 電子發(fā)燒友App
電子發(fā)燒友App


空戰(zhàn)決策知識(shí)構(gòu)建方法研究?
?本文來(lái)自《系統(tǒng)工程與電子技術(shù)》,作者呂躍等?
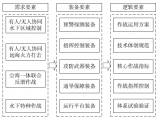
0 引言 隨著空戰(zhàn)訓(xùn)練以及作戰(zhàn)仿真實(shí)驗(yàn)的深入, 戰(zhàn)訓(xùn)數(shù)據(jù)隨之大量產(chǎn)生, 需要解決“數(shù)據(jù)豐富, 知識(shí)貧乏”的數(shù)據(jù)應(yīng)用問(wèn)題, 挖掘數(shù)據(jù)背后的空戰(zhàn)決策知識(shí), 客觀說(shuō)明“人在回路”的空戰(zhàn)對(duì)抗過(guò)程。空戰(zhàn)決策知識(shí)是指在特定的空戰(zhàn)態(tài)勢(shì)情境下, 通過(guò)飛行員潛意識(shí)對(duì)態(tài)勢(shì)的理解和判斷, 做出相應(yīng)機(jī)動(dòng)決策積累的定性經(jīng)驗(yàn)知識(shí)。定性經(jīng)驗(yàn)知識(shí)蘊(yùn)含在定量的戰(zhàn)訓(xùn)大數(shù)據(jù)中, 如何通過(guò)技術(shù)手段分析、處理定量數(shù)據(jù), 提取反應(yīng)優(yōu)秀飛行員空戰(zhàn)智慧經(jīng)驗(yàn)的戰(zhàn)術(shù)知識(shí), 對(duì)于指導(dǎo)飛行員空戰(zhàn)決策以及多智能體智能化作戰(zhàn)具有重大意義。 空戰(zhàn)決策知識(shí)構(gòu)建[1]是從外部空戰(zhàn)場(chǎng)態(tài)勢(shì)的顯性知識(shí)以及飛行員決策經(jīng)驗(yàn)型隱性知識(shí)轉(zhuǎn)換到計(jì)算機(jī)內(nèi)部的過(guò)程, 包含態(tài)勢(shì)信息事實(shí)性知識(shí)和決策規(guī)則性知識(shí)。在知識(shí)表達(dá)方面, 文獻(xiàn)[2]提出了一種基于情境構(gòu)建的經(jīng)驗(yàn)型隱性知識(shí)表示方法, 顯示飛行員空戰(zhàn)決策經(jīng)驗(yàn)知識(shí)用于無(wú)人戰(zhàn)斗機(jī)(unmanned combatair vehicle, UCAV)自主空戰(zhàn)決策; 文獻(xiàn)[3]基于謂詞演算, 提出飛行器能力的知識(shí)表示方法, 滿足飛行器自主決策的需求; 文獻(xiàn)[4]提出基于時(shí)序圖的作戰(zhàn)指揮行為知識(shí)表示學(xué)習(xí)方法, 有效地表征了具有時(shí)序關(guān)聯(lián)特征的作戰(zhàn)指揮行為。在空戰(zhàn)知識(shí)挖掘方面, 文獻(xiàn)[5]以飛行數(shù)據(jù)為研究對(duì)象, 提出改進(jìn)人工免疫算法對(duì)飛行狀態(tài)規(guī)則進(jìn)行提取, 驗(yàn)證了規(guī)則在實(shí)際應(yīng)用中的有效性; 文獻(xiàn)[6] 基于飛參特征變化和專家識(shí)別飛行動(dòng)作的先驗(yàn)知識(shí)建立了飛行動(dòng)作識(shí)別知識(shí)庫(kù), 可快速、準(zhǔn)確識(shí)別各種機(jī)動(dòng)動(dòng)作。從研究現(xiàn)狀來(lái)看, 在知識(shí)表達(dá)方面, 對(duì)于戰(zhàn)場(chǎng)決策影響因素分析不夠全面, 并且未能描述空戰(zhàn)決策知識(shí)之間因果關(guān)系; 在知識(shí)挖掘方面, 對(duì)于直接從戰(zhàn)訓(xùn)數(shù)據(jù)中獲取機(jī)動(dòng)決策規(guī)則知識(shí)的研究較少, 且對(duì)于海量戰(zhàn)訓(xùn)數(shù)據(jù)的挖掘利用不充分。 因此, 本文在戰(zhàn)訓(xùn)數(shù)據(jù)的應(yīng)用基礎(chǔ)上, 提出一種空戰(zhàn)決策知識(shí)構(gòu)建方法, 對(duì)空戰(zhàn)決策知識(shí)的生成過(guò)程與表示方法進(jìn)行分析與研究, 應(yīng)用k-means聚類、最小描述長(zhǎng)度準(zhǔn)則(minimum description length principle, MDLP)數(shù)據(jù)預(yù)處理算法實(shí)現(xiàn)對(duì)戰(zhàn)訓(xùn)數(shù)據(jù)的離群點(diǎn)檢測(cè)以及連續(xù)屬性離散化, 基于粗糙集理論和模糊邏輯推理實(shí)現(xiàn)空戰(zhàn)決策規(guī)則知識(shí)的挖掘與推理應(yīng)用, 并將構(gòu)建空戰(zhàn)決策知識(shí)應(yīng)用于空戰(zhàn)對(duì)抗過(guò)程中, 以期解決“數(shù)據(jù)豐富、知識(shí)貧乏”的數(shù)據(jù)應(yīng)用問(wèn)題。 1 空戰(zhàn)決策知識(shí) 空戰(zhàn)決策知識(shí)是對(duì)當(dāng)前對(duì)抗環(huán)境中空戰(zhàn)態(tài)勢(shì)和飛行員決策相互關(guān)系的抽象和描述, 它是建立在戰(zhàn)訓(xùn)數(shù)據(jù)和飛行員經(jīng)驗(yàn)基礎(chǔ)上的知識(shí)處理, 是知識(shí)提取和知識(shí)理解的綜合過(guò)程, 滿足知識(shí)處理的“戰(zhàn)訓(xùn)數(shù)據(jù)-特征信息-知識(shí)獲取-知識(shí)理解”層次結(jié)構(gòu)。 1.1 空戰(zhàn)決策知識(shí)的生成 空戰(zhàn)決策知識(shí)生成環(huán)節(jié)可以分為空戰(zhàn)對(duì)抗過(guò)程信息特征提取、決策知識(shí)的生成、決策知識(shí)的展現(xiàn)3個(gè)部分, 如圖 1所示。空戰(zhàn)對(duì)抗過(guò)程信息特征提取包括對(duì)戰(zhàn)訓(xùn)數(shù)據(jù)的預(yù)處理, 形成空戰(zhàn)態(tài)勢(shì)信息以及包含飛行員經(jīng)驗(yàn)的決策結(jié)果信息, 是知識(shí)生成環(huán)節(jié)的基礎(chǔ); 決策知識(shí)的生成是知識(shí)生成環(huán)節(jié)的核心, 包括知識(shí)的提取、推理以及理解應(yīng)用; 決策知識(shí)的展現(xiàn)表現(xiàn)為知識(shí)的可視化、互操作等, 是知識(shí)生成環(huán)節(jié)的后續(xù)階段[7]。
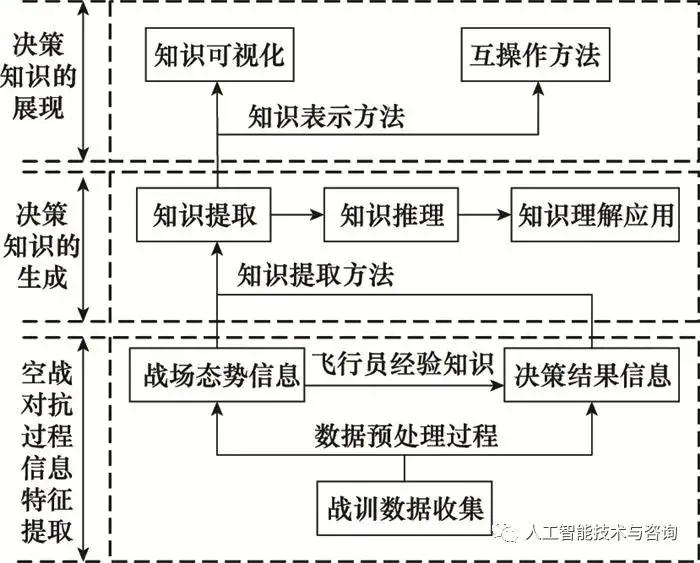
圖1 空戰(zhàn)決策知識(shí)生成過(guò)程 Fig.1 Air combat decision making knowledge generation process 本文將空戰(zhàn)決策知識(shí)分為戰(zhàn)場(chǎng)態(tài)勢(shì)信息事實(shí)性知識(shí)和飛行員決策規(guī)則性知識(shí)。戰(zhàn)場(chǎng)態(tài)勢(shì)信息事實(shí)知識(shí)是在戰(zhàn)訓(xùn)數(shù)據(jù)的基礎(chǔ)上規(guī)范化描述戰(zhàn)場(chǎng)的態(tài)勢(shì)要素, 即空間幾何態(tài)勢(shì)、作戰(zhàn)能力、空情事件等及其關(guān)系的表達(dá)。空間幾何態(tài)勢(shì)和空情事件表示狀態(tài)信息的動(dòng)態(tài)屬性知識(shí), 作戰(zhàn)能力表示特征信息的靜態(tài)屬性知識(shí)[8]。可以表示為 == (1) 式中: Situation為空間幾何態(tài)勢(shì)的函數(shù); Capability為相對(duì)作戰(zhàn)能力的函數(shù); Incident表征空情事件的函數(shù)。 空間態(tài)勢(shì)幾何函數(shù)可以表示為 Situation (t)={TA(φ,q,t),Tv(vm,vt,t),Th(hm,ht,t),Td(D,DRmax,DMmax,DMkmin,DMkmax,t)} Situation (t)={TA(φ,q,t),Tv(vm,vt,t),Th(hm,ht,t),Td(D,DRmax,DMmax,DMkmin,DMkmax,t)} (2) 式中: φ、q為目標(biāo)方位角、進(jìn)入角; vm、vt為載機(jī)、敵機(jī)速度; hm、ht為載機(jī)、敵機(jī)高度; D為雙方作戰(zhàn)單元的距離; DRmax為雷達(dá)最大探測(cè)距離; DMmax為導(dǎo)彈最大攻擊距離; DMkmax、DMkmin為不可逃逸最大最小距離; TA、Tv、Th、Td為角度、速度、高度、距離態(tài)勢(shì)函數(shù), 具體計(jì)算方式見參考文獻(xiàn)[8]。 相對(duì)作戰(zhàn)能力函數(shù)與敵我雙方戰(zhàn)機(jī)的總體作戰(zhàn)能力相關(guān), 表示為 C=[lnB+ln(∑A1+1)+ln(∑A2)]ε1ε2ε3ε4C=[lnB+ln(∑A1+1)+ln(∑A2)]ε1ε2ε3ε4 (3) 式中: C為戰(zhàn)斗機(jī)總體作戰(zhàn)能力; B、A1、A2分別為戰(zhàn)斗機(jī)的機(jī)動(dòng)能力參數(shù)、攻擊能力參數(shù)和探測(cè)能力參數(shù); ε1、ε2、ε3、ε4分別為操縱能力參數(shù)、生存能力參數(shù)、航程能力參數(shù)和電子對(duì)抗能力參數(shù)[9]。作戰(zhàn)能力為靜態(tài)屬性知識(shí), 通過(guò)戰(zhàn)場(chǎng)情報(bào)信息等手段獲取得到, 用離散值Capacity={-1, 0, 1}表征相對(duì)作戰(zhàn)能力的劣勢(shì)、均勢(shì)、優(yōu)勢(shì)。 空情事件函數(shù)表示影響空戰(zhàn)勝負(fù)關(guān)鍵事件的關(guān)系, 表示為 Incident(t)={RaderOn(t),RaderLock(t), Weapon (t)}Incident(t)={RaderOn(t),RaderLock(t), Weapon (t)} (4) 式中:RaderOn(t)={0, 1}表示雷達(dá)開關(guān)機(jī)情況, 0表示雷達(dá)未開機(jī), 1表示雷達(dá)已開機(jī); RaderLock(t)={0, 1}表示雷達(dá)鎖定情況, 0表示雷達(dá)未鎖定, 1表示雷達(dá)已鎖定; Weapon(t)={0, 1}表示武器發(fā)射情況, 0表示導(dǎo)彈未發(fā)射, 1表示導(dǎo)彈已發(fā)射。 飛行員決策規(guī)則性知識(shí)是飛行員在當(dāng)前態(tài)勢(shì)信息的基礎(chǔ)上, 根據(jù)作戰(zhàn)經(jīng)驗(yàn)以及個(gè)性化特征所做出的決策方案。 < Knowledge_of_Decision >=< Pilot (V), Action (Sa)>< Knowledge_of_Decision >=< Pilot (V), Action (Sa)> (5) 式中: Pilot(V)表示飛行員主觀風(fēng)險(xiǎn)態(tài)度形成的價(jià)值; Action(Sa)表示在飛行員在當(dāng)前態(tài)勢(shì)下的空戰(zhàn)決策方案。 在激烈的空戰(zhàn)對(duì)抗環(huán)境下, 飛行員不能完全保持理性, 所以在面對(duì)風(fēng)險(xiǎn)和收益時(shí)存在不同的態(tài)度, 從而導(dǎo)致決策結(jié)果的不同, 這也屬于空戰(zhàn)決策知識(shí)組成部分。前景理論將人的心理偏好引入決策過(guò)程中, 并將心理偏好以風(fēng)險(xiǎn)態(tài)度系數(shù)、損失規(guī)避系數(shù)等形式量化[10], 能夠較好的描述飛行員空戰(zhàn)個(gè)性化特征知識(shí)。 Pilot(V)=∑i=0nπ(pi)v(Δxi)Pilot(V)=∑i=0nπ(pi)v(Δxi) (6) 式中: π(pi)為決策權(quán)重; v(Δxi)為價(jià)值函數(shù); 具體形式為 v(Δx)={σ(Δx)α,Δx?0?δ(?Δx)β,Δx<0v(Δx)={σ(Δx)α,Δx?0?δ(?Δx)β,Δx<0 (7) 式中: Δx為結(jié)果相對(duì)于參考點(diǎn)的收益或者損失; α和β為飛行員的風(fēng)險(xiǎn)偏好及規(guī)避系數(shù), 描述價(jià)值函數(shù)在收益區(qū)域及損失區(qū)域的凹凸程度; σ和δ為收益敏感系數(shù)和損失厭惡系數(shù), 若飛行員對(duì)收益更加敏感, 則σ>δ≥1, 若飛行員對(duì)損失更加敏感, 則δ>σ≥1。 空戰(zhàn)決策方案集可以視為基本機(jī)動(dòng)動(dòng)作的組合, 當(dāng)前態(tài)勢(shì)下的決策方案集可以表示為 Action(Sa)=[j1,j2,?,jk]Action(Sa)=[j1,j2,?,jk] (8) 式中:k=1, 2, …, 11, jk表示基于NASA學(xué)者提出的7種基本機(jī)動(dòng)動(dòng)作,改進(jìn)得到完備的11種空戰(zhàn)機(jī)動(dòng)動(dòng)作[11], 決策問(wèn)題可以表示為 ψΔt≤ts:{hm,h˙m,φ,φ˙,vm}→[j1,j2,?,jk]ψΔt≤ts:{hm,h˙m,φ,φ˙,vm}→[j1,j2,?,jk] (9) 式中:Δt為采樣時(shí)間; ts表示決策過(guò)程時(shí)間上限; φ表示航向角; ψ為機(jī)動(dòng)動(dòng)作特征參數(shù)到?jīng)Q策方案集的決策函數(shù)。 通過(guò)對(duì)上述機(jī)動(dòng)動(dòng)作集及戰(zhàn)斗機(jī)姿態(tài)的變化規(guī)律分析, 總結(jié)出各類機(jī)動(dòng)動(dòng)作對(duì)應(yīng)上述特征參數(shù)的變化特征。將連續(xù)量機(jī)動(dòng)特征參數(shù)區(qū)間化, 從而形成和定性描述的變化特征形成一一對(duì)應(yīng)關(guān)系[12]。 在空戰(zhàn)的高對(duì)抗性下, 飛機(jī)機(jī)動(dòng)是在極短時(shí)間內(nèi)根據(jù)態(tài)勢(shì)情況調(diào)整機(jī)動(dòng)動(dòng)作特征屬性變化的過(guò)程。本文用區(qū)間數(shù)[t, t+Δt]描述特征屬性的變化范圍, 將機(jī)動(dòng)動(dòng)作集根據(jù)變化規(guī)律進(jìn)行區(qū)間化, 將戰(zhàn)訓(xùn)數(shù)據(jù)中機(jī)動(dòng)動(dòng)作特征指標(biāo)值作為比較序列, 機(jī)動(dòng)動(dòng)作集中的區(qū)間基準(zhǔn)特征值作為參考序列, 基于灰色關(guān)聯(lián)度模型, 求得關(guān)聯(lián)度大小來(lái)識(shí)別機(jī)動(dòng)動(dòng)作, 基于區(qū)間灰色關(guān)聯(lián)度機(jī)動(dòng)動(dòng)作識(shí)別模型實(shí)施步驟如下所示。 步驟 1 將機(jī)動(dòng)動(dòng)作基準(zhǔn)特征參數(shù)區(qū)間化 u~ij=[uij???,uijˉˉˉˉˉˉ]=[xij?2σij,xij+2σij]u~ij=[uij_,uijˉ]=[xij?2σij,xij+2σij] (10) 式中:u~u~ij表示第i種基準(zhǔn)機(jī)動(dòng)動(dòng)作的第j種特征指標(biāo)值區(qū)間數(shù); xij表示第i種基準(zhǔn)機(jī)動(dòng)動(dòng)作的第j種特征指標(biāo)值; σij表示標(biāo)準(zhǔn)方差。 步驟 2 構(gòu)建決策矩陣Uˉ=[uijˉˉˉˉˉˉ]11×5Uˉ=[uijˉ]11×5并進(jìn)行規(guī)范化處理, 得到新矩陣V~=[v~ij]11×5V~=[v~ij]11×5, 規(guī)范化方法見參考文獻(xiàn)[8]。 步驟 3 計(jì)算比較序列與參考序列之間的關(guān)聯(lián)系數(shù)ξi(k) ξi(k)=minimink(D0i)+ρmaximaxk(D0i)D0i+ρmaximaxk(D0i)ξi(k)=minimink(D0i)+ρmaximaxk(D0i)D0i+ρmaximaxk(D0i) (11) 式中:ρ為分辨系數(shù); D0i為比較序列與參考序列區(qū)間數(shù)的歐式距離。 步驟 4 計(jì)算待識(shí)別機(jī)動(dòng)動(dòng)作與基本動(dòng)作集的關(guān)聯(lián)度Zi, 比較關(guān)聯(lián)度大小識(shí)別機(jī)動(dòng)動(dòng)作。 Zi=1n∑k=1nξi(k),k=1,2,?,nZi=1n∑k=1nξi(k),k=1,2,?,n (12) 1.2 空戰(zhàn)決策知識(shí)的表示 空戰(zhàn)決策知識(shí)是態(tài)勢(shì)屬性結(jié)合飛行員特征到機(jī)動(dòng)動(dòng)作的映射, 既包含事實(shí)性知識(shí)又包含規(guī)則性知識(shí), 存在知識(shí)間的因果關(guān)系。產(chǎn)生式規(guī)則表示法用于表示知識(shí)之間的因果關(guān)系, 與人的判斷性知識(shí)基本一致, 且可以提供高粒度信息, 容易描述事實(shí)、規(guī)則以及它們的數(shù)量測(cè)度[13], 適用于空戰(zhàn)決策知識(shí)的表示。 1.2.1 戰(zhàn)場(chǎng)態(tài)勢(shì)信息事實(shí)性知識(shí)的表示 產(chǎn)生式表示方法一般采用3元組對(duì)象、屬性、值或者3元組關(guān)系、對(duì)象1、對(duì)象2來(lái)表示戰(zhàn)場(chǎng)態(tài)勢(shì)信息事實(shí)。若考慮態(tài)勢(shì)信息獲取的不確定性, 可以加入可信度量用4元組對(duì)象、屬性、值、可信度來(lái)表示。例如: (敵機(jī), 角度威脅值, 0.5)(態(tài)勢(shì), 載機(jī), 敵機(jī))(空情事件, 武器發(fā)射, 1, 0.8)。 1.2.2 飛行員決策規(guī)則知識(shí)的表示 飛行員決策規(guī)則知識(shí)是指在空戰(zhàn)問(wèn)題中的因果關(guān)系的知識(shí), 可表示為 if Condition then Action(Sa) if Condition then Action(Sa) (13) 式中: condition為規(guī)則前件, 是戰(zhàn)場(chǎng)態(tài)勢(shì)信息以及飛行員個(gè)性化特征的合取, 表示為 Condition =( Situation ∧ Capability ∧ Incident ∧Pilot(V)) Condition =( Situation ∧ Capability ∧ Incident ∧Pilot(V)) (14) 式中:Action(Sa)為規(guī)則后件, 是基于規(guī)則前件的決策方案。 2 戰(zhàn)訓(xùn)數(shù)據(jù)預(yù)處理 在戰(zhàn)訓(xùn)數(shù)據(jù)收集、存儲(chǔ)過(guò)程中,如果受到外界環(huán)境的干擾, 所記錄的戰(zhàn)訓(xùn)數(shù)據(jù)將會(huì)包含隨機(jī)干擾和誤差, 數(shù)據(jù)中存在離群點(diǎn), 導(dǎo)致數(shù)據(jù)質(zhì)量難以滿足空戰(zhàn)知識(shí)挖掘的要求。其次, 戰(zhàn)訓(xùn)數(shù)據(jù)采用連續(xù)值記錄的方式難以滿足算法離散度量屬性的要求。基于此, 本節(jié)采用基于k-means聚類的離群點(diǎn)檢測(cè)以及基于MDLP的連續(xù)屬性離散化來(lái)處理原始戰(zhàn)訓(xùn)數(shù)據(jù), 解決低質(zhì)量戰(zhàn)訓(xùn)數(shù)據(jù)導(dǎo)致的知識(shí)挖掘算法執(zhí)行效率低以及知識(shí)生成偏差的問(wèn)題。 2.1 基于k-means聚類的離群點(diǎn)檢測(cè) 基于k-means聚類的離群點(diǎn)檢測(cè)是通過(guò)聚類分析發(fā)現(xiàn)與其他對(duì)象無(wú)強(qiáng)相關(guān)的對(duì)象, 如果一個(gè)對(duì)象不強(qiáng)屬于任何簇, 則認(rèn)為該對(duì)象屬于聚類的離群點(diǎn)[14]。戰(zhàn)訓(xùn)數(shù)據(jù)集D被k-means聚類算法分為k個(gè)簇, C={C1, C2, …, Ck}, 對(duì)象p與所有簇間距離間的加權(quán)平均值為離群因子OF(p)。 OF(p)=∑i=1k|Cj||D|?d(p,Cj)OF(p)=∑i=1k|Cj||D|?d(p,Cj) (15) 基于k-means聚類的離群點(diǎn)檢測(cè)流程如表 1所示。 表1 離群點(diǎn)檢測(cè)流程 Table 1 Process of outlier detection(t),capability,incident(t)>(t),capability,incident(t)>
| 輸入 戰(zhàn)訓(xùn)數(shù)據(jù)集D; 聚類個(gè)數(shù)k; |
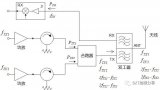
新窗口打開| 下載CSV 基于k-means聚類的離群點(diǎn)檢測(cè)的時(shí)間和空間復(fù)雜度是線性或者接近于線性的, 效率較高, 適用于大規(guī)模數(shù)據(jù)集。 2.2 基于MDLP的連續(xù)屬性離散化 屬性值離散化是進(jìn)行數(shù)據(jù)壓縮、提取決策規(guī)則的基礎(chǔ), 有效的屬性離散化算法不僅可以提高知識(shí)挖掘的效率, 并且可以從得到的離散戰(zhàn)訓(xùn)數(shù)據(jù)中獲取相對(duì)簡(jiǎn)潔的空戰(zhàn)決策知識(shí)規(guī)則。 MDLP是一種具備監(jiān)督連續(xù)屬性離散化的技術(shù), 在選擇最佳的切分點(diǎn)時(shí), 考慮決策信息對(duì)屬性進(jìn)行遞歸分割的影響[15], 其消息編碼的位數(shù)l為 l=Ent(O)=?∑i=1kpilog2pil=Ent(O)=?∑i=1kpilog2pi (16) 式中: 編碼位數(shù)l對(duì)應(yīng)了分類的熵Ent(O); k對(duì)應(yīng)連續(xù)屬性論域O={O1, O2, …, Ok}被決策屬性A∈D分割后子集的個(gè)數(shù)。 條件屬性B∈C將O′∈O分為若干子集O′={O′1, O′2, …, O′m}, 則條件屬性B對(duì)O分類后的熵為 Ent(B,O)=∑i=1mpiEnt(Oi)Ent(B,O)=∑i=1mpiEnt(Oi) (17) 式中: pi為權(quán)重, 即Oi的元素占論域O的比例。 pi=|Oi||O|,i=1,2?,mpi=|Oi||O|,i=1,2?,m (18) 條件屬性B會(huì)影響信息熵的壓縮, 信息增益為 Gain(B)=Ent(O)?Ent(B,O)Gain(B)=Ent(O)?Ent(B,O) (19) 基于MDLP的連續(xù)屬性離散化方法實(shí)施步驟為: 首先確定所有的候選離散切分點(diǎn)集dj(j=1, 2, …, k), 在確定候選集時(shí)不需要在所有屬性值中間確定切分點(diǎn), 只需將屬性值排序后選取類別不同的兩點(diǎn)值間作為候選切分點(diǎn)。其次, 搜尋點(diǎn)df將論域O劃分為O=O1∪O2兩部分, 并且滿足以下條件: Gain(df)>log2(n?1)n+δ(df)nGain(df)>log2(n?1)n+δ(df)n (20) 式中: δ(df)=log2(3t?2)?tEnt(O)+∑i=12tiEnt(Oi)δ(df)=log2(3t?2)?tEnt(O)+∑i=12tiEnt(Oi) (21) 式中: n=|O|為戰(zhàn)訓(xùn)數(shù)據(jù)樣本數(shù); t為論域O中包含的類別數(shù)。 最后, 將上述O1、O2兩子區(qū)間重復(fù)遞歸上述步驟, 直至式(20)不滿足為止。 3 基于粗糙集模糊理論的空戰(zhàn)決策知識(shí)推理 粗糙集(rough set, RS)理論能夠有效地處理戰(zhàn)訓(xùn)數(shù)據(jù), 從中發(fā)現(xiàn)隱含的空戰(zhàn)決策知識(shí), 通過(guò)決策知識(shí)屬性的約簡(jiǎn), 提取飛行員空戰(zhàn)最小決策規(guī)則知識(shí)。模糊邏輯(fuzzy logical, FL)推理能夠?qū)?zhàn)場(chǎng)態(tài)勢(shì)信息和飛行員個(gè)性化特征, 根據(jù)粗糙集提取的最小決策規(guī)則推理得到模糊邏輯決策即機(jī)動(dòng)動(dòng)作的控制量, 實(shí)現(xiàn)空戰(zhàn)決策知識(shí)的推理與應(yīng)用。 3.1 基于RS最小空戰(zhàn)決策規(guī)則知識(shí)庫(kù) S=(U, A, V, f)[16]是空戰(zhàn)決策知識(shí)信息表, 其中: U={x1, x2, …, xm}為戰(zhàn)訓(xùn)數(shù)據(jù)集; A=C∪D={a1, a2, …, an}為屬性集合; 子集C為條件屬性, 代表戰(zhàn)場(chǎng)態(tài)勢(shì)信息及飛行員個(gè)性化特征; 子集D為決策屬性, 代表機(jī)動(dòng)動(dòng)作方案集; V=?a∈AVaV=?a∈AVa為屬性值的集合, f: U×A→V為U和A之間的關(guān)系集。 屬性子集a在U上不可分辨關(guān)系Ia為 Ia={(x,y)∈U×U:f(x,a)=f(y,a),?a∈A}Ia={(x,y)∈U×U:f(x,a)=f(y,a),?a∈A} (22) 在S中屬性a的決策矩陣[17]為 MDa(S)=(δDa(xi,xj))m×mMaD(S)=(δaD(xi,xj))m×m (23) 式中: δDa(xi,xj)={a∈A:a(xi)≠a(xj) 且 ?A(xi)≠?A(xj)}δaD(xi,xj)={a∈A:a(xi)≠a(xj) 且 ?A(xi)≠?A(xj)} (24) 通過(guò)決策矩陣ΜαD建立x∈U的決策函數(shù)為 fDA(x)=?y∈U{∨a?:a∈δDA(x,y) 且 δDA(x,y)≠?}fAD(x)=?y∈U{∨a?:a∈δAD(x,y) 且 δAD(x,y)≠?} (25) 對(duì)信息表S中所有決策類進(jìn)行區(qū)分: gDA(U)=?x∈UfDA(x)gAD(U)=?x∈UfAD(x) (26) 式中: gAD(U)的主蘊(yùn)涵表示區(qū)分決策類所需條件屬性最小子集。 決策表中決策屬性D的約簡(jiǎn)滿足下述關(guān)系: B∈Red(S, D)?∧a∈Ba?∧a∈Ba?為gAD(U)的一個(gè)主蘊(yùn)涵; B∈Red(S, x, D)?∧a∈Ba?∧a∈Ba?為fAD(x)的一個(gè)主蘊(yùn)涵。 由約簡(jiǎn)確定最小決策規(guī)則: RUL(S,x,d)={FB(x)→(?B=?B(x)):B∈Red(S,x,d)}RUL(S,x,d)={FB(x)→(?B=?B(x)):B∈Red(S,x,d)} (27) RUL(S,d)=?x∈URUL(S,x,d)RUL(S,d)=?x∈URUL(S,x,d) (28) 3.2 空戰(zhàn)決策規(guī)則知識(shí)模糊邏輯推理 模糊邏輯推理是基于模糊邏輯中的蘊(yùn)涵關(guān)系和推理規(guī)則來(lái)進(jìn)行[18], 是模糊邏輯控制的基礎(chǔ), 是進(jìn)行不確定性推理的方法之一, 空戰(zhàn)決策規(guī)則知識(shí)模糊邏輯推理系統(tǒng)組成如圖 2所示。
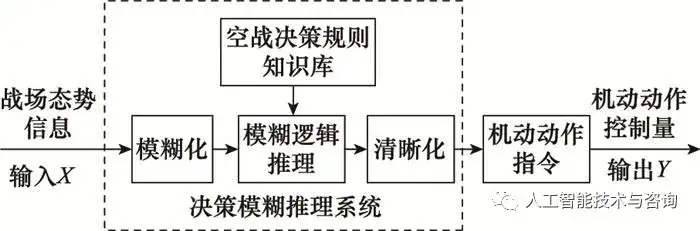
圖2 模糊邏輯推理系統(tǒng)組成 Fig.2 Composition of fuzzy logic inference system 決策模糊推理系統(tǒng)的輸入X與輸出Y分別為戰(zhàn)場(chǎng)態(tài)勢(shì)信息以及飛行員個(gè)性化特征知識(shí)X={Situation, Capacity, Incident, Pilot}和機(jī)動(dòng)動(dòng)作控制量切向過(guò)載、法向過(guò)載以及滾轉(zhuǎn)角Y={nx, nz, γ}, 其數(shù)學(xué)表現(xiàn)形式為 X(x1,x2,x3,x4)?FLJ(j1,j2,?,j11)?MPY={nx,ny,γ}X(x1,x2,x3,x4)?FLJ(j1,j2,?,j11)?MPY={nx,ny,γ} (29) 式中: FL表示模糊推理過(guò)程; J為11中機(jī)動(dòng)動(dòng)作方案集; MP機(jī)動(dòng)動(dòng)作與控制量之間的對(duì)應(yīng)關(guān)系。 空戰(zhàn)決策規(guī)則知識(shí)庫(kù)由粗糙集理論進(jìn)過(guò)屬性約簡(jiǎn)后確定的最小決策規(guī)則得到, 用“if…then…”語(yǔ)句表示, 其規(guī)則庫(kù)形式為 R={R1MISO,R2MISO,?,RnMISO}R={RMISO1,RMISO2,?,RMISOn} (30) 式中: RMISO表示多輸入單輸出規(guī)則。 RiMISO={[(A1×A2×?×An)→Di1],[(A1×A2×?×An)→Di2],?,[(A1×A2×?×An)→Diq]}RMISOi={[(A1×A2×?×An)→Di1],[(A1×A2×?×An)→Di2],?,[(A1×A2×?×An)→Diq]} (31) 對(duì)于第i條規(guī)則的模糊蘊(yùn)涵關(guān)系Ri定義為 Ri=(A1 and A2 and ? and Ai)→DiRi=(A1 and A2 and ? and Ai)→Di (32) 即: uRi=u(A1 and A2 and ? and Ai)→Di(a1,a2,?,ai,di)=[uA1(a1) and uA2(a2) and ? and uAi(ai)]→uDi(di)uRi=u(A1 and A2 and ? and Ai)→Di(a1,a2,?,ai,di)=[uA1(a1) and uA2(a2) and ? and uAi(ai)]→uDi(di) (33) 式中: u為模糊隸屬度函數(shù)。 3.3 空戰(zhàn)決策知識(shí)構(gòu)建流程 將粗糙集理論和模糊邏輯推理理論相結(jié)合構(gòu)成了空戰(zhàn)決策知識(shí)的構(gòu)建模型, 其基礎(chǔ)是戰(zhàn)訓(xùn)數(shù)據(jù)以及戰(zhàn)訓(xùn)數(shù)據(jù)的預(yù)處理, 具體流程如圖 3所示。
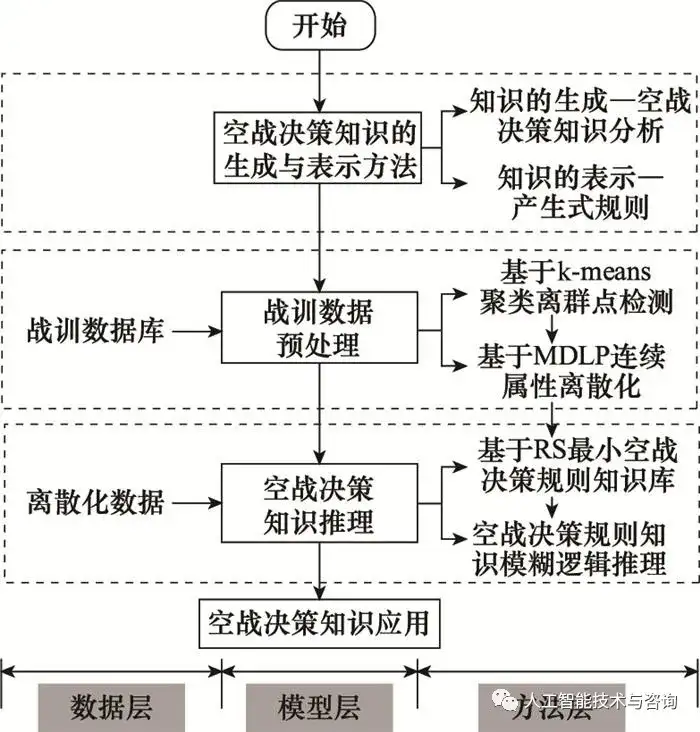
圖3 空戰(zhàn)決策知識(shí)構(gòu)建流程 Fig.3 Construction process of Air combat decision knowledge 4 仿真分析與驗(yàn)證 4.1 戰(zhàn)訓(xùn)數(shù)據(jù)預(yù)處理 選取部分飛行速度數(shù)據(jù)為例, 并檢驗(yàn)算法的有效性, 設(shè)置參數(shù)k=2, 閾值Θ=1 500。待檢測(cè)速度樣本以及離群點(diǎn)檢測(cè)如圖 4所示。
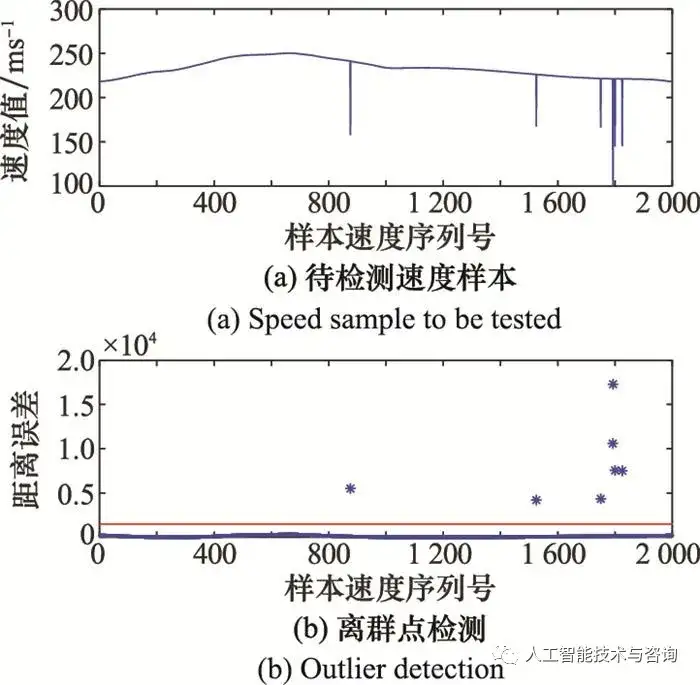
圖4 原始數(shù)據(jù)離群點(diǎn)檢測(cè) Fig.4 Original data outlier detection 從圖 4檢測(cè)結(jié)果來(lái)看, 待檢測(cè)速度樣本中存在離群點(diǎn), 序列號(hào)為(876, 1 525, 1 750, 1 792, 1 793, 1 800, 1 825), 表明本文采用的數(shù)據(jù)離群點(diǎn)檢測(cè)方法是有效的。 將機(jī)動(dòng)動(dòng)作識(shí)別結(jié)果作為決策屬性, 根據(jù)戰(zhàn)訓(xùn)數(shù)據(jù)中角度、速度、距離和高度數(shù)據(jù), 以及文獻(xiàn)[8]提出的態(tài)勢(shì)優(yōu)勢(shì)函數(shù), 計(jì)算得到戰(zhàn)場(chǎng)態(tài)勢(shì)信息事實(shí)性知識(shí)中的空間幾何態(tài)勢(shì)為連續(xù)屬性值, 部分節(jié)點(diǎn)態(tài)勢(shì)值如圖 5所示, 基于MDLP連續(xù)屬性離散化方法得到離散型知識(shí), 如圖 6所示。
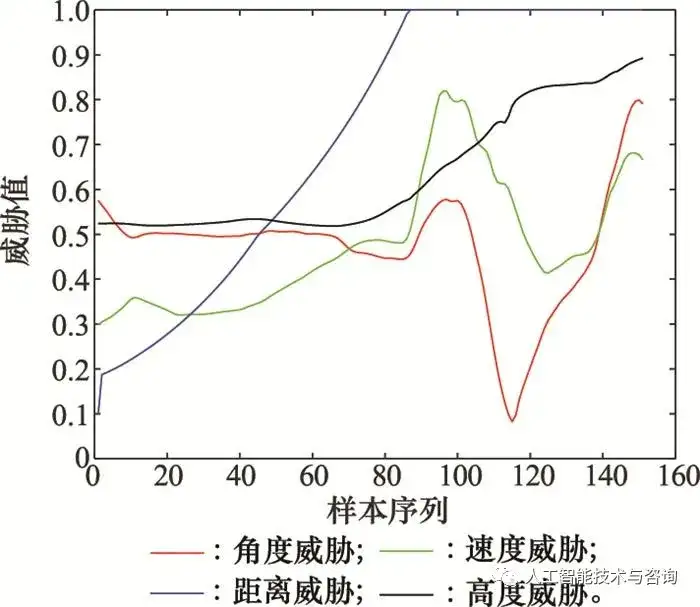
圖5 空戰(zhàn)幾何態(tài)勢(shì)圖 Fig.5 Geometry of air combat
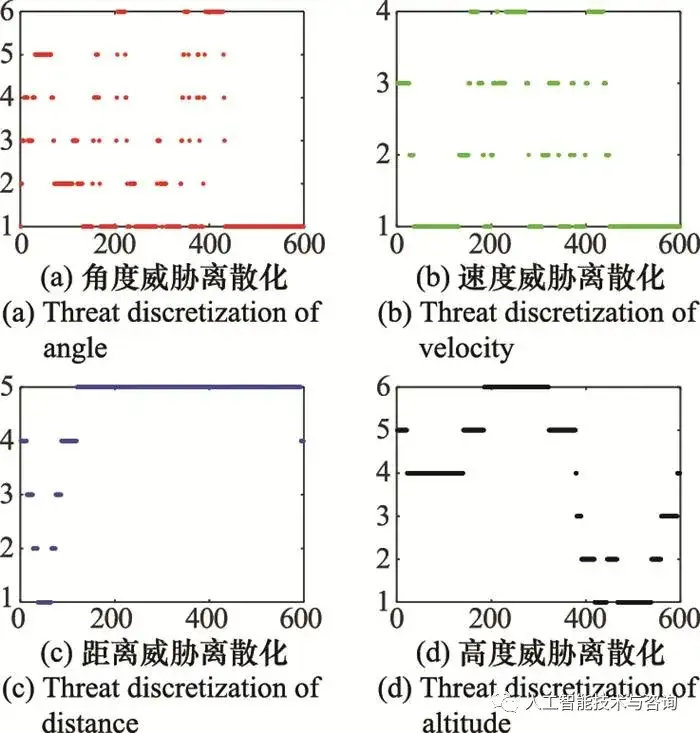
圖6 離散化空戰(zhàn)幾何態(tài)勢(shì)知識(shí) Fig.6 Discretization of geometric situation knowledge of air combat 從圖 5空戰(zhàn)幾何態(tài)勢(shì)圖來(lái)看, 空戰(zhàn)對(duì)抗過(guò)程是高對(duì)抗性以及高敏捷性的敵我雙方博弈過(guò)程, 飛行員根據(jù)作戰(zhàn)經(jīng)驗(yàn)以及對(duì)空戰(zhàn)事實(shí)性知識(shí)的理解, 做出相應(yīng)的機(jī)動(dòng)動(dòng)作, 這其中包含了豐富的空戰(zhàn)決策知識(shí), 從中提取有效的決策規(guī)則知識(shí)對(duì)于指導(dǎo)飛行員作戰(zhàn)以及空戰(zhàn)智能決策具有重要意義。 從圖 6離散化結(jié)果來(lái)看, MDLP方法分別選取了角度威脅、速度威脅、距離威脅和高度威脅連續(xù)屬性的5個(gè)、3個(gè)、4個(gè)、5個(gè)切分點(diǎn), 并將其分為[1,6]、[1,4]、[1,5]、[1,6]離散值區(qū)間, 滿足式(20)條件, 切分點(diǎn)如表 2所示。 表2 切分點(diǎn)區(qū)間 Table 2 Segmentation points interval
| 威脅屬性 | 切分點(diǎn)區(qū)間 |
新窗口打開| 下載CSV 4.2 機(jī)動(dòng)動(dòng)作識(shí)別 選取時(shí)間間隔Δt=0.5 s, 分辨系數(shù)ρ=0.5, 用區(qū)間數(shù)表示戰(zhàn)訓(xùn)數(shù)據(jù)中記錄的我方機(jī)動(dòng)動(dòng)作特征參數(shù)值, 每種機(jī)動(dòng)動(dòng)作的識(shí)別用5種特征參數(shù)計(jì)算, 即高度hm、高度變化率h˙h˙m、航向角φ、航向角變化率φ˙φ˙、速度vm。根據(jù)專家知識(shí)將機(jī)動(dòng)動(dòng)作集J=[j1, j2, …, jk], k=1, 2, …, 11依次分為勻速直飛、加速前飛、減速前飛、爬升、左爬升、右爬升、俯沖、左俯沖、右俯沖、左轉(zhuǎn)彎、右轉(zhuǎn)彎11種, 各機(jī)動(dòng)動(dòng)作參數(shù)特征分析如表 3所示。 表3 機(jī)動(dòng)動(dòng)作特征參數(shù)分析 Table 3 Analysis of characteristic parameters of maneuver
| J | hm | h˙h˙m | φ | φ˙φ˙ | vm |
新窗口打開| 下載CSV 根據(jù)式(10)得到的計(jì)算機(jī)動(dòng)動(dòng)作特征參數(shù)方差σij, 得到基準(zhǔn)特征參數(shù)區(qū)間數(shù)u~u~ij, 構(gòu)建決策矩陣并規(guī)范化處理得到新矩陣V~V~, 將待識(shí)別機(jī)動(dòng)動(dòng)作的特征參數(shù)值作為行向量, 規(guī)范化處理后計(jì)算與參考序列之間的距離D0i, 根據(jù)式(11)計(jì)算比較序列與參考序列之間的關(guān)聯(lián)系數(shù)ξi(k), 根據(jù)式(12)計(jì)算關(guān)聯(lián)度大小Zi, 比較關(guān)聯(lián)度大小識(shí)別機(jī)動(dòng)動(dòng)作, 基于區(qū)間關(guān)聯(lián)度的機(jī)動(dòng)動(dòng)作識(shí)別結(jié)果如圖 7所示。
圖7 機(jī)動(dòng)動(dòng)作識(shí)別 Fig.7 Maneuvering identification 4.3 空戰(zhàn)最小決策規(guī)則提取 在空戰(zhàn)對(duì)抗前, 根據(jù)戰(zhàn)場(chǎng)情報(bào)信息等手段判斷敵機(jī)類型, 根據(jù)式(3)計(jì)算得到敵我雙方相對(duì)作戰(zhàn)能力; 在戰(zhàn)訓(xùn)大數(shù)據(jù)中包含了雷達(dá)的開關(guān)機(jī)時(shí)間、雷達(dá)狀態(tài)、武器狀態(tài)等信號(hào)參數(shù), 通過(guò)對(duì)數(shù)據(jù)的分析、提取, 得到空情事件的狀態(tài), 形成空情事件知識(shí); 在高對(duì)抗性和敏捷性的空戰(zhàn)環(huán)境下, 飛行員面對(duì)態(tài)勢(shì)風(fēng)險(xiǎn)和收益時(shí), 根據(jù)飛行員主觀特點(diǎn)以及經(jīng)驗(yàn), 會(huì)有保守型, 穩(wěn)健型和冒險(xiǎn)型的不同決策態(tài)度, 這也是空戰(zhàn)決策知識(shí)的組成部分之一, 根據(jù)式(6)~式(7)和文獻(xiàn)[10]方法計(jì)算得到不同飛行員在面對(duì)不同態(tài)勢(shì)下的價(jià)值, 離散化形成飛行員個(gè)性化特征知識(shí)。為了表示方便將角度威脅、速度威脅、距離威脅、高度威脅、相對(duì)作戰(zhàn)能力、雷達(dá)開關(guān)機(jī)、雷達(dá)鎖定、武器發(fā)射、飛行員個(gè)性化特征9個(gè)空戰(zhàn)決策條件屬性記為a1, a2, a3, a4, a5, a6, a7, a8, a9, 空戰(zhàn)機(jī)動(dòng)動(dòng)作決策屬性記為D, 由于篇幅限制, 列出部分節(jié)點(diǎn)空戰(zhàn)知識(shí)構(gòu)建決策信息表如表 4所示。 表4 決策信息表 Table 4 Decision information table
| 戰(zhàn)訓(xùn)數(shù)據(jù)集U | 決策屬性D | 條件屬性C | ? | ? | ? | ? | ? | ? |
| a1 | a2 | a3 | a4 | a5 | a6 | a7 | a8 | a9 |
新窗口打開| 下載CSV 通過(guò)式(22)~式(24)構(gòu)建對(duì)稱的決策矩陣MaD(S)600×600, 由于決策信息表中存在不相容的數(shù)據(jù), 說(shuō)明針對(duì)不同的態(tài)勢(shì)知識(shí)情況, 飛行員做出的決策存在不確定性, 本文暫不考慮, 將不相容數(shù)據(jù)刪除處理。決策表全局約簡(jiǎn)為 gDA(U)=?x∈UfDA(x)=(a1∧a2∧a3∧a4∧a9)∨(a1∧a2∧a3∧a4∧a8)gAD(U)=?x∈UfAD(x)=(a1∧a2∧a3∧a4∧a9)∨(a1∧a2∧a3∧a4∧a8) 空戰(zhàn)知識(shí)全局決策具有下列主蘊(yùn)涵: (a1∧a2∧a3∧a4∧a9),(a1∧a2∧a3∧a4∧a8)(a1∧a2∧a3∧a4∧a9),(a1∧a2∧a3∧a4∧a8) 這些主蘊(yùn)涵可以導(dǎo)出屬性約簡(jiǎn): {a5,a6,a7,a8},{a5,a6,a7,a9}{a5,a6,a7,a8},{a5,a6,a7,a9} 通過(guò)空戰(zhàn)決策信息表的約簡(jiǎn)得到區(qū)分決策屬性所需最小條件屬性集合, 對(duì)應(yīng)著空戰(zhàn)最小決策規(guī)則知識(shí), 計(jì)算共得到83條規(guī)則, 圖 8為基于平行坐標(biāo)圖的部分規(guī)則可視化。
圖8 空戰(zhàn)決策規(guī)則可視化 Fig.8 Visualization of air combat decision rules 4.4 構(gòu)建空戰(zhàn)決策規(guī)則知識(shí)模糊邏輯推理系統(tǒng) 進(jìn)行空戰(zhàn)決策知識(shí)推理之前需要將態(tài)勢(shì)信息等清晰量模糊化, 將觀測(cè)量映射為模糊集合。根據(jù)基于MDLP劃分的切分點(diǎn)區(qū)間設(shè)計(jì)模糊隸屬度函數(shù)能夠有效地決策屬性對(duì)屬性遞歸分割的影響。選擇高斯型隸屬函數(shù), 能夠體現(xiàn)人類判斷的思維方式。 高斯函數(shù)的中心點(diǎn)c為鄰近區(qū)分點(diǎn)的中心點(diǎn), 曲線的寬度根據(jù)區(qū)分點(diǎn)區(qū)間長(zhǎng)度來(lái)設(shè)定, 圖 9為角度威脅模糊隸屬度函數(shù), 圖 10為模糊規(guī)則瀏覽器。
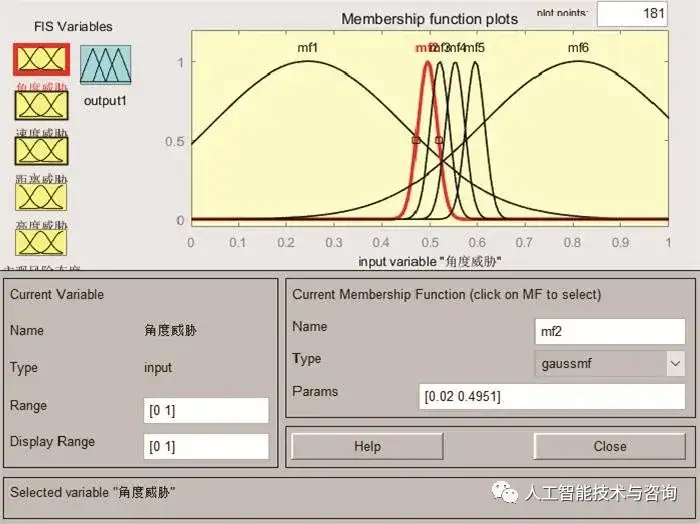
圖9 角度威脅模糊隸屬度函數(shù) Fig.9 Angle threat fuzzy membership function

圖10 模糊規(guī)則瀏覽器 Fig.10 Fuzzy rules browser 4.5 空戰(zhàn)決策知識(shí)應(yīng)用 將構(gòu)建的空戰(zhàn)決策規(guī)則知識(shí)模糊推理系統(tǒng)應(yīng)用到空戰(zhàn)對(duì)抗過(guò)程中, 驗(yàn)證方法的有效性。 情況 1 目標(biāo)作左轉(zhuǎn)彎?rùn)C(jī)動(dòng), 初始時(shí)刻載機(jī)尾后接敵 載機(jī)的初始位置為(0, 0, 5 000)m, 速度為350 m/s, 航跡傾角為0°, 航跡偏角為-120°, 目標(biāo)的初始位置為(30 000, 30 000, 5 000)m, 速度為350 m/s, 航跡傾角為0°, 航跡偏角為-120°, 空戰(zhàn)對(duì)抗軌跡如圖 11所示, 載機(jī)機(jī)動(dòng)決策指令如圖 12所示, 基于參考文獻(xiàn)[8]中態(tài)勢(shì)評(píng)估模型計(jì)算出的態(tài)勢(shì)變化情況如圖 13所示。
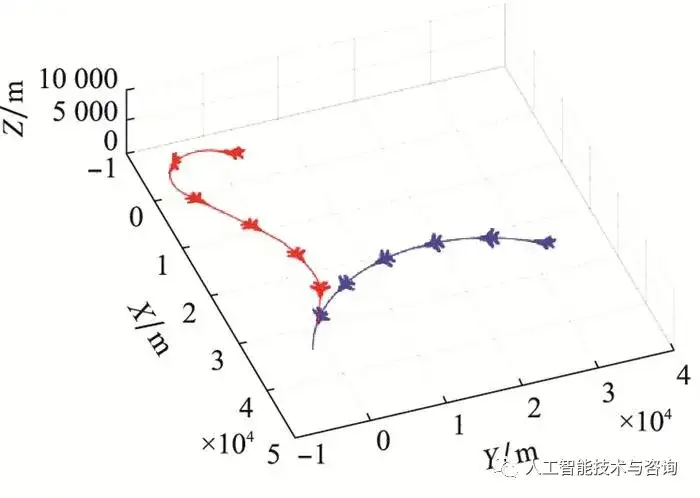
圖11 空戰(zhàn)對(duì)抗軌跡 Fig.11 Air combat trajectory
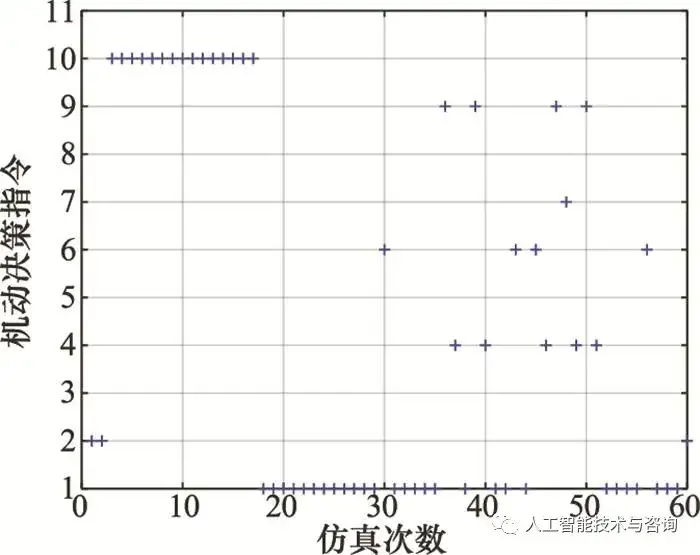
圖12 情況1時(shí)載機(jī)機(jī)動(dòng)決策指令 Fig.12 Our fighter's maneuver decision instruction in case 1
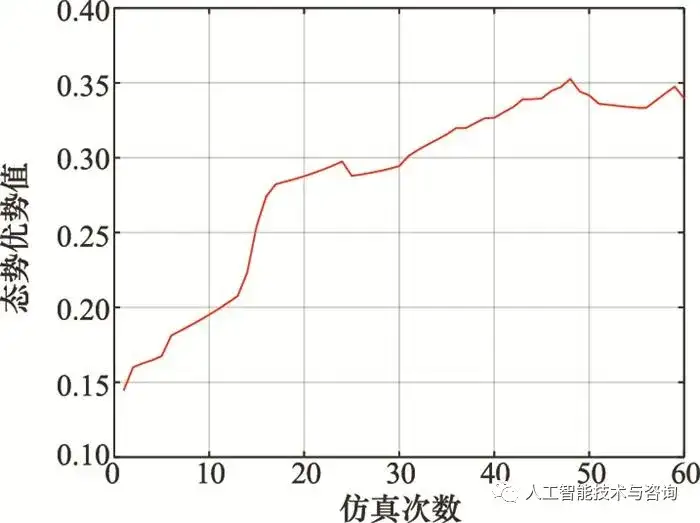
圖13 情況1時(shí)載機(jī)相對(duì)態(tài)勢(shì)優(yōu)勢(shì) Fig.13 Relative situation advantage of our fighter in case 1 從圖 10~圖 13可以看出, 當(dāng)目標(biāo)處于載機(jī)側(cè)后方時(shí), 載機(jī)處于態(tài)勢(shì)劣勢(shì), 載機(jī)進(jìn)行加速前飛以及左轉(zhuǎn)彎?rùn)C(jī)動(dòng)正向接敵, 并且結(jié)合進(jìn)行右爬升、爬升以及右俯沖占據(jù)最佳高度, 繞至目標(biāo)后方并形成對(duì)目標(biāo)的尾追態(tài)勢(shì), 獲取態(tài)勢(shì)相對(duì)優(yōu)勢(shì)。 情況 2 目標(biāo)作蛇形機(jī)動(dòng), 初始時(shí)刻載機(jī)正面接敵 載機(jī)的初始位置為(0, 0, 5 000)m, 速度為350 m/s, 航跡傾角為0°, 航跡偏角為60°, 目標(biāo)的初始位置為(30 000, 30 000, 5 000)m, 速度為350 m/s, 航跡傾角為0°, 航跡偏角為-90°, 空戰(zhàn)對(duì)抗軌跡、載機(jī)機(jī)動(dòng)決策指令以及態(tài)勢(shì)變化情況如圖 14~圖 16所示。
圖14 空戰(zhàn)對(duì)抗軌跡 Fig.14 Air combat trajectory
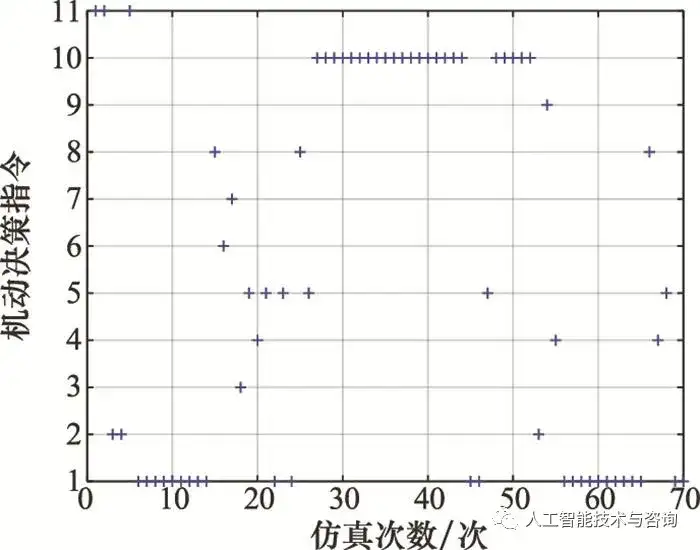
圖15 情況2時(shí)載機(jī)機(jī)動(dòng)決策指令 Fig.15 Our fighter's maneuver decision instruction in case 2
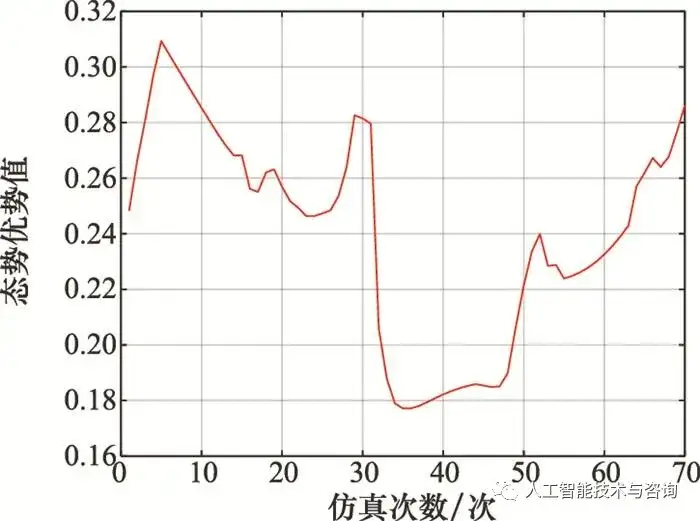
圖16 情況2時(shí)載機(jī)相對(duì)態(tài)勢(shì)優(yōu)勢(shì) Fig.16 Relative situation advantage of our fighter in case 2 從圖 14~圖 16可以看出, 初始階段載機(jī)與目標(biāo)處于迎頭態(tài)勢(shì), 載機(jī)與目標(biāo)均可采用側(cè)向迂回接敵的策略, 載機(jī)加速前飛以及右轉(zhuǎn)彎?rùn)C(jī)動(dòng), 隨著空戰(zhàn)距離的縮進(jìn), 載機(jī)的相對(duì)態(tài)勢(shì)優(yōu)勢(shì)值逐漸減小, 在迎頭階段未分出勝負(fù)情況下, 載機(jī)與目標(biāo)都會(huì)進(jìn)行轉(zhuǎn)彎?rùn)C(jī)動(dòng), 目的是繞至對(duì)方后方形成尾追態(tài)勢(shì), 載機(jī)采用大過(guò)載機(jī)動(dòng), 連續(xù)左轉(zhuǎn)彎, 迅速繞至目標(biāo)后方形成尾追態(tài)勢(shì), 重新獲取空戰(zhàn)態(tài)勢(shì)相對(duì)優(yōu)勢(shì)。 本文構(gòu)建的空戰(zhàn)決策知識(shí)屬于單步?jīng)Q策, 是根據(jù)當(dāng)前戰(zhàn)場(chǎng)態(tài)勢(shì)事實(shí)性知識(shí)在飛行員主觀因素影響下得出的單步?jīng)Q策方案, 提取的空戰(zhàn)決策規(guī)則知識(shí)是基于1Vs1空戰(zhàn)仿真案例, 適用于1Vs1條件下飛行員當(dāng)前時(shí)刻機(jī)動(dòng)動(dòng)作決策提示或者1Vs1條件下自主空戰(zhàn)機(jī)動(dòng)動(dòng)作選擇。 5 結(jié)論 本文從空戰(zhàn)決策知識(shí)的生成與表示出發(fā), 在全面考慮空戰(zhàn)場(chǎng)決策影響因素基礎(chǔ)上, 研究了空戰(zhàn)決策知識(shí)的生成與表示方法; 由于戰(zhàn)訓(xùn)數(shù)據(jù)存在噪聲數(shù)據(jù)以及連續(xù)屬性數(shù)據(jù)難以滿足數(shù)據(jù)挖掘算法離散度量的要求, 應(yīng)用了數(shù)據(jù)離群點(diǎn)檢測(cè)以及連續(xù)屬性離散化算法, 均能達(dá)到較好的數(shù)據(jù)預(yù)處理效果; 基于預(yù)處理后的戰(zhàn)訓(xùn)數(shù)據(jù), 提出了一種空戰(zhàn)最小決策規(guī)則提取方法以及空戰(zhàn)決策知識(shí)的應(yīng)用推理方法。通過(guò)仿真驗(yàn)證分析, 本文提出的空戰(zhàn)決策知識(shí)構(gòu)建方法能夠應(yīng)用在指導(dǎo)飛行員1Vs1空戰(zhàn)決策以及1Vs1無(wú)人作戰(zhàn)方面, 對(duì)于解決戰(zhàn)訓(xùn)大數(shù)據(jù)處理與應(yīng)用、空戰(zhàn)知識(shí)挖掘問(wèn)題具有借鑒意義, 后續(xù)將進(jìn)一步研究空戰(zhàn)決策規(guī)則知識(shí)的精度與適用度問(wèn)題以及多機(jī)協(xié)同下空戰(zhàn)決策知識(shí)的構(gòu)建問(wèn)題。
審核編輯:符乾江



























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論