傳統(tǒng)的電流式控制方法是檢測流經(jīng)繞組的電流,并將反饋信號送到控制芯片,然后由控制芯片決定是增加還是降低繞組電流,以取得所需的電流強度。這種控制方法使電機在寬轉(zhuǎn)速和寬電源電壓范圍內(nèi)保持理想的轉(zhuǎn)矩,非常適用于全步進(jìn)和半步進(jìn)電機驅(qū)動,而且實現(xiàn)起來非常容易。
2016-01-18 11:32:09 1417
1417 步進(jìn)電機和伺服電機的性能差異源自他們不同的電機設(shè)計方案。步進(jìn)電機的極數(shù)比伺服電機多得多,因此步進(jìn)電機旋轉(zhuǎn)一整圈,所需的繞組電流交換次數(shù)要多得多,從而導(dǎo)致在速度增加的情況下,其轉(zhuǎn)矩迅速下降。
2023-07-13 10:53:45751 
轉(zhuǎn)矩(HOLDING TORQUE)是指步進(jìn)電機通電但沒有轉(zhuǎn)動時,定子鎖住轉(zhuǎn)子的力矩。它是步進(jìn)電機最重要的參數(shù)之一,通常步進(jìn)電機在低速時的力矩接近保持轉(zhuǎn)矩。由于步進(jìn)電機的輸出力矩隨速度的增大而不斷衰減
2011-08-04 16:52:17
廣泛。3.什么是保持轉(zhuǎn)矩(HOLDING TORQUE)?保持轉(zhuǎn)矩(HOLDING TORQUE)是指步進(jìn)電機通電但沒有轉(zhuǎn)動時,定子鎖住轉(zhuǎn)子的力矩。它是步進(jìn)電機最重要的參數(shù)之一,通常步進(jìn)電機在低速
2014-01-21 14:55:59
、過載能力不同 步進(jìn)電機一般不具有過載能力。交流伺服電機具有較強的過載能力。以山洋交流伺服系統(tǒng)為例,它具有速度過載和轉(zhuǎn)矩過載能力。其最大轉(zhuǎn)矩為額定轉(zhuǎn)矩的二到三倍,可用于克服慣性負(fù)載在啟動瞬間的慣性力
2020-06-30 15:39:11
步進(jìn)電機中的力矩(g.cm),轉(zhuǎn)矩(n.m),扭矩(kg.m)有什么區(qū)別?步進(jìn)電機中的力矩(g.cm),轉(zhuǎn)矩(n.m),扭矩(kg.m)有什么區(qū)別?力矩、轉(zhuǎn)矩和扭矩在步進(jìn)電機中其實就是一樣
2021-09-15 06:01:52
步進(jìn)電機力矩的怎么計算?步進(jìn)電機力矩計算方法。選擇步進(jìn)電機時,首先要保證步進(jìn)電機的輸出功率大于負(fù)載所需的功率。在選用功率步進(jìn)電機時,首先要計算機械系統(tǒng)的負(fù)載轉(zhuǎn)矩,電機的矩頻特性能滿足機械負(fù)載并有一定
2021-09-03 07:16:10
步進(jìn)電機可以連續(xù)運轉(zhuǎn)嗎?步進(jìn)電機長時間連續(xù)運轉(zhuǎn)會致使電機溫度上升,當(dāng)超過電機內(nèi)部的耐熱等級,會使得絕緣性能劣化。當(dāng)使用步進(jìn)電機時只要保持電機外殼表面溫度在100度以下,即可連續(xù)運轉(zhuǎn)。您可通過以下方法
2021-07-08 07:21:56
步進(jìn)電機基礎(chǔ)(3.1)-步進(jìn)電機的原理與特性之基礎(chǔ)理論前言基本信息公式前言說明步進(jìn)電機的原理與特性之基礎(chǔ)理論3. 1 基礎(chǔ)理論1. 轉(zhuǎn)矩的產(chǎn)生及負(fù)載角1) PM型電機的轉(zhuǎn)矩及負(fù)載角2) VR型電機
2021-06-30 07:21:55
。3.什么是保持轉(zhuǎn)矩(HOLDING TORQUE)?保持轉(zhuǎn)矩(HOLDING TORQUE)是指步進(jìn)電機通電但沒有轉(zhuǎn)動時,定子鎖住轉(zhuǎn)子的力矩。它是步進(jìn)電機最重要的參數(shù)之一,通常步進(jìn)電機在低速時的力矩
2012-07-14 21:13:39
:轉(zhuǎn)子的加速度慢子步進(jìn)電機的旋轉(zhuǎn)磁場,即低于換相速度時,步進(jìn)電機會產(chǎn)生丟步。這是因為輸入電機的電能不足,在步進(jìn)電機中產(chǎn)生的同步力矩?zé)o法使轉(zhuǎn)子速度跟隨定子磁場的旋轉(zhuǎn)速度,從而引起丟步。解決方法: ①使步進(jìn)
2023-04-15 16:33:58
,使得轉(zhuǎn)子在一個整步中的不同位置(64細(xì)分等)靜態(tài)指標(biāo)術(shù)語:相數(shù):相數(shù)越多,步距角越小拍數(shù):指電機轉(zhuǎn)過一個齒輪角所需脈沖數(shù)步距角:一個脈沖信號所對應(yīng)電機轉(zhuǎn)動的角度定位轉(zhuǎn)矩:電機在不通電狀態(tài)下,電機轉(zhuǎn)子自身的鎖定力矩靜轉(zhuǎn)矩:電機在額定靜態(tài)電壓作用下,電機不作旋轉(zhuǎn)運動時,電機轉(zhuǎn)軸的鎖定力矩,動態(tài)...
2021-06-30 07:11:45
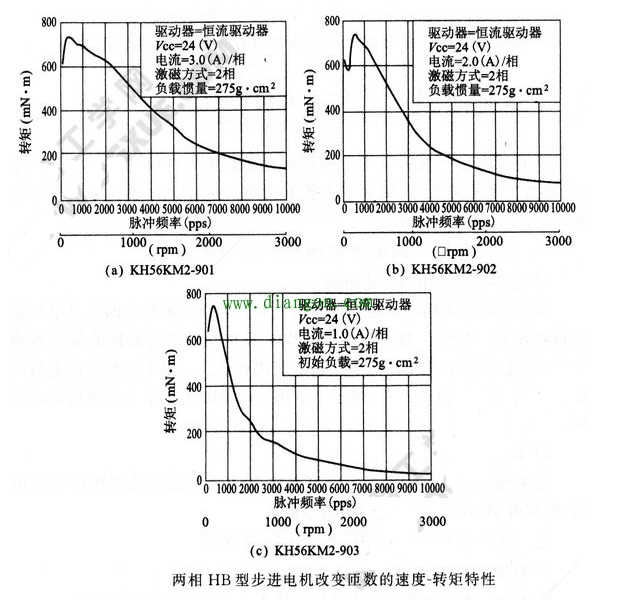
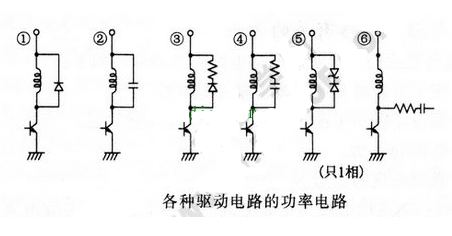
接線2 . 步進(jìn)電機在高速時增加轉(zhuǎn)矩的方法1) 降低匝數(shù),使L減小2) 永久磁鐵的磁通要小3)選擇步距角大的電機3. 步進(jìn)電機高速運行時,在驅(qū)動電路方面提高轉(zhuǎn)矩的方法1)提高驅(qū)動電路的電壓2)降低驅(qū)動電路關(guān)斷時的電流前言基本信息名稱描述說明教材名稱步進(jìn)電機應(yīng)用技術(shù)作者坂本正文
2021-07-07 07:29:39
步進(jìn)電機的轉(zhuǎn)矩為什么會隨著速度增大而降低?
2023-11-03 07:58:59
步進(jìn)電機的原理與特性之基本特性 相關(guān)資料分享,步進(jìn)電機基礎(chǔ)(3.2)-步進(jìn)電機的原理與特性之基本特性前言基本信息公式前言說明基本特性1. 靜態(tài)轉(zhuǎn)矩特性2. 動態(tài)轉(zhuǎn)矩特性1) 脈沖頻率-轉(zhuǎn)矩特性2
2021-07-08 08:27:07
距角的要求。如果使用細(xì)分驅(qū)動器,則‘相數(shù)’將變得沒有意義,用戶只需在驅(qū)動器上改變細(xì)分?jǐn)?shù),就可以改變步距角。 保持轉(zhuǎn)矩(HOLDING TORQUE): 是指步進(jìn)電機通電但沒有轉(zhuǎn)動時,定子鎖住
2014-01-11 14:49:42
步進(jìn)電機基礎(chǔ)(6.1)-步進(jìn)電機的特性測量方法-靜態(tài)特性前言基本信息前言說明說明6.1 靜態(tài)特性1 . 靜態(tài)轉(zhuǎn)矩特性2. 靜 態(tài) 轉(zhuǎn) 矩 特 性 測 量1.轉(zhuǎn)矩表:2. 滑輪重量法:3. 應(yīng)力計
2021-07-07 07:28:34
說明根據(jù)我讀的《步進(jìn)電機應(yīng)用技術(shù)》這本書,進(jìn)行的學(xué)習(xí)過程中的知識記錄和心得體會的記錄。6.1 靜態(tài)特性??下面介紹速度-動態(tài)轉(zhuǎn)矩(dynamic torque)特性的測量法。步進(jìn)電機的動態(tài)轉(zhuǎn)矩有最大失步轉(zhuǎn)矩與起動轉(zhuǎn)矩。這兩種轉(zhuǎn)矩隨驅(qū)動頻率的增加而下降,原因是由于線
2021-07-08 07:46:31
一般在步進(jìn)電機的書里面說的大多是這樣的:隨著步進(jìn)電機的脈沖頻率增大,轉(zhuǎn)矩變小。但是都沒有具體說數(shù)學(xué)關(guān)系,有沒有公式之類的描述?
2016-01-18 09:34:00
步進(jìn)電機的轉(zhuǎn)速和轉(zhuǎn)矩是什么關(guān)系?轉(zhuǎn)速高低對轉(zhuǎn)矩的影響?
2023-12-12 07:00:21
。【步進(jìn)電機選型總則】1、首先要保證步進(jìn)電機的輸出功率大于負(fù)載所需的功率。而在選用功率步進(jìn)電機時,首先要計算機械系統(tǒng)的負(fù)載轉(zhuǎn)矩,電機的矩頻特性能滿足機械負(fù)載并有一定的余量保證其運行可靠。在實際工作
2018-10-12 09:50:49
,如果脈沖信號變化太快,步進(jìn)電機由于內(nèi)部的反向電動勢的阻尼作用,轉(zhuǎn)子與定子之間的磁反應(yīng)將跟隨不上電信號的變化,將導(dǎo)致堵轉(zhuǎn)和丟步。所以步進(jìn)電機在高速啟動時,需要采用脈沖頻率升速的方法,在停止時也要有降速
2016-01-11 15:02:13
1. 電機在加速時怎么減小電機轉(zhuǎn)矩的波動?2. 電機在速度控制時怎么保證轉(zhuǎn)矩恒定?
2018-08-28 11:23:09
產(chǎn)生。齒槽轉(zhuǎn)矩是永磁電機特有的問題之一,齒槽轉(zhuǎn)矩是永磁電機繞組不通電時永磁體和定子鐵心之間相互作用產(chǎn)生的轉(zhuǎn)矩,是由永磁體與電樞齒之間相互作用力的切向分量引起的。2:齒槽轉(zhuǎn)矩方向?在圓周方向產(chǎn)生的轉(zhuǎn)矩
2018-10-10 17:56:40
的轉(zhuǎn)矩。在一個BLDC電機中,MCU必須知道轉(zhuǎn)子的位置并能夠在恰當(dāng)?shù)臅r間進(jìn)行整流換向。 BLDC電機的梯形整流換向 對于直流無刷電機的最簡單的方法之一是采用所謂的 梯形整流換向 。圖1:用于BLDC
2021-04-27 06:30:00
PLC高速脈沖輸出功能常用于控制步進(jìn)電機和伺服電機進(jìn)行高精度定位控制,本文一起來學(xué)習(xí)一下步進(jìn)系統(tǒng)的調(diào)試方法。首先要了解PLC如何與步進(jìn)驅(qū)動器連接,通常根據(jù)PLC輸出信號為正還是負(fù)可分共陽接法和共
2023-03-01 10:20:28
的動力,在電磁力的作用下,轉(zhuǎn)子會運動到最大磁導(dǎo)率(或者最小磁阻)的位置,并處于平衡狀態(tài)。2、永磁式步進(jìn)電機。永磁式步進(jìn)電機轉(zhuǎn)子的材料是永磁性的,轉(zhuǎn)子與定子的極數(shù)相同,電機輸出轉(zhuǎn)矩大,步距角相對較大,但工作
2021-09-10 08:45:23
、過載能力不同步進(jìn)電機一般不具有過載能力。交流伺服電機具有較強的過載能力。以松下交流伺服系統(tǒng)為例,它具有速度過載和轉(zhuǎn)矩過載能力。其最大轉(zhuǎn)矩為額定轉(zhuǎn)矩的三倍,可用于克服慣性負(fù)載在啟動瞬間的慣性力矩。步進(jìn)電機
2016-08-19 22:01:04
某3相步進(jìn)電機的矩頻特性曲線所謂矩頻特性曲線,是指步進(jìn)電機扭矩與輸入信號頻率關(guān)系的曲線,其實相當(dāng)于其他電機如伺服電機的轉(zhuǎn)矩-轉(zhuǎn)速特性曲線。從曲線上可以看出,隨著輸入頻率的升高,步進(jìn)電機扭矩下降很快
2016-01-18 14:07:53
本發(fā)明涉及機械控制技術(shù)領(lǐng)域,尤其涉及一種伺服電機的控制方法。背景技術(shù):隨著機械控制領(lǐng)域的高速發(fā)展,對于伺服電機的需要也日益增加,因此對于伺服 電機的控制已引起越來越多人的重視。目前傳統(tǒng)的伺服電機
2021-09-03 08:53:04
細(xì)分原理二相混合式步進(jìn)電機電磁轉(zhuǎn)矩方程p-轉(zhuǎn)子級數(shù);Zr-轉(zhuǎn)子齒數(shù)Zr=2*p;Ta-a相電磁轉(zhuǎn)矩;Tb-b相電磁轉(zhuǎn)矩;Td-定位矩(關(guān)于二相混合式步進(jìn)電機的數(shù)學(xué)模型可參見我的另一篇博客https
2021-07-08 09:59:07
,與轉(zhuǎn)速成反比關(guān)系。 就是說,步進(jìn)電機在低速(每分鐘幾百轉(zhuǎn)或更低轉(zhuǎn)速,其輸出轉(zhuǎn)矩較大),在高速旋轉(zhuǎn)狀態(tài)的轉(zhuǎn)矩就很小了。當(dāng)然,有些工作環(huán)境需要高速電機,就要對步進(jìn)電機的線圈電阻、電感等指標(biāo)進(jìn)行綜合權(quán)衡。選擇
2016-01-18 11:38:08
OUT(牽出)力矩:(也有一些電機廠家稱為脫入力矩) 步進(jìn)電機在不失步的前提下,連續(xù)恒速運轉(zhuǎn)時軸端能夠輸出的最大力矩。PULL IN(牽入)力矩:(也有一些電機廠家稱為脫出力矩) 步進(jìn)電機在不失步的前提下,能夠確保啟動、停車和換向的加速轉(zhuǎn)矩。必須克服轉(zhuǎn)子慣量、外接...
2021-07-07 07:34:28
將轉(zhuǎn)子移至下一個位置所需的轉(zhuǎn)矩較小,因此電流的積累和衰減不再那么極端,并且可以減少過沖。 增加阻尼 步進(jìn)電機共振 添加機械阻尼器是減少步進(jìn)電機共振的一種簡單方法。 機械阻尼器(無論是內(nèi)部粘性
2023-03-10 09:48:47
下也沒有振動。 交流伺服系統(tǒng)具有共振抑制功能,可彌補機械剛性不足,系統(tǒng)內(nèi)部頻率分析功能(FFT)可檢測機器共振點,方便系統(tǒng)調(diào)整。 矩頻特性不同 步進(jìn)電機的輸出轉(zhuǎn)矩隨著轉(zhuǎn)速的增加而減小,在更高的轉(zhuǎn)速
2023-03-10 09:43:01
為恒功率輸出。四、過載能力不同步進(jìn)電機一般不具有過載能力。交流伺服電機具有較強的過載能力。以富士交流伺服系統(tǒng)為例,它具有速度過載和轉(zhuǎn)矩過載能力。其最大轉(zhuǎn)矩為額定轉(zhuǎn)矩的三倍,可用于克服慣性負(fù)載在啟動瞬間
2018-09-04 10:08:37
和伺服電機的性能差異源自他們不同的電機設(shè)計方案。步進(jìn)電機的極數(shù)比伺服電機多得多,因此步進(jìn)電機旋轉(zhuǎn)一整圈,所需的繞組電流交換次數(shù)要多得多,從而導(dǎo)致在速度增加的情況下,其轉(zhuǎn)矩迅速下降。另外,如果達(dá)到了最大轉(zhuǎn)矩
2018-10-17 15:12:02
(HOLDING TORQUE)?保持轉(zhuǎn)矩(HOLDING TORQUE)是指步進(jìn)電機通電但沒有轉(zhuǎn)動時,定子鎖住轉(zhuǎn)子的力矩。它是步進(jìn)電機最重要的參數(shù)之一,通常步進(jìn)電機在低速時的力矩接近保持轉(zhuǎn)矩。由于步進(jìn)電機
2018-08-28 15:36:30
步進(jìn)電機基礎(chǔ)(7.6)-步進(jìn)電機的選擇方法-選擇電機的計算方法前言基本信息前言說明7.6 選擇電機的計算方法1 . 負(fù)載慣量所需的加速轉(zhuǎn)矩和摩擦轉(zhuǎn)矩2 . 計算題【 例 題 1 】【 例 題 2
2021-07-07 07:17:02
轉(zhuǎn)子齒數(shù)和運行拍數(shù)一定的情況下,只 要控制脈沖頻率即可獲得所需速度。由于步進(jìn)電機是借助它的同步轉(zhuǎn)矩而啟動的, 為了不發(fā)生失步,啟動頻率是不高的。特別是隨著功率的增加,轉(zhuǎn)子直徑增大, 慣量增大,啟動頻率
2018-10-31 11:13:25
轉(zhuǎn)矩,與轉(zhuǎn)速成反比。就是說,步進(jìn)電機在低速(每分鐘幾百轉(zhuǎn)或更低轉(zhuǎn)速,其輸出轉(zhuǎn)矩較大),在高速旋轉(zhuǎn)狀態(tài)的轉(zhuǎn)矩(1000轉(zhuǎn)/分--9000轉(zhuǎn))就很小了。當(dāng)然,有些工況環(huán)境需要高速電機,就要對步進(jìn)電動機的線圈
2022-09-05 14:20:59
對比 為了在實驗中測試扭矩性能的這種差異,大小相同的開環(huán)和閉環(huán)步進(jìn)電機系統(tǒng)將獲得相同的慣性負(fù)載。編程命令兩個系統(tǒng)執(zhí)行相同的運動曲線,只是每個系統(tǒng)中的加速度和最高速度會緩慢增加,直到出現(xiàn)定位錯誤為止
2023-03-10 10:06:16
步進(jìn)電機為什么無法高速啟動?步進(jìn)電機有一個技術(shù)參數(shù):空載啟動頻率,即步進(jìn)電機在空載情況下能夠正常啟動的脈沖頻率,如果脈沖頻率高于該值,電機不能正常啟動,可能發(fā)生丟步或堵轉(zhuǎn)。在有負(fù)載的情況下,啟動頻率
2021-07-08 07:03:04
上的電壓,計算出感應(yīng)電勢,根據(jù)感應(yīng)電勢,查步進(jìn)電機感應(yīng)電勢-力矩曲線,得到該采樣點的齒槽轉(zhuǎn)矩。使用該方法可以在齒槽轉(zhuǎn)矩的一個周期內(nèi)進(jìn)行多采樣點測量,但試驗方法復(fù)雜,操作麻煩,步進(jìn)電機感應(yīng)電勢與力矩
2018-11-01 11:13:11
求大神分享伺服電機轉(zhuǎn)矩常數(shù)的標(biāo)定方法
2021-09-26 06:26:42
;可以通過對電機端的電壓降的響應(yīng),進(jìn)行優(yōu)化補償,在不增加電流的情況下,允許電機產(chǎn)出大的轉(zhuǎn)矩。此功能對改善電機低速時溫升也有效。
2016-01-29 10:05:03
齒槽轉(zhuǎn)矩(cogging torque)有誰產(chǎn)生?齒槽轉(zhuǎn)矩是否受定子電流影響?齒槽轉(zhuǎn)矩對電機性能的影響?解決齒槽轉(zhuǎn)矩脈動問題的方法有哪些?
2021-10-29 07:40:01
pwm占空比會影響步進(jìn)電機的轉(zhuǎn)矩嗎?
2023-06-25 07:13:27
速度下可獲得更高的轉(zhuǎn)矩。然而,這給雙極串聯(lián)步進(jìn)電動機帶來了更高的總體電感,并且在更高的速度下,其有效轉(zhuǎn)矩的下降速度要比單極配置的下降速度更快(圖5)。 圖5:單極與雙極串聯(lián)步進(jìn)電機轉(zhuǎn)矩/速度曲線此行
2020-12-17 10:05:28
針尖對麥芒,閉環(huán)步進(jìn)電機對于伺服電機的優(yōu)勢?伺服電機可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。伺服電機轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,并能快速反應(yīng),在自動控制系統(tǒng)中,用作
2015-12-29 15:21:11
針對兩個同軸的步進(jìn)電機的轉(zhuǎn)矩與驅(qū)動功率不足問題,提出一種多步進(jìn)電機同軸聯(lián)接及驅(qū)動的創(chuàng)新設(shè)計方法并得到了成功應(yīng)用。該項技術(shù)已獲中國國家專利。本文給出了MCS-51單片
2009-05-27 16:44:27 5
5 針對單個步進(jìn)電機的轉(zhuǎn)矩與驅(qū)動功率不足問題,提出一種雙步進(jìn)電機同軸聯(lián)接及驅(qū)動的創(chuàng)新設(shè)計方法并得到了成功應(yīng)用。該相關(guān)技術(shù)已獲中國國家專利,本文給出了MCS-51 單片機控
2009-08-27 11:40:5621 針對工業(yè)界電機平穩(wěn)高速運轉(zhuǎn)的需要,設(shè)計了兩相步進(jìn)電機高速細(xì)分驅(qū)動模塊。模塊采用256步進(jìn)細(xì)分實現(xiàn)步進(jìn)電機的平穩(wěn)工作,采用指令周期短的MC56F8323,壓縮步進(jìn)處理指令數(shù),盡
2010-12-08 17:09:4380 摘 要:本文通過合理選擇步進(jìn)電機相繞組細(xì)分電流波形,提出并介紹了基于80C196MC單片機控制的步進(jìn)電機恒轉(zhuǎn)矩斬波恒流細(xì)分驅(qū)動方案、技術(shù)實現(xiàn)及其應(yīng)用。引言步進(jìn)電
2006-03-11 13:47:08628 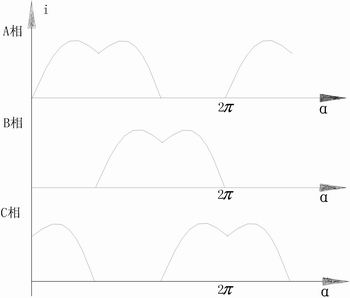
什么是保持轉(zhuǎn)矩(HOLDING TORQUE)?
保持轉(zhuǎn)矩(HOLDING TORQUE)是指步進(jìn)電機通電但沒有轉(zhuǎn)動時,定子鎖住轉(zhuǎn)子的力矩。它是步進(jìn)電機最重
2010-01-09 14:21:049751 
步進(jìn)電機的保持轉(zhuǎn)矩,近似于傳統(tǒng)電機所稱的“功率”。當(dāng)然,有著本質(zhì)的區(qū)別。步進(jìn)電機的物理結(jié)構(gòu),完全不同于交流、直流電機,步進(jìn)電機的輸出功率是可變的。
2010-06-12 08:19:261036 步進(jìn)電機原理,二相八線步進(jìn)電動機接線方法參考圖及接線介紹。
2015-11-09 16:00:1410 根據(jù)步進(jìn)電動機驅(qū)動負(fù)載對加減速響應(yīng)的高速要求,設(shè)計出一種基于單片視的步進(jìn)電機調(diào)速離散控制方法
2016-07-12 15:29:432 根據(jù)步進(jìn)電動機驅(qū)動負(fù)載對加減速響應(yīng)的高速要求,設(shè)計出一種基于單片視的步進(jìn)電機調(diào)速離散控制方法
2016-07-12 15:29:436 五相感應(yīng)電機轉(zhuǎn)矩跟蹤電子變極方法_尹溶森
2017-01-08 11:28:380 先進(jìn)的步進(jìn)電機控制方法
2017-01-23 20:48:1616 永磁同步電機直接轉(zhuǎn)矩控制轉(zhuǎn)矩脈動的產(chǎn)生及其抑制方法綜述
2017-01-21 12:00:292 步進(jìn)電機又稱為脈沖電機,基于最基本的電磁鐵原理,它是一種可以自由回轉(zhuǎn)的電磁鐵,其動作原理是依靠氣隙磁導(dǎo)的變化來產(chǎn)生電磁轉(zhuǎn)矩。其原始模型是起源于年至年間。年前后開始以控制為目的的嘗試,應(yīng)用于氫弧燈的電極輸送機構(gòu)中。
2017-11-21 16:53:4618229 
無刷直流電機伺服系統(tǒng)具有廣泛的應(yīng)用場合,但轉(zhuǎn)矩波動限制了其在高精度場合的應(yīng)用。針對非理想反電動勢引起的無刷直流電機轉(zhuǎn)矩波動提出了一種基于電流反饋的分段式PWM控制方法。該方法通過線反電動勢觀測器獲得
2018-01-14 16:34:050 本文開始介紹了步進(jìn)電機的基本原理,其次介紹了步進(jìn)電機工作效率以及使步進(jìn)電機的效率最大化的方法,最后介紹了步進(jìn)電機選型的步驟與方法。
2018-04-25 14:06:014299 
本應(yīng)用筆記介紹高轉(zhuǎn)矩雙極性步進(jìn)電機的驅(qū)動器解決方案。Microchip的PIC16F1776/9提供了功能豐富的外設(shè),支持使用兩個H橋開關(guān)控制不同驅(qū)動技術(shù),實現(xiàn)高功率和低功率步進(jìn)電機、恒定轉(zhuǎn)矩或高轉(zhuǎn)矩微步、電流限制、電機步進(jìn)速率設(shè)置和電機故障事件檢測。
2018-06-13 08:27:0015 在相同電流且相同轉(zhuǎn)矩輸出的條件下,單極型步進(jìn)電機比雙極型步進(jìn)電機多一倍的線圈,成本更高,控制電路的結(jié)構(gòu)也不一樣,目前市場上流行的大多是雙極型步進(jìn)電機。
2018-07-17 18:34:0336658 
步進(jìn)電機的相數(shù)選擇,這項內(nèi)容,很多客戶幾乎沒有什么重視,大多是隨便購買。其實,不同相數(shù)的電機,工作效果是不同的。相數(shù)越多,步距角就能夠做的比較小,工作時的振動就相對小一些。大多數(shù)場合,使用兩相電機比較多。在高速大力矩的工作環(huán)境,選擇三相步進(jìn)電機是比較實用的。
2019-01-11 10:35:3212873 反應(yīng)式步進(jìn)電動機亦稱磁阻式(VR)步進(jìn)電機。其定轉(zhuǎn)子截路均由軟磁資料側(cè)成,定子上有多相勵滋繞組,運用磁導(dǎo)的交化發(fā)生轉(zhuǎn)矩,是現(xiàn)在運用最多的一種步進(jìn)電機。
2019-07-08 09:01:3210101 
額定電壓(電流)驅(qū)動:參見前文《步進(jìn)電機的靜態(tài)轉(zhuǎn)矩特性及測量方法》一文的下圖,從額定電壓降低電壓來驅(qū)動步進(jìn)電機,發(fā)現(xiàn)位置定位精度變差。
2019-10-07 16:17:002130 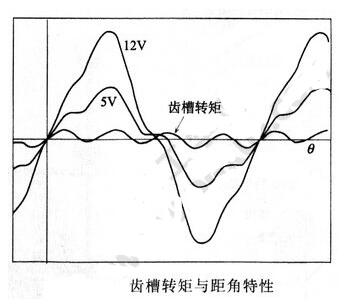
步進(jìn)電機的線圈通直流電時,帶負(fù)載轉(zhuǎn)子的電磁轉(zhuǎn)矩(與負(fù)載轉(zhuǎn)矩平衡而產(chǎn)生的恢復(fù)電磁轉(zhuǎn)矩稱為靜態(tài)轉(zhuǎn)矩或靜止轉(zhuǎn)矩)與轉(zhuǎn)子功率角的關(guān)系稱為角度-靜止轉(zhuǎn)矩特性,這就是電機的靜態(tài)特性。
2019-10-08 15:36:133881 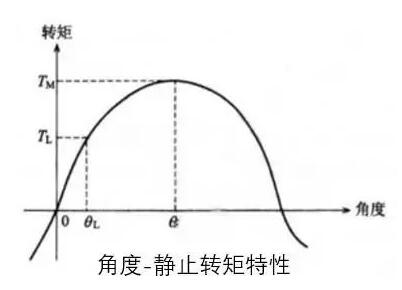
POWERMAX P 和 M 系列步進(jìn)電機為NEMA 23 (60 mm) 步進(jìn)電機設(shè)定標(biāo)準(zhǔn)值。 可提供半疊片、單疊片和雙疊片配置,保持轉(zhuǎn)矩從42至253 oz-in。 M系列電機采用SIGMAX?技術(shù),以獲得更高的轉(zhuǎn)矩和加速度。
2019-10-29 08:00:0011 其中(1)的高次諧波為主要原因。步進(jìn)電機使用方波電流驅(qū)動,必然含有大量的高次諧波,由此產(chǎn)生振動和噪音。因此驅(qū)動電流最好為正弦波。接近正弦波的驅(qū)動方法有步進(jìn)電機的細(xì)分步進(jìn)驅(qū)動。下圖為電機1/4細(xì)分、半步、整步驅(qū)動的振動比較,其振動為依次增加的。
2019-12-10 09:25:348494 步進(jìn)電機的線圈通直流電時,帶負(fù)載轉(zhuǎn)子的電磁轉(zhuǎn)矩(與負(fù)載轉(zhuǎn)矩平衡而產(chǎn)生的恢復(fù)電磁轉(zhuǎn)矩稱為靜態(tài)轉(zhuǎn)矩或靜止轉(zhuǎn)矩)與轉(zhuǎn)子功率角的關(guān)系稱為角度-靜止轉(zhuǎn)矩特性,這就是電機的靜態(tài)特性。
2019-12-11 09:02:0510552 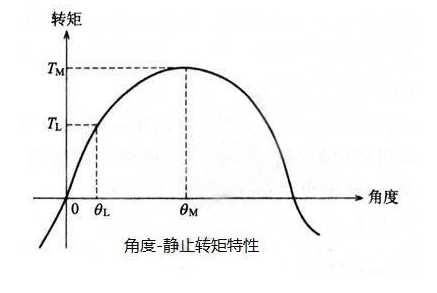
對于電機的轉(zhuǎn)速也要特別考慮。因為,電機的輸出轉(zhuǎn)矩,與轉(zhuǎn)速成反比。就是說,步進(jìn)電機在低速(每分鐘幾百轉(zhuǎn)或更低轉(zhuǎn)速,其輸出轉(zhuǎn)矩較大),在高速旋轉(zhuǎn)狀態(tài)的轉(zhuǎn)矩(1000轉(zhuǎn)/分--9000轉(zhuǎn))就很小了。
2019-12-11 09:30:0425696 多相步進(jìn)電機的優(yōu)點是能高速響應(yīng)。步進(jìn)電機為同步電機,繞組電流頻率與轉(zhuǎn)子速度成正比例,若電機高速運轉(zhuǎn),則繞組電流角頻率ω增加,使繞組電感L產(chǎn)生的電抗ωL加大,從而降低電流,致使轉(zhuǎn)矩下降。
2020-03-10 09:42:281517 步進(jìn)電機閉環(huán)的轉(zhuǎn)矩隨著轉(zhuǎn)速的增加而降低,即具備低轉(zhuǎn)速高扭力的特點,適合的轉(zhuǎn)速為500左右。而伺服電機是恒扭矩,深圳步進(jìn)電機直銷,但更適合2000轉(zhuǎn)或更高。
2020-03-23 11:08:052583 定子的主極數(shù)為6,交鏈磁通大,而且兩相激磁時的轉(zhuǎn)矩合成效率比兩相步進(jìn)電機好,轉(zhuǎn)矩較高。
2020-04-03 09:18:554578 最簡單的方法是在負(fù)載軸上增加一個杠桿,用彈簧秤拉動杠桿,拉力乘以臂的長度就是負(fù)載力矩。也可以根據(jù)負(fù)載特性進(jìn)行理論計算。由于步進(jìn)電機是控制型電機,目前常用的步進(jìn)電機最大轉(zhuǎn)矩不超過45nm。
2020-08-08 09:19:001579 步進(jìn)電機有步距角(觸及到相數(shù))、靜轉(zhuǎn)矩、及電流三大體素構(gòu)成。一旦三大體素斷定,步進(jìn)電機的類型便斷定下來了。
2020-09-25 11:46:374317 “牽入轉(zhuǎn)矩特性”也稱為“啟動轉(zhuǎn)矩特性”,表示可以使停止?fàn)顟B(tài)的步進(jìn)電機啟動的頻率(脈沖頻率)與負(fù)載轉(zhuǎn)矩之間的關(guān)系。牽入轉(zhuǎn)矩曲線內(nèi)的區(qū)域稱為“自啟動區(qū)域”,是可以啟動、停止和反轉(zhuǎn)的區(qū)域。另外,將負(fù)載轉(zhuǎn)矩為零的頻率=可以啟動步進(jìn)電機的極限頻率稱為“最大自啟動頻率”。如圖所示,頻率越高,可啟動的負(fù)載轉(zhuǎn)矩越低。
2021-06-12 16:27:005566 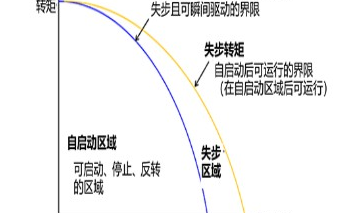
下圖顯示了步進(jìn)電機的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2021-06-13 17:46:324193 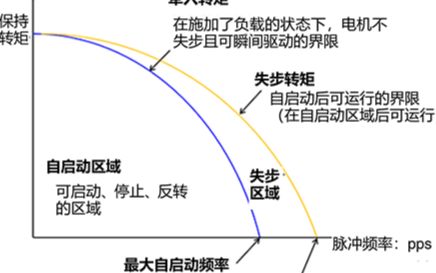
本文將介紹步進(jìn)電機的基本特性。步進(jìn)電機的基本特性:下圖顯示了步進(jìn)電機的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2023-02-24 09:51:101168 
如何使用步進(jìn)電機解決尺寸和重量增加的負(fù)載問題
2023-03-07 16:58:22616 
最簡單的步進(jìn)電機驅(qū)動方法是單相雙極驅(qū)動方式,也稱為雙相步進(jìn)驅(qū)動方式。該方式只需要使用一個 H橋驅(qū)動器和一個脈沖發(fā)生器,即可實現(xiàn)步進(jìn)電機的驅(qū)動控制。
2023-03-08 14:21:5612542 另外,步進(jìn)電機的牽入轉(zhuǎn)矩特性和失步轉(zhuǎn)矩特性會因勵磁方法和驅(qū)動電路而異。因此,對步進(jìn)電機的特性研究中,需要進(jìn)行包括驅(qū)動方法和電路在內(nèi)的整體評估。
2023-03-09 11:52:28454 
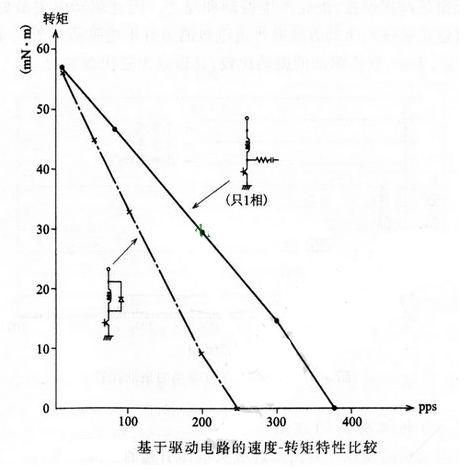
從本文開始,將介紹兩相雙極步進(jìn)電機和兩相單極步進(jìn)電機的驅(qū)動電路,以及兩相雙極步進(jìn)電機和兩相單極步進(jìn)電機的驅(qū)動方法。首先介紹雙極連接和單極連接。
2023-03-10 09:14:05783 
基礎(chǔ)參數(shù)介紹 轉(zhuǎn)矩 相、極 步距角、極性 步進(jìn)方式 四、步進(jìn)電機特性 矩角特性 靜態(tài)特性 靜態(tài)穩(wěn)定區(qū) 多拍的矩角特性族動態(tài)特性 轉(zhuǎn)子的震蕩過程 共振現(xiàn)象 共振的解決方案矩頻特性與起動慣頻特性 該文章主要介
2023-03-21 14:32:299 下面從速度-轉(zhuǎn)矩特性考慮要增加動態(tài)轉(zhuǎn)矩的解決方法。增加轉(zhuǎn)矩時,根據(jù)速度的高低,其解決方法各不相同。而解決方法既有電機方面的,又有驅(qū)動電路方面的。
在低速時轉(zhuǎn)矩隨轉(zhuǎn)子齒數(shù)增加而變大。選擇
2023-03-21 15:03:520 依據(jù)電機在一定驅(qū)動速度的條件下,其所帶的負(fù)載轉(zhuǎn)矩、負(fù)載慣量(轉(zhuǎn)動慣M)和必需的加速轉(zhuǎn)矩,來計算所選擇步進(jìn)電機的輸出轉(zhuǎn)矩。
負(fù)載轉(zhuǎn)矩 T L T_L TL時,欲驅(qū)動其到 f 2 f_2 f2
2023-03-21 10:53:210 步進(jìn)電機基礎(chǔ)(3.2)-步進(jìn)電機的原理與特性之基本特性 前言 基本信息 公式 前言說明 基本特性 1. 靜態(tài)轉(zhuǎn)矩特性 2. 動態(tài)轉(zhuǎn)矩特性 1) 脈沖頻率-轉(zhuǎn)矩特性 2) 脈沖頻率-慣量特性3. 暫態(tài)
2023-03-23 13:51:012 為了評估步進(jìn)電機的特性必須要有必要的測量方法。本章針對步進(jìn)電機的基本特性①靜態(tài)特性:靜態(tài)轉(zhuǎn)矩特性,步進(jìn)角度精度;②動態(tài)特性:速度-轉(zhuǎn)矩特性;③暫態(tài)特件;介紹各種測量方法。并且進(jìn)一步
說明引起步進(jìn)電機產(chǎn)生振動和噪音的原因,以及振動和噪音的測量方法。
2023-03-23 10:00:441 每種型號步進(jìn)電機的規(guī)格里均有最大靜止轉(zhuǎn)矩及電機慣量等參數(shù),各項參數(shù)與負(fù)載轉(zhuǎn)矩及負(fù)載慣量間必定有相關(guān)聯(lián)系存在,選用步進(jìn)電機時應(yīng)考慮負(fù)載機構(gòu)的運動條件要求,如加速度的快慢、機構(gòu)的重量、機構(gòu)的運動方式
2023-09-08 08:08:42388 
高速運行,就能解決速度波動問題,但轉(zhuǎn)矩又會不足。即低速會轉(zhuǎn)矩波動,而高速又會轉(zhuǎn)矩不足,所以需要使用減速器。2.步進(jìn)電機常配減速機有哪些減速機是一種由封閉在剛性殼體內(nèi)
2023-09-25 08:08:49863 步進(jìn)電機控制方法 步進(jìn)電機是一種將電信號轉(zhuǎn)化為機械轉(zhuǎn)動的電動機,其輸出轉(zhuǎn)角是按照電脈沖控制信號的變化而變化的。步進(jìn)電機的控制方法有幾種常見的方式,包括全步進(jìn)控制、半步進(jìn)控制和微步進(jìn)控制。 全步進(jìn)控制
2024-01-22 17:18:18318 步進(jìn)電機正反轉(zhuǎn)的換線方法 步進(jìn)電機是一種常見的電機類型,它具有正反轉(zhuǎn)的能力。換線是指改變步進(jìn)電機的電源連接方式,以改變其運動方向。換線方法有很多種,下面將詳細(xì)介紹其中一種常見的換線方法。 步進(jìn)電機
2024-01-23 14:45:51663
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論