 電子發燒友App
電子發燒友App


伺服電機的工作原理
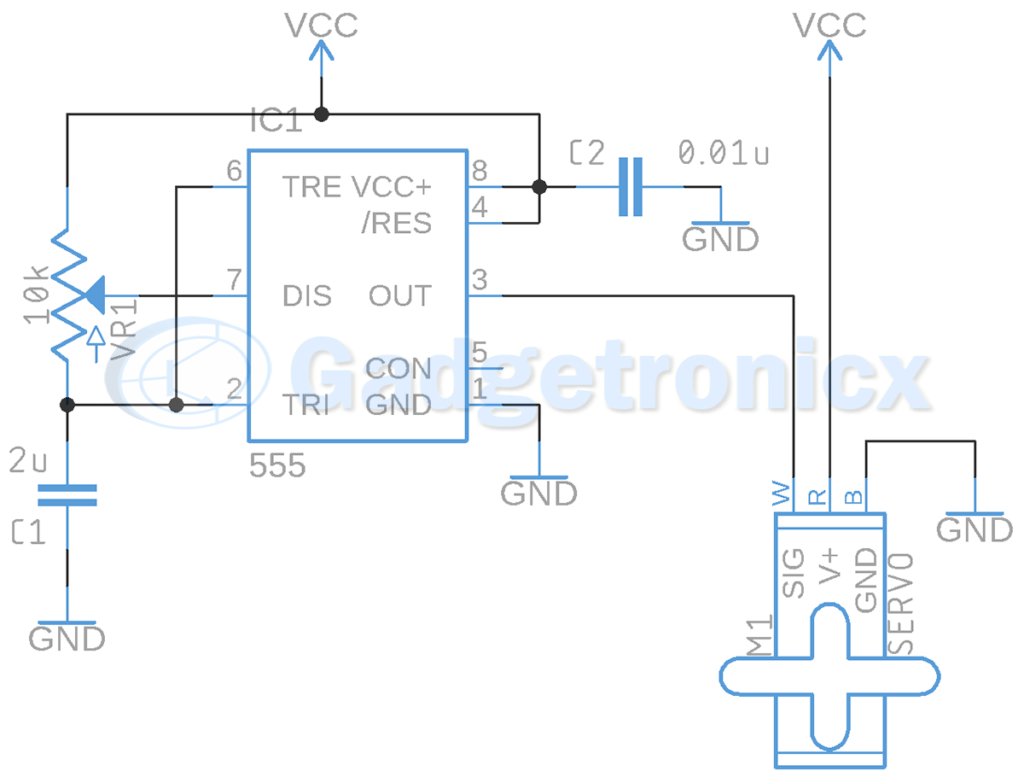
下圖所示是一種采用功率運算放大器LM675制成的伺服電動機控制電路,電動機采用直流伺服電動機。從圖可見,功率運算放大器LM675由15V供電,15V電壓經RP1加到運算放大器LM675的同相輸入端,LM675的輸出電壓加到伺服電動機的輸入端。電動機上裝有測速信號產生器,用于實時檢測電動機的轉速。實際上測速信號產生器是一種發電機,它輸出的電壓與轉速成正比。測速信號產生器G輸出的電壓經分壓電路后作為速度誤差信號反饋到運算放大器的反相輸入端。速度指令電位器RP1設定的電壓值經R1.R2分壓后加到運算放大器的同相輸入端,相當于基準電壓。
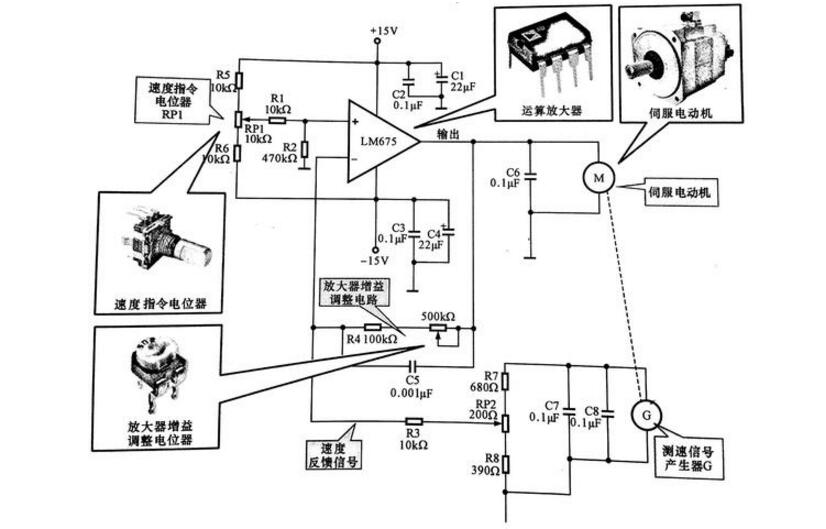
伺服電動機的控制原理圖
伺服電動機用字母M表示伺服電動機,是驅動系統的動力之源。運算放大器:用電路名稱表示,即LM675,是伺服控制電路中的放大器件,為伺服電動機提供驅動電流。
速度指令電位器RP1:在電路中設定運算放大器的基準電壓,即速度設定。放大器增益調整電位器RP2:在電路中分別用于微調放大器的增益和速度反饋信號的大小。當電動機的負載發生變動時,反饋到運算放大器反相輸入端的電壓也會發生變化,即電
動機負載加重時,速度會降低,測速信號產生器的輸出電壓也會降低,使運算放大器反相輸入端的電壓降低,該電壓與基準電壓之差增加,運算放大器的輸出電壓增加。反之,當負載變小、電動機速度增加時,測速信號產生器的輸出電壓上升,加到運算放大器反相輸入端的反饋電壓增加,該電壓與基準電壓之差減小,運算放大器的輸出電壓下降,會使電動機的速度隨之下降,從而使轉速能自動穩定在設定值。
伺服電機優點
1、精度:實現了位置,速度和力矩的閉環控制;克服了步進電機失步的問題;
2、轉速:高速性能好,一般額定轉速能達到2000~3000轉;
3、適應性:抗過載能力強,能承受三倍于額定轉矩的負載,對有瞬間負載波動和要求快速起動的場合特別適用;
4、穩定:低速運行平穩,低速運行時不會產生類似于步進電機的步進運行現象。適用于有高速響應要求的場合;
5、及時性:電機加減速的動態相應時間短,一般在幾十毫秒之內;
6、舒適性:發熱和噪音明顯降低。
伺服電機的選型步驟
每種型號伺服電機的規格項內均有額定轉矩、最大轉矩及伺服電機慣量等參數各參數與負載轉矩及負載慣量間必定有相關聯系存在,選用伺服電機的輸出轉矩應符合負載機構的運動條件要求,如加速度的快慢、機構的重量;機構的運動方式(水平、垂直旋轉)等;運動條件與伺服電機輸出功率無直接關系,但是一般伺服電機輸出功率越高,相對輸出轉矩也會越高。
因此不但機構重量會影響伺服電機的選用,運動條件也會改變伺服電機的選用。慣量越大時,需要越大的加速及減速轉矩,加速及減速時間越短時,也需要越大的伺服電機輸出轉矩。選用伺服電機規格時,依下列步驟進行。
(1)明確負載機構的運動條件要求,即加/減速的快慢、運動速度、機構的重量、機構的運動方式等。
(2)依據運行條件要求選用合適的負載慣量計算公式計算出機構的負載慣量。
(3)依據負載慣量與伺服電機慣量選出適當的假選定伺服電機規格。
(4)結合初選的伺服電機慣量與負載慣量,計算出加速轉矩及減速轉矩。
(5)依據負載重量、配置方式、摩擦系數、運行效效率計算出負載轉矩。
(6)初選伺服電機的最大輸出轉矩必須大于加速轉矩+負載轉矩;如不符合條件,必須選用其他型號計算驗證直至符符合要求。
(7)依據負載轉矩、加速轉矩、減速轉矩及保持轉矩計算出連續瞬時轉矩。
(8)初選伺服電機的額定轉矩必須大于連續瞬時轉矩,如,如果不符合條件,必須選用其他型號計算驗證直至符合要求。
(9)完成選定。
最簡單伺服電機選型計算方式
伺服電機選擇的時候,首先一個要考慮的就是功率的選擇。一般應注意以下兩點:
1、如果電機功率選得過小。就會出現“小馬拉大車”現象,造成電機長期過載,使其絕緣因發熱而損壞,甚至電機被燒毀。
2、如果電機功率選得過大。就會出現“大馬拉小車“現象,其輸出機械功率不能得到充分利用,功率因數和效率都不高,不但對用戶和電網不利。而且還會造成電能浪費。
也就是說,電機功率既不能太大,也不能太小,要正確選擇電機的功率,必須經過以下計算或比較:
P=:F*V/100
(其中P是計算功率,單位是KW,F是所需拉力,單位是N,V是工作機線速度m/s)
此外。最常用的是采用類比法來選擇電機的功率。所謂類比法,就是與類似生產機械所用電機的功率進行對比。
具體做法是:了解本單位或附近其他單位的類似生產機械使用多大功率的電機,然后選用相近功率的電機進行試車。試車的目的是驗證所選電機與生產機械是否匹配。
驗證的方法是:使電機帶動生產機械運轉,用鉗形電流表測量電機的工作電流,將測得的電流與該電機銘牌上標出的額定電流進行對比。
如果電功機的實際工作電流與銘脾上標出的額定電流上下相差不大,則表明所選電機的功率合適。
如果電機的實際工作電流比銘牌上標出的額定電流低70%左右。則表明電機的功率選得過大,應調換功率較小的電機。
如果測得的電機工作電流比銘牌上標出的額定電流大40%以上。則表明電機的功率選得過小,應調換功率較大的電機。
實際上應該是考慮扭矩(轉矩),電機功率和轉矩計算公式。
即T=9550P/n
式中:
P一功率,kW;n一電機的額定轉速,r/min;T一轉矩,Nm。
電機的輸出轉矩一定要大于工作機械所需要的轉矩,一般需要一個安全系數。
機械功率公式:P=T*N/97500
P:功率單位W;T:轉矩,單位克/cm;N:轉速,單位r/min。
伺服電機選型的注意事項
1、有些系統如傳送裝置,升降裝置等要求伺服電機能盡快停車,而在故障、急停、電源斷電時伺服器沒有再生制動,無法對電機減速。同時系統的機械慣量又較大,這時對動態制動器的要依據負載的輕重、電機的工作速度等進行選擇。
2、有些系統要維持機械裝置的靜止位置,需電機提供較大的輸出轉矩,且停止的時間較長。如果使用伺服的自鎖功能,往往會造成電機過熱或放大器過載,這種情況就要選擇帶電磁制動的電機。
3、有的伺服驅動器有內置的再生制動單元,但當再生制動較頻繁時,可能引起直流母線電壓過高,這時需另配再生制動電阻。再生制動電阻是否需要另配,配多大,可參照相應樣本的使用說明來配。
4、如果選擇了帶電磁制動器的伺服電機,電機的轉動慣量會增大,計算轉矩時要進行考慮。











 工商網監
工商網監
評論