開始接觸STM32G474,用于對一個全橋電路實現閉環控制,里面包括PI控制,準PR控制,和一個相位環;在學習完輸出pwm和ADC-DMA兩個模塊后無法將兩者整合在一起,對于后續步驟更加沒有思路
2024-03-22 06:40:45
我查閱了部分變頻器廠商的說明書,在閉環編碼器反饋矢量控制時速度控制精度在0.02%,我想著能夠做出這么高的精度嗎?0.02%這么高的精度,以50HZ兩級對電機為例,同步轉速1500,如果是在閉環控制
2024-02-28 12:16:54
交流伺服電機是一種通過閉環反饋控制系統實現精確位置、速度和轉矩控制的電機。它在工業自動化、機械加工、機器人領域有著廣泛的應用。本文將詳細介紹交流伺服電機的工作原理和控制方式。 一、交流伺服電機
2024-02-18 14:59:25 268
268 伺服電機是一種專門設計用于精確控制位置、速度和加速度的電動機。它通常與伺服驅動器(也稱為伺服放大器或伺服控制器)一起使用,形成一個閉環控制系統。這種系統能夠提供高精度的運動控制,并且廣泛應用于機器人
2024-02-16 10:55:00478 在本Arduino伺服電機教程中,您將學習如何使用Arduino UNO板和電位器控制伺服電機。
2024-02-11 10:11:00352 
我想使用 MCE 對電機進行電壓開環控制,但我不知道如何操作。 我的是 PMSM 電機,有相關的例程嗎?
謝謝!
2024-01-25 07:29:26
非標項目中有非常多的運動控制,根據系統配置、電機類型以及精度需求的不同主要有三種控制方式:開環控制、半閉環控制、全閉環控制。
2024-01-23 09:48:46206 
伺服電缸通常采用閉環控制系統,通過反饋信號實時調整電機的轉速和位置,以達到精確的運動控制。而伺服壓機一般采用閉環或開環控制系統,通過控制液壓系統或壓力傳感器實時調整壓力或力量,以滿足加工需求。
2024-01-22 17:21:21313 電機逆變器通常配備各種反饋傳感器接口,如編碼器、傳感器等,用于實時監測電機的運行狀態和參數。通過反饋信號的獲取和處理,可以實現閉環控制,提高電機的控制精度和穩定性。此外,電機逆變器還提供多種保護功能,如過流保護、過載保護、過溫保護等,以確保電機和逆變器的安全運行。
2024-01-15 14:01:28265 伺服電機是一種特殊的電機,可以根據控制信號準確地控制角度、速度和位置。伺服電機的最簡單控制方法可以分為開環控制和閉環控制兩種。 開環控制:開環控制是指通過直接提供控制信號,使伺服電機旋轉到所設
2024-01-14 14:40:27571 低溫伺服電機和普通電機是兩種不同類型的電機,它們在工作原理、性能特點和應用范圍等方面存在一些區別。本文將對低溫伺服電機和普通電機的區別進行詳細介紹。 首先,我們需要了解低溫伺服電機和普通電機
2024-01-05 16:38:08209 伺服電機的三種控制方式 如何確定選擇伺服電機控制方式? 伺服電機是一種能夠根據輸入信號實時調整轉速和位置的電動機。它通常用于需要高精度、高效率、高可靠性的工業領域,如機床、機器人、印刷設備等。伺服
2023-12-26 14:02:19579 什么是伺服電機的原點設置?伺服電機零點和原點的區別 伺服電機的原點設置,簡單來說,就是確定電機的起始位置或參考位置。在使用伺服電機控制系統時,需要將電機的位置與設定的參考位置進行對齊,以確保精準
2023-12-25 13:57:591129 PLC(可編程邏輯控制器)是一種常用于工業自動化系統的控制器。伺服電機是一種具有高精度、高速度和高可靠性的電動機,可以用于實現精確控制和準確位置的要求。在PLC中,我們可以使用不同的方法來控制伺服
2023-12-25 11:16:30800 伺服電機控制方式有脈沖、模擬量和通訊這三種,在不同的應用場景下,我們該如何選擇伺服電機的控制方式呢?
2023-12-20 18:22:53894 
伺服電機(servo motor )是指在伺服系統中控制機械元件運轉的發動機,是一種補助馬達間接變速裝置。根據使用電源不同:分直流伺服電機和交流伺服電機。他兩在功能上的區別:交流伺服要好一些,因為
2023-12-20 16:37:35338 步進電機的控制方法以及所需的控制信號。 步進電機的控制方法主要分為開環控制和閉環控制兩種。 開環控制是指根據預定的電流和時間控制信號來驅動步進電機,根據電流和時間的確定性,可以較精確地控制電機的角度和速度。開
2023-12-20 11:21:24761 ? ? ? 變頻器是一種電力調節設備,它通過改變電機的工作頻率來調節電機的轉速。在實際應用中,變頻器通常采用三種控制方式:開環控制、閉環控制和矢量控制。這三種控制方式各有優缺點,下面將詳細介紹它們
2023-12-18 09:56:46410 
伺服電機是否必須有對應的伺服驅動器來控制?沒有伺服驅動器能使用伺服電機嗎?怎么控制?首次接觸,不懂
2023-12-15 07:49:19
三相逆變器電壓閉環控制仿真 一、引言 三相逆變器是電力電子技術中的重要組成部分,廣泛應用于新能源發電、電動汽車、工業自動化等領域。電壓閉環控制是逆變器控制策略中的一種常見方法,通過對輸出電壓進行實時
2023-12-14 11:16:26423 伺服電機(servo motor )是指在伺服系統中控制機械元件運轉的發動機,是一種補助馬達間接變速裝置。根據使用電源不同:分直流伺服電機和交流伺服電機。他兩在功能上的區別:交流伺服要好一些,因為
2023-12-11 17:14:52230 請問高手西門子MM440可以做矢量閉環控制碼?
(1)矢量控制算法看起來有點復雜,用的時候需要怎樣連接變頻器、電機與轉速傳感器?有幾個輸入量?
(2)矢量變頻+三相異步電動機的機械特性曲線 與 原來
2023-12-11 07:28:54
變頻電機和伺服電機的區別? 變頻電機和伺服電機是現代工業領域中常用的兩種電動機類型。雖然它們都可以實現電動機的運轉,但在設計原理、控制方式以及應用范圍等方面存在許多區別。本文將從這些方面進行詳盡
2023-12-08 10:47:38748 電子發燒友網報道(文/李寧遠)在談論電機的時候控制是繞不開的話題,大致上對控制來進行分類有開環控制和閉環控制兩種。開環控制的特點是系統的輸出量不會對系統的控制作用發生影響。閉環控制是將輸出量直接
2023-12-05 01:18:002131 
基于STM32F103的直流電機pid調節的閉環控制,主要模塊:NOKIA5110顯示屏紅外測速模塊
2023-11-27 16:50:22 3
3 DD馬達和伺服電機是兩種常見的電機類型,它們在許多方面都有所不同。下面將詳細介紹它們的區別。 一、定義和結構 DD馬達,全稱為DD馬達驅動器,是一種通過控制器來實現直流電機正反轉的設備。它主要由電機
2023-11-24 14:17:482549 電子發燒友網站提供《適用于電磁閥執行器的穩健閉環控制與監測系統.pdf》資料免費下載
2023-11-22 11:03:020 ,但是加上閉環控制系統就可以稱之為伺服系統中的電機。 伺服電機是在伺服系統中控制機械元件運轉的電動機,它搭配上驅動器,形成一個完整的伺服系統,就能夠精準地控制速度、位置等。伺服電機具有線性度高、起動轉矩大、運行范
2023-11-16 16:13:33284 要準確地定義伺服電機,我們首先需理解其核心特性:反饋與閉環控制。伺服電機憑借這些特性,能精確控制扭矩、速度或位置,即使在零速度下,也能保持足夠的扭矩以鎖定負載。
2023-11-10 10:46:39246 
伺服電機重要的應用是定位控制。位置控制有兩個需要控制的物理量,即速度和位置。準確地說,是控制伺服電機到達位置的速度和停止的速度。
2023-11-06 10:29:18331 步進電機開環控制和閉環控制的區別概述:步進電機是一種特殊的電機,與其他電機不同的是它能夠以固定步進角度旋轉,能夠控制其轉速和轉向。步進電機常用于控制精度要求較高的場合,如打印機、數碼相機等。而對
2023-10-28 08:07:461304 
開環電機是一種沒有反饋控制的電機,也稱為非閉環電機。其輸出轉速和位置由輸入控制信號決定,沒有位置或速度反饋回路來控制輸出。其特點是成本低、結構簡單、轉速波動大且誤差較大,適用于一些不要求精度和負載變化較小的應用場景。
2023-10-25 09:27:332009 步進電機開環控制與閉環控制有什么區別? 介紹步進電機開環控制和閉環控制的區別 概述: 步進電機是一種特殊的電機,與其他電機不同的是它能夠以固定步進角度旋轉,能夠控制其轉速和轉向。步進電機常用
2023-10-24 11:49:19821 通過總線控制伺服電機時,如何進行回零(尋參考點)控制?這里就CANOPEN伺服電機的回零控制方法分享給大家。
2023-10-23 11:42:201627 
電子發燒友網站提供《基于閉環控制晶閘管數字觸發電路設計.pdf》資料免費下載
2023-10-18 09:50:161 步進電機基本上以開環電路驅動,用于位置控制。換句話說,步進電機以外的電機尤其是高精度的步進電機之外并沒有做開環控制定位的,而用開環電路驅動的電機只有步進電機。例如無刷電機,首先為切換相,需要測出轉子
2023-09-24 08:08:441733 步進電機基本上以開環電路驅動,用于位置控制 。換句話說,步進電機以外的電機尤其是高精度的步進電機之外并沒有做開環控制定位的,而用開環電路驅動的電機只有步進電機。
2023-09-22 10:37:59679 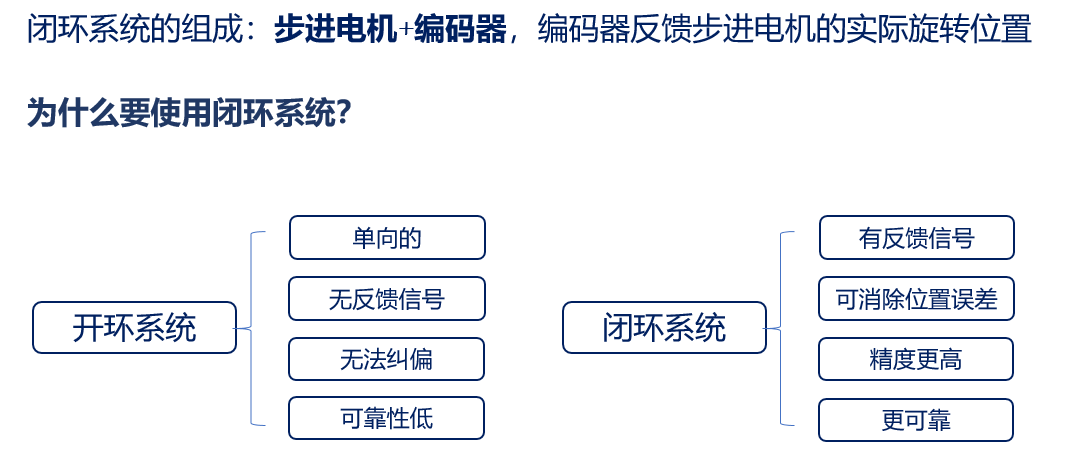
有密切的關系,步進電機控制系統從其控制方式來看,可以分為以下三類:開環控制系統、閉環控制系統、半閉環控制系統。半閉環控制系統在實際應用中一般歸類于開環或閉環系統中
2023-09-14 08:09:031312 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-09-08 11:22:48734 開環增益和閉環增益是控制系統理論中的兩個關鍵概念,用于描述系統在不同工作狀態下的增益特性。
2023-09-04 16:04:212442 
,不能達到期望值。為了解決這個問題,首先對火力發電機組一次調頻動作過程進行分析,得到現有控制系統存在的問題;然后通過對開環和閉環控制的研究,尋找控制系統的優化方向,即閉環+開環復合控制,同時為保證
2023-08-29 14:32:48594 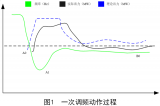
伺服電機包括一個電機、一個編碼器和一個控制器組成。編碼器給出反饋信號,控制器接收反饋信號并控制電機轉速、方向和位置。控制器可以直接編程,以便更好更精確地控制電機。
2023-08-26 11:13:282731 伺服電機是一種常用于控制精度要求較高的機械設備的電機。它通過精密的控制裝置來保持輸出轉矩或轉速的穩定性,實現高精度的運動控制。伺服電機內部包含了控制器、編碼器、功率放大器和電機等幾個主要組成部分,它們協同工作來實現控制。
2023-08-26 11:11:272497 ▲步進電機結構圖▲伺服電機結構圖下文簡單敘述它們的差異:1、工作原理這兩種電機在原理上有很大的不同,步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件,
2023-08-22 08:08:474055 步進電機伺服系統是典型的開環控制系統,指令信號是單向流動的。開環系統沒有位置和速度反饋回路,省去了檢測裝置,其精度主要由步進電機來決定,速度也受到步進電機性能的限制,系統簡單可靠,不需要像閉環伺服系統那樣進行復雜的設計計算與試驗驗證。
2023-08-19 11:04:08439 
“伺服”表示電機在閉環控制系統中運行,該系統使用來自編碼器或旋轉變壓器(通常集成到電機或安裝在電機上)的反饋來比較電機的實際位置、速度或扭矩與指令的差距,進而實現精確運動,屬于機器人核心技術之一。
2023-08-11 11:40:38371 
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-08-09 09:25:28599 相對于開環控制而言,閉環控是指控制論的一個基本概念。指作為被控的輸出以一定方式返回到作為控制的輸入端,并對輸入端施加控制影響的一種控制關系。在控制論中,閉環通常指輸出端通過“旁鏈”方式回饋到輸入
2023-08-08 11:17:31380 選擇防爆電機類型,是根據具體應用需求和系統要求而定。以下是防爆伺服電機和防爆步進電機的一些特點和比較,以幫助您做出選擇。防爆伺服電機優點:高精度和高動態響應:伺服電機具有閉環控制系統,可以實現更精
2023-07-31 22:29:06384 伺服電機速度控制和轉矩控制都是用模擬量來控制,位置控制是通過發脈沖來控制。具體采用什么控制方式要根據客戶的要求以及滿足何種運動功能來選擇。
2023-07-28 14:36:19574 
伺服電機控制方式有脈沖、模擬量和通訊控制這三種,在不同的應用場景下,該如何確定選擇伺服電機控制方式?
2023-07-26 09:22:20977 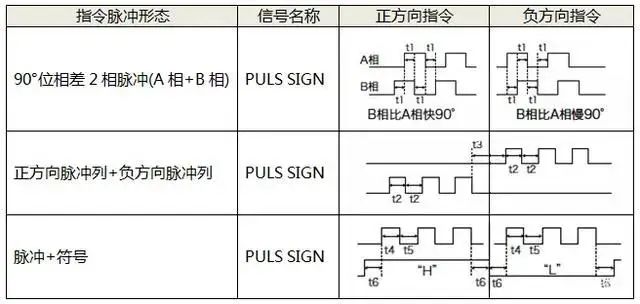
高精度和高動態響應:伺服電機具有閉環控制系統,可以實現更精確的位置和速度控制,并具備較高的動態響應能力。
2023-07-24 14:23:02115 伺服的控制術語有很多:閉環控制、半閉環控制、開環控制,速度環、電流環、位置環,很多朋友相信沒有弄清楚,今天就為大家詳細解答一下,伺服的控制模式是怎樣的,該怎樣系統的掌握這一塊。
2023-07-23 09:34:04706 
無刷直流電機的有位置傳感器控制很多,但是無霍爾閉環控制在Simulink中很少見,通過對Simulink模型的認識,您將對無霍爾控制理解更加深刻
2023-07-13 09:45:05634 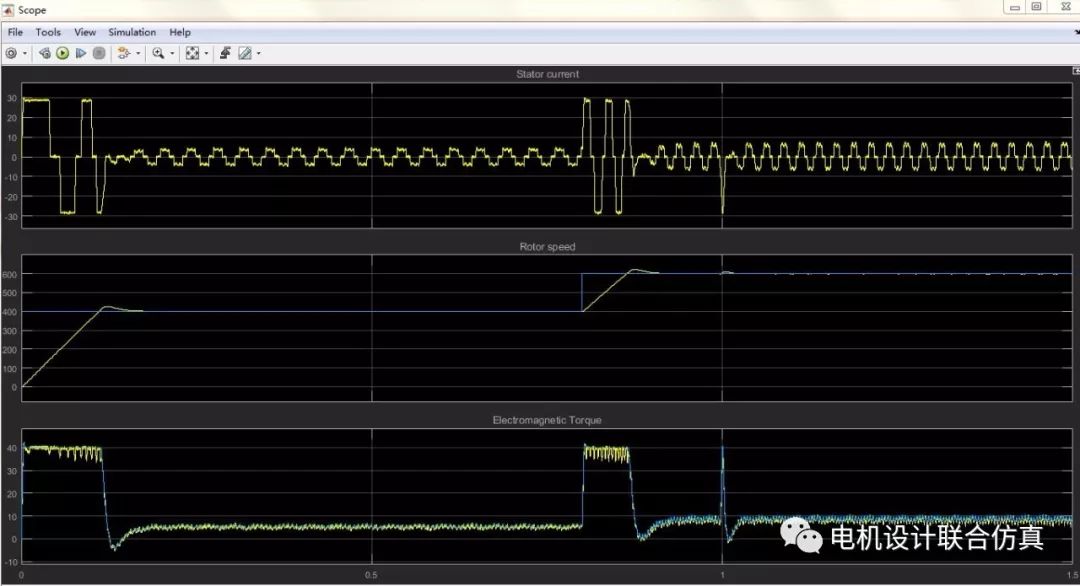
伺服電機是我們常用的一種電機,在本文的案例中,將學習如何使用單片機控制伺服電機,案例以PIC16F877A單片機作為接口的連接與控制示例。
2023-07-06 10:53:142779 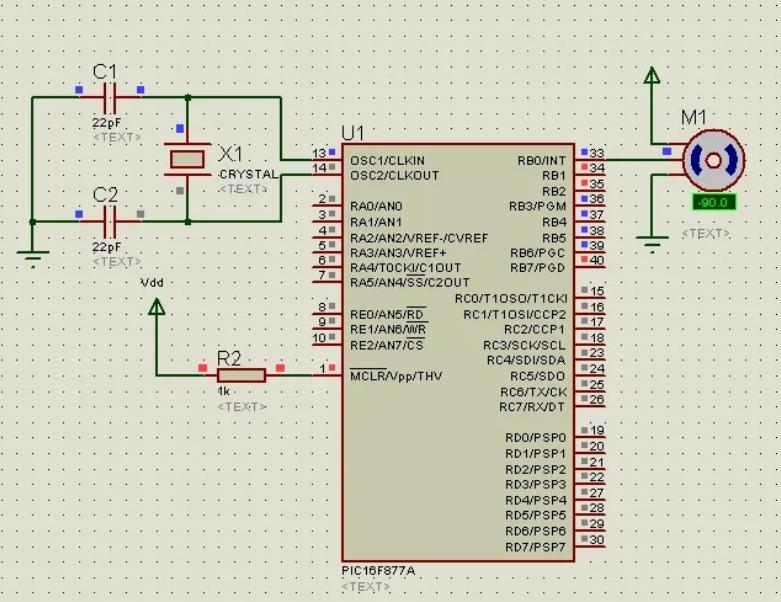
電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。那么關于伺服電機有哪些需要知道的呢?
2023-06-26 10:13:17325 步進電機,舵機,伺服電機的區別?
2023-06-19 11:50:02
伺服電機是一種可以精確控制角度方向的電子設備。當涉及到以精確角度移動或旋轉物體時,伺服電機是此類應用的最佳選擇。它由一個簡單的直流電機和位置反饋系統組成,用于確定電機位置。我們將使用可以360o旋轉
2023-06-18 09:58:21406 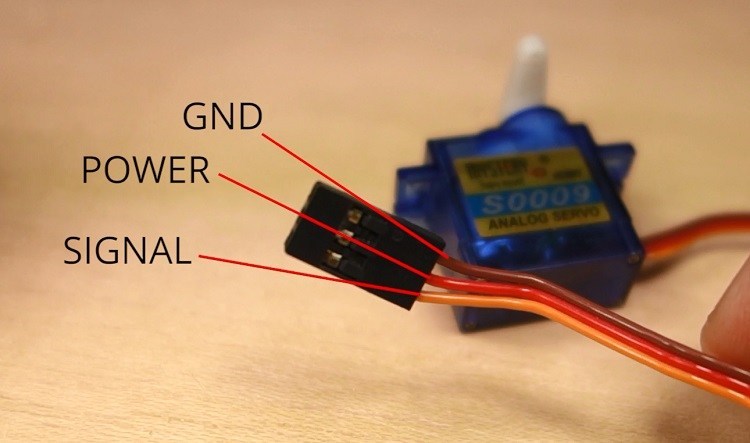
,同時電機自帶的編碼器反饋信號給驅動器,驅動器根據反饋值與目標值進行比較,調整轉子轉動的角度。伺服電機的精度決定于編碼器的精度(線數)也就是說伺服電機本身具備發出脈沖的功能,它每旋轉一個角度,都會發出對應數量的脈沖,這樣伺服驅動器和伺服電機編碼器的脈沖形成了呼應,所以它是閉環控制,步進電機是開環控制。
2023-06-13 11:18:391338 信號來控制電機的轉動角度和速度。 步進伺服是一種基于步進電機的改進型產品,其工作原理是在步進電機上增加了閉環控制系統,以實現更高的精度和穩定性。步進伺服可以通過反饋控制器獲取電機的實際位置和速度信息,并與設
2023-06-13 08:30:02492 電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。那么關于伺服電機
2023-06-08 09:50:21641 ,用簡單的硬件電路就可以,但是無法做到穩定、高速、精確。如果在要求不高的場合,這些簡單的硬件控制也是可行的,但到了工業控制、機器人以及其他更精細的場合中,顯然需要對電機的速度、電流、位置進行高精度的閉環控制了。但問題又來了
2023-06-07 20:45:02399 
相對于開環控制而言,閉環控制是控制論的一個基本概念。指作為被控的輸出以一定方式返回到作為控制的輸入端,并對輸入端施加控制影響的一種控制關系。在控制論中,閉環通常指輸出端通過“旁鏈”方式回饋到輸入
2023-06-06 10:41:04561 工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。1.如何正確
2023-05-31 09:35:29316 伺服電機速度控制和轉矩控制都是用模擬量來控制,位置控制是通過發脈沖來控制。
2023-05-24 09:44:00635 
工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。
2023-05-22 10:28:48214 PID控制器是應用最廣泛的閉環控制器,它根據給定值與被控實測值之間的偏差;按照PID算法計算出控制器的輸出量,控制執行機構進行調節,使被控量跟隨給定量變化,并使系統達到穩定。
2023-05-17 13:03:063890 
伺服電機控制方式有脈沖、模擬量和通訊這三種,在不同的應用場景下,我們該如何選擇伺服電機的控制方式呢?
2023-05-16 15:56:152476 
伺服系統指經由閉環控制方式達到對一個機械系統的位置、速度和加速度的控制。
一個伺服系統的構成包括被控對象、執行器和控制器(負載、伺服電動機和功率放大器、控制器和反饋裝置)。
1. 執行器的功能
2023-05-16 14:46:430 控制器控制伺服電機通常采用兩種指令方式:數字脈沖和模擬信號。數字脈沖這種方式與步進電機的控制方式類似,運動控制器給伺服驅動器發送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號;伺服驅動器工作在位
2023-05-09 14:43:031009 電機PID控制和閉環控制 1 PID控制 1.1 位置式PID 理論公式: PID中,P用于提高響應速度,I用于減小靜差、D用于抑制震蕩。一般在進行PID參數整定時,首先設I和D的值為0,然后
2023-05-06 11:48:082 通常由電機控制器、電機驅動、電機本體(多為伺服電機)組成。電機控制器具備智能運算功能,并可傳送指令以驅動電機。驅動可提供增壓電流,根據控制器指令以驅動電機。電機可以直接移動機器人, 也可通過傳動系統
2023-05-06 11:06:371 目錄. 一. 緒論 二. 電機速度環PID原理 三. STM32使用CAN總線實現大疆M3508電機的速度閉環控制 四. UCOS-III電機控制任務的實現
本文接上一篇STM32實現四驅小車
2023-05-06 10:28:266 伺服電機是一個閉環系統,它使用位置反饋來控制其運動和最終位置。伺服電機有多種類型,其主要特點是能夠精確控制其軸的位置。在工業型伺服電機中,位置反饋傳感器通常是高精度編碼器,而在較小的 RC 或業余
2023-05-06 10:08:212 伺服控制單元,即,經由閉環控制方式達到一個機械系統的位置,扭矩,速度或加速度的控制,是自動控制系統中的執行單元,是把上位控制
器的電信號轉換成電動機軸上的角位移或角速度輸出。
1. 控制器:動作
2023-05-06 09:34:343 變頻器控制電機的方式主要分為VF控制模式、開環矢量控制模式(SVC)、閉環矢量控制(VC)以及直接轉矩控制(DTC)等幾種模式。 1 V/F控制 V/F控制是永磁同步電機最簡單的一種控制方法,易于
2023-05-05 14:59:400 PWM/轉速單閉環/轉速電流雙閉環電機控制Simulink仿真 實驗室之前一直在用BBB板和ARM板通過驅動器控制電機,最近實驗室新買了一臺DSPACE平臺,具有運行參數可視化、實時性高等特點
2023-05-05 14:30:480 驅動器有如下幾個端口:X1、X2、X3、X4、X5、X6、XA、XBX1 X2 X3 X4 X5 X6伺服電機的四種控制模式:1.位置控制模式 2.速度控制模式 3.轉矩控制模式4.全閉環控制模式 PR
2023-05-05 11:36:140 項目目標
實現電機最常使用的兩個功能,轉速控制和位置控制 使用PID閉環控制(控制線性系統最簡單快捷的控制方法)
硬件搭建
為了實現控制電機轉動和閉環控制 需要: 1. 電機(廢話) 2. 編碼器(霍爾編碼器或者光電編碼器均可) 3. 電機驅動(這里選的是l298n模塊)
2023-05-05 11:29:193 機電設備中有的地方用的伺服電機。有的地方用的是步進電機,價格是相差很遠的。
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件,在非超載的情況下,電機的轉速、停止的位置只取決于
2023-05-04 15:32:06894 
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的伺服控制,其實就是對伺服電機的位置控制。 其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-04-27 17:34:351113 
交流伺服電機的性能要好一些,因為交流伺服是正弦波控制,轉矩脈動小;而無刷直流伺服是梯形波控制。但無刷直流伺服實現控制比較簡單,便宜。
2023-04-26 10:27:00832 伺服電機是一種可控的精密電機,通過使用反饋控制系統來實現對位置、速度和加速度等參數的高精度控制。伺服電機常用于需要精密運動控制的應用場合,比如機床、印刷設備、自動化設計和工業自動化等領域,具有運動平穩性、定位精度、速度控制和重復性等方面的高性能。
2023-03-31 18:22:377454 根據Matlab里對直流電機模型的介紹,搭建了直流電機的電壓環路單閉環控制模型和電壓環電流環雙閉環的控制模型,并進行了仿真對比,前面介紹部分是對SIMULINK里模型的翻譯,可進行參考,內容
均以4K圖片整理
2023-03-31 11:22:417 PLC步進電機指令可以控制伺服電機么? 也就是步進電機指令和伺服電機指令有區別嗎?
2023-03-30 17:34:11
PLC步進電機指令可以控制伺服電機么? 也就是步進電機指令和伺服電機指令有區別嗎?
2023-03-30 17:34:10
PLC的PID控制怎么實現閉環控制?在程序中采用PID調節指令就可以了嗎,是不是伺服電機走長了,可用PID調整那這輸入誤差怎么得到?比如說輸出與輸入誤差積分成正比,是不是如果有誤差,PLC就會算出這個值,然后在輸出值上面加上去或減掉???
2023-03-30 17:18:02
1.直流電機開環控制 在前面幾章節的基礎上,已經能夠通過光電編碼器測量電機的旋轉速度,也能夠通過STM32的定時器給出相應的PWM信號,這里就直接實踐,我們打開keil工程,在《直流電機開發
2023-03-30 11:14:150 、按鍵控制模塊、電機驅動模塊、測速環節和直流電機組成,其中電機驅動模塊采用L298N芯片實現,液晶顯示模塊采
用LCD1602實現,穩壓電路模塊采用7805芯片實現。采用模糊控制(FuzzyControl)算法對直流電機轉速進行閉環控制。
通過調試,實現了串口通信設置目標轉速、手
2023-03-30 10:50:300 ,對異步電機在轉子磁場定向下的狀態方程模型進行了推導,并基于狀態方程模型討論了三閉環控制算法的實現,以及MTPA與MTPV的實現方法。然后對開環的磁鏈估計器與閉環的磁鏈觀測器進行了討論。 為了實現異
2023-03-29 11:40:502 矢量變頻器是一種常用的電機控制器,可通過閉環控制實現對電機轉矩、轉速等運動參數的精確控制。其閉環控制方法一般分為速度環和電流環兩種。
2023-03-28 16:12:533216 伺服電機配合伺服控制器精確控制電機軸的角位置、速度和加速度。這是通過帶有解析器(與控制器的模擬通信)或絕對或增量編碼器(與控制器的數字通信)的閉環反饋系統來實現的,它提供軸的位置信息和速度。
2023-03-25 17:16:441787 設計一個開環步進電機控制系統。使得步進電機能夠正常運轉。并能實現啟停、正反轉、調速控制。以及顯示速度。
設計要求如下: ①硬件測試通過。接線完成。三個芯片分別測試通過。步進電機能夠正常運轉
2023-03-23 10:56:581
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論