我查閱了部分變頻器廠商的說明書,在閉環編碼器反饋矢量控制時速度控制精度在0.02%,我想著能夠做出這么高的精度嗎?0.02%這么高的精度,以50HZ兩級對電機為例,同步轉速1500,如果是在閉環控制
2024-02-28 12:16:54
特性,可把所收到的電信號轉換成電動機軸上的角位移或角速度輸出。按控制方式可分為:脈沖型和總線型。 一、伺服電機脈沖方式 伺服電機脈沖方式是通過控制器向驅動器發送脈沖信號控制電機運動,由于每一次脈沖的頻率和寬度
2024-02-25 11:53:15 514
514 所需的電機轉矩。轉矩可以通過設定給定的轉矩值或設定所需的速度,進而轉換為轉矩需求。 2. 轉矩控制回路:在變頻器中,選擇合適的控制方式和參數,設置轉矩控制回路。這通常涉及設置合適的閉環轉矩控制參數,如比例增益、積分時間
2024-02-21 17:53:35451 伺服電機是一種專門設計用于精確控制位置、速度和加速度的電動機。它通常與伺服驅動器(也稱為伺服放大器或伺服控制器)一起使用,形成一個閉環控制系統。這種系統能夠提供高精度的運動控制,并且廣泛應用于機器人
2024-02-16 10:55:00478 風扇速度控制器是一種電子設備,用于調節風扇的轉速。通過改變輸入電壓或電流,風扇速度控制器可以控制風扇電動機的功率,從而調節風扇的轉速。
2024-02-12 10:57:00373 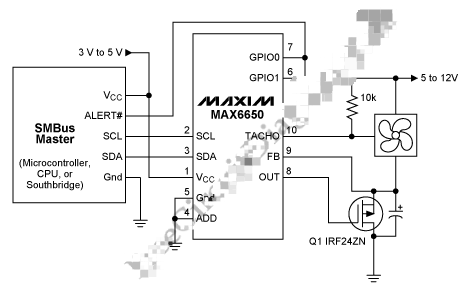
伺服電機是一種通過反饋機制實現精確位置和速度控制的電機。伺服電機通常由電機、控制器和編碼器等組成。控制器接收來自編碼器的反饋信號,并根據指令信號調節電機的速度和位置。伺服電機廣泛應用于需要高精度定位
2024-02-04 10:10:45247
遙控:支持HotRC SBUS接收機遙控
功能:雙輪速度同步閉環,角速度閉環,支持坡道駐車,比較好的走直線功能!
雙輪FOC控制器(小功率)
電壓:DC18-32V
電流:15A*2
控制接口
2024-01-30 18:15:20
伺服電缸通常采用閉環控制系統,通過反饋信號實時調整電機的轉速和位置,以達到精確的運動控制。而伺服壓機一般采用閉環或開環控制系統,通過控制液壓系統或壓力傳感器實時調整壓力或力量,以滿足加工需求。
2024-01-22 17:21:21313 伺服脈沖控制方式通過高速脈沖信號對伺服電機進行精確控制,能夠實現高精度的定位和速度調節,提高生產效率和產品質量。
2024-01-22 09:34:53164 請問一下,開環加速度是怎么回事?比如我的最高轉速是 2000rpm,開環加速度是 50rpm/s,
那最后生成的TXT的OpenLoopram是怎么回事計算機出來的呢?
2024-01-18 09:22:56
伺服電機是一種特殊的電機,可以根據控制信號準確地控制角度、速度和位置。伺服電機的最簡單控制方法可以分為開環控制和閉環控制兩種。 開環控制:開環控制是指通過直接提供控制信號,使伺服電機旋轉到所設
2024-01-14 14:40:27571 開環、閉環電流電壓傳感器使用注意事項? 開環和閉環電流電壓傳感器是現代電子設備中常見的測量和控制元件。開環傳感器的輸出信號直接與輸入信號有一個簡單的線性關系,而閉環傳感器則通過反饋機制來調節輸出信號
2024-01-03 15:47:32145 伺服電機速度增益過大會導致控制系統不穩定,出現過沖或者振蕩現象;伺服電機速度增益過小會導致控制系統響應遲鈍,無法快速調整速度。因此,需要通過試驗和調整來確定合適的速度增益,以保證控制系統的穩定性。
2024-01-03 09:20:15183 伺服電機速度增益的作用? 伺服電機速度增益是伺服控制系統中的一個重要參數,它對于電機的運行速度和穩定性起著關鍵作用。本文將詳盡、詳實、細致地介紹伺服電機速度增益的作用。 一、伺服電機的基本原理 伺服
2023-12-25 13:57:55555 伺服控制器是一種用于精確控制電機運動的電子設備,通過接收來自控制系統的指令以及監測電機的位置、速度等參數,實現對電機的精確控制。基于高精度、高速度、高可靠性等優點,在制造業、航空航天、醫療設備等領域
2023-12-14 18:15:01185 
一般伺服驅動器速度環增益與位置環增益是空載時候大,還是帶負載時候大些?謝謝
2023-12-12 07:29:18
為什么用PLC控制伺服控制器一給使能電機就轉(此時PLC還沒運行呢),控制器和電機都已經測試好了
2023-12-11 07:00:33
變頻電機和伺服電機的區別? 變頻電機和伺服電機是現代工業領域中常用的兩種電動機類型。雖然它們都可以實現電動機的運轉,但在設計原理、控制方式以及應用范圍等方面存在許多區別。本文將從這些方面進行詳盡
2023-12-08 10:47:38748 或間接反饋到輸入端形成閉環進而參與控制的控制方式。 ? 以往將變頻電壓施加于逆變器采用脈沖寬度調制的電機,可以很輕松地實現對電機的開環速度控制。在很多較低性能應用中,許多電機驅動器都采用開環速度控制,這不需要編碼
2023-12-05 01:18:002131 
運算放大器怎樣區分開環和閉環? 運算放大器是一種電子電路,用于放大輸入電壓或電流的大小。在放大的過程中,可以存在兩種工作模式:開環和閉環。 開環模式下,放大器的輸出與輸入之間沒有反饋,即輸出信號不會
2023-11-22 16:17:532048 工作在開環狀態更追求速度。
對于頻率比較低的情況放大器完全可以代替比較器(要主意輸出電平),反過來比較器大部分情況不能當作放大器使用。
因為比較器為了提高速度進行優化,這種優化卻減小了閉環穩定
2023-11-21 07:24:06
指令機構發脈沖或者給速度,用于配合驅動器正常工作。伺服電機可以將電壓信號轉化為轉矩和轉速,按照位置、力矩或速度指令精確地控制機械系統運動,內嵌的編碼器將伺服電機的運動參數反饋給伺服驅動器,完成閉環控制。
2023-11-20 18:17:56584 
伺服電機更換編碼器后速度太快
2023-11-17 07:48:42
要準確地定義伺服電機,我們首先需理解其核心特性:反饋與閉環控制。伺服電機憑借這些特性,能精確控制扭矩、速度或位置,即使在零速度下,也能保持足夠的扭矩以鎖定負載。
2023-11-10 10:46:39246 
:根據任務需求或控制要求,設定期望的關節速度。 2.速度控制器設計:設計一個速度控制器,該控制器接收期望速度和實際速度之間的誤差作為輸入,并產生相應的控制信號。常用的速度控制器包括比例-積分(PI)控制器或者更復雜
2023-11-09 17:22:27199 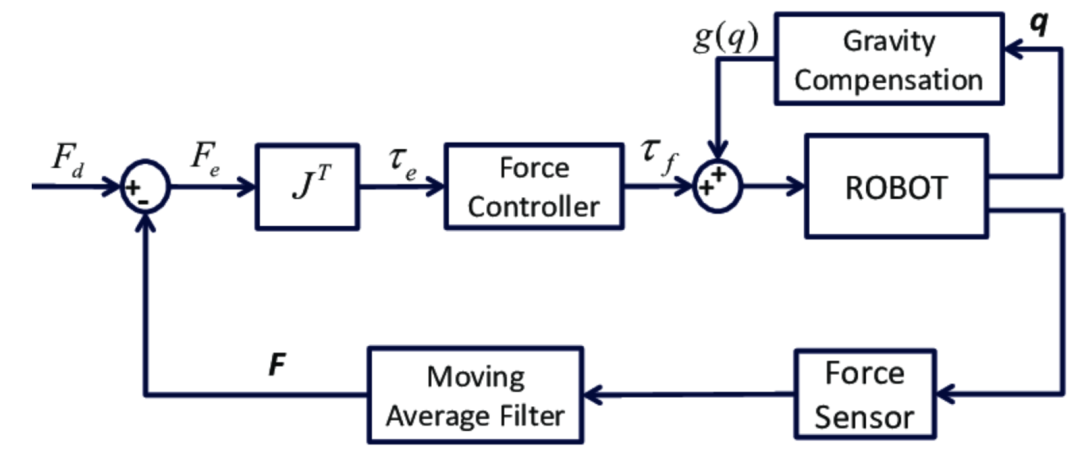
我有一個s120雙電機模塊(6SL3120-2TE13-0AA4)帶伺服電機(1FL6064-1AC61-0AA1),用伺服控制。原來運行正常,后面有報編碼器異常,把帶編碼器速度控制改為無編碼器速度
2023-11-09 07:32:05
本篇文章將介紹如何使用FPGA實現一個直流有刷電機控制器,主要包括 速度控制 和 角度控制(好像在無刷電機控制中,習慣將其稱為環,即速度環 和 角度環(位置環))。因此這是一個閉環系統,需要得到系統的反饋,實時得到電機的轉速和角度,所以需要上篇中編碼器模塊的輸出,作為控制器的反饋,通過PID進行調節。
2023-11-08 09:30:42342 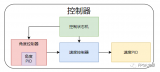
電機與電池容量、控制器、速度有什么關系? 電機、電池容量、控制器和車輛速度之間存在密切的關系。在現代電動車輛中,這些組件的選擇和匹配是至關重要的,它們影響著車輛的性能、續航里程和駕駛體驗。下面
2023-11-06 11:19:27571 伺服電機重要的應用是定位控制。位置控制有兩個需要控制的物理量,即速度和位置。準確地說,是控制伺服電機到達位置的速度和停止的速度。
2023-11-06 10:29:18331 電子發燒友網站提供《閥門電動裝置智能速度控制器研究與仿真.pdf》資料免費下載
2023-11-03 09:35:48 0
0 工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。
2023-11-01 15:22:07260 工業機器人有4大組成部分,分別為本體、伺服、減速器和控制器。而其中,工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。
2023-11-01 09:32:28485 
步進電機開環控制和閉環控制的區別概述:步進電機是一種特殊的電機,與其他電機不同的是它能夠以固定步進角度旋轉,能夠控制其轉速和轉向。步進電機常用于控制精度要求較高的場合,如打印機、數碼相機等。而對
2023-10-28 08:07:461305 
請問電流環與速度環的區別
2023-10-27 08:03:02
單片機IO配置不同速度有啥區別?
2023-10-25 16:42:53246 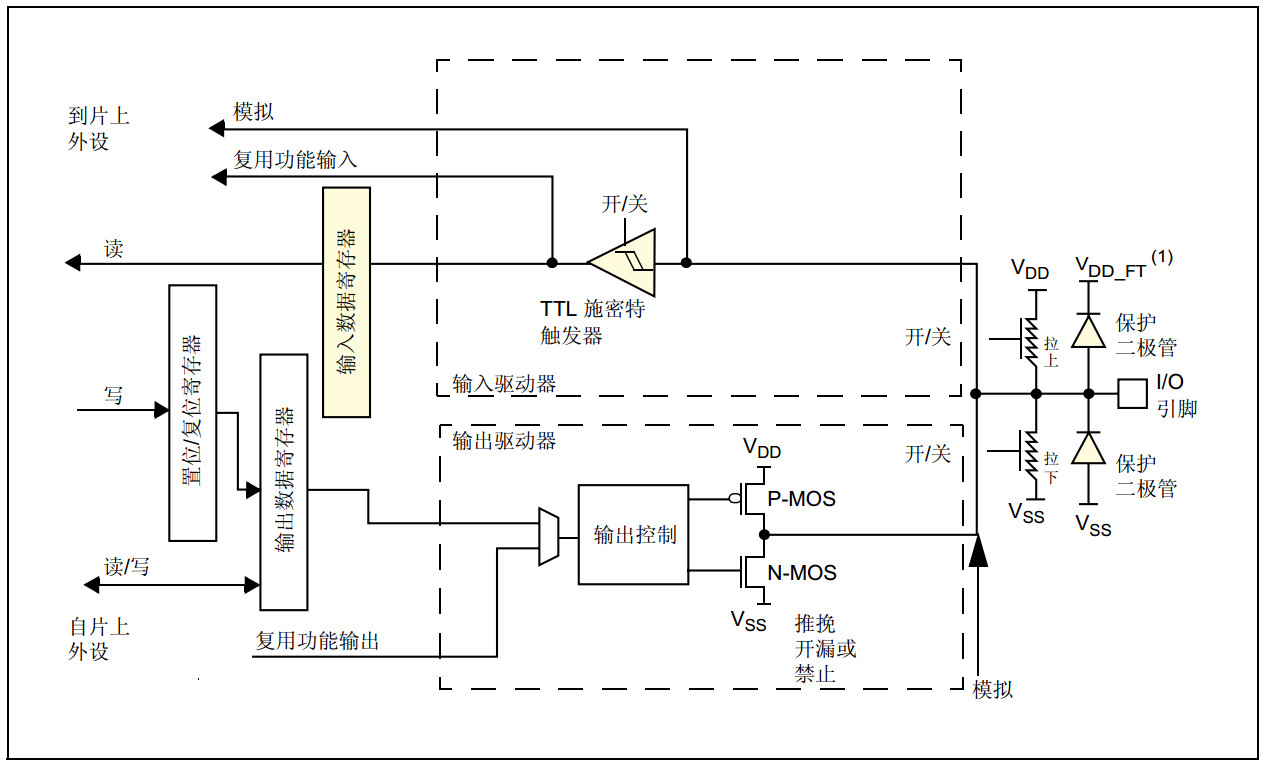
開環電機是一種沒有反饋控制的電機,也稱為非閉環電機。其輸出轉速和位置由輸入控制信號決定,沒有位置或速度反饋回路來控制輸出。其特點是成本低、結構簡單、轉速波動大且誤差較大,適用于一些不要求精度和負載變化較小的應用場景。
2023-10-25 09:27:332009 步進電機開環控制與閉環控制有什么區別? 介紹步進電機開環控制和閉環控制的區別 概述: 步進電機是一種特殊的電機,與其他電機不同的是它能夠以固定步進角度旋轉,能夠控制其轉速和轉向。步進電機常用
2023-10-24 11:49:19821 通常情況下,伺服系統由電流環、速度環以及位置環組成,3個閉環是由內到外互相包容的。也是就說,速度環包含電流環,而位置環又包含速度環。在極少數場合中,還會遇到只有位置環與電流環的情況,不過只是在特殊應用中。典型的三環控制回路如下圖所示。
2023-10-08 11:13:11822 
伺服系統是以位置和角度為控制量的控制系統的總稱,與位置和角度相關聯的速度、角速度、加速度、力等為控制量的系統也包含在伺服系統內。
2023-09-29 10:54:00197 
位置,需要含位置傳感器的位置閉環電路。而且如果按一定速度驅動,需測出轉子的速度,此為速度閉環電路;如果想定位控制,需要含有轉子位置信號的編碼器等傳感器的閉環電路,
2023-09-24 08:08:441733 單片機GPIO配置不同輸出速度有何區別?
2023-09-18 15:43:441207 
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-09-08 11:22:48734 開環增益和閉環增益是控制系統理論中的兩個關鍵概念,用于描述系統在不同工作狀態下的增益特性。
2023-09-04 16:04:212442 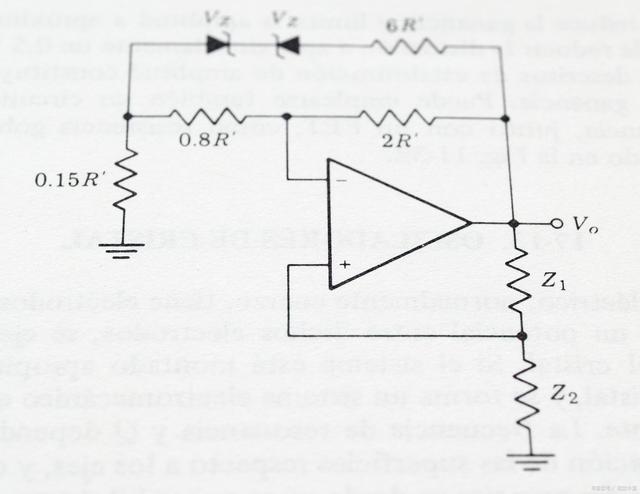
膨脹閥工作時,可以應用伺服電機的以下幾種運動模式: (1)位置控制:通過伺服電機的位置控制功能,可以精確地控制膨脹閥的開度。根據系統需求,可以設定目標位置,并使用閉環反饋控制來實現準確的位置控制
2023-08-25 08:35:01218 
步進電機伺服系統是典型的開環控制系統,指令信號是單向流動的。開環系統沒有位置和速度反饋回路,省去了檢測裝置,其精度主要由步進電機來決定,速度也受到步進電機性能的限制,系統簡單可靠,不需要像閉環伺服系統那樣進行復雜的設計計算與試驗驗證。
2023-08-19 11:04:08439 
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-08-09 09:25:28599 伺服電機是一個旋轉致動器或線性致動器,其允許角速度或線的位置,速度和加速度的精確控制。它包括一個與傳感器相連的合適的電動機,用于位置反饋。它還需要相對復雜的控制器,通常是專門設計用于伺服電機的專用
2023-08-05 08:10:07318 選擇防爆電機類型,是根據具體應用需求和系統要求而定。以下是防爆伺服電機和防爆步進電機的一些特點和比較,以幫助您做出選擇。防爆伺服電機優點:高精度和高動態響應:伺服電機具有閉環控制系統,可以實現更精
2023-07-31 22:29:06384 最近在用松下伺服電機。它的自整定效果真的不錯。只需要輸入剛性,就可以自己整定參數了。包括負載慣量。
我自己也做電機控制器之類的東西。但是僅限于電流環速度環位置環仨pid就完事了。不太理解慣量這個參數
2023-07-31 15:39:42
這種基于三端雙向可控硅的220V交流電機速度控制器電路設計用于控制鉆機等小型家用電機的速度。電機的速度可以通過改變P1的設置來控制。P1的設置決定了觸發三端雙向可控硅的觸發脈沖的相位。該電路采用自穩定技術,即使在負載時也能保持電機的速度。
2023-07-28 09:43:141937 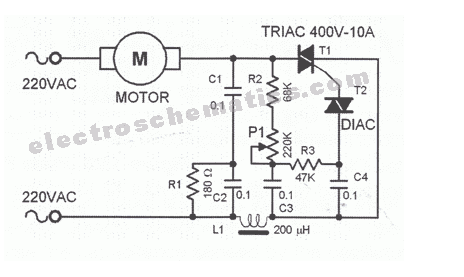
。伺服驅動器的設計中要確保電流環具備良好的閉環刷新性能,提高伺服響應特性,一般伺服系統允許用戶對位置環、速度環的增益等參數進行調整。
2023-07-26 12:00:00385 
高精度和高動態響應:伺服電機具有閉環控制系統,可以實現更精確的位置和速度控制,并具備較高的動態響應能力。
2023-07-24 14:23:02115 該電機速度控制器使用單個ICLM1014來控制直流電機的速度。當電機的旋轉因負載而減慢時,它會感測電機電流的增加。然后,IC增加電機電壓,以恢復原始速度。P1電位器改變電機的速度。
2023-07-23 11:10:111080 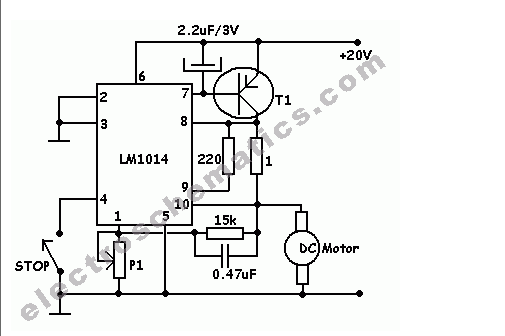
伺服的控制術語有很多:閉環控制、半閉環控制、開環控制,速度環、電流環、位置環,很多朋友相信沒有弄清楚,今天就為大家詳細解答一下,伺服的控制模式是怎樣的,該怎樣系統的掌握這一塊。
2023-07-23 09:34:04706 
在自動化領域,運動控制器和基本的伺服驅動器之間存在著微妙的差異。許多應用都需要運動控制器和伺服驅動器共同組成一個完整的系統,因此,掌握每個設備的功能和智能水平至關重要。 ? 伺服系統 伺服驅動器
2023-07-10 10:02:25982 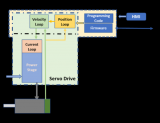
電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。那么關于伺服電機有哪些需要知道的呢?
2023-06-26 10:13:17325 電子發燒友網站提供《基于Arduino通用交流電機速度控制器.zip》資料免費下載
2023-06-25 11:28:040 運動控制器的工作原理是將預定的控制方案、規劃指令轉變成期望的機械運動,實現機械運動精確的位置(點位、運動軌跡、插補等)控制、速度控制、加速度控制、轉矩或力的控制。
2023-06-25 10:44:542154 
在研究運放形成的反饋系統時,相位裕度是衡量穩定性的一個重要指標。因此,明確相位裕度與運放的開環,環路,閉環響應的關系是一個重要的問題,有助于我們更好地在穩定性,功耗,速度之間進行折衷考慮。
2023-06-18 15:21:543403 
信號,我們可以高精度地調整旋轉角度和速度。該數據信號通常是PWM(脈寬調制)信號。通常我們使用微控制器來生成PWM信號或控制伺服系統,但我們會嘗試不同的方法。
2023-06-16 17:31:41408 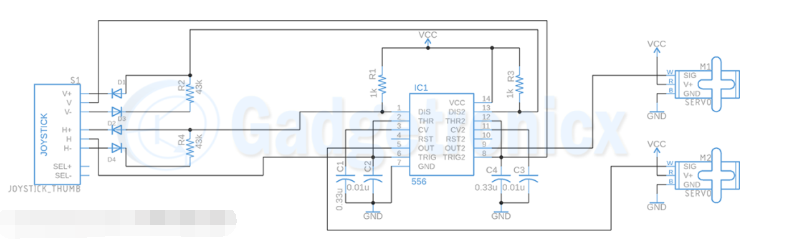
本應用筆記描述了當使用具有模塊化算術加速器(MAA)的MAXQ微控制器時,如何將模運算速度提高50%以上。
2023-06-16 11:45:47417 ,同時電機自帶的編碼器反饋信號給驅動器,驅動器根據反饋值與目標值進行比較,調整轉子轉動的角度。伺服電機的精度決定于編碼器的精度(線數)也就是說伺服電機本身具備發出脈沖的功能,它每旋轉一個角度,都會發出對應數量的脈沖,這樣伺服驅動器和伺服電機編碼器的脈沖形成了呼應,所以它是閉環控制,步進電機是開環控制。
2023-06-13 11:18:391338 信號來控制電機的轉動角度和速度。 步進伺服是一種基于步進電機的改進型產品,其工作原理是在步進電機上增加了閉環控制系統,以實現更高的精度和穩定性。步進伺服可以通過反饋控制器獲取電機的實際位置和速度信息,并與設
2023-06-13 08:30:02492 工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。1.如何正確
2023-05-31 09:35:29316 伺服電機速度控制和轉矩控制都是用模擬量來控制,位置控制是通過發脈沖來控制。
2023-05-24 09:44:00635 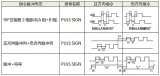
工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。
2023-05-22 10:28:48214 hi,調試電機時,閉環以9000rpm旋轉,不能按要求轉速旋轉。改變速度環 pi 會引起調整動作,但速度仍會增加。我可以知道要調整哪個參數嗎?
2023-05-19 09:29:43
的風扇,以便在發生故障之前對其進行更換。本文討論MAX6650和MAX6651這兩款具有線性閉環風扇速度控制的風扇控制器的工作原理。
2023-05-17 12:22:29819 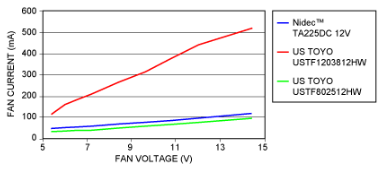
基于矢量控制的電流、速度、位置3閉環控制算法。該算法中速度閉環設計合理與否,對于整個伺服控制系統,特別是速度控制性能的發揮起到關鍵作用 。
2023-05-17 10:04:201055 伺服系統指經由閉環控制方式達到對一個機械系統的位置、速度和加速度的控制。
一個伺服系統的構成包括被控對象、執行器和控制器(負載、伺服電動機和功率放大器、控制器和反饋裝置)。
1. 執行器的功能
2023-05-16 14:46:430 一、什么是伺服電機?伺服電機是一種可以通過控制器精確地控制位置、速度和加速度的電機,主要由電機、編碼器和控制器三部分組成,具有高轉矩、高精度、快速響應和低轉速穩定特性,能夠在負載擾動、電壓變化及機械
2023-05-12 11:30:06624 
控制器控制伺服電機通常采用兩種指令方式:數字脈沖和模擬信號。數字脈沖這種方式與步進電機的控制方式類似,運動控制器給伺服驅動器發送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號;伺服驅動器工作在位
2023-05-09 14:43:031009 目錄. 一. 緒論 二. 電機速度環PID原理 三. STM32使用CAN總線實現大疆M3508電機的速度閉環控制 四. UCOS-III電機控制任務的實現
本文接上一篇STM32實現四驅小車
2023-05-06 10:28:266 根軌跡設計的主要思想是根據根軌跡圖預測閉環響應,該圖描繪了可能的閉環極點位置。然后,通過控制器添加零和/或極點,可以修改根
軌跡,以實現所需的閉環響應。
本節我們使用Controlsystemdesigner工具箱來協助我們進行根軌跡分析與控制器設計。
2023-05-06 10:06:360 伺服控制單元,即,經由閉環控制方式達到一個機械系統的位置,扭矩,速度或加速度的控制,是自動控制系統中的執行單元,是把上位控制
器的電信號轉換成電動機軸上的角位移或角速度輸出。
1. 控制器:動作
2023-05-06 09:34:343 伺服控制器故障處理資料
2023-05-05 22:54:06
1. 考慮的是整個系統,速度環和電流環之間是有關系的。
2. 整個控制器最有意思,核心的地方就是,考慮零極點和0db的點,如何使系統穩定,相位裕度最大。
3. 設計阻尼因子δ來調節零極點的分離
2023-05-05 14:31:561 速度控制和扭矩控制一樣,是車輛控制的必須功能,如駐波時就需要進行速度控制
2023-05-02 14:49:001023 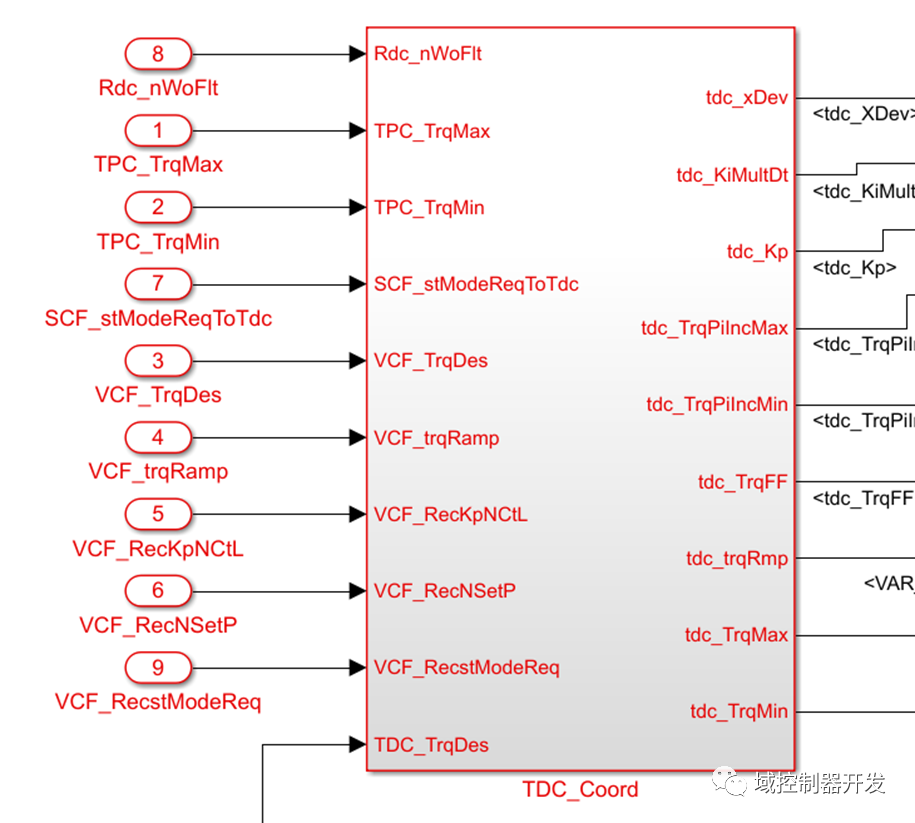
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的伺服控制,其實就是對伺服電機的位置控制。 其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-04-27 17:34:351113 
如何通過寫PWM程序來控制交流伺服電機的速度,就是說PWM的占空比還是頻率影響交流伺服電機的速度?如果是占空比影響速度,那么頻率影響什么,需要什么樣的頻率?
2023-04-10 11:52:15
。如果對位置和速度有一定的精度要求,而對實時轉矩不是很關心,用速度或位置模式比較好。如果上位控制器有比較好的閉環控制功能,用速度控制效果會好一點。如果本身要求不是很
2023-04-07 10:42:03728 器用于提升、傾斜、拉動或推動物體(圖 2)。我們這里使用的微型線性執行器由驅動部分的直流伺服電機和位置傳感部分的電位器組成。 對于該裝置,PID 控制器板需要輸出 12V PWM 信號來控制電機速度
2023-04-04 15:11:34
基于矢量控制的電流、速度、位置3閉環控制算法。該算法中速度閉環設計合理與否,對于整個伺服控制系統,特別是速度控制性能的發揮起到關鍵作用
2023-04-04 09:55:148064 
伺服電機是一種可控的精密電機,通過使用反饋控制系統來實現對位置、速度和加速度等參數的高精度控制。伺服電機常用于需要精密運動控制的應用場合,比如機床、印刷設備、自動化設計和工業自動化等領域,具有運動平穩性、定位精度、速度控制和重復性等方面的高性能。
2023-03-31 18:22:377454 伺服驅動器是一種電子設備,它通過向伺服電機提供適當的信號控制其轉動,從而實現對控制工件位置、速度、加速度等多種運動參數的精確控制。它廣泛應用于工業生產自動化領域的運動控制系統中,比如橡膠、塑料、紙張、印刷、包裝、木工、石材、玻璃、金屬、電子等產業中。
2023-03-31 18:02:071711 在本篇文章中,我們將使用Arduino開發板和20A電子速度控制器(ESC)控制A2212 / 1T無感BLDC外轉子電機(通常用于制作無人機)的速度。 所需的材料 ● A2212
2023-03-31 14:48:40
1.直流電機開環控制 在前面幾章節的基礎上,已經能夠通過光電編碼器測量電機的旋轉速度,也能夠通過STM32的定時器給出相應的PWM信號,這里就直接實踐,我們打開keil工程,在《直流電機開發
2023-03-30 11:14:150 需要本文中的仿真模型,關注微信公眾號: 淺談電機控制 ,獲取。異步電機矢量控制系統中,轉速的閉環控制必不可少,其是保證控制穩定性和控制性能的保證。矢量控制從其獲取速度的不同方法來分,可以分為有速度傳感器和
2023-03-29 11:42:460 上期文章介紹的磁鏈閉環、速度開環的異步電機無速度傳感器的矢量控制,基于其存在的在啟動時有一個較大的估計值且帶載能力弱的問題,本期文章介紹一種模型參考自適應的速度估計方法 (MARS)。
傳統
2023-03-29 10:11:310 矢量變頻器是一種常用的電機控制器,可通過閉環控制實現對電機轉矩、轉速等運動參數的精確控制。其閉環控制方法一般分為速度環和電流環兩種。
2023-03-28 16:12:533216 伺服電機配合伺服控制器精確控制電機軸的角位置、速度和加速度。這是通過帶有解析器(與控制器的模擬通信)或絕對或增量編碼器(與控制器的數字通信)的閉環反饋系統來實現的,它提供軸的位置信息和速度。
2023-03-25 17:16:441787 具有自動關機和過溫警報的風扇速度控制器
2023-03-24 14:49:00
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論