和類似設(shè)備的無(wú)線電騷擾特性的限值和測(cè)量方法
2007-11-10 09:54:46 12
12 電機(jī)的轉(zhuǎn)矩和轉(zhuǎn)速是最重要的兩個(gè)參數(shù),對(duì)它們的測(cè)量必須準(zhǔn)確。根據(jù)用戶提出的測(cè)量航空電機(jī)具體要求,本文分析了轉(zhuǎn)矩和轉(zhuǎn)速的測(cè)量原理,指出了采用應(yīng)變式和光電式傳感器構(gòu)成測(cè)
2009-07-07 08:48:5939 模擬測(cè)量方法和數(shù)字測(cè)量方法:高內(nèi)阻回路直流電壓的測(cè)量,交流電壓的表征與測(cè)量方法,低頻電壓的測(cè)量,等內(nèi)容。
2009-07-13 15:53:330 測(cè)量方法:以RPM(每分鐘轉(zhuǎn)數(shù))為單位的轉(zhuǎn)速測(cè)定用下面三種典型的方法之一來(lái)完成。
1.機(jī)械轉(zhuǎn)速測(cè)量
由機(jī)械測(cè)量傳感器進(jìn)行數(shù)據(jù)采集是測(cè)量RPM的傳統(tǒng)方法。傳感器中
2009-09-06 22:49:57119 本文介紹了一種電機(jī)轉(zhuǎn)矩在線測(cè)量系統(tǒng)的結(jié)構(gòu)原理和設(shè)計(jì)要點(diǎn)。該系統(tǒng)采用普通交流電機(jī)作為負(fù)載,對(duì)待測(cè)調(diào)速電機(jī)進(jìn)行轉(zhuǎn)矩測(cè)量。采用單片機(jī)對(duì)負(fù)載電機(jī)電流及待測(cè)電機(jī)轉(zhuǎn)速進(jìn)行
2009-09-14 15:45:3750 高精度測(cè)量。電機(jī)特性常數(shù)測(cè)試系統(tǒng)測(cè)試項(xiàng)目:1、轉(zhuǎn)矩-轉(zhuǎn)速特性及效率:轉(zhuǎn)矩轉(zhuǎn)速曲線 電機(jī)效率;2、關(guān)鍵特性參數(shù)的測(cè)量:持續(xù)轉(zhuǎn)矩
2023-10-28 13:12:56
熱工測(cè)量的概念和測(cè)量方法
本章講述了測(cè)量及測(cè)量誤差的基本概念,測(cè)量的一般方法,
2010-09-14 15:59:2912 頻率測(cè)量方法的改進(jìn)
2010-10-14 16:41:0020 摘 要:本文通過(guò)合理選擇步進(jìn)電機(jī)相繞組細(xì)分電流波形,提出并介紹了基于80C196MC單片機(jī)控制的步進(jìn)電機(jī)恒轉(zhuǎn)矩斬波恒流細(xì)分驅(qū)動(dòng)方案、技術(shù)實(shí)現(xiàn)及其應(yīng)用。引言步進(jìn)電
2006-03-11 13:47:08 628
628 
可控硅的測(cè)量方法
一、概述
2007-12-22 11:33:1146968 
鎖相環(huán)路跟蹤特性的測(cè)量方法:鎖相環(huán)路的跟蹤特性是可以測(cè)量的。以CMOS集成鎖相環(huán)路5G4046構(gòu)成的跟蹤濾波器如圖6-2(a)。在電源電壓為10V,中心頻率fo=1
2008-04-21 11:53:401225 
電力功率測(cè)量方法
從大的方面來(lái)看,很多領(lǐng)域都需要功率測(cè)量,而且不同領(lǐng)域功率測(cè)量的方法是大不相同的。例如
2008-12-04 11:27:412475 
阻抗測(cè)量方法在傳感器技術(shù)中的應(yīng)用
實(shí)際應(yīng)用中的電路元件要比理想電阻復(fù)雜得多,并且呈現(xiàn)出阻性、容性和感性特性,它們共同決定了阻抗特性。
2010-01-13 10:04:59709 步進(jìn)電機(jī)的保持轉(zhuǎn)矩,近似于傳統(tǒng)電機(jī)所稱的“功率”。當(dāng)然,有著本質(zhì)的區(qū)別。步進(jìn)電機(jī)的物理結(jié)構(gòu),完全不同于交流、直流電機(jī),步進(jìn)電機(jī)的輸出功率是可變的。
2010-06-12 08:19:261036 電機(jī)轉(zhuǎn)速 和轉(zhuǎn)子位置的測(cè)量在電機(jī)交直流調(diào)速控制系統(tǒng)中占有重要的位置,為提高測(cè)量的精度和避免噪聲影響,多采用數(shù)字式測(cè)量方法。基于常規(guī)的M/ T 法,提出了電機(jī)轉(zhuǎn)速和轉(zhuǎn)子位置測(cè)量
2011-07-06 17:04:34166 鑫思科技提供發(fā)電機(jī)負(fù)載測(cè)試,發(fā)電機(jī)組絕緣電阻的測(cè)量方法,負(fù)載功率測(cè)試
2011-07-12 15:27:507501 車輛、船和由內(nèi)燃機(jī)驅(qū)動(dòng)的裝置 無(wú)線電騷擾特性 限值和測(cè)量方法,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-26 15:19:3210 在日常工作當(dāng)中,人們對(duì)了解傳感器的測(cè)量方法都不是很全面,那么傳感器的測(cè)量手法有哪些?下面我跟大家講解一下傳感器測(cè)量方法,就是傳感器測(cè)量時(shí)所采取的具體方法。
2017-01-19 15:02:592289 基于油罐液位測(cè)量方法的研究
2017-01-22 13:38:0813 基于表觀BRDF的泡沫金屬輻射特性反演測(cè)量方法_張琳
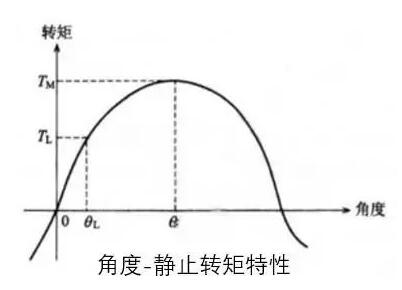
2017-03-19 19:11:450 是指在單脈沖、電流不變的情況下,步進(jìn)電動(dòng)機(jī)的靜轉(zhuǎn)矩T與轉(zhuǎn)子失調(diào)角θ之間的關(guān)系曲線T=f。矩角特性是步進(jìn)電動(dòng)機(jī)的基本特性,正確而方便地測(cè)定這一特性是很重要的,但至今仍感到困難,人們?cè)缇拖胪ㄟ^(guò)旋轉(zhuǎn)感應(yīng)電壓,來(lái)測(cè)出步進(jìn)電動(dòng)機(jī)的矩角特性。
2017-11-21 16:46:0812317 
步進(jìn)拖動(dòng)的特性由驅(qū)動(dòng)線路、機(jī)械結(jié)構(gòu)和步進(jìn)電動(dòng)機(jī)各自的特性所決定。步進(jìn)電機(jī)的工作狀態(tài)可以分為靜態(tài)、穩(wěn)態(tài)和過(guò)渡態(tài)三種。
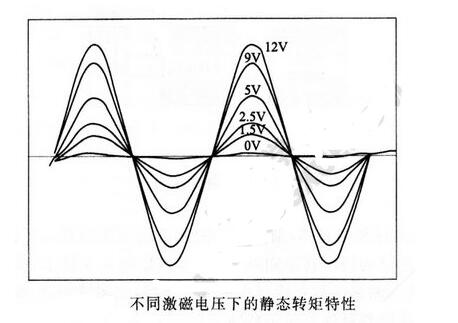
2018-02-07 12:48:0811718 額定電壓(電流)驅(qū)動(dòng):參見(jiàn)前文《步進(jìn)電機(jī)的靜態(tài)轉(zhuǎn)矩特性及測(cè)量方法》一文的下圖,從額定電壓降低電壓來(lái)驅(qū)動(dòng)步進(jìn)電機(jī),發(fā)現(xiàn)位置定位精度變差。
2019-10-07 16:17:002130 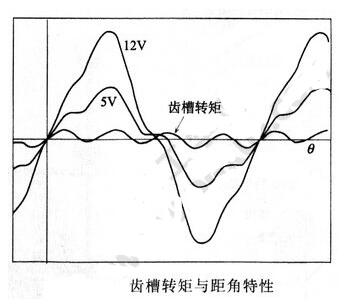
動(dòng)態(tài)轉(zhuǎn)矩特性包括驅(qū)動(dòng)脈沖頻率-轉(zhuǎn)矩特性和驅(qū)動(dòng)脈沖頻率-慣量特性。
2019-10-08 15:55:454105 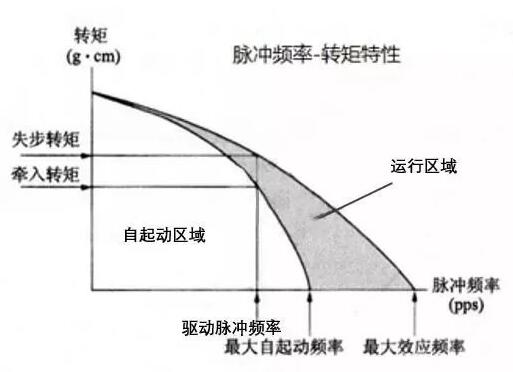
由于步進(jìn)電機(jī)轉(zhuǎn)子慣量作用,即使空載運(yùn)行一步,也會(huì)產(chǎn)生超越角(over-shoot),并在超越角與返回角(under-shoot)之間來(lái)回振蕩,經(jīng)過(guò)哀減后靜止于所定角度,此為步進(jìn)電機(jī)暫態(tài)響應(yīng)特性。
2019-10-08 16:14:271132 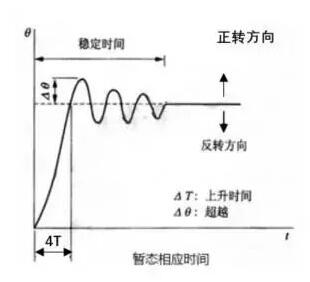
能等因素緊密聯(lián)系,轉(zhuǎn)矩的測(cè)量對(duì)傳動(dòng)軸載荷的確定與控制、傳動(dòng)系統(tǒng)工作零件的強(qiáng)度設(shè)計(jì)以及原動(dòng)機(jī)容量的選擇等都具有重要的意義。
2019-10-08 16:20:407154 根據(jù)轉(zhuǎn)矩的不同情況,可以采取不同的轉(zhuǎn)矩測(cè)量方法。轉(zhuǎn)矩=9550*功率/轉(zhuǎn)速同樣功率=轉(zhuǎn)速*轉(zhuǎn)矩/9550平衡方程式中:功率的單位(kW);轉(zhuǎn)速的單位(r/min);轉(zhuǎn)矩的單位(N.m);9550是計(jì)算系數(shù)。
2019-11-15 09:16:0411125 本文主要闡述了壓限器的測(cè)量方法及壓限器的作用。
2019-11-27 10:00:373099 提高驅(qū)動(dòng)電路的電壓:要維持高速時(shí)的大轉(zhuǎn)矩,就要保持電流不變,使斬波器工作在恒電流狀態(tài)。要使電流恒定,只能提高脈沖頻率。當(dāng)步進(jìn)電機(jī)輸出轉(zhuǎn)速到達(dá)一定高的速度時(shí),由于電壓限制,只能工作在恒電壓狀態(tài),如果提高輸入電壓,則可以使其在高速時(shí)依然能工作在恒電流狀態(tài),從而提高高速時(shí)的轉(zhuǎn)矩。
2019-12-10 09:30:315490 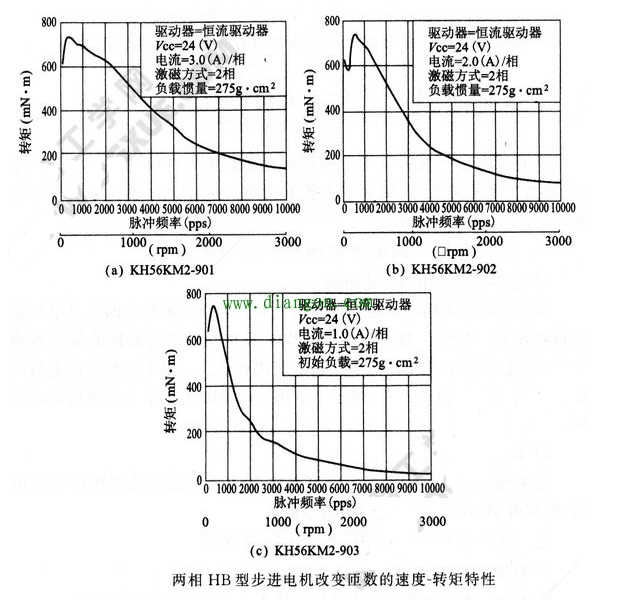
振動(dòng)的測(cè)量不同于噪音測(cè)量所示的規(guī)格,振動(dòng)測(cè)量方法及振動(dòng)計(jì)有很多種。振動(dòng)傳感器包括位移計(jì)、速度針、加速度計(jì)等,其中與速度成比例的電動(dòng)型以及與加速度成比例的壓電型振動(dòng)傳感器較常使用。
2019-12-11 08:50:563742 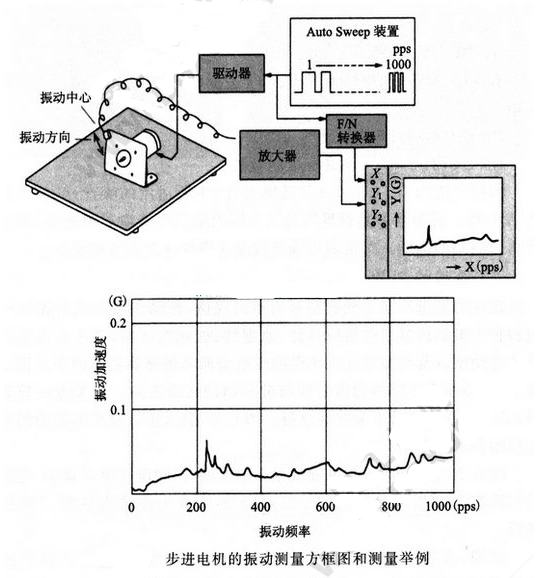
步進(jìn)電機(jī)的線圈通直流電時(shí),帶負(fù)載轉(zhuǎn)子的電磁轉(zhuǎn)矩(與負(fù)載轉(zhuǎn)矩平衡而產(chǎn)生的恢復(fù)電磁轉(zhuǎn)矩稱為靜態(tài)轉(zhuǎn)矩或靜止轉(zhuǎn)矩)與轉(zhuǎn)子功率角的關(guān)系稱為角度-靜止轉(zhuǎn)矩特性,這就是電機(jī)的靜態(tài)特性。
2019-12-11 09:02:0510552 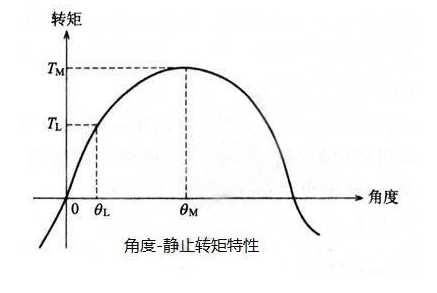
測(cè)量暫態(tài)特性,縱軸的角度精度要更精確的獲取,電位計(jì)用編碼器來(lái)代替,其穩(wěn)定波形可以用打印機(jī)輸出。下圖為此測(cè)量方法的穩(wěn)定波形,有兩次衰減振蕩即到達(dá)停止角度的±5%內(nèi),即到1.8°±5%讀取穩(wěn)定時(shí)間(setting time)。
2019-12-11 09:20:282355 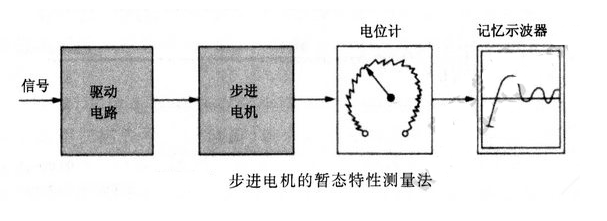
對(duì)于電機(jī)的轉(zhuǎn)速也要特別考慮。因?yàn)椋?b class="flag-6" style="color: red">電機(jī)的輸出轉(zhuǎn)矩,與轉(zhuǎn)速成反比。就是說(shuō),步進(jìn)電機(jī)在低速(每分鐘幾百轉(zhuǎn)或更低轉(zhuǎn)速,其輸出轉(zhuǎn)矩較大),在高速旋轉(zhuǎn)狀態(tài)的轉(zhuǎn)矩(1000轉(zhuǎn)/分--9000轉(zhuǎn))就很小了。
2019-12-11 09:30:0425696 最簡(jiǎn)單的方法是在負(fù)載軸上增加一個(gè)杠桿,用彈簧秤拉動(dòng)杠桿,拉力乘以臂的長(zhǎng)度就是負(fù)載力矩。也可以根據(jù)負(fù)載特性進(jìn)行理論計(jì)算。由于步進(jìn)電機(jī)是控制型電機(jī),目前常用的步進(jìn)電機(jī)最大轉(zhuǎn)矩不超過(guò)45nm。
2020-08-08 09:19:001579 “牽入轉(zhuǎn)矩特性”也稱為“啟動(dòng)轉(zhuǎn)矩特性”,表示可以使停止?fàn)顟B(tài)的步進(jìn)電機(jī)啟動(dòng)的頻率(脈沖頻率)與負(fù)載轉(zhuǎn)矩之間的關(guān)系。牽入轉(zhuǎn)矩曲線內(nèi)的區(qū)域稱為“自啟動(dòng)區(qū)域”,是可以啟動(dòng)、停止和反轉(zhuǎn)的區(qū)域。另外,將負(fù)載轉(zhuǎn)矩為零的頻率=可以啟動(dòng)步進(jìn)電機(jī)的極限頻率稱為“最大自啟動(dòng)頻率”。如圖所示,頻率越高,可啟動(dòng)的負(fù)載轉(zhuǎn)矩越低。
2021-06-12 16:27:005566 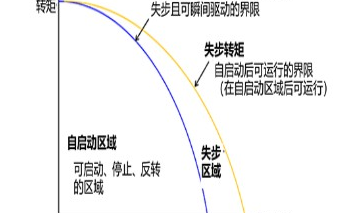
下圖顯示了步進(jìn)電機(jī)的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2021-06-13 17:46:324193 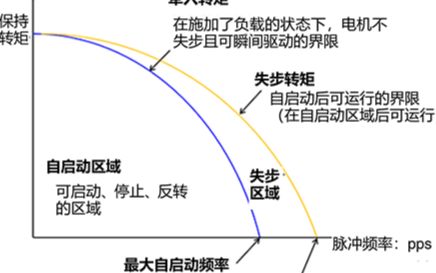
工業(yè)、科學(xué)和醫(yī)療射頻設(shè)備的特性及測(cè)量方法
2021-08-09 09:55:2530 基于聲卡的直流信號(hào)測(cè)量方法分析(通信電源技術(shù)期刊幾類)-該資料為?基于聲卡的直流信號(hào)測(cè)量方法分析
2021-09-28 11:54:3512 ? GIS回路電阻測(cè)量方法根據(jù)測(cè)量的模式不同可以分為傳統(tǒng)GIS回路電阻測(cè)量方法和智能GIS回路電阻測(cè)量方法,接下來(lái)登豐電力帶大家熟悉一下傳統(tǒng)GIS回路電阻測(cè)量方法和智能GIS回路電阻測(cè)量方法。 傳統(tǒng)
2021-11-18 18:01:011666 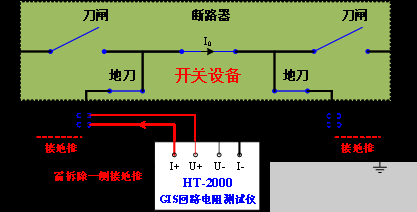
電氣照明和類似設(shè)備的無(wú)線電干擾特性的限值和測(cè)量方法
2021-12-20 16:00:072 本文將介紹步進(jìn)電機(jī)的基本特性。步進(jìn)電機(jī)的基本特性:下圖顯示了步進(jìn)電機(jī)的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2023-02-24 09:51:101168 
測(cè)量伺服電機(jī)好壞的方法主要有以下幾種:
靜態(tài)測(cè)試:靜態(tài)測(cè)試通常使用負(fù)載測(cè)量儀或者力矩傳感器,測(cè)量電機(jī)輸出的轉(zhuǎn)矩和電流,以判斷電機(jī)是否符合規(guī)格參數(shù)要求。
2023-03-07 14:49:146127 
步進(jìn)電機(jī)的頻率特性主要指其轉(zhuǎn)速與輸入脈沖信號(hào)頻率之間的關(guān)系。由于步進(jìn)電機(jī)的運(yùn)動(dòng)是由輸入脈沖信號(hào)控制的,因此輸入脈沖信號(hào)的頻率會(huì)直接影響步進(jìn)電機(jī)的轉(zhuǎn)速和運(yùn)動(dòng)精度。
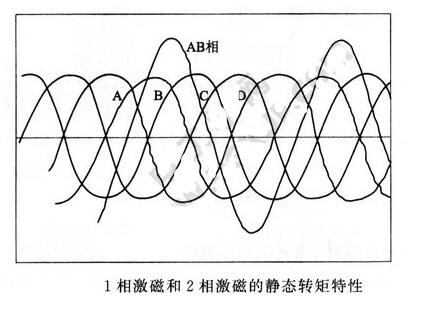
2023-03-08 14:24:331240 另外,步進(jìn)電機(jī)的牽入轉(zhuǎn)矩特性和失步轉(zhuǎn)矩特性會(huì)因勵(lì)磁方法和驅(qū)動(dòng)電路而異。因此,對(duì)步進(jìn)電機(jī)的特性研究中,需要進(jìn)行包括驅(qū)動(dòng)方法和電路在內(nèi)的整體評(píng)估。
2023-03-09 11:52:28454 
應(yīng)用的電感測(cè)量方法原理、
步驟及優(yōu)缺點(diǎn)。直流暫態(tài)法原理簡(jiǎn)單,操作容易,但必須知道準(zhǔn)確的電機(jī)相對(duì)零位,并用外部夾具將電機(jī)轉(zhuǎn)子固定在相對(duì)零
位,所以相對(duì)零位的精確度會(huì)直接影響該方法的準(zhǔn)確性。交流穩(wěn)態(tài)法的測(cè)量步驟相對(duì)繁瑣
2023-03-13 10:48:462 基礎(chǔ)參數(shù)介紹 轉(zhuǎn)矩 相、極 步距角、極性 步進(jìn)方式 四、步進(jìn)電機(jī)特性 矩角特性 靜態(tài)特性 靜態(tài)穩(wěn)定區(qū) 多拍的矩角特性族動(dòng)態(tài)特性 轉(zhuǎn)子的震蕩過(guò)程 共振現(xiàn)象 共振的解決方案矩頻特性與起動(dòng)慣頻特性 該文章主要介
2023-03-21 14:32:299 下面從速度-轉(zhuǎn)矩特性考慮要增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法。增加轉(zhuǎn)矩時(shí),根據(jù)速度的高低,其解決方法各不相同。而解決方法既有電機(jī)方面的,又有驅(qū)動(dòng)電路方面的。
在低速時(shí)轉(zhuǎn)矩隨轉(zhuǎn)子齒數(shù)增加而變大。選擇
2023-03-21 15:03:520 依據(jù)電機(jī)在一定驅(qū)動(dòng)速度的條件下,其所帶的負(fù)載轉(zhuǎn)矩、負(fù)載慣量(轉(zhuǎn)動(dòng)慣M)和必需的加速轉(zhuǎn)矩,來(lái)計(jì)算所選擇步進(jìn)電機(jī)的輸出轉(zhuǎn)矩。
負(fù)載轉(zhuǎn)矩 T L T_L TL時(shí),欲驅(qū)動(dòng)其到 f 2 f_2 f2
2023-03-21 10:53:210 步進(jìn)電機(jī)基礎(chǔ)(3.2)-步進(jìn)電機(jī)的原理與特性之基本特性 前言 基本信息 公式 前言說(shuō)明 基本特性 1. 靜態(tài)轉(zhuǎn)矩特性 2. 動(dòng)態(tài)轉(zhuǎn)矩特性 1) 脈沖頻率-轉(zhuǎn)矩特性 2) 脈沖頻率-慣量特性3. 暫態(tài)
2023-03-23 13:51:012 本章為步進(jìn)電機(jī)的基礎(chǔ)理論,主要講解轉(zhuǎn)矩是如何產(chǎn)生的?如何用數(shù)學(xué)公式表示。并且對(duì)步進(jìn)電機(jī)的基本特性:靜態(tài)特性、動(dòng)態(tài)特性、暫態(tài)特性加以說(shuō)明,以便讀者更好地理解并掌握此三種基 本特性。
步進(jìn)電機(jī)可視
2023-03-23 10:54:3769 為了評(píng)估步進(jìn)電機(jī)的特性必須要有必要的測(cè)量方法。本章針對(duì)步進(jìn)電機(jī)的基本特性①靜態(tài)特性:靜態(tài)轉(zhuǎn)矩特性,步進(jìn)角度精度;②動(dòng)態(tài)特性:速度-轉(zhuǎn)矩特性;③暫態(tài)特件;介紹各種測(cè)量方法。并且進(jìn)一步
說(shuō)明引起步進(jìn)電機(jī)產(chǎn)生振動(dòng)和噪音的原因,以及振動(dòng)和噪音的測(cè)量方法。
2023-03-23 10:00:441 步進(jìn)電機(jī)基礎(chǔ)(8.3)-步進(jìn)電機(jī)的問(wèn)題解決方案-改善暫態(tài)特性的解決方法 前言 基本信息 前言說(shuō)明 8.3 改善暫態(tài)特性的解決方法 1. 利用阻尼器的改善 2 . 利用驅(qū)動(dòng)電路的改善 (1) 半步進(jìn)
2023-03-24 11:05:350 電阻是電路中常見(jiàn)的基本元件,其測(cè)量方法主要有以下幾種:直流電橋法、直流電壓比較法、萬(wàn)用表測(cè)量法、數(shù)字多用表測(cè)量法、數(shù)字電橋法、示波器法、恢復(fù)法等。下面將詳細(xì)介紹這些測(cè)量方法。 直流電橋法是一種經(jīng)典
2024-01-14 14:52:02683 等,因此在各種自動(dòng)化設(shè)備和精密儀器中得到廣泛應(yīng)用。 步進(jìn)電機(jī)的特性曲線圖揭示了其轉(zhuǎn)矩與脈沖頻率(或稱為驅(qū)動(dòng)頻率)之間的關(guān)系。在這張圖中,垂直軸代表轉(zhuǎn)矩,而水平軸代表脈沖頻率,用每秒脈沖數(shù)(pps)來(lái)度量。圖表中的藍(lán)
2024-02-06 09:33:21228 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論