伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2022-08-17 11:01:34 6057
6057 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2023-05-16 15:56:152478 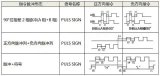
三菱伺服電機(jī)有哪3種轉(zhuǎn)矩控制模式?三菱伺服電機(jī)的轉(zhuǎn)矩控制模式有哪三種? 在三菱伺服電機(jī)轉(zhuǎn)矩控制分為位置控制和速度模式控制,有轉(zhuǎn)矩控制,這些都應(yīng)該知道一點(diǎn),下面小編為您分享三菱伺服電機(jī)哪三種轉(zhuǎn)矩控制
2021-06-28 08:15:45
環(huán)境介紹停止模式(STOP)管腳事件喚醒的實(shí)現(xiàn)(HAL庫(kù))。STOP模式只是停止代碼執(zhí)行,喚醒(其實(shí)是continue的作用)后繼續(xù)執(zhí)行后面的代碼,而不是重啟之后從初始代碼開(kāi)始執(zhí)行。2. 低功耗模式STM32L4的低功耗模式,相比其它系列的芯片,多了幾種:三種STOP模式的區(qū)別,可以參考文檔:RM03
2022-02-11 07:45:55
STM32F103xC、 STM32F103xD和STM32F103xE增強(qiáng)型產(chǎn)品支持三種低功耗模式,可以在要求低功耗、短啟動(dòng)時(shí)間和多種喚醒事件之間達(dá)到最佳的平衡。 ● 睡眠模式在睡眠模式,只有
2021-07-23 09:04:12
三種啟動(dòng)模式對(duì)應(yīng)的存儲(chǔ)介質(zhì)均是芯片內(nèi)置的,它們分別是:1)用戶閃存 = 芯片內(nèi)置的Flash。2)SRAM = 芯片內(nèi)置的RAM區(qū),就是內(nèi)存啦。3)系統(tǒng)存儲(chǔ)器 = 芯片內(nèi)部一塊特定的區(qū)域,芯片出廠時(shí)在這個(gè)區(qū)域預(yù)置了一段Bootloader,就是通常說(shuō)的ISP程序。這個(gè)區(qū)域的內(nèi)容在...
2021-07-22 08:33:03
什么是Power Supply?開(kāi)關(guān)電源的元件構(gòu)成三種基本的非隔離開(kāi)關(guān)電源三種基本的隔離開(kāi)關(guān)電源反激變換器(Flyback)工作原理 (電流連續(xù)模式)反激變換器(Flyback)工作原理 (電流斷續(xù)模式)反激變換器(Flyback)工作原理(1)反激變換器(Fly...
2021-10-29 06:19:04
輸出電壓準(zhǔn)確度的應(yīng)用。此類應(yīng)用包括為嵌入式或計(jì)算系統(tǒng)中的處理器內(nèi)核供電,以及工業(yè)自動(dòng)化和汽車信息娛樂(lè)系統(tǒng)。 結(jié)論 對(duì)于不同的應(yīng)用,“電壓
模式”、“遲滯”和“基于遲滯”等
三種主要的電源
控制拓?fù)涓饔?/div>
2017-10-08 22:09:25
Teledyne e2v為系統(tǒng)設(shè)計(jì)師提供的定制方案處理器功耗的背景知識(shí)三種調(diào)整處理器系統(tǒng)功耗的方法
2021-01-01 06:04:09
三種遠(yuǎn)程測(cè)控終端(RTU)產(chǎn)品之間的比較
2021-05-28 06:27:08
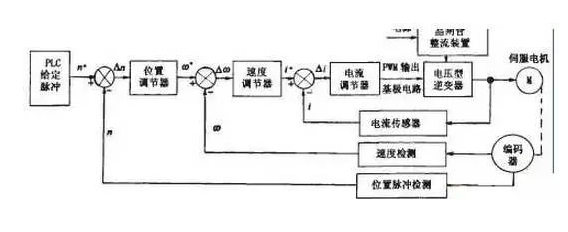
伺服控制的三環(huán)的控制原理是什么?
2021-10-11 06:28:46
伺服電機(jī)三環(huán)控制原理是什么
2021-10-13 06:13:07
字體進(jìn)入電工電氣學(xué)習(xí)公眾號(hào),右上角“···”選擇設(shè)為星標(biāo),置頂公眾號(hào)】伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢? 一、伺服電機(jī)脈沖控制方式
2020-09-29 07:57:38
伺服電機(jī)的應(yīng)用領(lǐng)域有哪些?伺服電機(jī)有哪些控制模式?
2021-09-27 06:21:31
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。接下來(lái),給大家介紹伺服電機(jī)的三種控制方式。如果您對(duì)電機(jī)的速度
2018-11-02 09:40:43
一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。大多數(shù)人想知道的就是這三種控制方式具體根據(jù)什么來(lái)選擇的?
2021-01-29 07:28:36
伺服電機(jī)的三種控制方式
2021-01-21 06:45:01
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。 接下來(lái),給大家介紹伺服電機(jī)的三種控制方式。如果您對(duì)電機(jī)
2020-07-01 07:00:00
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。接下來(lái),給大家介紹伺服電機(jī)的三種控制方式。如果您對(duì)電機(jī)的速度
2018-11-01 10:59:41
伺服電機(jī)的轉(zhuǎn)矩控制模式是什么意思?伺服電機(jī)的轉(zhuǎn)矩控制模式有何作用?
2021-10-08 07:06:16
伺服有哪幾種控制方式?伺服的三種控制方式具體根據(jù)什么來(lái)選擇的?
2021-10-11 08:17:43
ARM指令的三種尋址模式: 1)基址偏移LDR R1,[R2,#-0x10]2)基址偏移前變址LDR R1,[R2,#-0x10]! // R1 =*(R2-0x10),R2=R2-0x103)基址
2021-07-16 07:33:53
對(duì)于Bluetooth BLE CC2540,看到資料上提到了三種省電模式。是否有什么文檔可以讓我更細(xì)致地了解這三種模式。比如說(shuō)在不同的模式下:1)哪些功能被關(guān)掉了;2)對(duì)于藍(lán)牙的連接來(lái)說(shuō)意味著
2020-08-27 07:17:31
的輸出負(fù)載從滿載到輕載然后到空載變化的過(guò)程中,系統(tǒng)的工作模式也會(huì)發(fā)生相應(yīng)的改變。下面以降壓型Buck變換器為例說(shuō)明DCDC變換器輕載時(shí)的工作模式。降壓型Buck變換器在輕載有三種工作模式:突發(fā)模式、跳
2016-08-31 17:01:16
。 下面以降壓型Buck變換器為例說(shuō)明DCDC變換器輕載時(shí)的工作模式。降壓型Buck變換器在輕載有三種工作模式:突發(fā)模式、跳脈沖模式和強(qiáng)迫連續(xù)模式。下面將詳細(xì)的闡述了這三種模式的工作作原理及其
2019-03-14 18:00:00
本帖最后由 一只耳朵怪 于 2018-5-25 14:55 編輯
DM6446內(nèi)核有三種頻率,有三種處理速度;這個(gè)速度和頻率是對(duì)應(yīng)的嗎?由什么決定?最多可以接多少個(gè)TVP5146(單片傳輸速度不夠)?
2018-05-25 06:47:06
FCC三種認(rèn)證方式主要是針對(duì)不同類別產(chǎn)品。無(wú)線、射頻類產(chǎn)品必須申請(qǐng)F(tuán)CC ID,電腦及電腦周邊產(chǎn)品需申請(qǐng)F(tuán)CC DOC或ID,其它產(chǎn)品一般申請(qǐng)F(tuán)CC VOC即可。三種認(rèn)證方式中級(jí)別ID最高,需TCB
2015-10-22 14:11:47
HAL庫(kù)中UART的三種收發(fā)方式是什么?
2022-02-18 06:33:52
HFSS三種輻射邊界的區(qū)別與選擇技巧是什么?
2021-05-21 06:54:59
QSPI特點(diǎn)QSPI三種工作模式
2020-12-31 06:36:55
如何在不同的下載方式中選擇STM32的啟動(dòng)模式呢?STM32三種BOOT啟動(dòng)方式的設(shè)置與應(yīng)用分別是什么?
2022-01-18 07:01:55
STM32三種啟動(dòng)模式對(duì)應(yīng)的存儲(chǔ)介質(zhì)均是芯片內(nèi)置的,它們是:1)用戶閃存 = 芯片內(nèi)置的Flash。2)SRAM = 芯片內(nèi)置的RAM區(qū),就是內(nèi)存啦。3)系統(tǒng)存儲(chǔ)器 = 芯片內(nèi)部一塊特定的區(qū)域,芯片
2021-12-09 08:14:46
STM32三種啟動(dòng)模式對(duì)應(yīng)的存儲(chǔ)介質(zhì)均是芯片內(nèi)置的,它們是:用戶閃存: BOOT1=xBOOT0=0芯片內(nèi)置的Flash。SRAM:BOOT1=1BOOT0=1芯片內(nèi)置的RAM 區(qū),就是內(nèi)存啦。系統(tǒng)存儲(chǔ)器:BOO
2021-08-05 08:14:55
STM32三種啟動(dòng)模式對(duì)應(yīng)的存儲(chǔ)介質(zhì)是什么?
2022-01-27 07:00:03
STM32三種啟動(dòng)方式是什么
2021-12-15 07:16:54
stm32L151低功耗心得前言STM32低功耗的三種模式低功耗的硬件設(shè)計(jì)前言最近結(jié)束了一個(gè)STM32L151的項(xiàng)目,項(xiàng)目基本條件就是電池供電、物聯(lián)化,還有一堆通訊式的外設(shè)。我以前主要以榨干單片機(jī)
2021-08-10 07:06:28
01STM32的三種啟動(dòng)模式STM32有三種啟動(dòng)模式:FLASH啟動(dòng)、SRAM啟動(dòng)和系統(tǒng)存儲(chǔ)器啟動(dòng),通常三種啟動(dòng)方式由外部引腳boot0和boot1的電平?jīng)Q定。每個(gè)系列boot0和boot1電平對(duì)應(yīng)
2021-08-18 07:52:23
STM32的三種Boot模式一、BOOT模式簡(jiǎn)介1. 三種BOOT模式:所謂啟動(dòng),一般來(lái)說(shuō)就是指我們下好程序后,重啟芯片時(shí),SYSCLK的第4個(gè)上升沿,BOOT引腳的值將被鎖存。用戶可以通過(guò)設(shè)置
2021-12-10 06:54:52
STM32的三種Boot模式有何差異呢?如何去驗(yàn)證這種差異呢?
2021-11-26 07:15:38
如有錯(cuò)誤,歡迎指正,謝謝!目錄一、STM32的三種Boot模式的差異二、創(chuàng)建基于MDK創(chuàng)建純匯編語(yǔ)言的STM32工程模板三、匯編基本語(yǔ)法的學(xué)習(xí)四、編程練習(xí)一、STM32的三種Boot模式的差異參考自
2021-12-20 07:54:42
淺識(shí)STM32的三種boot模式文章目錄淺識(shí)STM32的三種boot模式任務(wù)摘要一、認(rèn)識(shí)boot1.三種BOOT模式介紹2.開(kāi)發(fā)BOOT模式選擇3.STM32三種啟動(dòng)模式4.三種模式的存儲(chǔ)地址二
2021-12-10 07:46:37
目錄單片機(jī)的低功耗STM32電源框圖STM32的三種低功耗模式低功耗配置圖(詳細(xì)配置參考STM32參考手冊(cè))電源控制寄存器部分相關(guān)代碼附錄單片機(jī)的低功耗很多單片機(jī)有低功耗模式,STM32也不例外。在
2022-02-23 06:03:42
一、啟動(dòng)模式(Boot modes)閱讀:STM32中文參考手冊(cè)_V10.pdf 查看啟動(dòng)配置(Boot modes)。在STM32F10xxx里,可以通過(guò)BOOT[1:0]引腳選擇三種不同啟動(dòng)模式
2021-08-05 07:25:51
系統(tǒng)復(fù)位后,SYSCLK的第4個(gè)上升沿,BOOT引腳的值將被鎖存。用戶可以通過(guò)BOOT[1:0]引腳選擇三種不同的啟動(dòng)模式。從待機(jī)狀態(tài)退出模式時(shí),BOOT引腳的值將被重新鎖存。因此在待機(jī)模式下
2021-08-05 08:10:35
USB設(shè)備端點(diǎn)有三種操作模式,包括自動(dòng)驗(yàn)證模式、手動(dòng)驗(yàn)證模式和Fly模式。 它們的功能是什么?
2020-12-03 06:46:02
刷新模式屬于波形圖表所特有的。在波形圖表-高級(jí)-掃描方式有三種顯示掃描方式,由于波形圖表自帶存儲(chǔ)1024各點(diǎn)的內(nèi)存,等存儲(chǔ)用完后才會(huì)顯示各種方式的不同。掃描圖表和帶狀圖其實(shí)一樣,都是從頭重新掃描
2018-10-13 12:29:01
while的三種使用形式是什么樣的?
2021-11-02 08:35:34
系統(tǒng)本質(zhì)上是一種隨動(dòng)系統(tǒng)。只不過(guò)被控量是位移或是其對(duì)時(shí)間的導(dǎo)數(shù)。如果要問(wèn)什么是隨動(dòng)系統(tǒng),就是一個(gè)系統(tǒng)的輸出盡可能以最快,最精確的方式復(fù)現(xiàn)輸入信號(hào)。其衡量的指標(biāo)有超調(diào)量、延遲。伺服系統(tǒng)有三種控制方式:速度控制
2017-07-05 22:02:40
一燈雙控的三種接線方法有哪些利弊
2021-03-11 07:10:04
什么是Boot模式?STM32三種Boot模式有什么差異?怎么實(shí)現(xiàn)STM匯編程序設(shè)計(jì)?
2021-11-29 06:04:54
本文逐一介紹三種視頻數(shù)字接口的標(biāo)準(zhǔn)。
2021-06-03 06:24:31
1、低功耗藍(lán)牙的GAP(通用屬性規(guī)范)有四個(gè)角色: 廣播者(廣播者),觀察者(掃描者),外圍設(shè)備(通常說(shuō)的從設(shè)備),中央設(shè)備(通常說(shuō)的主設(shè)備)2、三種發(fā)現(xiàn)模式: 不可發(fā)現(xiàn)模式。有限可發(fā)現(xiàn)模式。‘一般可發(fā)現(xiàn)模式。它們三個(gè)共同由一個(gè)AD信息標(biāo)識(shí)設(shè)置,也就是2個(gè)bit位決定。不可發(fā)現(xiàn)模式:...
2021-12-23 07:55:05
從不同的側(cè)重點(diǎn)給出了幾種拓?fù)洌瑢?duì)其進(jìn)行分析比較三種拓?fù)溆衅涓髯缘挠腥秉c(diǎn),如何來(lái)選擇它們?
2021-04-07 06:05:16
刷機(jī)時(shí)用到的三種工具分別是什么?SD卡有何作用?fastboot是什么?fastboot有何作用?
2021-12-27 06:18:48
卷積的三種模式:full same valid
2020-05-22 17:13:35
伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2021-01-21 07:38:46
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2021-01-22 07:46:05
嵌入式三種定時(shí)器的區(qū)別在哪?嵌入式三種定時(shí)器的特點(diǎn)分別有哪些呢?
2021-12-27 06:49:27
常用的FBAR模型有哪三種?
2021-03-11 06:16:18
藍(lán)牙無(wú)線組網(wǎng)的優(yōu)點(diǎn)是什么?常見(jiàn)的三種無(wú)線接入方式是什么?藍(lán)牙無(wú)線組網(wǎng)原理與上網(wǎng)方案分享
2021-05-26 06:33:11
伺服電機(jī)三環(huán)控制的原理是什么?伺服電機(jī)三環(huán)控制分別是哪三環(huán)?影響伺服電機(jī)三環(huán)控制的因素有哪些?
2021-09-27 08:20:27
怎樣用C語(yǔ)言實(shí)現(xiàn)三種模式的切換,并且在進(jìn)入一種模式后,可以實(shí)現(xiàn)假的死循環(huán)。當(dāng)模式切換時(shí),進(jìn)入另一種模式的死循環(huán)。(注:用于51單片機(jī))
2015-04-30 00:44:18
LABVIEW 小白 想做一個(gè)軸承故障檢測(cè)系統(tǒng) 需要選擇軸承內(nèi)圈外圈滾子三種故障計(jì)算公式算出的結(jié)果 要用枚舉控件有人能給編一下嗎就類似于用枚舉控件選擇三種不同類型的數(shù)值 可用數(shù)值常量代替
2018-04-27 16:51:41
一、什么是力矩控制永磁同步電機(jī)在汽車上的應(yīng)用越來(lái)越廣泛,從動(dòng)力驅(qū)動(dòng)到轉(zhuǎn)向剎車的執(zhí)行機(jī)構(gòu),都可以見(jiàn)到其蹤影。今天想談?wù)動(dòng)来磐诫姍C(jī)的控制。做控制的人都知道,任何電機(jī)的控制,無(wú)非三種不同的控制目標(biāo):位置
2021-08-27 07:27:15
目錄一、電機(jī)的三種控制模式1、力矩控制模式2、速度控制模式3、位置控制模式二、硬件說(shuō)明1、硬件清單2、硬件連接三、程序演示1、力矩控制2、速度控制3、角度控制?一、電機(jī)的三種控制模式1、力矩控制模式
2021-09-07 09:20:49
第三種WiFi模塊是什么?有什么特點(diǎn)?
2021-05-14 06:49:07
編譯的三種類型是什么?ARM_Linux制作嵌入式遠(yuǎn)程調(diào)試工具
2021-12-24 06:42:58
串口模式實(shí)現(xiàn)有三種1.普通模式:在主函數(shù)中接收函數(shù)2.中斷模式:產(chǎn)生的不影響主程序運(yùn)行3. DMA模式:與主函數(shù)互不影響,獨(dú)立運(yùn)行本文記錄三種DMA模式。
2022-02-28 07:54:02
原理圖的Grid Preset的默認(rèn)情況下有三種設(shè)置,請(qǐng)問(wèn)這三種設(shè)置有什么區(qū)別,是怎么使用的
2019-04-10 07:35:06
請(qǐng)群主詳細(xì)解釋下這三種啟動(dòng)方式,看了參考資料不是很明白其意!謝謝!
2019-07-17 04:35:12
1、zstack有定義三種安全模式:ZG_SECURITY_PRO_STANDARD(同 ZG_SECURITY_RESIDENTIAL),ZG_SECURITY_PRO_HIGH
2018-08-17 07:32:41
我現(xiàn)在想做一個(gè)跑馬燈,這個(gè)跑馬燈有十種模式,第十種模式要求有三種音樂(lè)。,還得有數(shù)碼管顯示第幾種模式。可以無(wú)線遙控。求哪位大神可以幫我。小女子必有重謝。
2018-07-19 04:49:55
進(jìn)程類型進(jìn)程的三種狀態(tài)
2021-04-02 07:06:39
三電平結(jié)構(gòu)的變頻器有一個(gè)問(wèn)題就是中點(diǎn)電位不平衡,在軟件控制層面有三種平衡模式,默認(rèn)模式、比例模式和PI模式,或許叫法有所不同,總之是這三種平衡模式吧,請(qǐng)問(wèn)這三種平衡模式是什么意思,具體而言有什么不同,這三種模式是如何對(duì)中點(diǎn)電壓平衡做補(bǔ)償?shù)模?
2024-01-09 16:12:28
伺服馬達(dá)選型和使用一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。富士伺服馬達(dá)如果上位控制器有比
2020-06-12 11:46:133508 伺服電機(jī)的控制模式:1、位置模式,2、速度模式。
2019-10-07 16:48:0014851 伺服電機(jī)作為一個(gè)高精度的控制電機(jī),已被廣泛的運(yùn)用與各個(gè)行業(yè)。一般地,伺服電機(jī)在運(yùn)用過(guò)程中,有三種控制場(chǎng)景模式。分別為位置模式、速度模式、轉(zhuǎn)矩模式。
2019-12-22 10:08:0110105 的轉(zhuǎn)速隨控制電壓的大小而變化,當(dāng)控制電壓的相位相反時(shí),伺服電動(dòng)機(jī)將反轉(zhuǎn)。因此,交流伺服電機(jī)使用的過(guò)程中,做好控制工作很重要。那么交流伺服電機(jī)有哪三種控制方式呢?
2020-01-09 14:42:0725462 我們?cè)谄綍r(shí)控制伺服電機(jī)的時(shí)候,經(jīng)常用到的控制模式就是三種模式分別是速度控制模式、位置控制模式、轉(zhuǎn)矩控制模式。現(xiàn)以三菱的伺服驅(qū)動(dòng)器為例,下面分別了解一下每個(gè)模式的控制接線及其注意事項(xiàng)。
2020-11-20 11:28:1918257 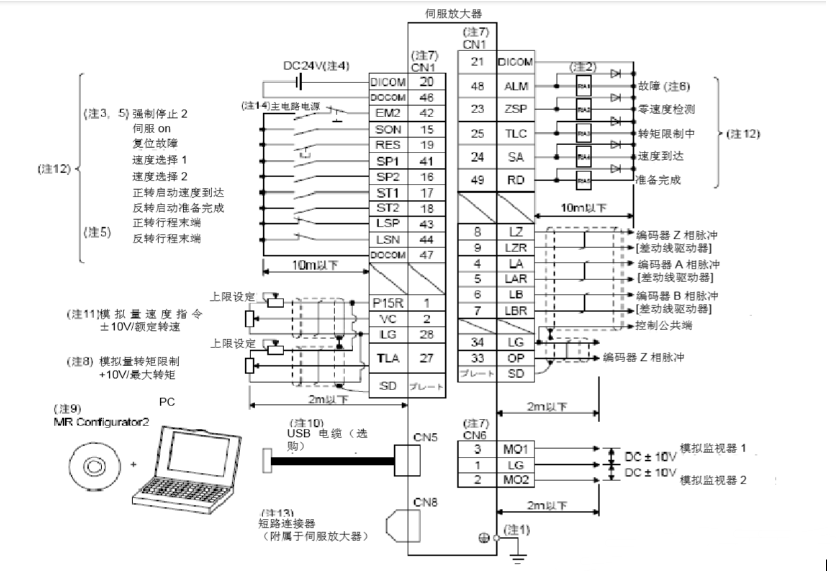
一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。大多數(shù)人想知道的就是這三種控制方式具體根據(jù)什么來(lái)選擇的?
2020-12-14 23:12:304529 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2021-01-20 10:34:52 20
20 一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。大多數(shù)人想知道的就是這三種控制方式具體根據(jù)什么來(lái)選擇的?
2021-01-22 06:30:447 伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2021-02-03 06:46:1237 伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2023-07-26 09:22:20980 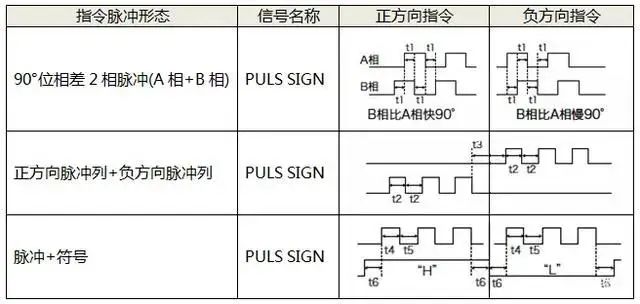
在位置模式控制中,伺服電機(jī)通過(guò)傳感器獲取自身位置信息和目標(biāo)位置信息,然后計(jì)算出兩者之間的差值,進(jìn)而控制電機(jī)輸出的電流、電壓、轉(zhuǎn)矩或速度,實(shí)現(xiàn)電機(jī)的精準(zhǔn)旋轉(zhuǎn)。在該模式下,伺服電機(jī)的準(zhǔn)確度非常高,可以在微小的角度范圍內(nèi)進(jìn)行控制。
2023-08-26 11:07:134544  電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論