機器人元器件 機器人套件
2024-03-14 22:03:38
機器人元器件 機器人套件
2024-03-14 21:13:23
機器人元器件 機器人套件
2024-03-14 20:37:55
機器人元器件 機器人套件
2024-03-14 20:37:45
在這個裝配任務中,我們不僅要求機器人能學會兩個零件之間的對應關系與合適的組裝角度,還要求機器人能準確地將兩個零件對齊并最終合二為一,這就需要機器人的兩個機械臂之間具備高度的協調性。
2024-03-06 14:37:48 72
72 VX8000系列零件快速測量檢測設備儀器是使用一種新型影像測量技術的精密測量儀器,能一鍵測量二維平面尺寸測量,或是搭載光學非接觸式測頭實現高度尺寸、平面度等參數的精密快速測量。目前被廣泛應用于3C
2024-03-06 11:07:09
ZR機械手:推動制造業向更高水平發展-速程精密 隨著科技的不斷發展,制造業正面臨著巨大的變革。在這個過程中,ZR機械手以其卓越的性能和創新的技術,成為了推動制造業向更高水平發展的重要力量。 ZR
2024-02-28 15:06:08112 
引言 我是一名專注于機器學習和機器人技術自由者。我的熱情始于大學期間的人工智能課程,這促使我探索人機交互的新方法。尤其對于機械臂的操作,我一直想要簡化其復雜性,使之更加直觀和易于使用。 這個項目
2024-01-31 16:17:12158 
伴隨著智能手機的普及,手機零部件的質量和性能成為企業關注的焦點。作為質量控制的重要環節,手機零部件氣密性檢測對保證產品質量具有重要意義。本文將探討企業如何選擇合適的手機零件氣密性檢測儀。1.明確檢測
2024-01-22 11:54:32239 
引言 大象機器人的Mercury系列,是面向工業自動化和智能制造的新型機械臂產品線。這些機械臂不僅在設計上創新,還在材料選擇上使用了碳纖維、鋁合金和工程塑料等輕質強韌材料,搭載高精度諧波減速器
2024-01-15 14:41:42226 
ZR機械手:技術升級,推動產業變革 隨著科技的飛速發展,自動化設備在各個產業領域中的應用越來越廣泛。作為自動化設備的重要組成部分,機械手在提高生產效率、保證產品質量、降低勞動成本等方面發揮
2024-01-11 09:21:59143 如何為特定場所選擇合適的消防應急燈? 消防應急燈在緊急情況下扮演著至關重要的角色,它能為人們提供明亮的照明,引導人們安全疏散。然而,不同的場所對應急燈的需求也不盡相同。那么,如何為特定場所選擇合適
2024-01-04 20:41:46205 ? ? ?隨著科技的不斷發展,許多傳統行業正在逐漸引入自動化技術,以提高生產效率和降低成本。面粉廠也不例外,其中碼垛機械手作為一種自動化設備,已經逐漸成為面粉廠中不可或缺的一部分。本文將探討面粉廠
2023-12-28 16:43:14139 如何為10G網絡選擇合適的超六類網線 在選擇適合10G網絡的超六類網線時,有幾個重要的方面需要考慮,包括帶寬需求、電纜長度、和電纜構造。本文將從這些方面詳細解析如何選擇合適的超六類網線。 首先,我們
2023-12-27 10:56:30309 鐘表與儀表零件,大多數都是由表殼、表帶、安裝板、齒輪、齒條、游絲、軸孔等細小精密零件組合,儀表的質量除了制造精度外,其金屬表面耐磨性、裝飾性、表面鍍膜前處理清潔度也是質量的重要指標。要保證整體產品
2023-12-24 11:04:57
ZR機械手:工業自動化的新選擇-速程精密 隨著工業自動化的不斷發展,越來越多的企業開始尋求更高效、更精準的自動化解決方案。速程精密成功研發的ZR機械手,作為一種新型的工業自動化設備,正在成為許多企業
2023-12-19 18:16:03687 直線模組是一種常見的機械傳動裝置,廣泛應用于機械手等自動化設備中,在機械手中的主要作用是實現機械手的運動控制和定位。
2023-12-07 17:38:28226 
如何為多設備選擇合適的電源適配器? 選擇合適的電源適配器對于多設備用戶非常重要。無論是智能手機、平板電腦、筆記本電腦還是其他電子設備,都需要適應不同的功率需求和插頭類型。在本文中,我將詳細介紹如何為
2023-11-24 14:15:26359 該系統可以實現機械手與現有的掃地機器人無縫集成,只需對真空機器人進行較少的改動即可輕松連接和拆卸機械手,并在不影響掃地機器人原始功能的基礎上對進行更為廣泛的功能擴展。
2023-11-16 10:40:19440 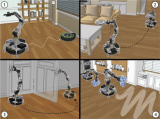
注塑機械手的配件中滾珠螺桿是重要的一環,在注塑機械手中起著重要的作用。注塑機械手是一種自動化設備,可以在注塑生產中實現自動化操作,而滾珠螺桿則是實現這一操作的關鍵部件之一。
2023-11-13 17:41:43179 
機器人編程需要什么軟件
2023-11-01 07:34:30
觸覺感知技術在人機交互領域具有重要價值。分布在軟體機械手的觸覺傳感器能夠在非結構化的場景交互中為人們提供多模態感知信息,如接觸狀態(穩態、滑動、扭轉等)、表面特征(粗糙度、紋理、曲率等)、物理屬性
2023-10-24 11:46:36305 
(形狀、重量、剛度等),這些信息對于機器人與環境、環境與人、人與機器人的安全交互起到了至關重要的作用。具有觸覺感知的軟體機械手更加智能化,且更具安全性與靈活性,可在醫療、農業、軍事等領域得到更廣泛應用。
2023-10-18 10:35:04222 模板的尺寸直接決定了注塑機機械手的行程;安全門的高度關系到貨物從模具內部順利取出到模具外部的情況。在確定了這兩個關鍵標準后,有必要考慮注塑機機械手的有效載荷是多少,以及它是否滿足注塑制品的重量。之后
2023-10-18 08:07:45419 
報名地址點擊報名
直播簡介
1.了解機械手視覺引導的應用場景
2.了解scara機器人運動學正逆解
3.了解相機畸變矯正方法
4.了解手眼標定-9點標定方法
5.了解機械手旋轉中心標定方法
6.了解
2023-10-17 15:37:40
觸覺感知技術在人機交互領域具有重要價值。分布在軟體機械手的觸覺傳感器能夠在非結構化的場景交互中為人們提供多模態感知信息
2023-10-17 09:05:20467 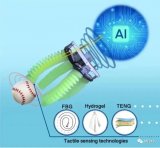
電子發燒友網站提供《教你怎樣選擇合適的工業機器人.doc》資料免費下載
2023-10-10 10:21:00 0
0 主板隱藏到了機殼內,電池使用16240鋰電池。
esp32c3使用合宙的9.9的esp32c3開發板,大大的簡化了電路的設計,需要自行焊接的零件只有十幾個,非常容易。
遙控軟件使用微信小程序開發,由于
2023-09-21 11:15:37
尺寸測量儀適用于哪些零部件?
1、圖像尺寸測量儀適用于各類機械零部件。
采用機器視覺技術,結合高精度圖像分析算法,并融入一鍵閃測原理。
不管是金屬制品還是塑料制品,無論是復雜的結構零部件還是簡單
2023-09-11 16:44:36
誤區六:選擇機器人系統只依賴于控制系統的優劣大多數機器人制造商考慮更多的可能是機器人的控制器而不是機械性能。但是假定一旦配置了機器人,正常運轉時間就主要依賴于機械的耐用性。機器人性能差,很可能
2023-09-05 08:08:52347 ,也即在收獲一定數量后可以手動清零數量。電量的數據類型為報警模式當電壓低于11.7v時進入報警狀態,機器人姿態的角度范圍為0度到360度,相機狀態和機械手狀態均用布爾值來表示。
?
圖2.5 數據
2023-08-16 17:35:54
直線模組在機械手中的應用
2023-08-04 17:48:22816 
全自動拆包機械手 常見的PP、PE、PVC塑料顆粒通常是由人工進行破包上料,為題升自動化水平減少人工成本,很多企業開始用拆包機械手進行這一作業,拆包機械手是由機器人拆垛系統、包裝袋輸送系統
2023-08-03 10:48:21364 
爬壁機器人的零件組成可以根據不同的設計和應用而有所差異。以下是一般常見的爬壁機器人零件。
2023-08-01 16:15:09858 本論文根據機械手控制應用,設計了一套基于PLC基于PLC控制機械手控制設計。PL與數控技術、工業機器人并為工業自動化三大支柱,PLC既保留了原來可編程序邏輯控制器的所有優點,又吸收和發展了其他
2023-07-18 15:31:173 電子發燒友網站提供《如何制作無線/手勢控制機械手.zip》資料免費下載
2023-07-10 15:04:421 ?全自動拆包機械手 全自動拆包機械手是由機器人拆垛機、皮帶進料機、破袋裝置、篩分裝置、中間支架、收塵裝置、螺旋輸送機、控制箱七部分組成,它結構緊湊,精巧美觀,操作簡單方便,消耗功率小,安裝快捷方便
2023-06-28 10:12:30156 節機械手或多自由度機器人,在工業生產 加工過程中通過自動控制來代替人類執行某些單調、頻繁和重復的長時間作業,主要包括 焊接機器人、搬運機器人、碼垛機器人、包裝機器人、噴涂機器人、切割機器人和凈室機 器人。工業機器人在機械結
2023-06-26 10:13:10276 
梳理、分析了核化工項目中各類機械手的工作原理和功能特點,并就各類機械手的適用場景進行了對比,介紹了在選擇和設計機械手時需考慮的因素,總結了當前的研究進展和未來的發展趨勢,以期為今后其他項目的機械手
2023-06-25 14:23:052141 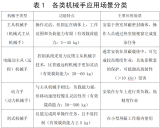
把PLC學會之后再學工業機器人,因為一是工業機器人是集計算機、電子、自動控制技術、機械制造于一體的典型的機電一體化產品。
2023-06-25 10:47:03580 全自動破袋機械手,拆袋破袋機器人是全自動、智能化、一體化原料包裝袋拆垛、拆包、回收、輸送、除塵系統。除叉車上垛外,無需人工操作,它是由機械手抓手將要拆卸的物料袋抓取提升至割袋裝置上方,由割刀裝置
2023-06-24 15:32:26403 設計了一種窨井清挖機械手液壓系統,首先擬定窨井清挖機械手液壓系統原理圖,該液壓系統由定量泵、電磁溢流閥、電磁換向閥、液壓鎖、雙單向節流閥、單向順序閥、調速閥及液壓缸等元件組成,液壓系統每個支路獨立動作實現機械手的工作循環;然后利用AMESim仿真軟件對該液壓系統進行仿真,驗證了方案的可行性。
2023-06-15 14:12:27376 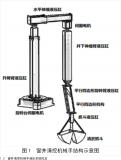
工業機器人是廣泛用于工業領域的多關節機械手或多自由度的機器裝置,具有一定的自動性,可依靠自身的動力能源和控制能力實現各種工業加工制造功能。工業機器人被廣泛應用于電子、物流、化工等各個工業領域之中,其中如下5個領域被應用最為廣泛。
2023-06-12 17:07:483838 工業機器人是面向工業領域的多關節機械手或多自由度的機器裝置,它能自動執行工作,是靠自身動力和控制能力來實現各種功能的一種機器。
2023-06-09 11:42:043039 
對于自動化行業的資深的機電工程師來說,選擇合適的機器人也許是一個簡單的工作。但是對于那些第一次準備購買、導入機器人的設計人員或工廠來說,也許會有些迷茫。如何選擇一個合適的工業機器人?下面簡單介紹下工業機器人選型需要考慮的原則:
2023-06-08 16:00:591103 , 提供合適的泄露檢測設備, 滿足汽車零件生產和研發要求.汽車中需要檢漏的零部件 動力總成和底盤發動機缸體和機頭驅動軸傳動裝置減震器車輪, 車燈電
2023-06-02 13:30:28
我們使用的是 T1042,并在該論壇上找到了一個引腳表來幫助創建零件。但是,看起來提供的引出線根據每個外設重復了引出線。這個 pinmux 文檔的版本是否沒有每個外設的重復引腳,所以我們可以插入我們的原理圖符號生成器?
2023-05-31 09:58:36
平面關節型機械手設
2023-05-29 11:11:330 工業機器人是廣泛用于工業領域的多關節機械手或多自由度的機器裝置,具有一定的自動性,可依靠自身的動力能源和控制能力實現各種工業加工制造功能。
2023-05-23 11:41:061486 
我們以前在設計中使用 MC33879APEK,現在該組件已過時。
我們要求建議該組件的備選零件編號,該零件庫存充足,可用于生產。
2023-05-12 06:49:51
如何為汽車選擇合適的藍牙協議棧/RF模塊 藍牙堆棧,也稱為藍牙協議堆棧,是藍牙設備用來相互通信的軟件協議的集合。該堆棧由幾個層組成,每個層負責特定的功能。這些層協同工作,建立和維護兩個或多個藍牙設備
2023-05-09 09:38:57698 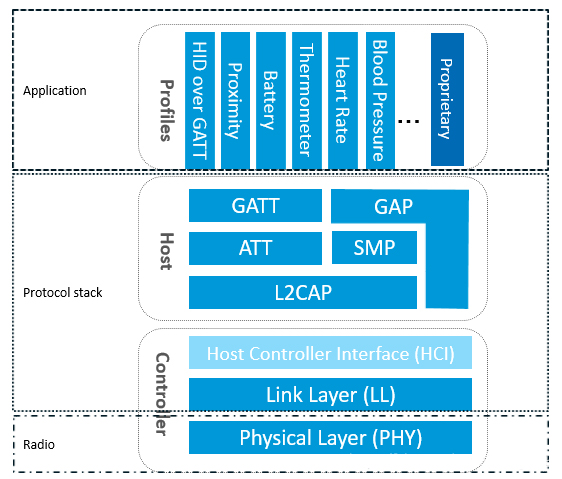
電纜和軟件也同樣屬于機器人的范疇。機械手是機器人機械系統主體。 它由眾多活動的、相互連接在一起的關節 (軸)組成。 我們也稱之為運動鏈。
2023-05-06 14:39:470 大家好,今天小阿暢為大家帶來的是三菱PLC控制機械手的一個實例,快來一起看看吧!
2023-04-20 10:04:403975 泰科關節機器人具備哪些優勢? 一、編程簡單可以讓無編程經驗的操作人員能快速設置和操作我們的直觀、3D 可視化協作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 15:03:00
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:43:30
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:39:15
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:29:30
TB6-R3協作機器人是一款靈活的小型工業協作機器人,其精巧的機械結構設計,外形緊湊,能夠適應狹小的工作空間,及高精密的工作任務需求;這款協作機器人自重僅為11.5KG,有效負載為3KG,工作半徑達666mm,是輕型裝配和高精度控制的理想選擇。
2023-04-19 10:18:50
深圳泰科智能機器人TB6-R3協作機器人是一款靈活的小型工業協作機器人,其精巧的機械結構設計,外形緊湊,能夠適應狹小的工作空間,及高精密的工作任務需求;這款協作機器人自重僅為11.5KG,有效負載為3KG,工作半徑達666mm,是輕型裝配和高精度控制的理想選擇。
2023-04-19 10:13:59
TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、航天、科研、教育等多個行業、多場景的自動化需求。
2023-04-19 09:38:36
TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作機器人功能強大、高自重負載比、高可靠性、模塊化關節設計,易于末端擴展外部設備,可以實現快速安裝部署。
2023-04-19 09:27:59
我正在尋找零件號“PCAL6408ABSHP”中有關工藝節點和晶體管數量的信息。NXP 網站上是否有一個位置可以找到 NXP 部件號的此類信息?
2023-04-19 09:27:44
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、科研、教育等多個行業、多場景的自動化需求。-
2023-04-19 09:22:29
TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產應用需求。模塊化
2023-04-19 09:16:32
模組組成的最小機器人自重僅15kg。安裝簡單RJS關節模組簡化了機器人的裝配流程,裝配過程不再有繁復的零件組裝和走線,一臺6軸機器人僅需要2-3小時便能快速完成。
2023-04-18 14:04:34
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:57:19
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 16:12:03
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:57:13
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:15:06
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:02:00
零件在托盤上的方向是否會導致質量問題?零件的定位孔是否一定要放在左下方向?MPN:MK70FX512VMJ15
2023-04-17 06:14:52
,這種可擴展性提供了大量選項。如何為您的應用選擇合適的器件?我們從一些基本的 MCU 功能開始。MSPM0L 和 MSPM0G 的主要區別在于 CPU 速度:? M0L 器件的最大頻率為 32MHz
2023-04-13 11:13:01
什么是機器人機械原點?機械原點在哪里?
A:機器人六個伺服電機都有一個唯一固定的機械原點,錯誤的設定機器人機械原點將會
2023-04-11 10:17:311075 語音交互無論是人與人溝通,還是AI人工智能時代人與機器人互動以及機器人與機器人之間的交互等都是最為基礎重要的一種方式。對于今天AI人工智能時代基本的平臺載體--機器人來說,人機語音交互必須首先具有
2023-04-03 11:33:18472 
機器人視覺抓取的目的是使用一個機械手模型(包括二指或多指夾爪,吸盤等),以RGB或RGBD相機采集的場景圖像為輸入計算出一個最優的抓取位姿,使機械手在該位姿下可以穩定地抓取模型已知或未知的物體。
2023-03-30 10:19:29472 我們在 MPR121QR2 零件上遇到了一些問題。X-ray處理后,我們看不到零件有die的形狀,但我們可以看到零件中的焊線。這是怎么回事?是正常狀態嗎?
2023-03-28 06:15:25
機器人的系統結構 一臺通用的工業機器人,按其功能劃分,一般由 3 個相互關連的部分組成:機械手總成、控制器、示教系統,如圖 1 所示。
2023-03-24 10:22:452361 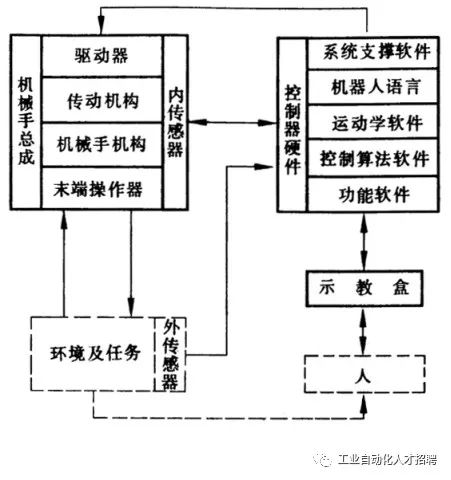
首先,最重要的源頭是評估導入的機器人,是用于怎樣的應用場合以及什么樣的制程。
若是應用制程需要在人工旁邊由機器協同完成,對于通常的人機混合的半自動線,特別是需要經常變換工位或移位移線的情況,以及配合新型力矩感應器的場合,協作型機器人(Cobots)應該是一個很好的選項。
2023-03-24 10:02:461324 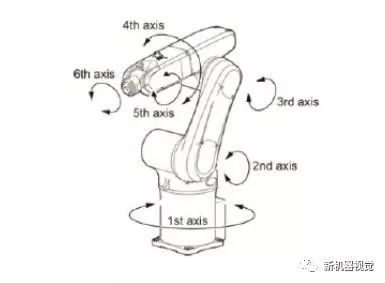
一般在租香港服務器的時候,有兩種系統可供選擇,Windows和Linux,這也是最常用的。但是有些朋友不知道怎么選擇,本文小編就和大家一起分析一下如何為香港服務器選擇合適的系統? Windows
2023-03-23 14:53:57290 拆包機械手
2023-03-23 11:11:28355 由于MC9S08DZ128CLH零件短缺問題,我的客戶想調查S9S08DZ128F2CLH是否可以更換零件而不需要修改布局和固件代碼,需要您的評論確認,謝謝!
2023-03-23 07:02:34
 電子發燒友App
電子發燒友App



















 工商網監
工商網監
評論