數(shù)控機(jī)床伺服系統(tǒng)的作用在于接受來自數(shù)控裝置的指令信號,驅(qū)動機(jī)床移動部件跟隨指令脈沖運動,并保證動作的快速和準(zhǔn)確,這就要求高質(zhì)量的速度和位置伺服。本文主要簡析伺服系統(tǒng)的基本要求、特點、分類及發(fā)展方向...
2013-04-09 11:47:12 5312
5312 交流伺服系統(tǒng)包含交流伺服驅(qū)動器和伺服電機(jī)。選用伺服系統(tǒng),主要為了進(jìn)行精密的定位控制,伺服驅(qū)動器在位置控制模式下運行,控制框圖如圖一所示。
2022-12-05 10:03:411734 和單步點動,要求進(jìn)給驅(qū)動具有足夠?qū)挼恼{(diào)速范圍。單步點動作為一種輔助工作方式常常在工作臺的調(diào)整中使用。伺服系統(tǒng)在低速情況下實現(xiàn)平穩(wěn)進(jìn)給,則要求速度必須大于“死區(qū)”范圍。所謂“死區(qū)”指的是由于靜摩擦力
2018-10-19 10:32:00
什么是伺服系統(tǒng)?伺服系統(tǒng)是由哪些部分組成的?伺服驅(qū)動器的原理是什么?伺服控制系統(tǒng)有哪幾種控制方式?
2021-10-11 08:03:33
中,常會碰到慣量問題!具體表現(xiàn)為:1、在伺服系統(tǒng)選型時,除考慮電機(jī)的扭矩和額定速度等等因素外,我們還需要先計算得知機(jī)械系統(tǒng)換算到電機(jī)軸的慣量,再根據(jù)機(jī)械的實際動作要求及加工件質(zhì)量要求來具體選擇具有合適
2018-10-15 10:48:31
高質(zhì)量的速度和位置伺服。以上指的主要是進(jìn)給伺服控制,另外還有對主運動的伺服控制,不過控制要求不如前者高。數(shù)控機(jī)床的精度和速度等技術(shù)指標(biāo)往往主要取決于伺服系統(tǒng)。??一、伺服系統(tǒng)的基本要求和特點??1.
2021-01-05 10:13:47
伺服電機(jī)驅(qū)動器的工作原理?基本要求有哪些?
2021-09-28 08:20:29
伺服系統(tǒng)的定義伺服系統(tǒng)是用來精確地跟隨或復(fù)現(xiàn)某個過程的反饋控制系統(tǒng)。它的主要任務(wù)是按控制命令的要求、對功率進(jìn)行放大、變換與調(diào)控等處理,使驅(qū)動裝置輸出的力矩、速度和位置控制非常靈活方便。伺服系統(tǒng)定位
2023-03-08 09:37:19
伺服系統(tǒng)控制框架是由哪些部分組成的?伺服系統(tǒng)控制包括哪些參數(shù)?
2021-10-11 09:05:11
伺服系統(tǒng)有哪幾種控制方式?伺服系統(tǒng)的工作原理是什么?有哪些性能?
2021-09-23 08:39:15
伺服系統(tǒng)由哪幾部分組成?伺服系統(tǒng)常用的參數(shù)有哪些?如何選擇伺服電機(jī)?伺服驅(qū)動器控制原理是什么?
2021-09-26 08:26:53
伺服系統(tǒng)國內(nèi)外研究現(xiàn)狀如何?伺服系統(tǒng)的發(fā)展趨勢是怎樣的?伺服系統(tǒng)相關(guān)技術(shù)是什么?
2021-09-30 07:29:16
伺服系統(tǒng)的機(jī)械時間常數(shù)是什么?伺服系統(tǒng)的電氣時間常數(shù)是什么?求大神解答
2021-09-30 08:16:25
交流伺服電機(jī)的工作原理伺服系統(tǒng)的組成及分類伺服馬達(dá)(交流)的特點伺服控制的選型步驟
2021-02-22 07:55:20
伺服系統(tǒng)配件有哪些?如何去安裝伺服系統(tǒng)?伺服驅(qū)動器與伺服電機(jī)是如何進(jìn)行連接的?漏電開關(guān)有接地和沒接地的區(qū)別在哪?
2021-06-28 07:05:32
進(jìn)給驅(qū)動伺服電機(jī)怎么選?伺服電機(jī)慣量Jm和負(fù)載慣量Jl之間的有什么關(guān)系?
2021-09-24 08:36:29
、技術(shù)支持與服務(wù)。此外還可為有需求的長三角及周邊客戶提供短時間內(nèi)到達(dá)現(xiàn)場維修技術(shù)服務(wù)。 UEC 111海德漢伺服驅(qū)動器基本請求: 伺服進(jìn)給系統(tǒng)的請求 1、調(diào)速范圍寬 2、定位精度高 3、有
2020-03-13 16:54:33
)的輸出波形是否正常來判斷編碼器的好壞(應(yīng)注意在設(shè)備正常時測錄編碼器的正常輸出波形,以便故障時查對)。 第四.坐標(biāo)軸進(jìn)給時振動應(yīng)檢查電機(jī)線圈、機(jī)械進(jìn)給絲杠同電機(jī)的連接、伺服系統(tǒng)、脈沖編碼器、聯(lián)軸節(jié)
2018-03-20 21:49:42
1.開環(huán)進(jìn)給伺服系統(tǒng) 開環(huán)進(jìn)給伺服系統(tǒng)是數(shù)控機(jī)床中最簡單的伺服系統(tǒng),執(zhí)行元件一般為步進(jìn)電機(jī),其控制原理 開環(huán)進(jìn)給伺服系統(tǒng)的精度較低,速度也受到步進(jìn)電動機(jī)性能的限制。但由于其結(jié)構(gòu)簡單,易于調(diào)整
2023-03-21 17:53:51
和連接等操作。而如果使用基于數(shù)字式反饋技術(shù)的單電纜伺服電機(jī),伺服反饋和動力電源(含抱閘控制)將集成在一根線纜中。那么,在這種情況下,設(shè)備系統(tǒng)對于驅(qū)動器和電機(jī)之間的線路連接又有著怎樣的要求呢?在伺服反饋
2018-10-17 10:32:46
基于Labview的氣動伺服系統(tǒng)辨識程序,哪位朋友做過的幫幫忙,搭建的系統(tǒng)跟論文《基于 LabVIEW 的氣動比例伺服系統(tǒng)模型辨識研究》中的模型一樣。
2016-04-19 15:56:52
對于精度要求較高的電機(jī)伺服控制系統(tǒng),現(xiàn)在一般都以什么為核心芯片搭建系統(tǒng)。備選的有stm32f4系列和DSP,但是不知道這兩種有芯片各都有什么優(yōu)點和缺點,還有就是具體的型號的特性,大神給介紹一下吧
2016-05-07 16:42:39
。所以研制適合不同材料加工要求的壓力機(jī)數(shù)字控制系統(tǒng), 對提高材料加工技術(shù)的水平和加工裝備的數(shù)字化能力具有十分重要的現(xiàn)實意義[1]。伺服壓力機(jī)的基本結(jié)構(gòu)及對控制系統(tǒng)的要求與傳統(tǒng)壓力機(jī)比較,伺服壓力機(jī)取消
2019-07-29 08:31:42
了更高的要求。因此研究、制造高性能、高可靠性的伺服驅(qū)動系統(tǒng)是工業(yè)先進(jìn)國家競相努力的目標(biāo),有著十分重要的現(xiàn)實意義。
2019-09-03 07:06:57
數(shù)控轉(zhuǎn)臺回轉(zhuǎn)進(jìn)給系統(tǒng)廣泛應(yīng)用于數(shù)控轉(zhuǎn)臺加工、制造和測量等領(lǐng)域。其性能指標(biāo)將直接影響到生產(chǎn)、加工和計量的質(zhì)量。數(shù)控轉(zhuǎn)臺的傳統(tǒng)驅(qū)動方式一般是旋轉(zhuǎn)伺服電機(jī)加蝸輪、蝸桿副和傳動齒輪副。由于是齒輪傳動階段
2021-09-01 06:05:14
的要求,將輸入的各種形式的能量轉(zhuǎn)化成機(jī)械能,驅(qū)動被控對象工作。機(jī)電一體化系統(tǒng)中的執(zhí)行元件一般指各種電機(jī)或液壓、氣動伺服機(jī)構(gòu)等。4、被控對象 被控對象指被控制的物件,例如一個機(jī)械手 臂,或是一個機(jī)械工作
2018-10-12 11:01:08
進(jìn)給傳動鏈的反向問隙或伺服驅(qū)動增益過大所致。 2、爬行現(xiàn)象大多發(fā)生在起動加速段或低速進(jìn)給時,一般是由于進(jìn)給傳動鏈的潤滑狀態(tài)不良, 伺服系統(tǒng)增益低及外加負(fù)載過大等因素所致。 尤其要注意的是,伺服電動機(jī)
2020-07-04 16:08:37
伺服系統(tǒng)是什么?伺服系統(tǒng)的主要作用有哪些?伺服系統(tǒng)主要分為哪幾類?對伺服系統(tǒng)的基本要求有哪些? 交流伺服電機(jī)和無刷直流伺服電機(jī)在功能上有什么區(qū)別?
2021-07-13 08:15:33
請問如何才能選出符合要求的伺服電機(jī)?
2021-09-26 08:17:33
步進(jìn)電動機(jī)的主要特點:� � 1)步進(jìn)電動機(jī)的輸出轉(zhuǎn)角與輸入的脈沖個數(shù)嚴(yán)格成正比,故控制輸入步進(jìn)電動機(jī)的脈沖個數(shù)就能控制位移量;�
2008-11-20 01:07:50 0
0 數(shù)控機(jī)床的伺服系統(tǒng)一、 伺服系統(tǒng)的組成 數(shù)控機(jī)床的伺服系統(tǒng)按其功能可分為:進(jìn)給伺服系統(tǒng)和主軸伺服系統(tǒng)。 主軸伺服系統(tǒng)用于
2008-12-30 16:12:5260 本章將詳細(xì)討論進(jìn)給伺服系統(tǒng)的軟件硬件結(jié)構(gòu);進(jìn)給伺服系統(tǒng)基本功能的原理及實現(xiàn)方法。進(jìn)給伺服系統(tǒng)是數(shù)控系統(tǒng)主要的子系統(tǒng)。如果說CNC裝置是數(shù)控系統(tǒng)的“大腦”,是發(fā)布
2009-02-16 00:21:310 本文主要講述XA6140銑床進(jìn)給裝置的改造,并且闡述 -1PG的基本原理和安川伺服在改造中的具體應(yīng)用。[關(guān)鍵詞] PLC 位控模塊 速度控制 位置控制&n
2009-04-12 00:46:0120 數(shù)控機(jī)床的伺服驅(qū)動系統(tǒng):
開環(huán)步進(jìn)式伺服驅(qū)動系統(tǒng) 開環(huán)步進(jìn)式伺服驅(qū)動系統(tǒng)閉環(huán)伺服控制原理與系統(tǒng) 閉環(huán)伺服控制原理與系統(tǒng)CNC CNC伺服系統(tǒng) 伺服系統(tǒng)
2009-04-30 09:30:4645 本文介紹了利用可編程序控制器中的計數(shù)裝置,對細(xì)長孔加工的控制過程。關(guān)鍵詞: PLC 可編程序控制器; 分級進(jìn)給法; 分級進(jìn)給機(jī)構(gòu);計數(shù)器
2009-05-30 08:34:2111 本文在介紹車載DVD 伺服控制系統(tǒng)的構(gòu)成和設(shè)計原理的基礎(chǔ)上,針對車載DVD伺服系統(tǒng)要求高精度、抗震動、快速響應(yīng)的特點,采用了臺灣ALI 公司生產(chǎn)的高度集成的DVD 驅(qū)動器專用伺服
2009-05-30 13:22:35115 將PLC 級式編程技術(shù)運用于液壓縱橫油缸進(jìn)給加工系統(tǒng),使控制軟件與工序動作有較好的對應(yīng)關(guān)系,編程和調(diào)試效率高。與梯形圖相比,軟件語句少,掃描時間短,實時性較強(qiáng)。關(guān)
2009-06-18 09:15:0617 轉(zhuǎn)角-線位移式全閉環(huán)位置伺服系統(tǒng)及誤差分析::在一些精度要求比較高的應(yīng)用場合,半閉環(huán)的位置伺服系統(tǒng)不能滿足要求。文中提出采用轉(zhuǎn)角-線位移式全閉環(huán)位置控制方法,光柵
2009-07-05 21:34:2121 多通道電液伺服加載系統(tǒng)是用于大型構(gòu)件的各種工程試驗的高技術(shù)成套設(shè)備。本文針對多通道電液伺服加載系統(tǒng)的功能要求,提出了系統(tǒng)結(jié)構(gòu),完成了控制系統(tǒng)的硬件和軟件設(shè)計。
2009-08-26 10:41:2318 機(jī)床進(jìn)給傳動系統(tǒng)設(shè)計是機(jī)床設(shè)計中的重要環(huán)節(jié),系統(tǒng)中的不確定因素導(dǎo)致被控對象參數(shù)不確定,對控制器提出很高的要求。文章使用定量反饋理論這種魯棒控制設(shè)計方法設(shè)計控
2009-12-19 14:33:0610 泰科伺服生產(chǎn)的MT無刷伺服系統(tǒng)主要由IDM系列伺服驅(qū)動器與兼容NEMA法蘭尺寸的直流無刷伺服電機(jī)組合而成。采用直流供電,最大功率可達(dá)600W,主要應(yīng)用于小型移動機(jī)器人、自動化檢測組裝、醫(yī)療設(shè)備等行業(yè)
2023-04-20 10:45:52
Z406 數(shù)控坐標(biāo)臺式鉆床主軸自動進(jìn)給步進(jìn)電機(jī)扭矩的設(shè)計計算:設(shè)計Z406 數(shù)控坐標(biāo)臺式鉆床時,對主軸自動進(jìn)給步進(jìn)電機(jī)扭力矩的設(shè)計計算介紹如下:該數(shù)控坐標(biāo)臺式鉆床設(shè)計要求:1) 最大
2010-01-10 22:24:5143 本文在介紹車載DVD伺服控制系統(tǒng)的構(gòu)成和設(shè)計原理的基礎(chǔ)上,針對車載DVD伺服系統(tǒng)要求高精度、抗震動、快速響應(yīng)的特點,采用了臺灣ALI公司生產(chǎn)的高度集成的DVD驅(qū)動器專用伺服控
2010-07-13 17:58:4857 ESTUN伺服泵系統(tǒng)按照注塑機(jī)執(zhí)行機(jī)構(gòu)所需的壓力和流量計算控制伺服電機(jī)及泵的轉(zhuǎn)速,消除無功能耗ESTUN伺服泵系統(tǒng)采用交流伺服驅(qū)動器和永磁同步伺服電機(jī)驅(qū)動內(nèi)嚙合齒
2010-08-27 21:03:2476 數(shù)控機(jī)床伺服驅(qū)動系統(tǒng)的分類
數(shù)控機(jī)床的伺服驅(qū)動系統(tǒng)按其用途和功能分為進(jìn)給驅(qū)動系統(tǒng)和主軸驅(qū)動系統(tǒng);按其控制原理和有無位置
2009-05-06 23:32:443666 
交流伺服電機(jī)的工作原理
交流伺服電機(jī)驅(qū)動是最新發(fā)展起來的新型伺服系統(tǒng),也是當(dāng)前機(jī)床進(jìn)給驅(qū)動系統(tǒng)方面的一個新動向。該系統(tǒng)
2009-05-06 23:50:1040286 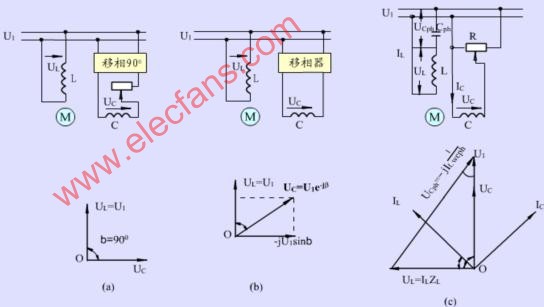
【摘 要】 介紹了應(yīng)用Lattice公司的在系統(tǒng)可編程器件(ISP)來實現(xiàn)一種新型機(jī)床自動數(shù)控裝置的方法。 關(guān)鍵詞:自動進(jìn)給
2009-05-15 22:20:18694 
伺服系統(tǒng)按其驅(qū)動元件劃分,有步進(jìn)式伺服系統(tǒng)、直流電動機(jī)伺服系統(tǒng)、交流電動機(jī)伺服系統(tǒng)。按控制方式劃分,有開環(huán)伺服系統(tǒng)、閉環(huán)伺服系統(tǒng)和半閉環(huán)伺服系統(tǒng)等。
2011-07-10 17:15:042298 
本文以實驗室的電液位置 伺服系統(tǒng) 為研究對象,按照系統(tǒng)的控制要求,提出以ARM9(S3C2410)微處理器為核心的控制器對電液位置伺服系統(tǒng)進(jìn)行控制的一種方案,設(shè)計了一種新型的基于ARM
2011-08-19 11:23:0851 交流永磁伺服系統(tǒng)技術(shù)講座第四講_伺服系統(tǒng)的組成_三_
2016-04-26 10:47:0818 數(shù)控進(jìn)給系統(tǒng)加減速控制研究,有需要的下來看看。
2016-05-03 09:38:5410 數(shù)控加工中線性進(jìn)給率控制研究,有需要的下來看看
2016-05-03 09:38:544 加減速曲線對伺服進(jìn)給系統(tǒng)定位精度影響的試驗研究
2016-05-03 10:10:5612 雙電機(jī)驅(qū)動機(jī)床進(jìn)給系統(tǒng)消隙控制_任海鵬
2017-01-07 18:12:511 伺服驅(qū)動系統(tǒng)是一種以機(jī)械位置或角度作為控制對象的自動控制系統(tǒng),例如數(shù)控機(jī)床等。伺服系統(tǒng)中的驅(qū)動電機(jī)要求具有響應(yīng)速度快、定位準(zhǔn)確、轉(zhuǎn)動慣量( 機(jī)電系統(tǒng)中的伺服電機(jī)的轉(zhuǎn)動慣量較大,為了能夠和絲杠等機(jī)械部件直接相連,也為了得到極高的響應(yīng)速度,伺服電機(jī)有一種專門的小慣量電機(jī)。
2017-06-08 10:13:2016740 伺服系統(tǒng),亦稱隨動系統(tǒng),是一種能夠跟蹤輸入的指令信號進(jìn)行動作,從而獲得精確的位置、速度或力輸出的自動控制系統(tǒng)。大多數(shù)伺服系統(tǒng)具有檢測反饋回路,因而伺服系統(tǒng)是一種反饋控制系統(tǒng)。
2017-06-12 16:01:227159 數(shù)控機(jī)床是具有兩軸聯(lián)動、半閉環(huán)控制的數(shù)控機(jī)床。機(jī)床具有高剛性的結(jié)構(gòu)設(shè)計和吸震性,以保證高精度的切削加工。對控制進(jìn)給軸X、Z軸的伺服驅(qū)動器及電機(jī)要求有高的動態(tài)響應(yīng)特性及精確的定位精度,使機(jī)床的刀架移動快速、穩(wěn)定且定位精度高。
2017-10-09 15:10:1512 現(xiàn)代機(jī)電行業(yè)中經(jīng)常會碰到一些復(fù)雜的運動,這對電機(jī)的動力荷載有很大影響。伺服驅(qū)動裝置是許多機(jī)電系統(tǒng)的核心,因此,伺服電機(jī)的選擇就變得尤為重要。首先要選出滿足給定負(fù)載要求的電動機(jī),然后再從中按價格、重量
2017-10-16 11:10:3523 伺服驅(qū)動系統(tǒng)(Servo System)簡稱伺服系統(tǒng),是一種以機(jī)械位置或角度作為控制對象的自動控制系統(tǒng),例如數(shù)控機(jī)床等。使用在伺服系統(tǒng)中的驅(qū)動電機(jī)要求具有響應(yīng)速度快、定位準(zhǔn)確、轉(zhuǎn)動慣量( 使用在機(jī)電
2017-11-10 16:05:0111712 本文開始介紹了伺服系統(tǒng)的概念和伺服系統(tǒng)主要作用,其次闡述了伺服系統(tǒng)的分類與基本要求,最后闡述了伺服系統(tǒng)主要特點和基本組成結(jié)構(gòu)。
2018-03-27 08:43:2418096 1.什么是伺服?為什么要用伺服?
伺服系統(tǒng)定義:實現(xiàn)輸出變量精確地跟隨或復(fù)現(xiàn)輸入變量的控制系統(tǒng)。對運動控制的要求越來越高,伺服控制應(yīng)運而生。
2018-04-14 10:36:5712094 本文主要介紹什么是伺服系統(tǒng),首先介紹了伺服系統(tǒng)的結(jié)構(gòu)及特點,其次介紹了伺服系統(tǒng)作用、分類及性能要求和參數(shù),最后闡述了伺服系統(tǒng)的發(fā)展趨勢。
2018-04-28 17:08:5632921 本文首先介紹了伺服系統(tǒng)的組成,其次介紹了伺服系統(tǒng)的特點、作用及分類,最后闡述了伺服系統(tǒng)應(yīng)用領(lǐng)域、應(yīng)用趨勢及實例,具體的跟隨小編一起來了解一下。
2018-05-31 10:35:0315589 
本文首先介紹了伺服系統(tǒng)的結(jié)構(gòu)組成,其次介紹了伺服系統(tǒng)設(shè)計要求,最后介紹了伺服系統(tǒng)設(shè)計步驟及方法,具體的跟隨小編一起來了解一下。
2018-05-31 11:05:516102 
本文首先介紹了伺服系統(tǒng)技術(shù)的要求,其次闡述了伺服系統(tǒng)復(fù)合控制技術(shù)和非線性補(bǔ)償技術(shù),最后介紹了伺服系統(tǒng)常用的線性補(bǔ)償,具體的跟隨小編一起來了解一下。
2018-06-01 12:59:563974 本文首先介紹看伺服系統(tǒng)的結(jié)構(gòu)組成與工作原理,其次介紹了伺服系統(tǒng)分類及基本要求與特點,最后介紹了伺服系統(tǒng)在自動化生產(chǎn)中的應(yīng)用。
2018-06-01 17:06:0933197 
高性能的伺服電動機(jī)(簡稱伺服電機(jī)):用于高效和復(fù)雜型面加工的數(shù)控機(jī)床,伺服系統(tǒng)將經(jīng)常處于頻繁的啟動和制動過程中。要求電機(jī)的輸出力矩與轉(zhuǎn)動慣量的比值大,以產(chǎn)生足夠大的加速或制動力矩。要求伺服電機(jī)在低速時有足夠大的輸出力矩且運轉(zhuǎn)平穩(wěn),以便在與機(jī)械運動部分連接中盡量減少中間環(huán)節(jié)。
2018-10-08 17:03:003267 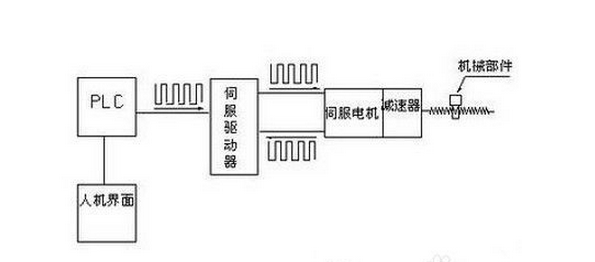
自動進(jìn)給控制系統(tǒng)是數(shù)控機(jī)床等現(xiàn)代加工設(shè)備的重要組成部分。要求以IC74191中規(guī)模數(shù)字集成計數(shù)器為核心,以步進(jìn)電動機(jī)為執(zhí)行元件,設(shè)計一個數(shù)字化自動進(jìn)給控制系統(tǒng)。用EDA軟件進(jìn)行自動進(jìn)給控制系統(tǒng)的研究
2019-10-31 07:47:002487 
也逐漸的發(fā)展起來。不同機(jī)器人對于零件的要求是不同的,而交流伺服電機(jī)驅(qū)動器就是里面很重要的一個部分。今天我們就拿工業(yè)機(jī)器人來特別的講一下。作為工業(yè)機(jī)器人必不可少的關(guān)鍵零部件——伺服系統(tǒng)是以變頻技術(shù)
2018-09-28 15:20:05519 富士交流伺服系統(tǒng)在數(shù)控車床上的解決方案 數(shù)控機(jī)床是具有兩軸聯(lián)動、半閉環(huán)控制的數(shù)控機(jī)床。機(jī)床具有高剛性的結(jié)構(gòu)設(shè)計和吸震性,以保證高精度的切削加工。對控制進(jìn)給軸X、Z軸的伺服驅(qū)動器及電機(jī)要求有高的動態(tài)
2020-06-28 17:22:48817 伺服驅(qū)動系統(tǒng)按其用途和功能分為進(jìn)給驅(qū)動系統(tǒng)和主軸驅(qū)動系統(tǒng);按其控制原理和有無位置檢測反饋環(huán)節(jié)分為開環(huán)系統(tǒng)和閉環(huán)系統(tǒng);按驅(qū)動執(zhí)行元件的動作原理分為電液伺服驅(qū)動系統(tǒng)和伺服驅(qū)動系統(tǒng)。
2019-10-30 09:20:499164 位置伺服系統(tǒng)的主要控制目標(biāo)是輸出值迅速跟蹤指令值的變化。應(yīng)用場合不同,對伺服系統(tǒng)的具體要求也會有所差異,但是大體要求是基本一致的,具體來說,在機(jī)電一體化產(chǎn)品中,對伺服系統(tǒng)的性能指標(biāo)要求主要包括
2019-10-30 09:28:017531 
隨著智能化的發(fā)展要求,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演著重要角色,可以說機(jī)器人所需要的力、力矩等都有伺服電機(jī)提供,以保證其準(zhǔn)確、快速的完成動作。
2020-11-18 17:30:2416300 車床系統(tǒng)中,主軸的回轉(zhuǎn)位置(轉(zhuǎn)角)控制不是用進(jìn)給伺服電動機(jī)而由FANUC主軸電動機(jī)實現(xiàn)。主軸的位置(角度)由裝于主軸(不是主軸電動機(jī))上的高分辨率編碼器檢測,此時主軸是作為進(jìn)給伺服軸工作,運動速度為:度/分,并可與其它進(jìn)給軸一起插補(bǔ),加工出輪廓曲線。
2021-02-24 08:00:0020 伺服控制系統(tǒng)是一種能對試驗裝置的機(jī)械運動按預(yù)定要求進(jìn)行自動控制的操作系統(tǒng)。 在很多情況下,伺服系統(tǒng)專指被控制量(系統(tǒng)的輸出量)是機(jī)械位移或位移速度、加速度的反饋控制系統(tǒng),其作用是使輸出的機(jī)械位移(或轉(zhuǎn)角)準(zhǔn)確地跟蹤輸入的位移(或轉(zhuǎn)角)。伺服系統(tǒng)的結(jié)構(gòu)組成和其他形式的反饋控制系統(tǒng)沒有原則上的區(qū)別。
2021-02-20 15:31:315826 伺服驅(qū)動器也叫伺服控制器或者是伺服放大器,它是一種專用于伺服電機(jī)控制的裝置,其地位類似于變頻控制器之于普通電機(jī)。只有通過伺服驅(qū)動器,我們才能夠讓伺服運動電機(jī)實現(xiàn)速度、位置、力矩的變化,從而實現(xiàn)精準(zhǔn)的控制目的。
2022-09-09 14:11:171225 PWM調(diào)速是利用脈寬調(diào)制器對大功率晶體管的開關(guān)時間進(jìn)行控制。將速度控制信號轉(zhuǎn)換成—定頻率的方波電壓,加到直流伺服電動機(jī)電樞的兩端,通過對方波寬度的控制,改變電樞兩端的平均電壓,從而達(dá)到控制電樞
2022-11-09 17:03:041010 要實現(xiàn)數(shù)控設(shè)備高速化,首先要求數(shù)控系統(tǒng)能對由微小程序段構(gòu)成的加工程序進(jìn)行高速處理,以計算出伺服電機(jī)的移動量。同時要求伺服電機(jī)能高速度地做出反應(yīng),采用32位及64位微處理器,是提高數(shù)控系統(tǒng)高速處理能力的有效手段。實現(xiàn)數(shù)控設(shè)備高速化的關(guān)鍵是提高切削速度、進(jìn)給速度和減少輔助時間。
2022-11-10 14:29:02606 當(dāng)進(jìn)給運動的負(fù)載過大,頻繁正反向運動以及傳動鏈潤滑狀態(tài)不良時,均會引起過載報警。一般會在CRT上顯示伺服電機(jī)過載、過熱或過流等報警信息。同時,在強(qiáng)電柜中的進(jìn)給驅(qū)動單元上,指示燈或數(shù)碼管會提示驅(qū)動單元過載、過電流等信息。
2022-11-29 11:05:021628 接受數(shù)控系統(tǒng)發(fā)出的進(jìn)給速度和位移指令信號,由伺服驅(qū)動電路作一定的轉(zhuǎn)換和功率放大,經(jīng)伺服驅(qū)動裝置和機(jī)械傳動機(jī)構(gòu),驅(qū)動工作臺、主軸頭架等執(zhí)行部件,實現(xiàn)工作進(jìn)給和快速運動。.
2022-12-05 10:42:50456 伺服油泵液壓系統(tǒng)現(xiàn)用的開環(huán)變量泵系統(tǒng)的主要區(qū)別是:動力源不同。開環(huán)變量泵液壓系統(tǒng)的動力源是三相電動機(jī)驅(qū)動開環(huán)變量泵,而伺服油泵液壓系統(tǒng)的動力源則是用伺服電機(jī)驅(qū)動油泵(齒輪泵或柱塞泵)
2023-01-30 14:15:451345 如何設(shè)計一個伺服傳動系統(tǒng)?
2023-02-01 11:08:23228 變化的自動控制系統(tǒng)。它的主要任務(wù)是按控制命令的要求、對功率進(jìn)行放大、變換與調(diào)控等處理,使驅(qū)動裝置輸出的力矩、速度和位置控制非常靈活方便。在很多情況下,伺服系統(tǒng)專指被控制量(系統(tǒng)的輸出量)是機(jī)械位移或位移速度、加速度的反饋控制
2023-02-08 14:11:461788 伺服電機(jī)的工作溫度要求也會因電機(jī)和驅(qū)動器的型號和規(guī)格而有所不同,但通常的工作溫度范圍在0℃-50℃之間。在一些特殊應(yīng)用場合,伺服電機(jī)可能需要在更高或更低的溫度范圍內(nèi)工作,這時需要根據(jù)具體的應(yīng)用情況選用合適的型號和規(guī)格的電機(jī)和驅(qū)動器。
2023-03-03 11:19:046688 交流伺服系統(tǒng)按照電機(jī)類型的不同可以分為兩種:異步伺服系統(tǒng)和同步伺服系統(tǒng)。根據(jù)控制器的不同,交流伺服系統(tǒng)又可以分為模擬伺服系統(tǒng)和數(shù)字伺服系統(tǒng)。
2023-03-07 14:20:44949 機(jī)電伺服系統(tǒng)廣泛應(yīng)用于各種機(jī)械設(shè)備中,其種類和形式多種多樣。以下列舉一些常見的機(jī)電伺服系統(tǒng):
伺服電機(jī)系統(tǒng):伺服電機(jī)系統(tǒng)是一種利用電機(jī)控制機(jī)械運動的伺服系統(tǒng),它通常包括電機(jī)、編碼器、控制器
2023-03-07 14:31:081421 伺服控制系統(tǒng)和伺服驅(qū)動器是兩個不同的概念。
2023-03-21 17:10:212277 伺服系統(tǒng)是用來精確地跟隨或復(fù)現(xiàn)某個過程的自動控制系統(tǒng),能使物體的位置、方位、狀態(tài)等輸出量能夠跟隨輸入目標(biāo)進(jìn)行任意變化。伺服式液位計是一種多功能儀表,由接線端子部分、電子部分、磁鼓室、測量鋼絲、浮子
2023-05-15 08:48:30443 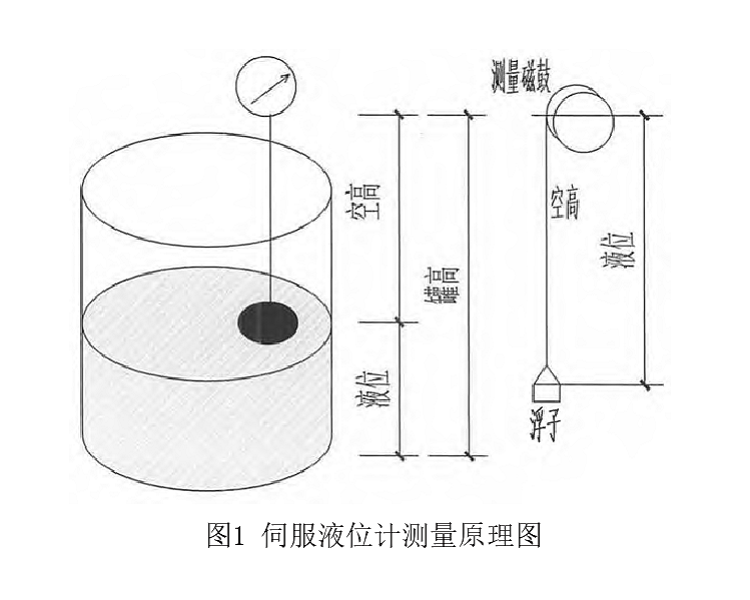
數(shù)控系統(tǒng)輸入至進(jìn)給驅(qū)動單元的除了速度控制信號外,還有伺服使能控制信號,一般為DC + 24 V繼電器線圈電壓。檢查數(shù)控系統(tǒng)是否有速度控制信號輸出; 檢查使能信號是否接通。
2023-05-25 08:53:251269 的控制目的。既然伺服驅(qū)動器如此的重要,那我們對于它都應(yīng)該有哪些要求呢?簡單的來說說:1、伺服驅(qū)動器的調(diào)速范圍一定要夠?qū)挘抢媳3忠环N電機(jī)轉(zhuǎn)速,那我們要它沒有任何意
2023-01-13 16:20:16814 
伺服系統(tǒng)主要由伺服控制器、驅(qū)動電路、伺服電動機(jī)及相應(yīng)反饋檢測器件組成。1.伺服系統(tǒng)原理當(dāng)人為的給定控制信號并被伺服控制系統(tǒng)接收時,執(zhí)行機(jī)構(gòu)就會按照控制信號的指令進(jìn)行一系列的運動和動作;如果不再
2023-08-27 08:08:421729 伺服系統(tǒng)(servomechanism)又稱 隨動系統(tǒng) ,是用來精確地跟隨或復(fù)現(xiàn)某個過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化
2023-09-27 10:30:361296 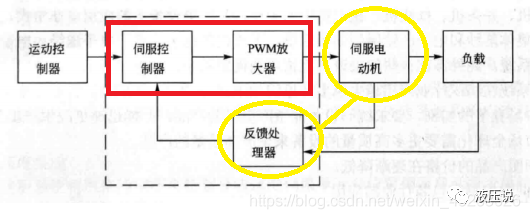
電子發(fā)燒友網(wǎng)站提供《16位單片機(jī)數(shù)控系統(tǒng)對普通車床進(jìn)給系統(tǒng)進(jìn)行改造設(shè)計方案.pdf》資料免費下載
2023-10-19 10:11:100 交流伺服系統(tǒng)的分類及應(yīng)用場合交流伺服系統(tǒng)按照電機(jī)類型的不同可以分為兩種:異步伺服系統(tǒng)和同步伺服系統(tǒng)。根據(jù)控制器的不同,交流伺服系統(tǒng)又可以分為模擬伺服系統(tǒng)和數(shù)字伺服系統(tǒng)。異步伺服系統(tǒng):異步伺服系統(tǒng)
2023-11-03 08:07:41522 。它的主要任務(wù)是按控制命令的要求、對功率進(jìn)行放大、變換與調(diào)控等處理,使驅(qū)動裝置輸出的力矩、速度和位置控制非常靈活方便。在自動化領(lǐng)域很多情況下,伺服系統(tǒng)專指被控制量(系統(tǒng)的輸出量)是機(jī)械位移或位移速度
2023-12-05 10:25:03479 伺服電機(jī)(servo motor )是指在伺服系統(tǒng)中控制機(jī)械元件運轉(zhuǎn)的發(fā)動機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。根據(jù)使用電源不同:分直流伺服電機(jī)和交流伺服電機(jī)。他兩在功能上的區(qū)別:交流伺服要好一些,因為
2023-12-20 16:37:35339 伺服電機(jī)(servo motor )是指在伺服系統(tǒng)中控制機(jī)械元件運轉(zhuǎn)的發(fā)動機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。根據(jù)使用電源不同:分直流伺服電機(jī)和交流伺服電機(jī)。他兩在功能上的區(qū)別:交流伺服要好一些,因為
2023-12-11 17:14:52230 ? ? ? ?伺服電機(jī)是自動控制裝置中被用作執(zhí)行元件的微特電機(jī),其功能是將電信號轉(zhuǎn)換成轉(zhuǎn)軸的角位移或角速度。 伺服電機(jī)分為交流伺服和直流伺服兩大類 交流伺服電機(jī)的基本構(gòu)造與交流感應(yīng)電動機(jī)(異步電機(jī)
2023-12-11 16:58:01608 利用伺服進(jìn)給系統(tǒng)虛擬[1]樣機(jī)提供的集成環(huán)境對機(jī)械系統(tǒng)和電機(jī)控制系統(tǒng)進(jìn)行聯(lián)合仿真[2]分析,是一種全新的設(shè)計方法。在傳統(tǒng)的復(fù)雜機(jī)械系統(tǒng)[3]設(shè)計過程中,機(jī)械工程師和控制工程師雖然在共同設(shè)計開發(fā)一個系統(tǒng)
2024-01-19 14:48:05105 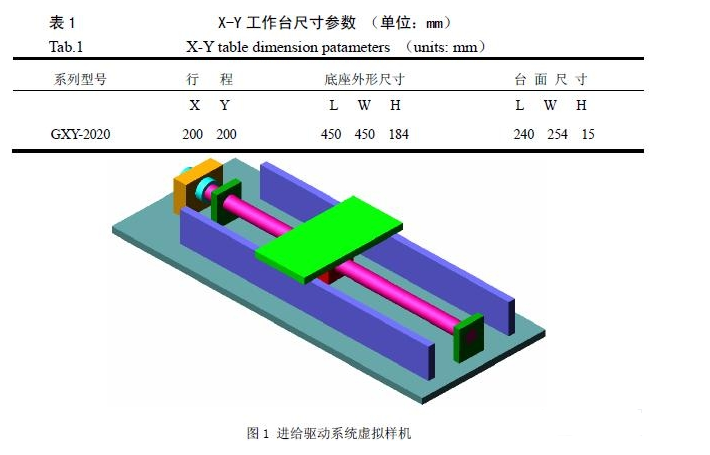
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論