 電子發(fā)燒友App
電子發(fā)燒友App


LED驅(qū)動(dòng)原理方式解析:
(1)被動(dòng)矩陣LCD技術(shù)
高信息密度顯示技術(shù)中首先商品化的是被動(dòng)矩陣顯示技術(shù),它得名于控制液晶單元的開和關(guān)的簡(jiǎn)單設(shè)計(jì)。被動(dòng)矩陣液晶顯示的驅(qū)動(dòng)方式是由垂直與水平方向的電極所構(gòu)成的,且將單獨(dú)的液晶單元夾在彼此垂直的電極中間。因此,任何一組電極的驅(qū)動(dòng)就會(huì)在特定的單元中引起電流通過(guò)。
被動(dòng)矩陣顯示畫面的原理是用輸入的信號(hào)依次去驅(qū)動(dòng)每一排的電極,于是當(dāng)某一排被選定的時(shí)候,列向上的電極將被觸發(fā)用于打開位于排和列交叉上的那些像素。這種方法比較簡(jiǎn)單,而且對(duì)液晶屏幕成本的增加也不多。不過(guò)其存在的缺點(diǎn)是:如果有太大的電流通過(guò)某個(gè)單元,附近的單元都會(huì)受到影響,會(huì)引起虛影;如果電流太小,單元的開和關(guān)就會(huì)變得遲緩,會(huì)降低對(duì)比度和丟失移動(dòng)畫面的細(xì)節(jié)。
早期的被動(dòng)矩陣板依賴于扭轉(zhuǎn)向列的設(shè)計(jì)。其上層和下層的偏光板的偏振光方向呈90°,因此中間的液晶以90°進(jìn)行扭轉(zhuǎn)。這樣制造的液晶板對(duì)比度很低,響應(yīng)時(shí)間也很慢。這種方式運(yùn)用在低信息量顯示時(shí)效果很好,但不適合計(jì)算機(jī)顯示。
超扭轉(zhuǎn)向列(Super Twisted Nematic)方法是通過(guò)改變液晶材料的化學(xué)成分,使液晶分子發(fā)生不止一次的扭轉(zhuǎn),使光線扭轉(zhuǎn)達(dá)到180°到270°,這樣便可大大地改善畫面的顯示品質(zhì)。20波紀(jì)80年代初期,STN技術(shù)一度非常流行,至今它還在便攜式電子設(shè)備如PDA、移動(dòng)電話中使用。雖然STN技術(shù)提高了顯示的對(duì)比度,但它會(huì)引起光線的色彩偏差,尤其是在屏幕偏離主軸的位置上。這就是為什么早期的筆記本計(jì)算機(jī)屏幕總是偏藍(lán)和偏黃的原因。
雙層超扭曲向列型顯示技術(shù)(DSTN)具有兩層扭轉(zhuǎn)方向相對(duì)的LCD層,第二層使得第一層遺留的色偏問(wèn)題得以解決。當(dāng)然它的制造工藝比前兩種方式要復(fù)雜得多。
后來(lái)人們發(fā)現(xiàn)了比DSTN更簡(jiǎn)單易行的方法,就是在底層和頂層的外表面加上補(bǔ)償膜,來(lái)改善STN技術(shù)中所產(chǎn)生的特定波段光線的散射和反射現(xiàn)象,這就是補(bǔ)償膜超扭轉(zhuǎn)向列(Film-compensated STN,F(xiàn)STN)顯示技術(shù)。FSTN的顯示效果和DSTN相當(dāng),但其價(jià)格和工藝難度都大大降低了,所以現(xiàn)在大多數(shù)被動(dòng)式LCD都采用了FSTN技術(shù)。
為了改善采用FSTN技術(shù)的LCD顯示效果,在20世紀(jì)90年代初期提出了雙掃描概念。所謂雙掃描,就是將面板水平對(duì)等地分為兩部分,對(duì)頂端和底端相對(duì)應(yīng)的部分同時(shí)進(jìn)行掃描,這就大大提高了掃描的頻率。雙掃描解決了小電流、長(zhǎng)時(shí)間使用的情況下常常產(chǎn)生的鬼影現(xiàn)象。和主動(dòng)矩陣顯示相比,它顯著提高了對(duì)比度、畫質(zhì),并縮短了響應(yīng)時(shí)間,所以現(xiàn)在還廣為低價(jià)位的筆記本計(jì)算機(jī)所采用。
(2)主動(dòng)矩陣LCD技術(shù)
采用被動(dòng)矩陣LCD技術(shù)的最大問(wèn)題是難以快速地控制單獨(dú)的液晶單元,并以足夠大的電流保證來(lái)獲得好的對(duì)比度、足夠的灰階和較快的響應(yīng)時(shí)間,從而影響了動(dòng)態(tài)影像的顯示效果。主動(dòng)矩陣LCD通過(guò)單獨(dú)地控制每個(gè)單元,有效地解決了上面的問(wèn)題。
與被動(dòng)矩陣LCD相似,主動(dòng)矩陣(ActiveMatrix)LCD的上、下表層也縱橫有序地排列著用銦錫氧化物做成的透明電極。所不同的是在每個(gè)單元中都加入了很小的晶體管,由晶體管來(lái)控制每個(gè)單元回路的開和關(guān)。晶體管電極是利用薄膜技術(shù)做成的,薄膜晶體管LCD(TFT-LCD)也因此得名。
晶體管可以迅速地控制每個(gè)單元,由于單元之間的電干擾很小,所以可以使用大電流,而不會(huì)有鬼影和拖尾現(xiàn)象,更大的電流會(huì)提供更好的對(duì)比度、更銳利的和更明亮的圖像。
單片機(jī)如何根據(jù)LCD時(shí)序圖來(lái)寫底層驅(qū)動(dòng):
單片機(jī)如何根據(jù)LCD時(shí)序圖來(lái)寫底層驅(qū)動(dòng)
一般來(lái)說(shuō),LCD 模塊的控制都是通過(guò) MCU 對(duì) LCD 模塊的內(nèi)部寄存器、顯存進(jìn)行操作來(lái)最終完成的;在此我們?cè)O(shè)計(jì)了三個(gè)基本的時(shí)序控制程序,分別是:
(1)寫寄存器函數(shù)(LCD_RegWrite)
(2)數(shù)據(jù)寫函數(shù)(LCD_DataWrite)
(3) 數(shù)據(jù)讀函數(shù)(LCD_DataRead)
這三個(gè)函數(shù)需要嚴(yán)格的按照 LCD 所要求的時(shí)序來(lái)編寫,下面可以看看 MzL02 模塊時(shí)序圖:
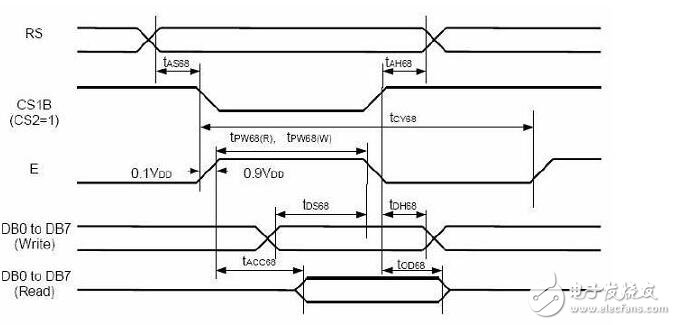
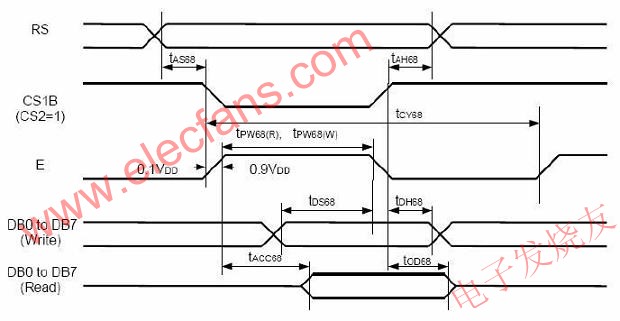
圖 3.2 MzL02 模塊的 6800 時(shí)序示意
注意:上圖是該模塊的控制 IC 資料中的原版時(shí)序圖,其實(shí)有些示意不是太穩(wěn)妥(少標(biāo)出了RW 線信號(hào)的要求),或者說(shuō)是不太嚴(yán)謹(jǐn),不過(guò)這些不作討論,請(qǐng)看分析即可;而 EP 的有效觸發(fā)沿在圖中很有可能示意有誤,實(shí)測(cè)為上升沿。圖中 CS1B(CS2)的信號(hào)即為片選 CS,RS 即為數(shù)據(jù)/寄存器的選擇端口 A0 信號(hào),E 為 EP;當(dāng)作寫入寄存器數(shù)據(jù)操作時(shí),首先要將 A0 置低,以通知 LCD 模塊即將進(jìn)行的是對(duì)寄存器的操作;而 RW 線需要置低,以示即將要進(jìn)行的是寫入的操作;然后片選 CS 信號(hào)置低,裝載數(shù)據(jù)至總線,然后在 EP 線上產(chǎn)生一個(gè)上升沿以觸發(fā) LCD 模塊將總線上的數(shù)據(jù)最終載入;在前面的操作完成后一般都會(huì)將各個(gè)信號(hào)線的狀態(tài)恢復(fù)。而數(shù)據(jù)(顯存)寫入、數(shù)據(jù)讀出的操作時(shí)序也比較類似,這里就不多作介紹,直接參考例程即可。
//=======================================================
// 函數(shù): void LCD_RegWrite(unsigned char Command)
// 描述: 寫一個(gè)字節(jié)的數(shù)據(jù)至 LCD 中的控制寄存器當(dāng)中
// 參數(shù): Command 寫入的數(shù)據(jù),低八位有效(byte)
// 返回: 無(wú)
//======================================================
void LCD_RegWrite(unsigned char Command)
{
LCD_A0 = 0; //A0 置低,示意進(jìn)行寄存器操作
LCD_RW = 0; //RW 置低,示意進(jìn)行寫入操作
LCD_EP = 0; //EP 先置低,以便后面產(chǎn)生跳變沿
LCD_CS = 0; //片選 CS 置低
DAT_PORT = Command; //裝載數(shù)據(jù)置總線
LCD_EP = 1; //產(chǎn)生有效的跳變沿
LCD_CS = 1; //片選置高
}
數(shù)據(jù)寫入以及讀出的函數(shù)源碼如下:
//==========================================================
// 函數(shù): void LCD_DataWrite(unsigned char Dat)
// 描述: 寫一個(gè)字節(jié)的顯示數(shù)據(jù)至 LCD 中的顯示緩沖 RAM 當(dāng)中
// 參數(shù): Data 寫入的數(shù)據(jù)
// 返回: 無(wú)
//==========================================================
void LCD_DataWrite(unsigned char Dat)
{
LCD_A0 = 1; //A0 置高,示意進(jìn)行顯存數(shù)據(jù)操作
LCD_RW = 0; //RW 置低,示意進(jìn)行寫入操作
LCD_EP = 0; //EP 先置低,以便后面產(chǎn)生跳變沿
LCD_CS = 0; //片選 CS 置低
DAT_PORT = Dat; //裝載數(shù)據(jù)置總線
LCD_EP = 1; //產(chǎn)生有效的跳變沿
LCD_CS = 1; //片選置高
}
//=========================================================
// 函數(shù): unsigned char LCD_DataRead(void)
// 描述: 從 LCD 中的顯示緩沖 RAM 當(dāng)中讀一個(gè)字節(jié)的顯示數(shù)據(jù)
// 參數(shù): 無(wú)
// 返回: 讀出的數(shù)據(jù),
//==========================================================
unsigned char LCD_DataRead(void)
{
unsigned char Read_Data;
DAT_PORT = 0xff; //51 的端口想要輸入前,要先給端口全置 1
LCD_A0 = 1; //A0 置高,示意進(jìn)行顯存數(shù)據(jù)操作
LCD_RW = 1; //RW 置高,示意進(jìn)行讀出操作
LCD_EP = 0; //EP 先置低,以便后面產(chǎn)生跳變沿
LCD_CS = 0; //片選 CS 置低
LCD_EP = 1; //產(chǎn)生有效的跳變沿
LCD_EP = 0;
Read_Data = DAT_PORT; //讀出數(shù)據(jù)
LCD_CS = 1; //片選置高
return Read_Data; //返回讀到的數(shù)據(jù)
}
以上便是要介紹的最基本的時(shí)序操作程序,它們幾乎是整個(gè) LCD 驅(qū)動(dòng)程序當(dāng)中與底層硬件打交道的代碼了,這樣的話,當(dāng)要改變驅(qū)動(dòng) LCD 的 MCU 端口時(shí)或者換用別的 MCU 來(lái)驅(qū)動(dòng) LCD 時(shí),基本上只需要在這些代碼里作一下修改即可。
關(guān)于讀LCD狀態(tài)
而在一般的 LCD 模塊當(dāng)中,還有一個(gè)功能同樣重要,就是讀 LCD 狀態(tài);可以通過(guò)此操作獲取當(dāng)前 LCD 模塊的忙狀態(tài)以及一些相關(guān)的狀態(tài)信息,當(dāng) LCD 模塊正處于忙狀態(tài)時(shí),則不宜對(duì)它進(jìn)行數(shù)據(jù)的寫入或讀出操作(有很多較老式的 LCD 控制器規(guī)定在忙的狀態(tài)下時(shí)不允許寫入或讀出數(shù)據(jù))。
所以在很多 LCD 的驅(qū)動(dòng)程序當(dāng)中,會(huì)在寄存器寫入、數(shù)據(jù)寫入/讀出的操作前加入讀取 LCD狀態(tài)并判別忙狀態(tài)的代碼;這點(diǎn)可以參考網(wǎng)上流傳的很多 LCD 驅(qū)動(dòng)程序。不過(guò),對(duì)于 MzL02這樣的較新出的 LCD 控制器來(lái)說(shuō),已經(jīng)對(duì)忙狀態(tài)不是很在乎了,或者說(shuō)影響已經(jīng)很小甚至沒(méi)有了;所以我們?cè)谇懊娴拇a當(dāng)中并沒(méi)有加入這樣的代碼。至于有沒(méi)有必要加讀狀態(tài)判忙的代碼,要視具體的 LCD 控制器而定。
關(guān)于時(shí)序的時(shí)間要求
時(shí)序的一個(gè)非常重要的數(shù)據(jù)就是類似上圖中標(biāo)出的tAS88之類的時(shí)間長(zhǎng)短要求,只是上圖中并沒(méi)有標(biāo)出它們的具體最大最小值要求而已;但在編寫這類的時(shí)序接口程序時(shí)它們還是非常重要的,當(dāng)然還要看 MCU 的端口操作速度以及 MCU 的指令執(zhí)行速度。打個(gè)比方,有的時(shí)序里就會(huì)有要求某些信號(hào)的電平保持最小寬度,而如果 MCU 的指令執(zhí)行速度以及端口操作速度非常快的話,就需要酌情在連續(xù)操作端口的代碼之間加入適量的延時(shí)(通用用空操作來(lái)代替,具體多少個(gè)多少時(shí)長(zhǎng)視具體的 MCU 以及 LCD 控制器而定)以保證該信號(hào)的脈沖寬度滿足要求。
在本文的所列出的源代碼當(dāng)中,并沒(méi)有如前所述的為時(shí)序的要求而插入空操作或延時(shí)處理,因?yàn)?MCU 的速度并不是非常快,況且現(xiàn)在的 LCD 控制器的總線速度都挺快的了,沒(méi)有必要加入而已。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論