隨著工業(yè)自動(dòng)化程度的不斷提高,伺服控制技術(shù)、電力電子技術(shù)和微電子技術(shù)的快速發(fā)展,伺服運(yùn)動(dòng)與控制技術(shù)也在不斷走向成熟,電機(jī)運(yùn)動(dòng)控制平臺(tái)作為一種高性能的測(cè)試方式已經(jīng)被廣泛應(yīng)用,人們對(duì)伺服性能的要求也在不斷提高
2017-08-13 20:39:29 4787
4787 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾?b class="flag-6" style="color: red">選擇伺服電機(jī)的控制方式呢?
2022-08-17 11:01:346057 使用伺服電機(jī)在機(jī)器人技術(shù)中很常見,以實(shí)現(xiàn)精確控制。在這里,在本教程中,我們將向您展示如何通過(guò)藍(lán)牙連接將伺服電機(jī)與Arduino UNO和Android設(shè)備無(wú)線使用。我們已經(jīng)使用 Arduino 控制了伺服,這次我們使用 Arduino 和藍(lán)牙控制伺服電機(jī)。
2022-11-16 16:19:572601 
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾?b class="flag-6" style="color: red">選擇伺服電機(jī)的控制方式呢?
2023-05-16 15:56:152478 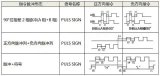
字體進(jìn)入電工電氣學(xué)習(xí)公眾號(hào),右上角“···”選擇設(shè)為星標(biāo),置頂公眾號(hào)】伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾?b class="flag-6" style="color: red">選擇伺服電機(jī)的控制方式呢? 一、伺服電機(jī)脈沖控制方式
2020-09-29 07:57:38
伺服電機(jī)的應(yīng)用領(lǐng)域有哪些?伺服電機(jī)有哪些控制模式?
2021-09-27 06:21:31
伺服電機(jī)有哪幾種制動(dòng)方式?再生制動(dòng)/電磁制動(dòng)/動(dòng)態(tài)制動(dòng)的區(qū)別是什么?選擇伺服電機(jī)配件時(shí)的注意事項(xiàng)有哪些?
2021-10-13 06:04:16
速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。具體采用什么控制方式要根據(jù)客戶的要求,滿足何種運(yùn)動(dòng)功能來(lái)選擇。如果您對(duì)電機(jī)的速度、位置都沒(méi)有要求,只要輸出一個(gè)恒轉(zhuǎn)矩,當(dāng)然是用
2018-10-26 10:51:18
一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。 1、轉(zhuǎn)矩控制:轉(zhuǎn)矩控制方式是通過(guò)外部模擬量的輸入或直接的地址的賦值來(lái)設(shè)定電機(jī)軸對(duì)外的輸出轉(zhuǎn)矩的大小,具體表現(xiàn)為例如10V對(duì)應(yīng)
2021-06-28 09:27:26
一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。大多數(shù)人想知道的就是這三種控制方式具體根據(jù)什么來(lái)選擇的?
2021-01-29 07:28:36
伺服電機(jī)的內(nèi)部結(jié)構(gòu)與基本原理是什么?伺服電機(jī)的分類有哪些?如何選擇品牌?模擬舵機(jī)和數(shù)字舵機(jī)的區(qū)別是什么?
2021-09-29 08:23:27
伺服電機(jī)與步進(jìn)電機(jī)相比有哪些優(yōu)勢(shì)?選擇伺服電機(jī)要考慮哪些因素?
2021-09-29 06:07:32
plc控制伺服電機(jī)的下位機(jī)系統(tǒng)有什么程序?伺服電機(jī)的控制方式包括哪幾種?plc控制伺服電機(jī)的上位機(jī)系統(tǒng)有什么功能?
2021-06-28 07:14:41
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾?b class="flag-6" style="color: red">選擇伺服電機(jī)的控制方式呢?
2021-01-22 07:46:05
精確的速度或位置控制的部件,會(huì)選擇伺服電機(jī)驅(qū)動(dòng)。變頻器+變頻電機(jī)的控制方式,是通過(guò)改變輸入電機(jī)的電源頻率而改變電
2021-06-28 06:28:11
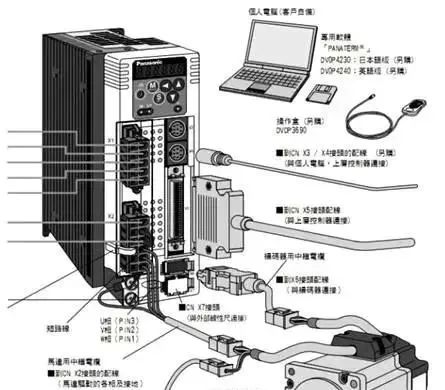
如何使用STM32核心板控制松下伺服電機(jī)?伺服電機(jī)的控制方式有哪些?STM32與伺服驅(qū)動(dòng)器如何連接?
2021-09-26 07:15:40
和通訊方面的要求),主要控制方式是位置、轉(zhuǎn)矩還是速度方式。供電電源是直流還是交流電源,或電池供電,電壓范圍。據(jù)此以確定電機(jī)和配用驅(qū)動(dòng)器或控制器的型號(hào)。 2,選擇步進(jìn)電機(jī)還是伺服電機(jī)系統(tǒng)? 其實(shí),選擇什么樣的
2021-09-17 08:37:16
如何正確選擇伺服電機(jī)和步進(jìn)電機(jī)?選擇步進(jìn)電機(jī)還是伺服電機(jī)系統(tǒng)?如何配用步進(jìn)電機(jī)驅(qū)動(dòng)器?2相和5相步進(jìn)電機(jī)有何區(qū)別,如何選擇?何時(shí)選用直流伺服系統(tǒng),它和交流伺服有何區(qū)別?
2021-11-15 07:46:57
伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2021-01-21 07:38:46
進(jìn)行調(diào)試。下面是調(diào)試伺服電機(jī)的具體步驟: 1、初始化參數(shù)在接線之前,先初始化參數(shù)。在控制卡上:選好控制方式;將PID參數(shù)清零;讓控制卡上電時(shí)默認(rèn)使能信號(hào)關(guān)閉;將此狀態(tài)保存,確保控制卡再次上電時(shí)即為
2015-12-29 11:12:23
三環(huán)控制的原理是什么?影響伺服電機(jī)控制的因素是什么?
2021-09-28 06:18:57
大家好, 剛接觸工業(yè)機(jī)器人,誰(shuí)用過(guò)DirLoader ? 我們有一個(gè)KRC4
控制器,上邊有DirLoader。 我的任務(wù)是設(shè)置它,并讓它工作,迄今為止,這任務(wù)不容易。 KUKA英國(guó)無(wú)法提供幫助,因?yàn)?/div>
2021-06-28 12:41:04
步進(jìn)電機(jī)和伺服電機(jī)有什么區(qū)別1, 怎樣選擇步進(jìn)和伺服電機(jī)? 主要視具體應(yīng)用情況而定,簡(jiǎn)單地說(shuō)要確定:負(fù)載的性質(zhì)(如水平還是垂直負(fù)載等),轉(zhuǎn)矩、慣量、轉(zhuǎn)速、精度、加減速等要求,上位控制要求(如對(duì)端口界面和通訊方面的要求),主要控制方式是位置、轉(zhuǎn)矩還是速度方式。供電電源是
2021-09-01 06:16:30
伺服電機(jī)一般都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式 。 速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。具體采用什么控制方式要根據(jù)客戶的要求,滿足何種運(yùn)動(dòng)
2018-10-26 10:57:29
無(wú)刷電機(jī)主要由哪幾部分組成?無(wú)刷電機(jī)是怎樣進(jìn)行工作的?無(wú)刷伺服電機(jī)的控制方式有哪幾種?
2021-08-09 09:02:06
步進(jìn)電機(jī)和伺服電機(jī)控制的方式有何不同?步進(jìn)電機(jī)和伺服電機(jī)的低頻特性有何不同?
2021-09-28 07:55:48
步進(jìn)電機(jī)和伺服電機(jī)是怎樣接線的?步進(jìn)電機(jī)和伺服電機(jī)有哪幾種接線方式?
2021-09-26 08:00:08
請(qǐng)問(wèn)一下怎樣選擇伺服電機(jī)的控制方式?
2021-10-12 08:42:53
請(qǐng)問(wèn)如何選擇合適機(jī)械的伺服電機(jī)?
2021-09-27 07:57:13
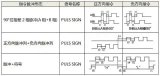
運(yùn)動(dòng)控制器控制伺服電機(jī)的指令方式運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的調(diào)試步驟
2021-01-21 07:15:51
PLC控制伺服電機(jī)應(yīng)用實(shí)例。
介紹PLC如何控制伺服電機(jī)應(yīng)用的實(shí)例。
2016-05-05 11:37:39 62
62 速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。具體采用什么控制方式要根據(jù)客戶的要求,滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2016-11-25 13:44:352481 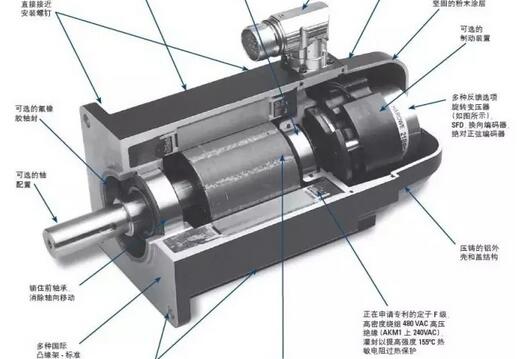
伺服電機(jī)一般都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式 。速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。具體采用什么控制方式要根據(jù)客戶的要求,滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2017-02-10 05:31:112238 什么是伺服電機(jī)?它們是如何起作用的?(基本駕駛方法和技術(shù))如何選擇伺服電機(jī)應(yīng)用Arduino平臺(tái)工作
2017-05-02 15:37:3923 伺服電機(jī)(servo motor )是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服
2017-12-15 15:06:4410899 一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式 。
2018-07-05 09:30:002570 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2018-03-19 14:46:3018761 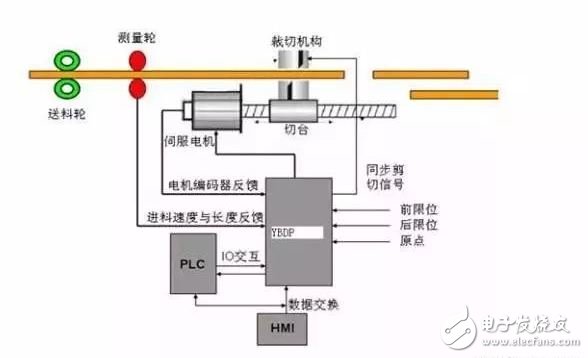
本文開始介紹了伺服電機(jī)的工作原理與優(yōu)點(diǎn),其次介紹了伺服電機(jī)的選型步驟與最簡(jiǎn)單伺服電機(jī)選型計(jì)算方式,最后介紹了伺服電機(jī)選型的注意事項(xiàng)。
2018-04-25 14:36:4741422 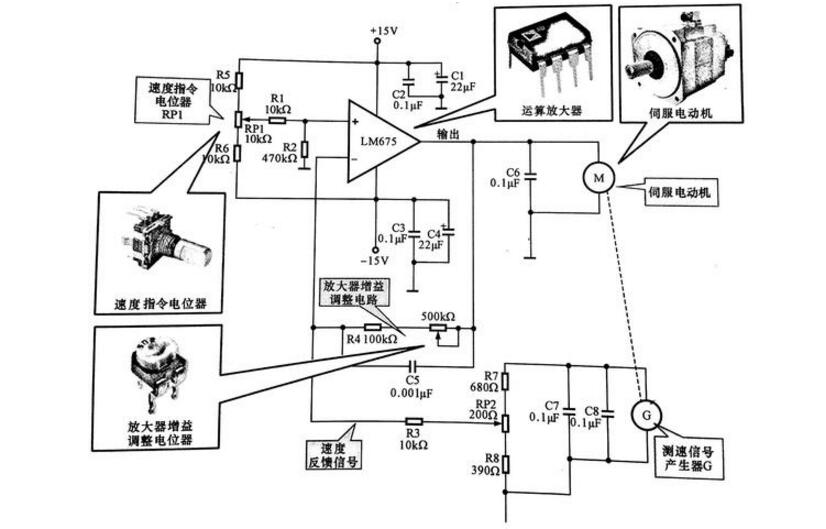
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2018-04-30 17:00:007381 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要
2018-07-24 11:19:483808 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2018-11-13 17:01:444505 日系伺服電機(jī)的控制方式怎么選擇 位置控制方式、轉(zhuǎn)矩控制方式、速度控制方式,日系伺服電機(jī)的這三種控制方式一般我們都清楚。像速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的,位置控制是通過(guò)發(fā)脈沖來(lái)控制
2020-06-28 17:12:04654 日系伺服電機(jī)的控制方式怎么選擇 位置控制方式、轉(zhuǎn)矩控制方式、速度控制方式,日系伺服電機(jī)的這三種控制方式一般我們都清楚。像速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的,位置控制是通過(guò)發(fā)脈沖來(lái)控制
2020-06-12 15:05:13505 速度控制一般都是有變頻器實(shí)現(xiàn),用伺服電機(jī)做速度控制,一般是用于快速加減速或是速度精準(zhǔn)控制的場(chǎng)合,因?yàn)橄鄬?duì)于變頻器,伺服電機(jī)可以在幾毫米內(nèi)達(dá)到幾千轉(zhuǎn),由于伺服都是閉環(huán)的,速度非常穩(wěn)定。
2018-12-26 17:33:357587 伺服電機(jī)一般都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式 。
2018-12-27 10:11:267868 這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號(hào);伺服驅(qū)動(dòng)器工作在位置控制模式,位置閉環(huán)由伺服驅(qū)動(dòng)器完成。日系伺服和國(guó)產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡(jiǎn)單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。
2019-02-17 11:16:2710987 技術(shù)需知伺服電機(jī)調(diào)試的基本步驟, 運(yùn)動(dòng)控制器控制伺服電機(jī)通常采用兩種指令方式: 1、數(shù)字脈沖 這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送脈沖/方向或CW/CCW類型的脈沖指令信號(hào)
2020-06-12 14:45:485452 伺服電機(jī)控制器是數(shù)控系統(tǒng)及其他相關(guān)機(jī)械控制領(lǐng)域的關(guān)鍵器件,一般是通過(guò)位置、速度和力矩三種方式對(duì)伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。
2019-07-26 14:35:4314365 伺服驅(qū)動(dòng)器通過(guò)接收的脈沖頻率和數(shù)量來(lái)控制伺服電機(jī)運(yùn)行的距離和速度。比如,我們約定伺服電機(jī)每10000個(gè)脈沖轉(zhuǎn)一圈。如果PLC在一分鐘內(nèi)發(fā)送10000個(gè)脈沖,那么伺服電機(jī)就以1r/min的速度走完一圈,如果在一秒鐘內(nèi)發(fā)送10000個(gè)脈沖,那么伺服電機(jī)就以60r/min的速度走完一圈。
2019-12-09 08:51:4617113 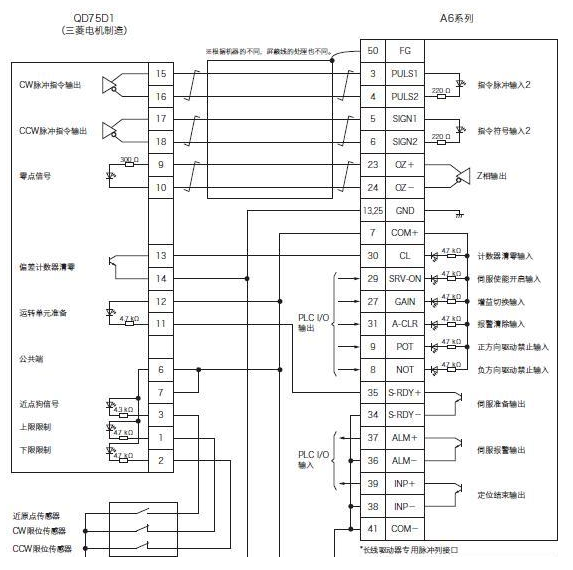
本文主要闡述了直流伺服電機(jī)機(jī)械特性及它的控制方式。
2020-01-09 14:13:1415276 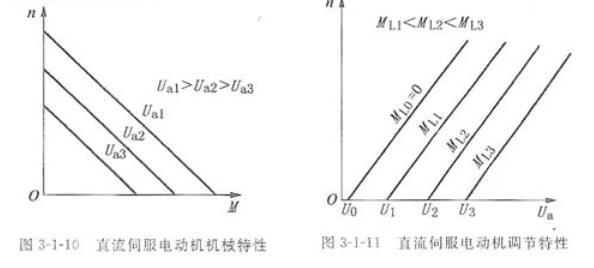
的轉(zhuǎn)速隨控制電壓的大小而變化,當(dāng)控制電壓的相位相反時(shí),伺服電動(dòng)機(jī)將反轉(zhuǎn)。因此,交流伺服電機(jī)使用的過(guò)程中,做好控制工作很重要。那么交流伺服電機(jī)有哪三種控制方式呢?
2020-01-09 14:42:0725462 伺服的結(jié)構(gòu)是怎樣的?一個(gè)最簡(jiǎn)易的伺服控制單元,就是一個(gè)伺服電機(jī)加伺服控制器,今天就來(lái)解析下伺服電機(jī)與伺服控制器。
2020-09-24 10:54:3412382 
一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。大多數(shù)人想知道的就是這三種控制方式具體根據(jù)什么來(lái)選擇的?
2020-12-14 23:12:304529 步進(jìn)電機(jī)開環(huán)控制的方式簡(jiǎn)單、易于實(shí)現(xiàn)、價(jià)格較低;伺服系統(tǒng)是以變頻技術(shù)為基礎(chǔ)發(fā)展起來(lái)的產(chǎn)品,是一種以機(jī)械位置或角度作為控制對(duì)象的自動(dòng)控制系統(tǒng)。
2020-12-26 08:30:55654 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾?b class="flag-6" style="color: red">選擇伺服電機(jī)的控制方式呢?
2021-01-20 10:34:5220 一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。大多數(shù)人想知道的就是這三種控制方式具體根據(jù)什么來(lái)選擇的?
2021-01-22 06:30:447 伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2021-02-03 06:46:1237 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2021-04-04 06:08:5826 什么是伺服電機(jī)?伺服電機(jī)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),分為直流伺服電機(jī)和交流伺服電動(dòng)機(jī)兩大類。
2022-01-14 17:30:2816209 無(wú)論是步進(jìn)電機(jī),還是伺服電機(jī),它們都為現(xiàn)代化的工業(yè)生產(chǎn)立下了不朽的功勞。但正所謂文無(wú)第一,武無(wú)第二,強(qiáng)強(qiáng)相遇,還是要分個(gè)高下的。下面,我們就從這幾個(gè)維度對(duì)比下步進(jìn)電機(jī)以及伺服電機(jī),看看我們?cè)趯?shí)際工作中選擇哪個(gè)更為合適。
2022-04-27 13:31:005537 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2022-12-30 15:47:22739 伺服電機(jī)是一種可以通過(guò)控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動(dòng)電流,從而控制電機(jī)的位置和運(yùn)動(dòng)。因此在很多需要高精度運(yùn)動(dòng)控制的領(lǐng)域得到了廣泛應(yīng)用。
2023-03-03 11:17:278928 伺服電機(jī)的運(yùn)動(dòng)精度和穩(wěn)定性。需要注意的是,在使用伺服電機(jī)時(shí),應(yīng)根據(jù)實(shí)際情況選擇合適的使能信號(hào)設(shè)置方式,并確保使能信號(hào)的正確連接和設(shè)置,以保證伺服電機(jī)的正常工作和安全運(yùn)行。
2023-03-03 11:20:4011209 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2023-03-07 10:19:53601 伺服電機(jī)通常由以下幾個(gè)主要部分組成:
電機(jī)部分:伺服電機(jī)的電機(jī)部分一般由轉(zhuǎn)子、定子、繞組、磁極等部件組成。電機(jī)的類型包括直流伺服電機(jī)、交流伺服電機(jī)、步進(jìn)伺服電機(jī)等,每種類型的電機(jī)在結(jié)構(gòu)和控制方式上都有所不同。
2023-03-07 15:14:586213 直流伺服電機(jī)的控制方式有多種,下面介紹幾種常見的方式:
位置控制:這種控制方式主要是根據(jù)電機(jī)的角度或位置進(jìn)行反饋控制,通過(guò)控制電機(jī)的轉(zhuǎn)速和方向來(lái)實(shí)現(xiàn)位置控制,應(yīng)用于需要精確位置控制的場(chǎng)合
2023-03-10 13:49:544580 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2023-03-17 09:47:13448 電壓方式:只需要在控制信號(hào)端加入一定大小的電壓即可,在有些場(chǎng)景甚至使用一個(gè)電位器即可實(shí)現(xiàn)控制,非常的簡(jiǎn)單。但選用電壓作為控制信號(hào),在環(huán)境復(fù)雜的場(chǎng)景下,電壓容易被干擾,造成控制不穩(wěn)定。
2023-04-26 10:48:001618 在回答這個(gè)問(wèn)題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來(lái)說(shuō),伺服電機(jī)主要用于精確定位,因此大家通常所說(shuō)的伺服控制,其實(shí)就是對(duì)伺服電機(jī)的位置控制。 其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過(guò)應(yīng)用比較少而已。
2023-04-27 17:34:351116 
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。
2023-05-24 09:44:00636 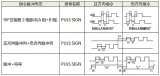
伺服電機(jī)是一種可以精確控制角度方向的電子設(shè)備。當(dāng)涉及到以精確角度移動(dòng)或旋轉(zhuǎn)物體時(shí),伺服電機(jī)是此類應(yīng)用的最佳選擇。它由一個(gè)簡(jiǎn)單的直流電機(jī)和位置反饋系統(tǒng)組成,用于確定電機(jī)位置。我們將使用可以360o旋轉(zhuǎn)
2023-06-18 09:58:21407 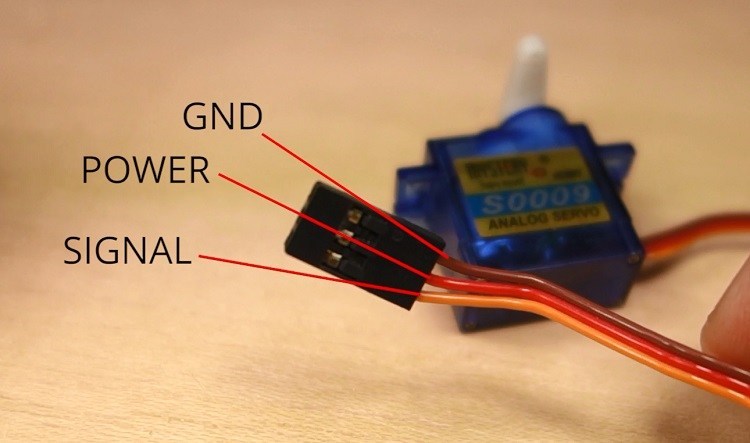
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾?b class="flag-6" style="color: red">選擇伺服電機(jī)的控制方式呢?一、伺服電機(jī)脈沖控制方式在一些小型單機(jī)設(shè)備,選用脈沖控制實(shí)現(xiàn)電機(jī)的定位,應(yīng)該是常見的應(yīng)用方式,這種
2022-03-14 14:33:482401 
系統(tǒng)中。為了適應(yīng)數(shù)字控制的發(fā)展趨勢(shì),運(yùn)動(dòng)控制系統(tǒng)中大多采用步進(jìn)電機(jī)或全數(shù)字式交流伺服電機(jī)作為執(zhí)行電動(dòng)機(jī)。雖然兩者在控制方式上相似(脈沖串和方向信號(hào)),但在使用性能和應(yīng)用場(chǎng)合
2023-01-11 17:58:34667 使用者在選擇伺服電機(jī)時(shí)通常關(guān)心以下幾個(gè)方面: 首先就是伺服電機(jī)的性能參數(shù),包括額定功率、額定轉(zhuǎn)矩、最大轉(zhuǎn)速、控制精度等內(nèi)容。這些參數(shù)直接影響到伺服電機(jī)在具體應(yīng)用中的性能表現(xiàn)和能力。 其次是伺服電機(jī)
2023-07-07 08:10:03197 伺服電機(jī)是一種用于精確控制運(yùn)動(dòng)的電機(jī),它在許多自動(dòng)化應(yīng)用中發(fā)揮著關(guān)鍵作用。選擇合適的伺服電機(jī)需要考慮多個(gè)因素,包括但不限于以下幾點(diǎn)。
2023-07-12 10:20:22466 伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2023-07-26 09:22:20980 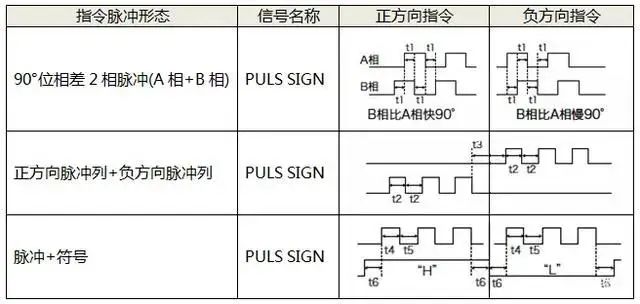
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2023-07-28 14:36:19574 
(1)過(guò)載運(yùn)行:將伺服電機(jī)用于超出其額定負(fù)載能力的應(yīng)用,導(dǎo)致電機(jī)過(guò)熱、損壞或提供不穩(wěn)定的輸出。伺服電機(jī)應(yīng)根據(jù)制造商提供的額定負(fù)載參數(shù)選擇合適的型號(hào),并確保在正常工作范圍內(nèi)運(yùn)行。 (2)不正確的電源
2023-08-01 08:10:02250 在回答這個(gè)問(wèn)題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來(lái)說(shuō),伺服電機(jī)主要用于精確定位,因此大家通常所說(shuō)的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過(guò)應(yīng)用比較少而已。
2023-08-09 09:25:28602 在回答這個(gè)問(wèn)題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來(lái)說(shuō),伺服電機(jī)主要用于精確定位,因此大家通常所說(shuō)的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過(guò)應(yīng)用比較少而已。
2023-09-08 11:22:48737 一般伺服電機(jī)是可以支持多種回零方式的,例如電機(jī)使用的是增量編碼器,那么可以選擇通過(guò)C脈沖的回零方式;如果電機(jī)使用的是串行編碼器或旋轉(zhuǎn)變壓器,那么就不能選擇通過(guò)C脈沖的回零方式。
2023-10-23 11:44:56789 
電子發(fā)燒友網(wǎng)站提供《如何正確選擇伺服電機(jī)和步進(jìn)電機(jī).doc》資料免費(fèi)下載
2023-10-27 11:03:530 伺服電機(jī)的三種控制方式 如何確定選擇伺服電機(jī)控制方式? 伺服電機(jī)是一種能夠根據(jù)輸入信號(hào)實(shí)時(shí)調(diào)整轉(zhuǎn)速和位置的電動(dòng)機(jī)。它通常用于需要高精度、高效率、高可靠性的工業(yè)領(lǐng)域,如機(jī)床、機(jī)器人、印刷設(shè)備等。伺服
2023-12-26 14:02:19582 伺服脈沖控制方式通過(guò)高速脈沖信號(hào)對(duì)伺服電機(jī)進(jìn)行精確控制,能夠?qū)崿F(xiàn)高精度的定位和速度調(diào)節(jié),提高生產(chǎn)效率和產(chǎn)品質(zhì)量。
2024-01-22 09:34:53165 交流伺服電機(jī)是一種通過(guò)閉環(huán)反饋控制系統(tǒng)實(shí)現(xiàn)精確位置、速度和轉(zhuǎn)矩控制的電機(jī)。它在工業(yè)自動(dòng)化、機(jī)械加工、機(jī)器人領(lǐng)域有著廣泛的應(yīng)用。本文將詳細(xì)介紹交流伺服電機(jī)的工作原理和控制方式。 一、交流伺服電機(jī)
2024-02-18 14:59:25276 特性,可把所收到的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。按控制方式可分為:脈沖型和總線型。 一、伺服電機(jī)脈沖方式 伺服電機(jī)脈沖方式是通過(guò)控制器向驅(qū)動(dòng)器發(fā)送脈沖信號(hào)控制電機(jī)運(yùn)動(dòng),由于每一次脈沖的頻率和寬度
2024-02-25 11:53:15534  電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論