開疆Profinet轉(zhuǎn)Ethernet IP網(wǎng)關連接在視覺機器人中發(fā)揮著重要的作用,它不僅為機器人提供了高效的數(shù)據(jù)傳輸和遠程控制,還促進了系統(tǒng)集成和智能化發(fā)展。
Profinet轉(zhuǎn)Ethernet
2024-03-18 11:29:00
?? ? ? 據(jù)不完全統(tǒng)計,全世界在役的工業(yè)機器人中大約有將近一半的工業(yè)機器人用于各種形式的焊接加工領域,焊接機器人應用中最普遍的主要有兩種方式,即點焊和弧焊。這些焊接機器人中有的是為某種焊接方式
2024-03-18 08:39:51 14
14 Arduino IDE 機器人元器件 機器人套件
2024-03-14 23:22:09
Raspberry Pi pHAT 機器人元器件 機器人套件
2024-03-14 22:34:43
Arduino 機器人元器件 機器人套件
2024-03-14 22:34:43
云臺 機器人套件
2024-03-14 22:33:42
輪式 機器人套件
2024-03-14 22:33:28
輪式 機器人套件
2024-03-14 22:29:39
機器人元器件 機器人套件
2024-03-14 22:03:38
Makeblock Me 機器人元器件 機器人套件
2024-03-14 21:40:36
抓爪 機器人套件
2024-03-14 21:40:28
輪式 機器人套件
2024-03-14 21:30:12
抓爪 機器人套件
2024-03-14 21:13:28
坦克胎面 機器人套件
2024-03-14 21:13:28
抓爪 機器人套件
2024-03-14 21:13:24
機器人元器件 機器人套件
2024-03-14 21:13:23
機器人元器件 機器人套件
2024-03-14 20:37:55
輪式 機器人套件
2024-03-14 20:37:52
機器人元器件 機器人套件
2024-03-14 20:37:45
兩足 機器人套件
2024-03-14 20:35:14
廣泛應用于大型機器人的開發(fā)中。在具體實踐時,為了提高軟體機器人在行走、醫(yī)療操縱和物體抓取等方面的可操作性,建造具有柔性和可變?nèi)S結(jié)構(gòu)的軟體機器人至關重要。
實驗目的:測試軟體材料的性能,通過結(jié)構(gòu)設計
2024-02-27 17:15:22
機器人運動學中的運動學約束是指機器人在運動過程中受到的限制,包括位置、姿態(tài)、速度和加速度等因素。這些約束會對機器人的自由度產(chǎn)生影響,從而影響機器人的運動和控制。運動學約束通常用數(shù)學模型來描述,為機器人的運動控制提供了理論基礎。
2024-01-18 16:45:24332 
機器人可以說是目前最炙手可熱的話題,人形機器人和通用人工智能可以說是未來科技行業(yè)的制高點,工業(yè)和信息化部將人形機器人定位為“集成人工智能、高端制造、新材料等先進技術(shù),有望成為繼計算機、智能手機、新能源汽車后的顛覆性產(chǎn)品,將深刻變革人類生產(chǎn)生活方式,重塑全球產(chǎn)業(yè)發(fā)展格局”。
2024-01-12 10:56:11335 
LabVIEW開發(fā)六軸工業(yè)機器人運動控制系統(tǒng)
本項目開發(fā)了一個高效的工業(yè)機器人控制系統(tǒng),重點關注于運動學算法和軌跡規(guī)劃算法的實現(xiàn)和測試。LabVIEW作為一個關鍵技術(shù),在項目中扮演了核心角色
2023-12-21 20:03:18
通信。
MPU6050的主要作用是幫助機器人實現(xiàn)姿態(tài)感知和運動控制,提高機器人的自主性和靈活性。
遙控手柄UI控制(LVGL)
作者本人還利用R128開發(fā)板來移植了一個酷炫的LVGL遙控手柄UI,通過
2023-12-20 10:22:18
深圳開鴻數(shù)字產(chǎn)業(yè)發(fā)展有限公司(以下簡稱”深開鴻“)OpenHarmony生態(tài)建設能力和在新興行業(yè)領域的技術(shù)創(chuàng)新實力,也標志著OpenHarmony在新興行業(yè)領域又向前邁進了一步。
夸父人形機器人由深開
2023-12-20 09:31:19
功率放大器模塊是一種電子設備,它可以將輸入信號的功率轉(zhuǎn)換為輸出信號的功率。在水下機器人中,功率放大器可以起到驅(qū)動電機、傳感器等負載的作用,是實現(xiàn)水下機器人功能的重要組成部分之一。下面將詳細介紹
2023-12-18 16:25:26165 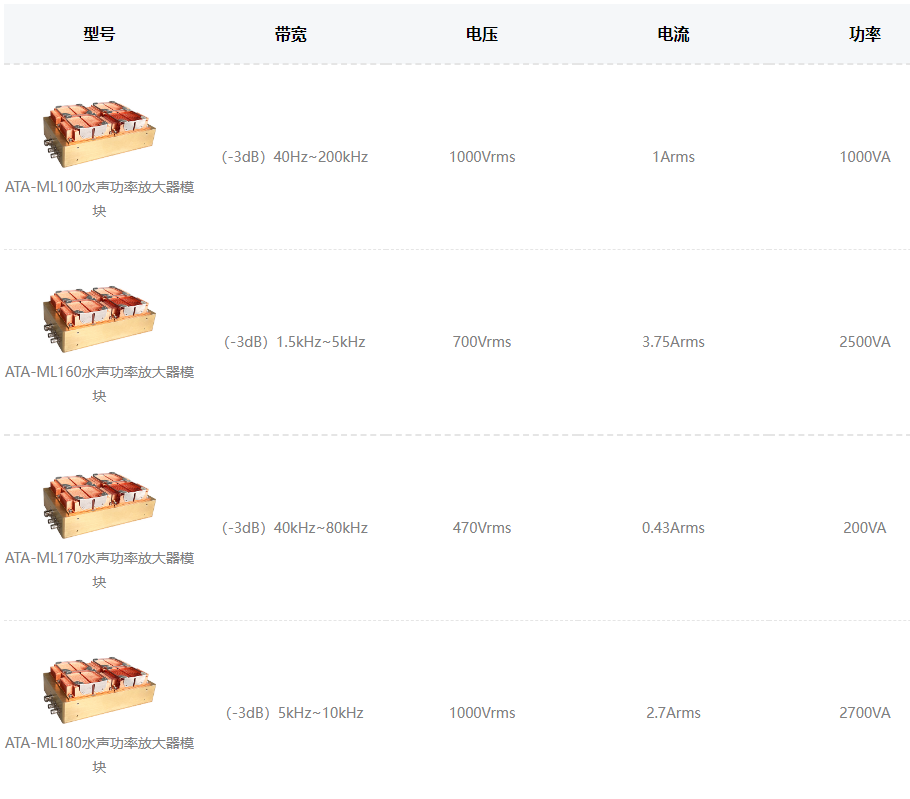
復合機器人
本項目中,履足式復合機器人擁有兩種行進模式:四足行進模式、履帶行進模式,應對不同場景及地形時能夠切換形態(tài)。四足形態(tài)下整體總共擁有8個自由度DOF,單腿各具備2個自由度DOF,足端結(jié)構(gòu)融入
2023-12-12 10:28:32
大大提高了工作效率,也極大地提升了實驗精度。自動移液機器人是一種能夠代替人工進行精確液體操作的自動化設備。它通過精密的機械結(jié)構(gòu)和先進的控制系統(tǒng),實現(xiàn)了對微小液體體積的準
2023-12-06 11:21:24
ROS系統(tǒng)是什么
ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統(tǒng)。它提供了操作系統(tǒng)應有的服務,包括硬件抽象,底層設備控制,常用函數(shù)的實現(xiàn),進程間消息傳遞
2023-11-30 16:01:01
在現(xiàn)代工業(yè)自動化領域,機器人的運用越來越廣泛。在這些機器人中,電弧跟蹤傳感器是一種非常重要的傳感器,能夠幫助機器人實現(xiàn)對電弧的跟蹤和控制。那么,電弧跟蹤傳感器通常安裝在機器人什么位置呢? 電弧跟蹤
2023-11-23 15:02:57202 坐標系是我們非常熟悉的一個概念,也是機器人學中的重要基礎,在一個完整的機器人系統(tǒng)中,會存在很多坐標系,這些坐標系之間的位置關系該如何管理? ROS給我們提供了一個坐標系的管理神器——TF。 機器人中
2023-11-22 17:20:23460 
電子發(fā)燒友網(wǎng)站提供《MCx8316x在掃地機器人中的應用.pdf》資料免費下載
2023-11-22 09:37:19 0
0 ,這就對控制算法提出了更高的要求。 由于驅(qū)動系統(tǒng)飽和限制或任務要求,對機器人的運動速度和加速度有一定的約束。 為了分別滿足位置和姿態(tài)的速度、加速度幅值約束,往往需要分別對位置和姿態(tài)進行時間同步的軌跡規(guī)劃,保證機器人的
2023-11-10 16:40:48234 pic單片機做掃地機器人有什么優(yōu)勢
2023-11-09 07:24:46
機器人編程需要什么軟件
2023-11-01 07:34:30
PX5作為小鵬機器人中心的獨立研發(fā)項目,開發(fā)時間并不長。據(jù)了解,短短不到六個月內(nèi),PX5便經(jīng)歷了兩次重大迭代。這種快速發(fā)展得益于機器人團隊在過去兩年中在四足機器人領域積累的豐富經(jīng)驗。
2023-10-25 12:33:04200 人形機器人中常用的傳感器種類和用量,包括視覺類傳感器、麥克風陣列、觸覺類傳感器、溫度傳感器等。同時還討論了不同傳感器的作用和組合方式,以及在機器人內(nèi)部的布置和測試。根據(jù)對話片段,人形機器人的成本主要由傳感器、力控和關節(jié)等部分構(gòu)成。
2023-10-17 11:11:58402 四軸在飛行的控制過程中可以用什么算法來控制?姿態(tài)
2023-10-12 07:03:10
滾珠螺母在工業(yè)機器人中的應用優(yōu)勢
2023-10-11 17:46:37551 
卡爾曼濾波可以用于四軸的姿態(tài)數(shù)據(jù)處理嗎
2023-10-10 07:29:23
四軸的姿態(tài)進行采樣用通常是用什么濾波算法進行濾波的
2023-10-09 06:42:49
本文檔的主要內(nèi)容詳細介紹的是Arduino教學機器人的使用教程
2023-09-27 06:53:26
今天和大家分享一下工業(yè)機器人中使用到的電子控制器模塊。現(xiàn)代工業(yè)機器人已經(jīng)廣泛應用于各行各業(yè)。雖然我們不一定開發(fā)機器人,但是作為工程師,還是很有機會來使用機器人來方便我們的工作和生活的。工業(yè)機器人
2023-09-26 08:08:43549 
用esp8266做過小四足機器人,這次用esp32C3重制了,主要的原因是C3有藍牙可以用藍牙遙控非常方便邊,隨時連接隨時玩不占用手機WiFi。
而且esp32C3雖然管腳不多,但在8路舵機的控制
2023-09-21 11:15:37
的進行監(jiān)控管理。
智能電話機器人的另一個優(yōu)勢是不知疲倦,不需要休息和喝水,不需要休息。人在工作時就會有各種各樣的脾氣,但智能電話機器人不會,永遠都以最嚴謹、最周到的態(tài)度和客戶進行溝通。
在科技高速發(fā)展
2023-09-21 11:09:59
人形機器人的自主運動,除了許多組件之間的相互作用,主要的挑戰(zhàn)是電源和各個部件所需的空間。微型傳動方案是解決這關鍵問題的解決方案。它們具備相當大的功率密度,結(jié)合高效率和最小的所需空間,提高了扭矩使機器人可以長時間靈活運動。
2023-09-21 10:33:22257 機器人使用了大量的現(xiàn)代電子信息和控制技術(shù),比如機器人的控制系統(tǒng),轉(zhuǎn)動利用的電機驅(qū)動技術(shù),采集和定位使用了傳感和視覺檢測以及計算機分析計算技術(shù),執(zhí)行機構(gòu)同樣用到了精確控制技術(shù)。
2023-09-21 10:05:54167 邁步手部康復外骨骼機器人,機器人可以帶動手指完成兩種康復運動——雙向彎曲運動和內(nèi)收外展運動。機器人可適應不同患者的手指尺寸,外骨骼手的長度可調(diào)節(jié),長時間佩戴不會使患者產(chǎn)生疲勞感。手部康復外骨骼機器人
2023-09-20 17:38:02
下肢外骨骼康復機器人BEAR-A1利用仿生學、人體工學、機器人技術(shù),為下肢運動功能障礙者提供康復訓練。通過對患者髖、膝關節(jié)提供助力完成康復訓練,可以有效降低治療師工作強度,提高康復訓練效率,提高患者
2023-09-20 17:31:33
邁步機器人BEAR-H系列是用于輔助腦卒中患者步態(tài)康復訓練的新型可穿戴式下肢外骨骼機器人。機器人擁有主動被動訓練模式,通過對患者髖、膝、踝關節(jié)提供助力完成行走訓練,可以節(jié)省人力,并提高康復效果
2023-09-20 17:25:48
利用 Matlab 建立移動機器人的動力學模型 ,在虛擬現(xiàn)實 (VR )環(huán)境下 ,實時仿真移動機器人路徑跟蹤的運動特性 ,為基于 Internet 的機器人遙操作試驗搭建了仿真平臺 。 實驗結(jié)果表明
2023-09-20 06:24:09
電子發(fā)燒友網(wǎng)站提供《機器人中的自適應計算.pdf》資料免費下載
2023-09-14 09:49:050 新唐AHRS應用軟件在哪下載
2023-08-28 07:45:38
MA600(MA600)用例:精密機器人 本用例將介紹MA600(MA600)在精密機器人中的應用。 MA600(MA600)憑借其高精度、高分辨率與高帶寬,可與光學編碼器展開激烈競逐,并完美替代
2023-08-25 11:29:16540 產(chǎn)品介紹小安值班機器人是集電力監(jiān)控系統(tǒng)、動環(huán)輔控系統(tǒng)、巡檢機器人“三合一"功能產(chǎn)品,在自學習算法和大數(shù)據(jù)的加持下,具備強大的AI能力,可實現(xiàn)配電室的數(shù)字化及無人值守。 特色功能全感知電力
2023-08-22 14:57:47
點就是在移動端能看到的信息,本文共設置了五個數(shù)據(jù)點分別為:采摘數(shù)量、相機狀態(tài),機器人電量、機械手狀態(tài),機器人姿態(tài)。創(chuàng)建數(shù)據(jù)點的信息如圖2.5所示。其中設置采摘最大統(tǒng)計數(shù)量為65536,并且為可寫模式
2023-08-16 17:35:54
焊接機器人的編程主要是將機器人控制器上的程序指令輸入到機器人中,使其能夠完成復雜和精密的焊接操作。
2023-07-29 08:19:051244 機器人對MCU有獨特的需求。經(jīng)過優(yōu)化用于機器人的 MCU 通常包含多種功能,包括內(nèi)置互聯(lián)網(wǎng)協(xié)議 (IP) 連接、信息安全和功能安全保護以及高級控制算法。將 MCU 內(nèi)核與現(xiàn)場可編程門陣列 (FPGA) 集成是優(yōu)化機器人應用的一種手段。
2023-07-24 14:10:11286 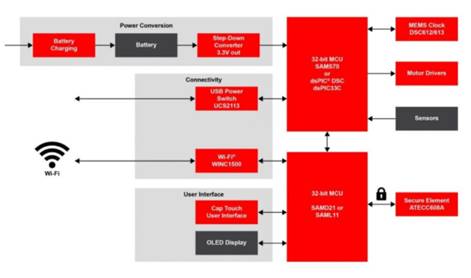
焊接姿態(tài),尤其是焊接時的前進角和焊接傾角是影響焊接質(zhì)量的兩個重要因素。本文介紹的“TorchAngle“功能,機器人可以適時計算出當前的焊接前進角和焊接傾角,適時地顯示當前的兩個焊接角度,為焊槍角度的調(diào)整和焊接工藝優(yōu)化方向提供數(shù)據(jù)基礎。
2023-07-23 16:04:06550 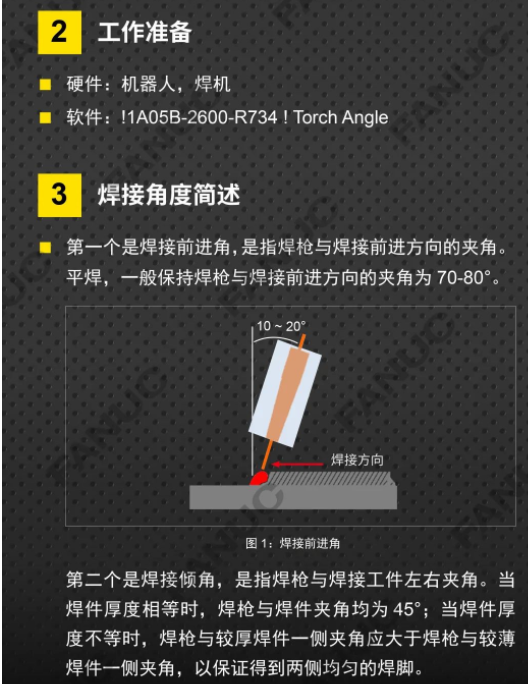
移動機器人導航是指移動機器人確定自己在地圖參考系中的位置后,自動規(guī)劃出通往地圖參考系中某個目標位置路徑并沿著該路徑到達目標位置點的能力,是移動機器人行動能力的關鍵。
基于整個智能制造的發(fā)展
2023-06-28 09:52:41
與實現(xiàn)移動機器人控制
移動機器人的自主導航系統(tǒng)及上位機軟件設計與實現(xiàn)是移動機器人技術(shù)的重要組成部分,是實現(xiàn)機器人智能化的關鍵。 在現(xiàn)階段發(fā)展的移動機器人中,底層核心技術(shù)的發(fā)展確實是非常重要的,相信在未來
2023-06-28 09:36:32
,適用于那些需要角度不斷變化并可以保持的控制系統(tǒng)。目前在高檔遙控玩具,如航模,包括飛機模型,潛艇模型;遙控機器人中已經(jīng)使用得比較普遍。舵機是一種俗稱,其實是一種伺服馬達。
2023-06-20 07:46:30
小型機器人為什么可以自由地展現(xiàn)多種姿態(tài)與動作呢?
2023-06-19 08:13:55
我在 Arduino Nano 的幫助下制作了一個四足機器人。但我經(jīng)常遇到 HC-05 藍牙模塊的問題。所以現(xiàn)在我正在考慮用 ESP8266 替換 Arduino。誰能幫我這個?
2023-06-02 08:12:06
其中一個方法是利用人類的運動方式來訓練機器人,為人工智能提供現(xiàn)實生活的數(shù)據(jù)。這些數(shù)據(jù)是通過基于慣性傳感器的Xsens Link系統(tǒng)和Xsens Metagloves by Manus手套來采集的。
2023-06-01 17:45:36726 
可以)我想發(fā)送 WSN 傳感器節(jié)點發(fā)送的溫度數(shù)據(jù),并在溫度達到 33 攝氏度時
點亮 WSN 機器人中的 LED代碼基于網(wǎng)格示例,我能夠發(fā)送數(shù)據(jù)并獲取數(shù)據(jù)有趣的問題是當我在串行上寫入數(shù)據(jù)時我無法使用該數(shù)據(jù)來驅(qū)動我的機器人數(shù)據(jù)是“0”我不知道該怎么做需要幫助..
2023-05-22 09:55:59
兒童陪護機器人中得到了廣泛應用。
在兒童陪護機器人中,步進電機芯片主要用于轉(zhuǎn)動控制。在此過程中,控制器通過對步進電機芯片輸出的脈沖信號進行控制,使得步進電機以一定的步距旋轉(zhuǎn),從而實現(xiàn)機器人的轉(zhuǎn)動控制
2023-05-11 15:12:45
相機標定(Camera Calibration):因為上面做的只是計算了物體在相機坐標系下的坐標,我們還需要確定相機跟機器人的相對位置和姿態(tài),這樣才可以將物體位姿轉(zhuǎn)換到機器人位姿。
2023-04-21 14:15:55328 定位, 且轉(zhuǎn)動慣性小,動態(tài)響應快。主要應用包括自動化生產(chǎn)線,機器人關節(jié),機器人關節(jié)、醫(yī)醫(yī)療儀器及設備、精密儀器和工業(yè)控制系統(tǒng),以及其他許多的應用。
2023-04-20 10:07:10
目前機器人被廣泛地應用到各個行業(yè)中,機器人能夠生產(chǎn),傳感器可是發(fā)揮了很大的作用,常用的幾種機器人傳感器大家知道嗎?在工業(yè)自動化領域,機器需要傳感器提供必要的信息,以正確執(zhí)行相關的操作。
2023-04-19 15:20:19474 泰科關節(jié)機器人具備哪些優(yōu)勢? 一、編程簡單可以讓無編程經(jīng)驗的操作人員能快速設置和操作我們的直觀、3D 可視化協(xié)作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
RJS-II系列關節(jié)模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協(xié)作機器人關節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機器人在更多復雜環(huán)境中的適應性和穩(wěn)定性
2023-04-19 15:03:00
RJS-II系列關節(jié)模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協(xié)作機器人關節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機器人在更多復雜環(huán)境中的適應性和穩(wěn)定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15協(xié)作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業(yè)任務。這款協(xié)作
2023-04-19 11:43:30
深圳泰科智能TA6系列協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
TA6-R5協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 10:58:47
,讓機器人開發(fā)更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩(wěn)定性更好減少機器人開發(fā)過程
2023-04-19 10:40:37
定位, 且轉(zhuǎn)動慣性小,動態(tài)響應快。主要應用包括自動化生產(chǎn)線,機器人關節(jié),機器人關節(jié)、醫(yī)醫(yī)療儀器及設備、精密儀器和工業(yè)控制系統(tǒng),以及其他許多的應用。
2023-04-18 17:35:19
TA6-R5協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
用該操作步驟可將項目中的每個機器人控制系統(tǒng)分配給一個實際應用的機器人控制系統(tǒng)。
2023-04-17 17:28:541204 深圳泰科智能TB6-R10協(xié)作機器人是一款功能更強的工業(yè)級協(xié)作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業(yè)任務,可應用于工廠自動化、汽車、3C、醫(yī)療、電力、科研、教育等多個行業(yè)、多場景的自動化需求。
2023-04-17 16:36:37
RJU系列關節(jié)模組——面向商業(yè)、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機器人關節(jié),而是一款能夠給機器人更多設計空間,和應用領域的關節(jié),客戶
2023-04-17 16:25:29
深圳泰科智能TB6-R10協(xié)作機器人是一款功能更強的工業(yè)級協(xié)作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業(yè)任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10協(xié)作機器人是一款功能更強的工業(yè)級協(xié)作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業(yè)任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:40:56
深圳泰科智能TB6系列協(xié)作機器人是泰科智能自主研發(fā)的6軸輕型協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。采用自主設計研發(fā)RJSII系列關節(jié)模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:31:15
深圳泰科智能TB6系列協(xié)作機器人是泰科智能自主研發(fā)的6軸輕型協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。采用自主設計研發(fā)RJSII系列關節(jié)模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:25:07
深圳泰科智能TB6-R5協(xié)作機器人是一款靈活的輕型工業(yè)協(xié)作機器人,具有精巧的機械結(jié)構(gòu)設計。這款協(xié)作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產(chǎn)
2023-04-17 15:15:06
RJS-II系列關節(jié)模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協(xié)作機器人關節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機器人在更多復雜環(huán)境中的適應性和穩(wěn)定性
2023-04-17 15:02:00
掃地機器人在進行清潔工作的過程中,需要涉及到地面的清洗和水的使用。為了避免機器因為水量過多或不足而造成電路故障或無法正常運作的情況,需要通過液位檢測來控制水量。在清水箱中,一個水位傳感器被置于填充
2023-04-15 11:21:46
整個檢測系統(tǒng)的工作效率,在特種機器人領域的發(fā)展中扮演著十分重要的角色。以上就是基于飛凌嵌入式FETMX8MP-C核心板的智能巡檢機器人應用方案,希望能夠?qū)δ捻椖窟x型提供幫助。點擊上圖進入飛凌嵌入式官網(wǎng),即可了解有關FETMX8MP-C核心板的更多詳情。
2023-04-12 15:49:23
焊接機器人運動控制是什么?是指通過控制焊接機器人執(zhí)行運動的方式,實現(xiàn)對焊接過程中姿態(tài)、速度、位置等參數(shù)的控制,從而實現(xiàn)焊接任務的完成。
2023-03-31 09:50:28693 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論