 電子發燒友App
電子發燒友App


1、硬件總體設計
無線渦輪流量計主體采用單片機作為處理和控制核心,連接脈沖信號處理電路、RS-232通信、存儲器、無線通信模塊、繼電器驅動電路和液晶顯示屏。ARM單片機通過處理渦輪傳感器輸出的脈沖信號計算出瞬時流量和累積流量,并發送到顯示屏和無線通信模塊,利用無線通信模塊將數據上傳到服務器。存儲元件選擇EEPROM和FLASH,EEPROM用于保存設置的參數,FLASH用于存儲一段時間內渦輪流量計狀態數據和流量數據。繼電器驅動電路用于驅動繼電器,從而控制電機實現閥門的開關。RS-232則用于該系統的調試。
2、單片機的選擇
系統選用低功耗高性能的 stm32f103cbt6?單片機作為處理核心。stm32f103cbt6?包含128K字節的可重擦寫閃存、20K字節的內部SRAM、32個通用I/O口、3個16位通用定時/計數器、2個12位ADC、3個US-ART接口、2個SPI接口。設計中用使用1個定時器/計數器計算累積流量,1個ADC通道計算瞬時流量,2個USART接口分別用于RS-232?通信以及與4G模塊的通信,1個SPI接口用于給顯示屏發送數據,還使用了若干通用I/O口控制4G模塊的開關機等。
3、電源電路
整個硬件電路需要提供5V、3.3V、3.8V電壓,分別供給繼電器驅動電路、ARM單片機和液晶顯示屏、4G通信模塊。4G模塊的功耗較大,電流峰值最大為2A,而其他電路所需供電電流只有幾十毫安,所以設計供電電流為2.5A。硬件電路采用9~30V外部供電和鋰電池供電兩種供電方式,先將電壓轉換成5V,然后利用不同的LDO芯片,將電壓分別轉換成3.3V?和3.8V。
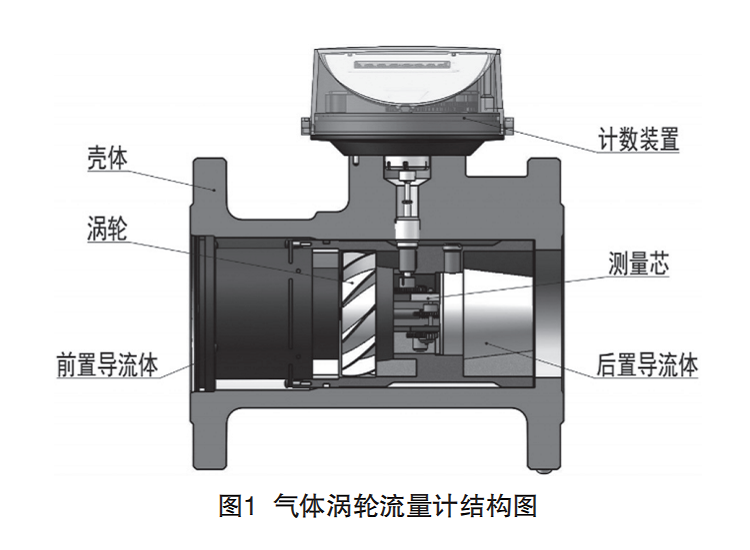
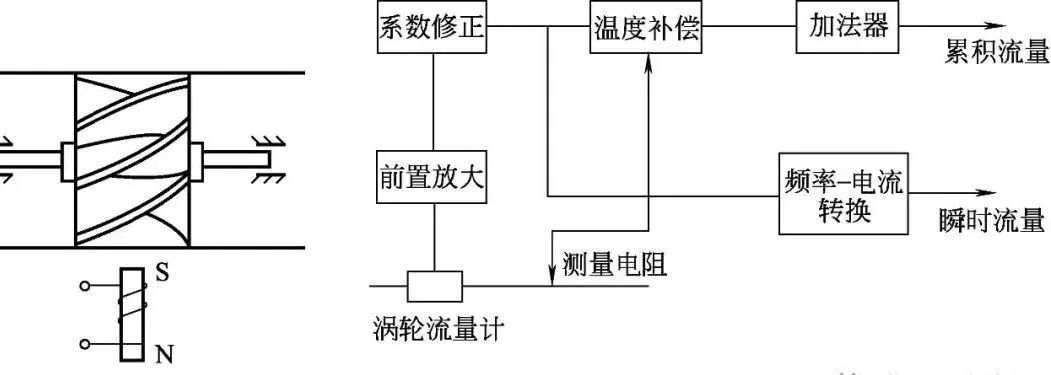
4、脈沖信號處理電路
渦輪傳感器輸出的脈沖信號不能被立即使用,需要經過濾波、放大、限幅、整型等處理。脈沖信號處理電路,其中接頭CH1連接渦輪傳感器的信號線與地線,Sensor-Pluse?端連接ARM單片機的定時器。脈沖信號首先要濾波處理,這里直接使用0.01μF的電容濾波;?然后采用軌對軌運放將信號最大放大到500倍,使脈沖信號高電平被限制在運放的輸出電壓;最后經過比較器整形后得到高電平為3.3V、低電平為0V的矩形脈沖信號。開啟定時器輸入捕獲模式,ARM單片機就能捕獲每一個脈沖,再利用周期法測量脈沖的頻率。
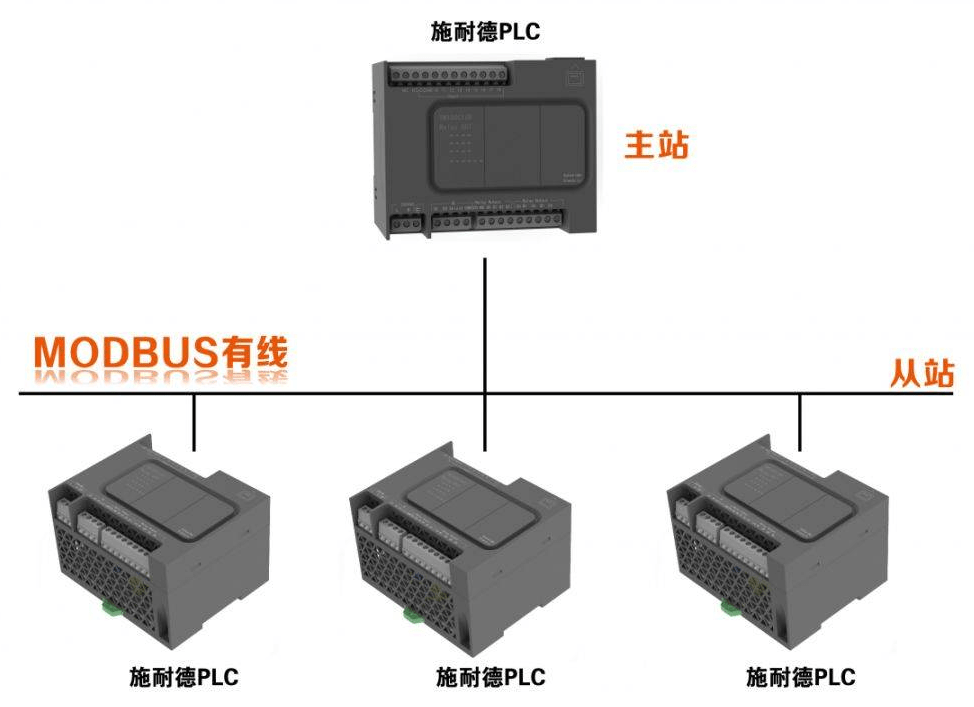
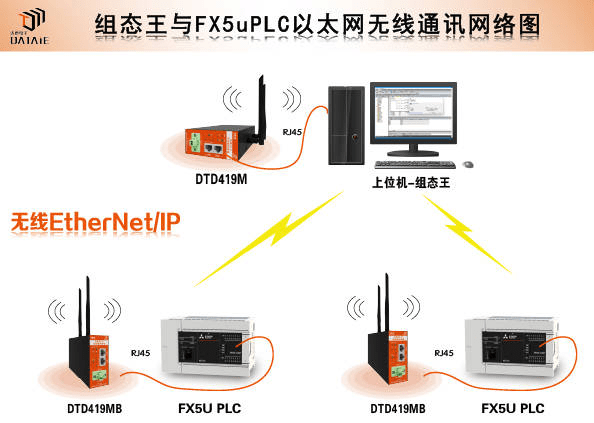
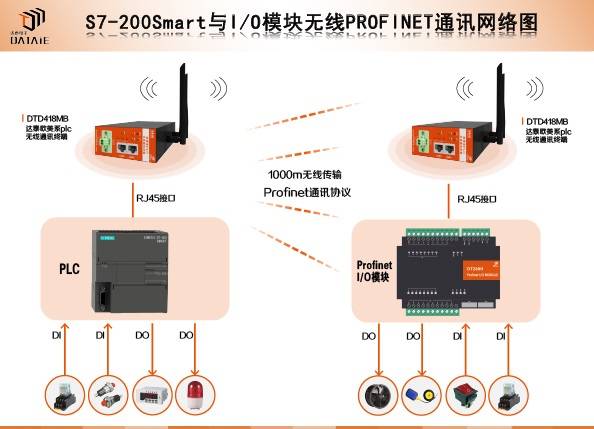
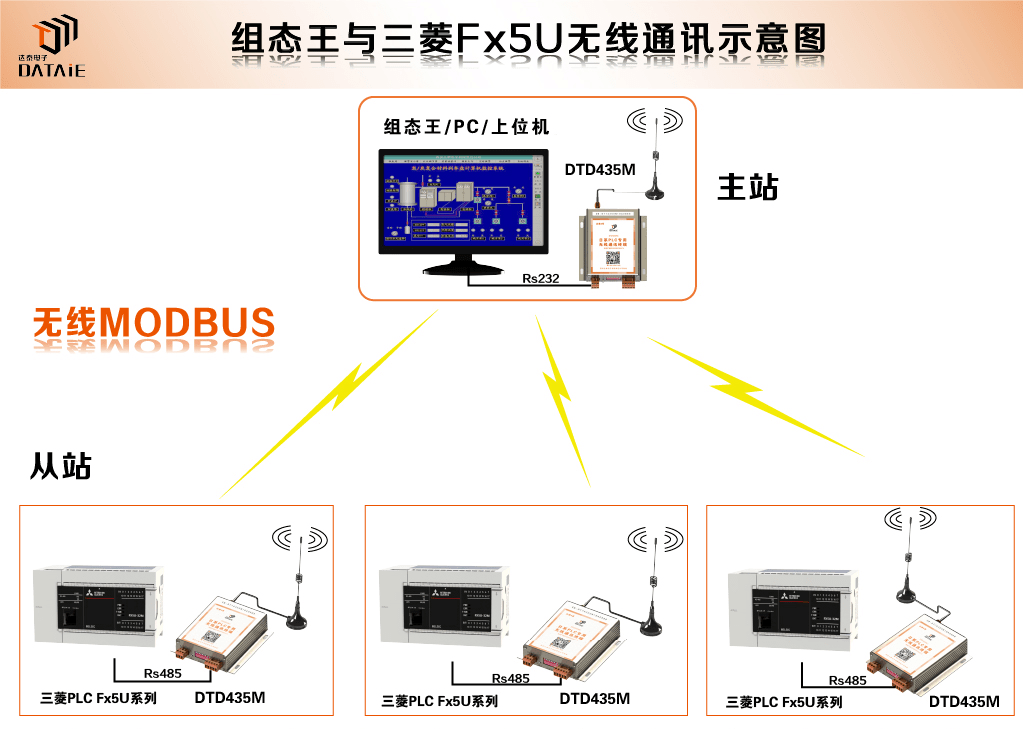
5、無線通信設計
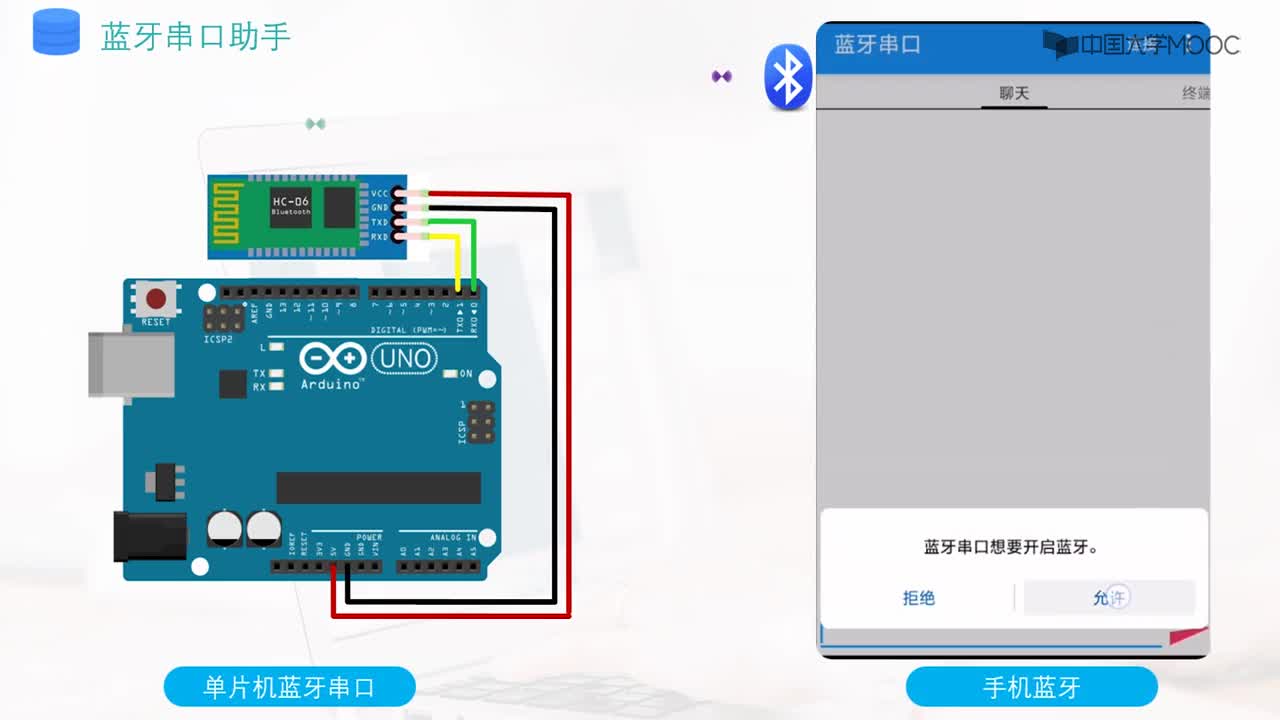
無線通信模塊選用移遠公司的EC200T-CN模塊。該模塊包含了三大運營商的七種網絡制式,可根據網絡情況隨時切換成2G、3G、4G網絡。模塊與控制器采用高速UART或USB2.0通信,具有SIM卡自動檢測、低功耗等特點。在開啟ARM單片機之后才能啟動4G通信模塊,通過ARM單片機IO口控制4G通信模塊是否供電、開關機、復位等。ARM單片機與4G通信模塊通過UART通信,但是由于ARM單片機系統電壓為3.3V,EC200T-CN模塊系統電壓為3.8V,需要電平轉換芯片進行轉換。
EC200T-CN模塊預留了一些IO口,配合相應的外圍電路即可實現讀取SIM卡信息、控制LED燈、連接射頻天線、USB通信。SIM卡信息用于網絡連接;LED燈用于判斷網絡運行狀態;?射頻天線用于實現接收和發送數據(射頻天線與硬件電路要求阻抗匹配);為便于EC200T-CN模塊的固件升級,預留了USB接口。
責任編輯:tzh

































 工商網監
工商網監
評論