 電子發燒友App
電子發燒友App


PDIUSBD12 USB 驅動程序演示實驗
一.實驗目的
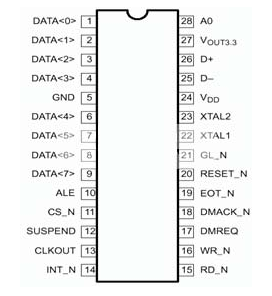
PDIUSBD12(簡稱D12) USB 芯片符合USB1.1 協議,廣泛應用于各種的USB 設備。
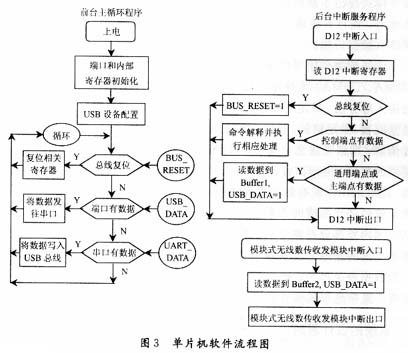
本實驗程序展示了如何在Small RTOS51 操作系統中實現D12 驅動程序的編寫。
示例主要實現了如下功能:USB 設備的枚舉,通過D12 的端點2 接受來自上位機的數
據,并通過單片機的串口轉發回上位機,同時驅動ZLG7290 顯示0~9 的數字。
二.實驗設備及器件
PC 機 一臺
DP-51PROC 單片機綜合仿真實驗儀 一臺
USB D12 PARK 模塊 一臺
USB 連接線 一根
三.實驗步驟
1. D12 PARK 插到A6 區的排針內;
2. 使用導線把A2 區的INT1 與A6 區的P1_INT0 相連;
3. 使用導線把A2 區的T0 與A6 區的P1_IO2 相連;
4. 使用導線把A2 區的T1 與A6 區的P1_IO5 相連;
5. 使用導線把A2 區的A15 與A6 區的P1_CS 1 相連;
6. 使用導線把A2 區的P16、P17 分別與D5 區的SCL、SDA 相連;
7. 使用導線把A2 區的P10 與D5 區的/RST 相連,并短接D5 區的JP1;
8. 使用導線連接A2 區的P14 與B10 區的ZDJ_A;
9. B10 區的ZDJ_B 連接到C1 的GND;
10. 短接B10 區JP18 的電機電源跳線
四.實驗參考程序主要部分
/**************************************************************
Small RTOS(51)
The Real-Time Kernel(For Keil c51)
(c) Copyright 2002-2004, chenmingji
All Rights Reserved
V1.20
***************************************************************/
#include "config.h"
/**************************************************************
聲明全局變量
**********************************************************/
extern EPPFLAGS bEPPflags; /*USB 事件標志*/
extern uint8 xdata GenEpBuf[]; /*信號包緩沖區(命令區)*/
extern uint8 xdata EpBuf[]; /*信號包緩沖區(數據區)*/
extern uint16 data D12_DATA; /*D12 數據的地址變量*/
extern uint16 data D12_COMMAND; /*D12 命令的地址變量*/
//指針的NULL 為0,這個變量占用0 地質避免出現有效的NULL 指針
uint8 OS_Q_MEM_SEL NotUse _at_ 0x0000;
uint8 xdata ShowCase[8];
uint8 xdata PWMH; //高電平脈沖的個數
uint8 xdata PWM; //PWM 周期
uint8 xdata COUNTER;
uint8 key_buf[2];
void enumerate_task(void);
void USB_REC_task(void);
void change_speed_task(void);
void get_key_task(void);
void INTT1() interrupt 3
{
COUNTER++;
if(COUNTER < PWMH)
{
P1_4 = 1; //P1.4 變為高電平
}
else
{
P1_4 = 0;
}
}
void usb_ISR(void) interrupt 2
{
OS_INT_ENTER();
EX1 = 0;
OSSemIntPost(D12_isr);
OSIntExit();
}
/**********************************************************
**名稱:init_port()
**功能:端口初始化,D12SUSPD 復位為0
****************************************************************/
void init_Hard()
{
P0 = 0XFF;
P1 = 0XFF;
P2 = 0XFF;
P3 = 0XFF;
D12SUSPD = 0;
}
/**************************************************************
** 函數名稱: init
** 功能描述: 初始化函數,一般在多任務環境啟動前調用
**************************************************888**************/
void init(void)
{
TMOD &= 0XF0;
TMOD |= 0X01;
// 每10ms 發生一次T0 中斷
TL0 = (65536 - (11059200 / 12) / 100) % 256;
TH0 = (65536 - (11059200 / 12) / 100) / 256;
ET0 = 1;
TR0 = 1;
PT0 = 0;
EA = 1;
}
void control_init(void)
{
PWMH=0x00;
COUNTER=0x01;
PWM=255;
TMOD = TMOD & 0x0f;
TMOD = TMOD | 0x20; //定時器1 在模式2 下工作
TL1=0x00;
TH1=0x00; //自動重裝的值
TR1=1;
ET1 = 1;
}
/**************************************************************
** 函數名稱: void init_display(void)
** 功能描述: 初始化LED 顯示
*****************************************************************/
void init_display(void)
{
uint8 i;
ZLG7290_RST = 0;
_nop_();
_nop_();
ZLG7290_RST = 1;
for (i = 0; i < 8; i++)
{
ShowCase[i] = 31;
}
ZLG7290_SendBuf(ShowCase,8);
}
void main(void)
{
OSInit();
init_Hard(); /*初始化硬件*/
init();
control_init();
IT1 = 0;
EX1 = 1;
PX1 = 1;
init_display();
D12_DATA = 0x7002; /*定義數據地址*/
D12_COMMAND = 0x7003; /*定義命令地址*/
D12_SetDMA(0x0); /*不使用DMA 功能*/
bEPPflags.value = 0; /*初始化USB 寄存器*/
OSTaskCreate(USB_REC_task , NULL , 0); //創建USB 中斷處理任務
while(1)
{
PCON = PCON |0x01 ; /* CPU 進入休眠狀態 */
}
}
/*************************************************************
** 函數名稱: void enumerate(void)
** 功能描述: 完成USB 請求處理的任務
************************************************************/
void enumerate_task(void)
{
//創建其他優先級低的任務
OSTaskCreate(get_key_task, NULL,2);
OSTaskCreate(change_speed_task, NULL,3);
while(1)
{
OSWait(K_TMO, 2);
IT1 = 0;
EX1 = 1;
reconnect_USB();
while(USB_VIN)
{
usbserve();
OSWait(K_TMO, 1);
}
}
}
/*******************************************************
** 函數名稱: void USB_REC(void)
** 功能描述: USB 中斷處理任務
**************************************************************/
void USB_REC_task(void)
{
OSSemCreate(D12_isr , 0);
OSSemCreate(D12_use , 1);
OSTaskCreate(enumerate_task , NULL ,1); //創建USB 請求處理任務
while(1)
{
OSSemPend(D12_isr , 0);
OSSemPend(D12_use , 0);
fn_usb_isr();
OSSemPost(D12_use);
EX1=1;
}
}
/*************************************************************
** 函數名稱: void change_speed_task(void)
** 功能描述: 修改馬達速度任務。
*************************************************************/
void change_speed_task(void)
{
while(1)
{
OS_ENTER_CRITICAL();
if( bEPPflags.bits.ep1_rxdone)
{
PWMH = GenEpBuf[0];
bEPPflags.bits.ep1_rxdone = 0;
}
OS_EXIT_CRITICAL();
ShowCase[0] = PWMH %10;
ShowCase[1] = (PWMH /10)%10;
ShowCase[2] = (PWMH /100)%10;
OS_ENTER_CRITICAL();
ZLG7290_SendBuf(ShowCase,8);
OS_EXIT_CRITICAL();
OSWait(K_TMO,9);
}
}
/***********************************************************
** 函數名稱: void get_key_task(void)
** 功能描述: 獲取按鍵值任務。
**************************************************************/
void get_key_task(void)
{
while(1)
{
OS_ENTER_CRITICAL();
key_buf[0] = ZLG7290_GetKey();
OS_EXIT_CRITICAL();
OSWait(K_TMO, 1);
if(key_buf[0] == 0)
{
continue;
}
OS_ENTER_CRITICAL();
key_buf[1] = ZLG7290_GetKey();
OS_EXIT_CRITICAL();
if(key_buf[0] != key_buf[1])
{
OS_ENTER_CRITICAL();
D12_WriteEndpoint(3, 1, &key_buf[0]);
OS_EXIT_CRITICAL();
}
}
}
五.實驗示例程序簡析
本由于驅動程序中使用了USB51s.lib 庫,故關于該庫的使用方法詳見實驗儀配套光盤
中的《 PDIUSBD12 固件編程指南 》和書《 PDIUSBD12 固件編程與驅動開發 》。這里僅
僅就敘述如何在Small RTOS51 下編寫D12 USB 驅動程序。
由于對PDIUSBD12 的操作是一種不能重入的操作,所以必須要在這一次操作完成后才
能進行下一次對PDIUSBD12 的操作。因此,對PDIUSBD12 器件的操作采用了一個信號量
(D12_use)來管理。這種信號量管理的方法就像有很多個門共用一把鑰匙,必須一次只能
開一個門,而開這個門的先后則由任務的優先級來決定。
在驅動中使用了2 個信號量,其含義如下:
?? D12_use: 不為0,表示PDIUSBD12 處于空閑狀態,可以使用;為0,則表示
PDIUSBD12 正在使用中。不允許其他任務對PDIUSBD12 進行操作。此信號量在
創建時被初始化為1。
?? D12_isr: 不為0,表示檢測到PDIUSBD12 產生的USB 中斷請求;為0,表示
沒有USB 中斷請求或者USB 中斷請求已被執行處理。,此信號量在創建時被初始
化為0。
控制馬達轉速的方法很多,PWM(脈寬調制)方式是比較常見的一種,實現較簡單并
且效果好。在DP-51PRO.NET 中可以實現PWM 控制馬達轉速實驗,其馬達控制電路參見
綜合實驗7 電機實驗.。
本例程中,PWM 波形由定時器1 的周期性中斷產生。其代碼實現見程序清單5.4。定
時器1 中斷服務函數(INTT1)對全局變量COUNTER 進行自增計數,并與PWMH 進行比
較,根據比較結果控制P1_4(波形輸出引腳)輸出電平的高低,從實現PWM 的輸出。馬達的
轉速與PWM 波形中的高電平之占空比成正比。
六.程序演示
由于本示例程序需要跟PC 機進行數據通訊,故必須與PC 機相關軟件配合使用才能實
現所有的功能。上位機軟件可以使用配套光盤中的usb 調試助手(1.2 版)(有關usb 調試助
手的使用請見其幫助文件),該軟件用于向實驗儀發送控制數據和接收發上來的按鍵值數據。
使用usb 調試助手軟件之前還必須安裝D12 驅動程序方可正常使用。
首先將USB_D12.hex 文件下載到實驗儀中,運行單片機中的程序。單片機將配置
PDIUSBD12 并進行USB 枚舉,USB D12PARK 模塊上的LED 燈將閃爍幾次。、兩、三秒后,
若USB 枚舉成功,模塊上的LED 將常亮,表示USB 連接正常。此時打開usb 調試助手,
選擇名稱為Philips PDIUSBD12 Smart Evaluation Board 的設備,設置接收端點和發送端點都
為端點1,設置接收和發送管道大小為16 字節。按下啟動按扭,這樣便與實驗儀建立的USB
連接。向發送區填入1 個字節的數據,然后發送到實驗儀,這樣便可實現馬達的變速。按下
實驗儀中D7 區的按鍵,在PC 上便可接收到該按鍵的鍵值。










 工商網監
工商網監
評論