 電子發燒友App
電子發燒友App


一、?實驗目的:
1、?掌握PID各校正環節的作用
2、?確定給定的系統PID的初始參數
3、?通過實驗了解PID參數的變化對系統的影響
二、?實驗原理
(一)PID調節器的輸入輸出關系:
?
式中:
?為調節器的輸出;?? 為誤差輸入; 為比例增益;
?為積分時間; 為微分時間
(二)PID各校正環節的作用
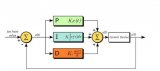
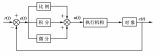
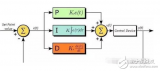
在模擬系統中,調節器最常用的調節規律是PID調節。常規PID調節系統一般由PID調節器和被控對象組成,其原理圖如下:

PID調節是線性控制,將偏差的比例(P)、積分(I)、微分(D)通過線性組合構成調節量,對被控對象進行控制。
PID調節器各校正環節的作用如下:
1、?比例環節: 及時成比例地反映調節系統的偏差信號,偏差一產生,調節器立即產生調節作用,以減少偏差。
2、?積分環節:主要是為了消除系統的余差,提高系統的無差度。積分作用的強弱取決于積分時間常數,越大,積分作用越弱,反之則越強。
3、?微分環節:能反映偏差信號的變化趨勢,并能在偏差信號變得太大之前,引入一個有效的早期修正信號,從而加快系統的動作速度,減小調節時間。
(三)PID參數的變化對系統的影響
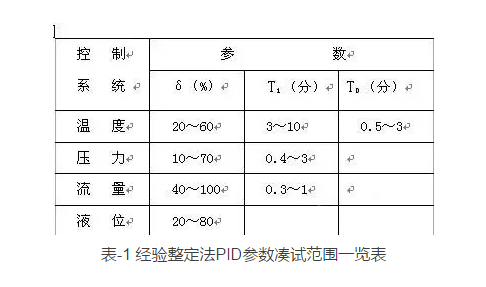
???? 一般情況下,PID調節器本著穩、準、快的控制原則須對三個參數進行初始設定,同時考慮對象特性的多樣性,控制指標的不同進行整定、優化才能取得滿意效果。
在PID調節參數中,比例系數KP增大,會使調節閥的動作靈敏,運行速度加快。缺點是存在靜差。在系統穩定的情況下,增大KP值,有利于減小穩態誤差,提高控制精度。但隨著KP增大,系統響應過程中的振蕩次數會增多,調節時間加長。當KP值太大時,系統將趨于不穩定;若太小,會減低系統的響應速度。
引入積分的目的是為了消除靜差,提高精度。但積分時間TI太小,在過程的啟動、結束或大幅度增減設定值時,短時間內系統輸出有很大的偏差,會造成PID運算的積分積累,致使控制量超出極限控制量,最終引起系統較大的超調,甚至造成系統振蕩。積分時間TI太大時,積分作用對系統的性能影響減小,不利于消除系統穩態誤差,難以獲得較高的控制精度。
微分環節的引入,改善了系統的動態特性,對干擾特別敏感。但微分時間TD偏大或偏小時,都會使超調量增大,調節時間加長。
(四)PID參數確定的方法
在選擇了調節規律及相應的調節器后,就要進行PID初始參數的確定。常采用的方法有臨界比例度法(又稱穩定邊界法)、反應曲線法、衰減曲線法、儀表參數自整定法。
1、?臨界比例度法:
調節規律采用純比例,不斷增加K,使調節系統的被調參數作等幅振蕩(即達到穩定邊界)時,測量出比例放大系數Km或臨界比例度Pm以及振蕩周期Tm,然后,按經驗數據求出初始參數。
臨界比例度法的調節器經驗數據表
?
|
調節規律 |
P(%) |
TI |
TD |
|
P |
2Pm |
? |
? |
|
PI |
2.2 Pm |
0.85Tm |
? |
|
PID |
1.7 Pm |
0.5Tm |
0.13 Tm |
2、?反應曲線法:
反應曲線法:要確定調節器的參數應先測定對象的動態特性,即對象輸入量作單位階躍變化時被調量的反應曲線,即飛升曲線。根據飛升曲線可得到等效滯后時間τ、等效時間常數T、廣義對象的放大系數K。再按下表經驗數據求出初始參數。
反應曲線法的調節器經驗數據表
?
|
調節規律 |
P(%) |
TI |
TD |
|
P |
Kτ/T |
? |
? |
|
PI |
1.1 Kτ/T |
3.3τ |
? |
|
PID |
0.85Kτ/T |
2τ |
0.5τ |
3、?衰減曲線法:
衰減曲線法:是參數整定要求達到衰減率為0.75的過程。先把調節規律采用純比例(TI =∞,TD =0),觀察調節過程的衰減比,通過改變比例度,使衰減比達到規定的0.75為止。記下此時的比例度PS和周期TS。然后,按經驗數據得出初始參數。
衰減曲線法的調節器經驗數據表
?
|
調節規律 |
P(%) |
TI |
TD |
|
P |
PS |
? |
? |
|
PI |
1.2PS |
0.85TS |
? |
|
PID |
0.8PS |
0.3TS |
0.1TS |
?
4、?儀表參數自整定法:
現在許多儀表都帶有自整定功能,利用此功能可以方便的整定出,PID參數。但是不是所有都會滿足需要,有時可以在此基礎上做修改,從而達到最佳效果。
三、?實驗內容:
1、?通過臨界比例度法確定PID參數:
1、將流量調節系統的調節規律社為純比例,不斷增加K,使調節系統的被調參數(流量)作等幅振蕩(即達到穩定邊界)。記錄此時的比例度P和振蕩周期Tm。
2、在給SDC31調節器通電在基本顯示狀態下,同時按ENT鍵和○▲鍵3秒;按○▼ 鍵顯示PID;按ENT鍵顯示P讀取比例度讀數;按ENT鍵,進入比例度的設置 ;按鍵○▲鍵修改比例度到合適的值。按ENT鍵,確定。
3、按DISP鍵退出設置。運行系統,觀察曲線。
?
|
臨界比例度法確定PID參數 | |||
|
臨界比例度P |
? |
振蕩周期Tm |
? |
|
調節規律 |
P(%) |
TI |
TD |
|
P |
? |
? |
? |
|
PI |
? |
? |
? |
|
PID |
? |
? |
? |
2、儀表參數自整定確定PID參數:
先給SDC31調節器的供電,在AUTO和RUN下,啟動自整定功能。
(1、)進入基本顯示狀態,按DISP鍵。
(2、)進入At(自整定)顯示,按MODE鍵多次,直到顯示At顯示,再按ENT鍵。
(3、)改變設定值:按○▲鍵使0變為1.
(4、)確定改變設定值:按ENT鍵;At LED燈開始閃動,自整定功能啟動;
(5、)恢復基本顯示狀態: 按DISP鍵,當自整定完成后,At LED燈熄滅。PID參數自動地寫入儀表中。
(6、)讀取PID參數。同時按ENT鍵和○▲鍵3秒;按○▼ 鍵顯示PID;按ENT鍵顯示P讀取比例度讀數;按○▼ 鍵顯示I,讀取讀數;按○▼ 鍵顯示D,讀取讀數,填入相應表格。
?
|
自整定法確定PID參數 | |
|
比例度 |
? |
|
積分時間 |
? |
|
微分時間 |
? |
3、純比例和比例積分條件下的PID控制
運行流量控制系統,調節規律采用純比例。將上面整定的比例度輸入到調節器,稍作修改。待系統穩定,記錄比例度以及余差量。再加積分加入,使余差消除。并記錄此時的積分時間。
?
|
純比例和比例積分條件下的PID控制 | |
|
比例度 |
? |
|
余差 |
? |
|
積分時間 |
? |
四、?問題與解答:
1、?已知某比例式氣動調節器量程為100~200℃,當指針從140℃變化到160℃時,輸出從0.5㎏/㎝2變到0.7㎏/㎝2,輸出范圍為0~1㎏/㎝2求比例度δ;若儀表的量程和輸入變化量維持不變,問比例度為多少時,輸出作全范圍變化?
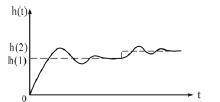
2、?當調節器的輸入偏差信號e的波形如圖所示變化周期等于積分時間,比例度為50%,分別畫出調節器的比例、積分、比例微分輸出的波形。

3、?試說明下列情況下,調節器的調節作用是增強還是減弱?比例微分調節器,保持比例度不變,微分時間由15秒上升到30秒。比例積分調節器,保持積分時間不變,比例度由20%上升到40%。













 工商網監
工商網監
評論