的應(yīng)用。 一、重載型編碼器的基本原理重載型編碼器的核心部分是由一個(gè)旋轉(zhuǎn)的編碼盤和一組光電檢測(cè)器構(gòu)成。當(dāng)物體通過時(shí),編碼盤會(huì)隨著物體運(yùn)動(dòng)而轉(zhuǎn)動(dòng),光電檢測(cè)器
2024-03-11 13:58:27
和編碼器軸端用一個(gè)塑料件的空心圓柱連接,我不太清楚這個(gè)塑料圓柱具體叫什么,兩者連接確保轉(zhuǎn)速一致,現(xiàn)在有一個(gè)問題,不知道是編碼器質(zhì)量問題還是安裝的問題,就是在電機(jī)旋轉(zhuǎn)的時(shí)候編碼器有一點(diǎn)偏離,沒有和電機(jī)同心
2024-03-06 17:34:21
差分編碼器信號(hào)通常用于測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)或線性位置,接收差分編碼器信號(hào)的PLC(可編程邏輯控制器)需要進(jìn)行相應(yīng)的信號(hào)處理才能正確讀取并理解編碼器的輸出。下面是將差分編碼器信號(hào)接入PLC的一般步驟: 1.
2024-03-05 08:42:49 80
80 
如果可以觀察到編碼器的電纜或接線端子,可以根據(jù)其連接方式來初步判斷輸出類型。PNP輸出的編碼器通常會(huì)有三根線(電源正極、負(fù)極、信號(hào)線),而NPN輸出的編碼器通常只有兩根線(信號(hào)線和電源負(fù)極)。
2024-02-26 15:11:09683 差分編碼器信號(hào)通常用于測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)或線性位置,接收差分編碼器信號(hào)的PLC(可編程邏輯控制器)需要進(jìn)行相應(yīng)的信號(hào)處理才能正確讀取并理解編碼器的輸出。
2024-02-26 14:43:57474 按照編碼器支持的分辨率可以把編碼器分成標(biāo)清編碼器、高清編碼器、全高清編碼器,分辨率越高幀率越高視頻就越清楚。 1.編碼器的分辨率是什么意思 編碼器的分辨率是指編碼器以每旋轉(zhuǎn)360度提供
2024-02-21 18:07:31492 
編碼器零點(diǎn)位置怎么看 要確定編碼器的零點(diǎn)位置,可以通過以下幾種方式進(jìn)行觀察: 1. 物理標(biāo)記點(diǎn):一些編碼器在其旋轉(zhuǎn)軸上具有專門的物理標(biāo)記點(diǎn),例如凹槽或凸起。通過觀察軸上的標(biāo)記點(diǎn),可以確定零點(diǎn)位置
2024-02-18 18:28:19729 
在本教程中,您將學(xué)習(xí)如何將增量旋轉(zhuǎn)編碼器與Arduino連接,以讀取旋鈕的運(yùn)動(dòng)。這對(duì)于在機(jī)器人和其他應(yīng)用程序中創(chuàng)建用戶界面或讀取機(jī)械位置非常有用。
2024-02-11 10:00:00253 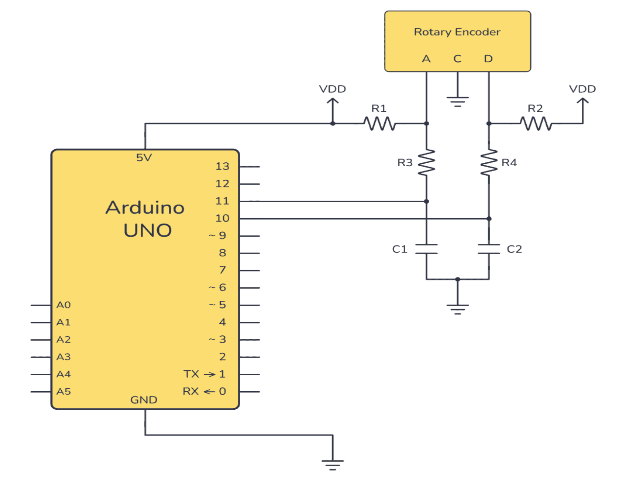
旋轉(zhuǎn)編碼器是用于測(cè)量軸或軸旋轉(zhuǎn)的組件。它們通常用于音頻設(shè)備、DIY 游戲控制器中的音量旋鈕,或用作不同 Arduino 或 Raspberry Pi 項(xiàng)目的輸入設(shè)備。
2024-02-11 09:53:00597 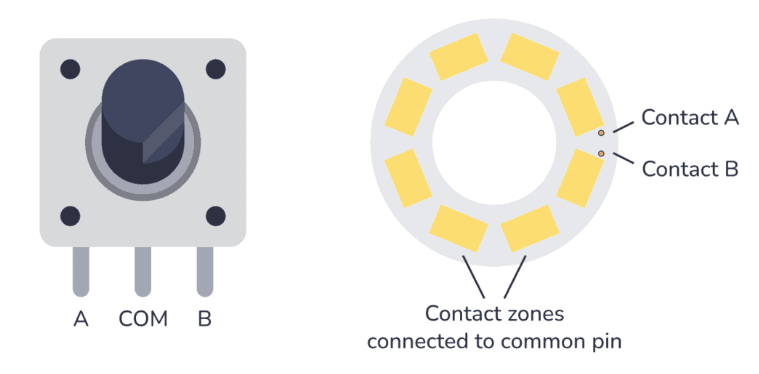
的7種常見故障及相應(yīng)的解決方法,以幫助讀者更好地應(yīng)對(duì)和解決編碼器故障。 一、軸承故障 軸承是編碼器的重要組成部分,負(fù)責(zé)支撐旋轉(zhuǎn)軸和傳感元件,如果軸承出現(xiàn)故障,將會(huì)影響編碼器的正常運(yùn)行。常見的軸承故障有軸承損壞、軸承過熱等。
2024-01-26 14:56:41884 編碼器(Encoder)是將輸入數(shù)據(jù)轉(zhuǎn)化為特定編碼表示的一種技術(shù)。對(duì)于不同類型的編碼器,評(píng)判其好壞可以從多個(gè)方面進(jìn)行考量,包括編碼質(zhì)量、速度、模型結(jié)構(gòu)等。 編碼器的原理主要基于自動(dòng)編碼器
2024-01-23 10:58:07414 或北極極化,主要取決于應(yīng)用程序需要什么樣的輸出信號(hào)。磁性編碼器的工作原理:當(dāng)標(biāo)尺旋轉(zhuǎn)或移動(dòng)時(shí),它會(huì)通過讀頭。因?yàn)樽x頭內(nèi)部有一組傳感器,這種傳感器可以檢測(cè)到每個(gè)磁條通過
2024-01-22 11:24:40270 
編碼器5條線的含義及作用:A相輸出是編碼器最基本的信號(hào)之一,它代表著旋轉(zhuǎn)軸每轉(zhuǎn)動(dòng)一個(gè)單位所產(chǎn)生的脈沖數(shù)。一般來說,A相輸出是一個(gè)方波信號(hào),在每個(gè)周期內(nèi)都會(huì)有一個(gè)上升沿和一個(gè)下降沿。B相輸出也是編碼器
2024-01-22 10:59:58412 
一些編碼器會(huì)在其旋轉(zhuǎn)軸上標(biāo)記一個(gè)特殊的標(biāo)記點(diǎn),例如一個(gè)凹槽或凸起。通過在編碼器旋轉(zhuǎn)到特定位置時(shí)對(duì)標(biāo)記點(diǎn)進(jìn)行檢測(cè),可以確定零位。
2024-01-18 14:49:40219 伺服電機(jī)編碼器是一種關(guān)鍵的反饋裝置,用于測(cè)量和控制電機(jī)的轉(zhuǎn)速和位置。在選擇伺服電機(jī)編碼器時(shí),常常面臨一個(gè)選擇:使用磁電編碼器還是光電編碼器。接下來將從幾個(gè)關(guān)鍵方面比較這兩種類型的編碼器,以幫助您做出更明智的選擇。
2024-01-18 10:29:02462 編碼器是一種將機(jī)械運(yùn)動(dòng)轉(zhuǎn)換為數(shù)字電信號(hào)的傳感器。當(dāng)駕駛員想要控制電機(jī)旋轉(zhuǎn)時(shí),U、V、W三相電氣輸出驅(qū)動(dòng)電機(jī)運(yùn)行。為了將電機(jī)轉(zhuǎn)到某個(gè)位置或角度,我們將此位置稱為目標(biāo)值。我們需要知道此時(shí)電機(jī)轉(zhuǎn)動(dòng)的幅度
2024-01-17 17:02:12326 
今天公司內(nèi)一臺(tái)安川Σ伺服電機(jī)編碼器因?yàn)樽兯傧漭S密封出現(xiàn)問題,導(dǎo)致機(jī)油漏進(jìn)伺服電機(jī)尾部的編碼器內(nèi),導(dǎo)致編碼器報(bào)錯(cuò),伺服不能工作,對(duì)于這種情況編碼器能修復(fù)嗎,機(jī)油應(yīng)該是絕緣的。有沒有對(duì)于這個(gè)情況的維修案例。
伺服電機(jī)問題不大,因?yàn)闄C(jī)油是絕緣的,打開伺服電機(jī)清潔后應(yīng)該就可以使用了。
2024-01-10 07:26:49
絕對(duì)值編碼器用于定位,單方向旋轉(zhuǎn),位置偏差越來越大。
編碼器用來定位,定位是循環(huán)的,不同值對(duì)應(yīng)不同位置例:1-2-3-4-1
不同位置錄入不同編碼器數(shù)值。剛才是運(yùn)轉(zhuǎn)幾圈,位置比較準(zhǔn)確,
當(dāng)單方向運(yùn)轉(zhuǎn)好多圈之后,位置偏移越來越大,求大家?guī)兔Ψ治鱿聠栴}所在!!!!
2024-01-09 11:50:55
? ? ? 旋轉(zhuǎn)編碼器檢測(cè)是數(shù)控機(jī)床伺服體系的重要組成部分,它起著檢測(cè)各操控軸的位移和速度的效果,它把檢測(cè)到的信號(hào)反應(yīng)回去,構(gòu)成閉環(huán)體系。丈量方法可分為直接丈量和間接丈量:直接丈量即是對(duì)機(jī)床的直線
2024-01-07 08:38:30144 
作者:Jeff Smoot 是 CUI Devices 應(yīng)用工程和運(yùn)動(dòng)控制部門副總裁 投稿人:DigiKey 北美編輯 本文將深入探討面板安裝旋轉(zhuǎn)編碼器的電氣工程應(yīng)用。這些器件本質(zhì)上屬于換能器,可將
2024-01-01 17:30:00398 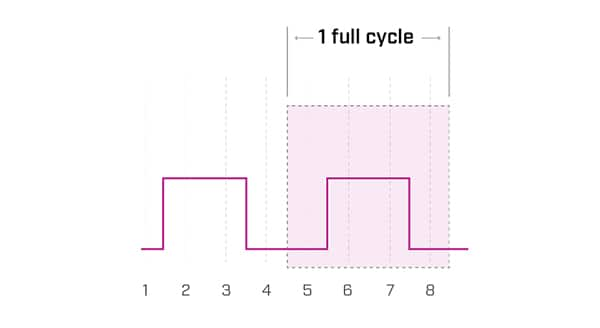
伺服電機(jī)的編碼器能否更換?因電機(jī)軸壞,需要拆下加工,故需要把編碼器拆下來!需要注意哪些問題、
2023-12-26 08:18:16
編碼器分為旋轉(zhuǎn)編碼器和線性編碼器兩種。旋轉(zhuǎn)編碼器用于檢測(cè)旋轉(zhuǎn)位置和速度,而線性編碼器用于檢測(cè)直線位置和速度。
2023-12-22 09:20:04380 
通過直流調(diào)速器(590)里的參數(shù)可以知道編碼器的方向,如果反了,將A、B相信號(hào)反一下就行了,這是平時(shí)我在現(xiàn)場(chǎng)看到別人調(diào)試時(shí)這么做的,請(qǐng)問如果沒有直流調(diào)速器,要怎么判斷編碼器的方向呢?
2023-12-21 07:17:04
POSITALFRABA博思特編碼器是一種先進(jìn)的測(cè)量?jī)x器,其具有高精度和可靠性的旋轉(zhuǎn)位置傳感器。該編碼器采用了先進(jìn)的技術(shù),能夠準(zhǔn)確地測(cè)量物體的位置和運(yùn)動(dòng)情況,并將其轉(zhuǎn)化為數(shù)字信號(hào)輸出。一
2023-12-08 17:14:49
編碼器主要應(yīng)用在人形機(jī)器人的旋轉(zhuǎn)、直線執(zhí)行模組和靈巧手,單特斯拉Optimus編碼器需求量50+,價(jià)值量約為7500元,若在2025年實(shí)現(xiàn)100萬臺(tái)目標(biāo)交付量,有望為編碼器帶來70億級(jí)別的增量市場(chǎng)。
2023-12-08 10:32:17683 編碼器:互補(bǔ)輸出和推挽式輸出的區(qū)別:編碼器是很常見的一種電子元器件,能將旋轉(zhuǎn)位置或線性位置轉(zhuǎn)換成數(shù)字信號(hào)輸出。在編碼器輸出的信號(hào)中,互補(bǔ)輸出和推挽式輸出是兩種比較常見的形式.
2023-11-23 13:53:391024 
我的問題就是更換編碼器后是否真的需要向編碼器中寫信息,若是大家誰有此軟件和操作步驟呢?
2023-11-22 06:16:27
旋轉(zhuǎn)式編碼器可以精確地測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)。它們通常收集關(guān)于繞旋轉(zhuǎn)軸運(yùn)動(dòng)變化的信息。盡管它們非常精確。然而,在為發(fā)動(dòng)機(jī)選擇正確的編碼時(shí),技術(shù)工程師需要考慮對(duì)發(fā)動(dòng)機(jī)性能影響最大的編碼器的五個(gè)主要特性:定位精度、速度穩(wěn)定性、聲音噪聲、功率損耗和帶寬。
2023-11-20 17:46:28298 光電編碼器是一種常用的位置傳感器,光電編碼器通過使用一系列的光柵刻痕和光電傳感器,可以測(cè)量旋轉(zhuǎn)物體或者單一的線性位移,并將其轉(zhuǎn)化成數(shù)字信號(hào)輸出。
2023-11-17 10:49:51311 西門子伺服電機(jī)更換編碼器,要調(diào)整對(duì)齊編碼器,如何對(duì)齊呢?
2023-11-15 07:16:43
旋轉(zhuǎn)編碼器更換步驟第一步,卸開電機(jī)后蓋,編碼器的后蓋。第二步,松開編碼器安裝螺絲。第三步,旋轉(zhuǎn)電機(jī)轉(zhuǎn)子軸,使編碼器轉(zhuǎn)子上的標(biāo)志和編碼器殼上的標(biāo)志重合。第四步,卸下編碼器,注意在裝卸的時(shí)候盡量使用特制
2023-11-12 08:07:20756 
的轉(zhuǎn)速和轉(zhuǎn)向。 霍爾編碼器一般是13線的,就是轉(zhuǎn)一圈每項(xiàng)會(huì)輸出13個(gè)脈沖,這個(gè)精度基本能夠滿足大部分使用場(chǎng)景的要求。 1.2 光電編碼器 打孔碼盤隨電機(jī)進(jìn)行旋轉(zhuǎn)。每當(dāng)光線穿過圓孔,輸出電平就會(huì)改變,如此產(chǎn)生方波,測(cè)量方波的頻率即可測(cè)出電機(jī)
2023-11-10 15:21:47803 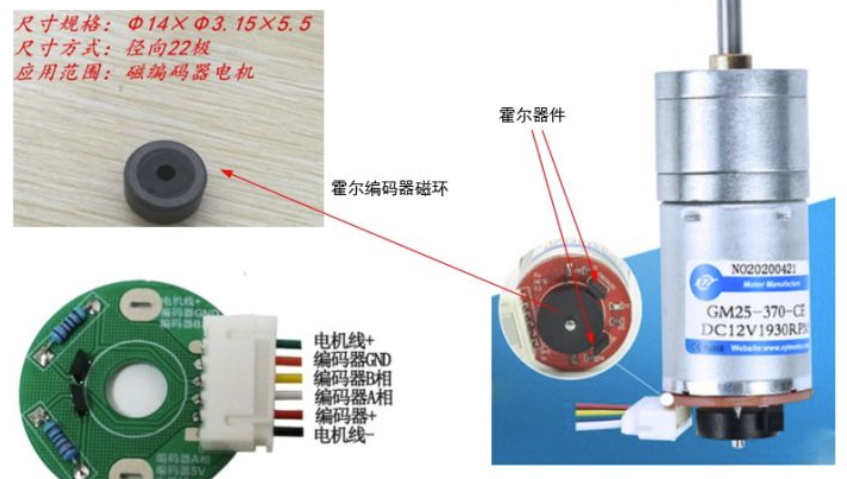
電機(jī)連著主軸,主軸帶個(gè)增量式旋轉(zhuǎn)編碼器,已知編碼器為1600線,主軸直徑為150mm, 主軸為變速轉(zhuǎn)動(dòng),變速后面伸出來的軸同樣是150MM后面帶了一個(gè)轉(zhuǎn)盤為1M。求:
1、主軸的當(dāng)前時(shí)刻轉(zhuǎn)速是多少
2023-11-09 06:17:48
profinet信號(hào)編碼器和profibus信號(hào)編碼器哪個(gè)更好
2023-11-08 13:37:35460 26位多圈絕對(duì)值編碼器是什么?26位多圈絕對(duì)值編碼器是一種用于測(cè)量旋轉(zhuǎn)角度的裝置,它可以提供高精度的角度測(cè)量結(jié)果,而且具有較高的可靠性和穩(wěn)定性。下面我們就介紹26位多圈絕對(duì)值編碼器的結(jié)構(gòu)、工作原理以及應(yīng)用領(lǐng)域。
2023-11-08 11:18:08747 
不太明白帶編碼器的電機(jī)輸出轉(zhuǎn)矩能達(dá)到額定轉(zhuǎn)矩,這個(gè)是怎么判斷或設(shè)置的?
2023-11-02 09:59:31
STM32怎么采樣編碼器信號(hào)?
2023-10-27 06:16:01
多圈編碼器和單圈編碼器區(qū)別:多圈編碼器一般由兩個(gè)或更多個(gè)同心環(huán)構(gòu)成,每一個(gè)環(huán)上都有一個(gè)光電傳感器和一個(gè)光柵盤。當(dāng)軸旋轉(zhuǎn)時(shí),每一個(gè)光柵盤也會(huì)隨之旋轉(zhuǎn),并且通過光電傳感器產(chǎn)生脈沖信號(hào)。因?yàn)槎嗳?b class="flag-6" style="color: red">編碼器具備高精度、高分辨率等特點(diǎn),所以在必須高精度測(cè)量的場(chǎng)合得到了廣泛的應(yīng)用。比如機(jī)床、印刷機(jī)械等行業(yè)。
2023-10-23 14:14:352121 
旋轉(zhuǎn)編碼器有兩種類型-絕對(duì)式和增量式。絕對(duì)編碼器為我們提供旋鈕的精確位置(以度為單位),而增量編碼器報(bào)告軸已移動(dòng)了多少增量。
2023-10-19 17:20:30219 
應(yīng)該怎么通過單片機(jī)來判斷旋轉(zhuǎn)方向
2023-10-16 07:25:24
絕對(duì)式編碼器輸出的位置怎么判斷是否在原點(diǎn)
2023-10-13 07:32:01
在旋轉(zhuǎn)、直線編碼器及磁柵尺中得到廣泛應(yīng)用的兩款產(chǎn)品:“磁性傳感器”及“插補(bǔ)細(xì)分器”。
2023-10-12 18:17:13499 旋轉(zhuǎn)編碼器是一種位置傳感器,可將旋鈕的角位置(旋轉(zhuǎn))轉(zhuǎn)換為用于確定旋鈕旋轉(zhuǎn)方向的輸出信號(hào)。
2023-10-12 16:56:34325 
中斷方式驅(qū)動(dòng)旋轉(zhuǎn)編碼器
本文案例代碼
下載地址
中斷方式驅(qū)動(dòng)旋轉(zhuǎn)編碼器案例代碼
https://www.aw-ol.com/downloads?cat=24
旋轉(zhuǎn)編碼器是一種位置傳感器,可將旋鈕的角
2023-10-12 15:51:29
中斷方式驅(qū)動(dòng)旋轉(zhuǎn)編碼器
本文案例代碼
下載地址
中斷方式驅(qū)動(dòng)旋轉(zhuǎn)編碼器案例代碼
https://www.aw-ol.com/downloads?cat=24
旋轉(zhuǎn)編碼器是一種位置傳感器,可將旋鈕的角
2023-10-12 15:51:28
霍爾編碼器和光電編碼器有什么區(qū)別
2023-10-12 08:04:53
怎么用旋轉(zhuǎn)編碼器獲取一個(gè)物體的加速度
2023-10-11 07:09:22
增量式編碼器怎么判斷位置已經(jīng)轉(zhuǎn)動(dòng)了一圈
2023-10-09 07:23:03
15年左右行業(yè)內(nèi)開始掀起風(fēng)磁編碼器替代光電編碼器,而且在22年的時(shí)候國(guó)內(nèi)幾家磁編發(fā)展迅速取得了很大的成績(jī),可是23年開始隨著光電編碼成本的下調(diào)技術(shù)的革新,又有客戶回歸到用光電的技術(shù)。
是不是現(xiàn)在達(dá)到一個(gè)平衡點(diǎn)了?還是說磁編還有突破的空間?
2023-09-26 13:03:43
包含詳細(xì)說明+代碼在本教程中,我們將學(xué)習(xí)旋轉(zhuǎn)編碼器的怎樣工作的,以及如何使它與Arduino配合使用。旋轉(zhuǎn)編碼器是一種位置傳感器,用于確定旋轉(zhuǎn)軸的角度位置。
2023-09-26 07:52:23
伺服電機(jī)編碼器原理 伺服編碼器這個(gè)基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號(hào),除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機(jī)多數(shù)為同步電機(jī)
2023-09-25 14:07:17974 接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對(duì)式兩類。編碼器根據(jù)其旋轉(zhuǎn)方式可以分為多圈編碼器和單圈編碼器。多圈編碼器在其主軸上擁有多個(gè)磁場(chǎng)傳感器或光柵
2023-09-22 08:08:551190 特定功能的命令。市場(chǎng)上最早的編碼器主要是解析器。旋轉(zhuǎn)變壓器是一種電磁傳感器,也稱為同步旋轉(zhuǎn)變壓器。它是一種測(cè)量角度的小型交流電機(jī),用于測(cè)量旋轉(zhuǎn)物體的軸角位移和角速度
2023-09-15 08:09:033374 在速度、距離和方向反饋系統(tǒng)中,編碼器必須充分利用其功能。簡(jiǎn)而言之,編碼器主要檢測(cè)和控制可用于調(diào)整或監(jiān)控傳輸?shù)倪\(yùn)動(dòng)傳感器。編碼器:通常用于精確測(cè)量線性或旋轉(zhuǎn)運(yùn)動(dòng)。不同的應(yīng)用場(chǎng)景因設(shè)計(jì)和通信方式而異
2023-09-10 08:08:441295 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場(chǎng)上
2023-08-25 08:09:031589 一種將角位移或者角速度轉(zhuǎn)換成一連串電數(shù)字脈沖的旋轉(zhuǎn)式傳感器,我們可以通過編碼器測(cè)量到位移或者速度信息。編碼器通常由一個(gè)旋轉(zhuǎn)部分和一個(gè)固定部分組成,旋轉(zhuǎn)部分隨著被測(cè)量的物體進(jìn)行旋轉(zhuǎn),固定部分則保持不動(dòng)。當(dāng)旋轉(zhuǎn)部分發(fā)生旋轉(zhuǎn)時(shí),編碼器會(huì)產(chǎn)生一系列的電數(shù)字脈沖信號(hào),這些脈沖信號(hào)可以用來確定旋轉(zhuǎn)角度或角速度。
2023-08-21 11:50:005002 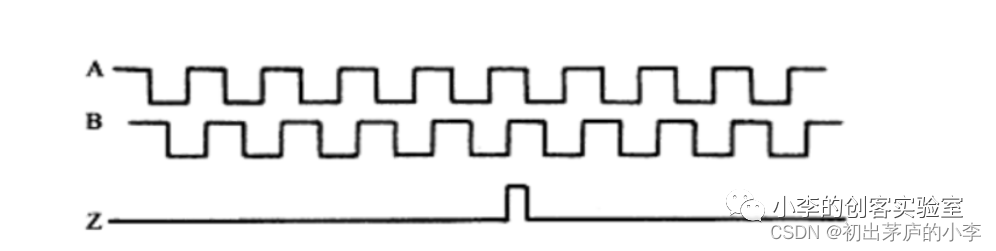
絕對(duì)值編碼器是一種用于測(cè)量旋轉(zhuǎn)位置或線性位移的傳感器。與增量編碼器不同,絕對(duì)值編碼器可以提供特定位置的唯一輸出值,而不需要進(jìn)行校準(zhǔn)。這使得絕對(duì)值編碼器在需要高精度位置測(cè)量的應(yīng)用中非常有用,例如機(jī)器人、自動(dòng)化系統(tǒng)和醫(yī)療設(shè)備。
2023-07-26 09:53:329946 該怎么判斷單片機(jī)是否起振?如何判斷晶振好壞?
2023-07-21 09:15:441038 
編碼器好壞怎么來判斷:判斷一個(gè)編碼器的好壞需要綜合考慮其基本參數(shù)、測(cè)試數(shù)據(jù)、可靠性和耐久性等因素。在選擇和使用編碼器時(shí),應(yīng)了解其基本特性,進(jìn)行科學(xué)合理的測(cè)試和比較,并在使用中進(jìn)行積極的維護(hù)和保養(yǎng),以確保其能夠穩(wěn)定可靠地工作,為機(jī)械系統(tǒng)的正常運(yùn)行提供有力支持。
2023-07-17 15:06:492774 
我們知道編碼器的種類有很多,什么增量式編碼器、絕對(duì)值編碼器、光電編碼器、旋轉(zhuǎn)編碼器等等。
2023-07-13 14:26:194176 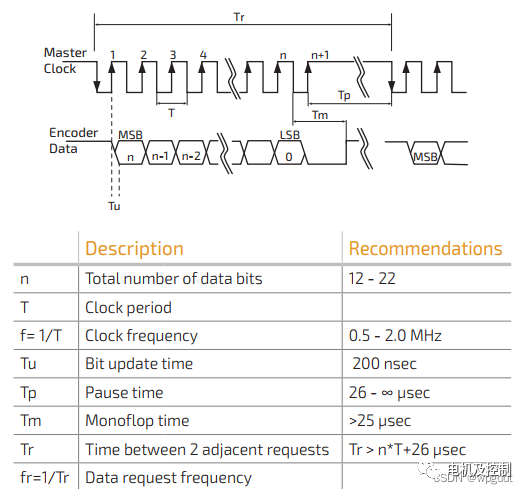
光學(xué)式絕對(duì)型編碼器中也有一個(gè)會(huì)和主軸同步旋轉(zhuǎn)的圓編碼盤,盤中有分為許多同心圓狀的透明及不透明的區(qū)域,盤的兩側(cè)分別有光源及光傳感器數(shù)組,光源穿過編碼盤后,被光傳感器采集,采集的信息直接代表了轉(zhuǎn)軸的位置;
2023-07-09 16:07:102441 
增量式編碼器和絕對(duì)值編碼器有哪些區(qū)別?增量式編碼器通過對(duì)變化量進(jìn)行計(jì)數(shù)來測(cè)量位置變化,而絕對(duì)值編碼器可提供實(shí)際位置值。因此,增量式編碼器對(duì)于測(cè)量無限循環(huán)的運(yùn)動(dòng)比較有用,因?yàn)樗鼈兛梢允褂糜?jì)數(shù)器來跟蹤旋轉(zhuǎn)次數(shù)和速度。相比之下,絕對(duì)值編碼器適用于任務(wù)需要直接獲得位置信息的情景,如機(jī)器人運(yùn)動(dòng)。
2023-07-05 13:34:282245 
伺服電機(jī)編碼器 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2023-06-26 14:01:01899 電子發(fā)燒友網(wǎng)站提供《帶有旋轉(zhuǎn)編碼器和五個(gè)獨(dú)立按鍵開關(guān)的宏鍵盤.zip》資料免費(fèi)下載
2023-06-15 10:49:10 0
0 光電編碼器是什么?光電編碼器原理應(yīng)用與優(yōu)缺點(diǎn):光電編碼器是一種常用的位置傳感器,其特性主要包括高精度、高分辨率、穩(wěn)定性好等。光電編碼器通過使用一系列的光柵刻痕和光電傳感器,可以測(cè)量旋轉(zhuǎn)物體或者單一
2023-06-14 09:13:052051 
旋轉(zhuǎn)編碼器是一種常見的傳感器,它能夠通過檢測(cè)旋轉(zhuǎn)軸的轉(zhuǎn)動(dòng)實(shí)現(xiàn)實(shí)時(shí)位置監(jiān)測(cè)與控制。它具有高精度、長(zhǎng)壽命、可重復(fù)性高、體積小等特點(diǎn),因此在機(jī)器人控制、自動(dòng)化生產(chǎn)、醫(yī)療設(shè)備、輪廓檢測(cè)等方面被廣泛應(yīng)用。
2023-06-09 10:16:351606 
我想用陀螺儀(gy-521)和旋轉(zhuǎn)編碼器(ky-040)。但是當(dāng)我開始連接它時(shí),我注意到人們通常將它連接到相同的引腳(D1 和 D2)。我想知道是否可以將兩個(gè)模塊與 esp8266 一起使用,如果可能的話如何連接它們。
2023-06-05 13:44:47
增量式編碼器在實(shí)際應(yīng)用中還是很常見。stm32的定時(shí)器帶的也有編碼器模式。所用的編碼器是有ABZ三相,其中ab相是用來計(jì)數(shù),z相輸出零點(diǎn)信號(hào)。AB相根據(jù)旋轉(zhuǎn)的方向不同,輸出的波形如下圖所示:
2023-06-01 14:36:103623 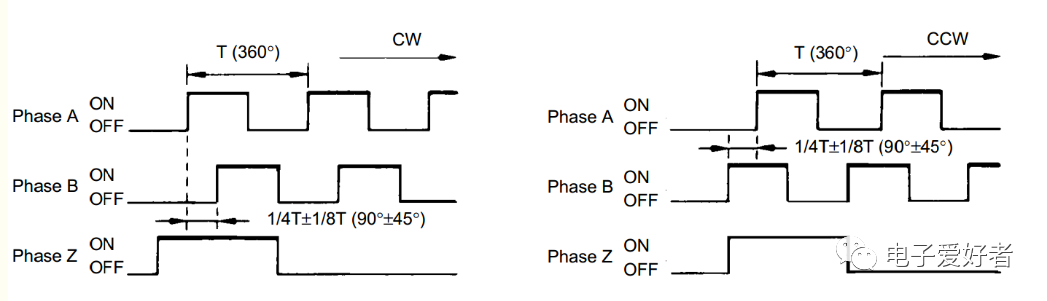
摘要:自動(dòng)調(diào)諧在發(fā)射機(jī)自動(dòng)化中發(fā)揮著重要的作用,能否精準(zhǔn)調(diào)諧關(guān)系著發(fā)射機(jī)能否運(yùn)行在最佳工作狀態(tài),文章主要針對(duì)150KW短波發(fā)射機(jī)步進(jìn)電機(jī)中旋轉(zhuǎn)編碼器的不穩(wěn)定問題,提出合理解決方案,確保自動(dòng)調(diào)諧系統(tǒng)的穩(wěn)定性。
2023-05-31 17:05:481 什么是拉繩編碼器?拉繩編碼器是一種廣泛應(yīng)用于工業(yè)領(lǐng)域的傳感器裝置。它的作用是將機(jī)械運(yùn)動(dòng)轉(zhuǎn)化為電信號(hào),以便測(cè)量和監(jiān)測(cè)各種參數(shù)。拉繩編碼器的工作原理基于拉繩與編碼器之間的相互作用。拉繩通過連接到被測(cè)物體
2023-05-29 09:23:211990 
旋轉(zhuǎn)編碼器是什么?淺讀旋轉(zhuǎn)編碼器工作原理與特點(diǎn)及應(yīng)用:旋轉(zhuǎn)編碼器是一種常見的傳感器,它能夠通過檢測(cè)旋轉(zhuǎn)軸的轉(zhuǎn)動(dòng)實(shí)現(xiàn)實(shí)時(shí)位置監(jiān)測(cè)與控制。它具有高精度、長(zhǎng)壽命、可重復(fù)性高、體積小等特點(diǎn),因此在機(jī)器人控制、自動(dòng)化生產(chǎn)、醫(yī)療設(shè)備、輪廓檢測(cè)等方面被廣泛應(yīng)用。
2023-05-29 09:21:152027 
在不同的工作領(lǐng)域和工作中,需要使用對(duì)應(yīng)的工具和產(chǎn)品。在處理具有旋轉(zhuǎn)角度編碼器的工作任務(wù)時(shí),了解所需工具的類型是必要的。除了絕對(duì)值編碼器外,還有增量式編碼器,二者有什么區(qū)別呢?有什么特征、適合什么樣的應(yīng)用呢?這邊文章給您答案
2023-05-26 10:51:401705 編碼器種類及型號(hào):最常見的編碼器類型是旋轉(zhuǎn)編碼器和線性編碼器。旋轉(zhuǎn)編碼器通常用于測(cè)量機(jī)器人的關(guān)節(jié)位置,以及測(cè)量車輛和船只的轉(zhuǎn)向角度。線性編碼器通常用于測(cè)量運(yùn)動(dòng)平臺(tái)的位置和速度。旋轉(zhuǎn)編碼器和線性編碼器可以分為絕對(duì)式和增量式編碼器。絕對(duì)式編碼器可以直接讀取位置信息,而增量式編碼器則需要計(jì)算位置信息。
2023-05-18 11:15:003455 
編碼器是什么?編碼器有哪些分類及應(yīng)用;編碼器是什么?在數(shù)字信號(hào)處理和通信系統(tǒng)中,編碼器是一種重要的設(shè)備,用于將原始數(shù)據(jù)轉(zhuǎn)換為字符序列或二進(jìn)制碼序列。編碼器是一種可以同時(shí)測(cè)量物體位置和方向的蒿精度
2023-05-18 11:08:473133 
,CLK和DT引腳用來計(jì)數(shù)和判斷正反轉(zhuǎn),SW引腳用來復(fù)位并計(jì)數(shù)清零。KY-040旋轉(zhuǎn)編碼器可以通過旋轉(zhuǎn)計(jì)數(shù)正方向和反方向轉(zhuǎn)動(dòng)過程中輸出脈沖的次數(shù),旋轉(zhuǎn)計(jì)數(shù)不像電位計(jì),這種轉(zhuǎn)動(dòng)計(jì)數(shù)是沒有限制的。配合旋轉(zhuǎn)編碼器上的按鍵,可以復(fù)位到初始狀態(tài),即從0開始計(jì)數(shù)。
2023-05-15 16:31:41
增量型編碼器與絕對(duì)值型編碼器怎么選擇?在進(jìn)行編碼器選擇時(shí),增量型編碼器和絕對(duì)值型編碼器是兩種常見的選擇。增量型編碼器是一種基于脈沖計(jì)數(shù)的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優(yōu)點(diǎn)
2023-05-08 11:28:331340 
編碼器,是一種用來測(cè)量機(jī)械旋轉(zhuǎn)或位移的傳感器。這種傳感器能夠測(cè)量機(jī)械部件在旋轉(zhuǎn)或直線運(yùn)動(dòng)時(shí)的位移位置或速度等信息,并將其轉(zhuǎn)換成一系列電信號(hào)。定時(shí)器可配置成編碼器模式,本章教程主要對(duì)定時(shí)器編碼器模式
2023-05-06 15:48:48
我是 NodeMCU 硬件的新手,我想知道是否可以使用旋轉(zhuǎn)編碼器進(jìn)行這種菜單滾動(dòng)v=3OGU- fXRD1E I沒有找到任何示例,只有沒有交互的純顯示。
2023-05-04 06:00:50
增量型編碼器旋轉(zhuǎn)一圈提供一個(gè)固定數(shù)量的脈沖,速度是通過單位時(shí)間內(nèi)測(cè)量的脈沖數(shù)計(jì)算。為了測(cè)量角度和位置,通常是從一個(gè)起始的參考點(diǎn)開始計(jì)數(shù)。
2023-04-27 10:20:501797 、有機(jī)實(shí)芯絕對(duì)值編碼器
有機(jī)實(shí)芯絕對(duì)值編碼器是一種新型絕對(duì)值編碼器,它是用加熱塑壓的方法,將有機(jī)電阻粉壓在絕緣體的凹槽(義:物體表面上凹下的槽)內(nèi)。多圈絕對(duì)值編碼器如果要測(cè)量旋轉(zhuǎn)超過360度范圍
2023-04-26 09:21:09
旋轉(zhuǎn)編碼器可通過旋轉(zhuǎn)來計(jì)數(shù)(即可從0開始不但加一或者減一,計(jì)數(shù)范圍沒有限制),實(shí)現(xiàn)精確數(shù)字的調(diào)節(jié)。電機(jī)角度等需要特別精確調(diào)節(jié)的元器件可以利用編碼器來實(shí)現(xiàn)精細(xì)控制。配合旋轉(zhuǎn)編碼器上的按鍵,可以復(fù)位到
2023-04-25 16:14:44
單圈絕對(duì)值編碼器 PVS78E Mining 旋轉(zhuǎn)編碼是用于檢測(cè)旋轉(zhuǎn)角度及其衍生機(jī)械參數(shù)的一類傳感器,包括速度和加速度等,可檢測(cè)旋轉(zhuǎn)、直線等傳動(dòng)運(yùn)動(dòng)。由于應(yīng)用廣泛,現(xiàn)代旋轉(zhuǎn)編碼器可見于諸多機(jī)械
2023-04-25 14:16:582245 共模電感作為一款應(yīng)用率非常高的電感產(chǎn)品,常規(guī)共模電感具有性能穩(wěn)定的特點(diǎn),常規(guī)封裝的共模電感基本上可以滿足大家的使用需求。很多人好奇應(yīng)該如何去判斷共模電感的好壞?因?yàn)檫@畢竟關(guān)乎到應(yīng)用的問題。本篇我們
2023-04-25 09:29:504 其實(shí)也是一種傳感器,測(cè)量旋轉(zhuǎn)或者位移,并將其轉(zhuǎn)換成電信號(hào)用于確定位置、計(jì)數(shù)、速度或方向。 ? 影響編碼器性能的連接件 ? 按照連接方式不同,目前有兩種類型的編碼器,一種是導(dǎo)線型編碼器,通過電纜直接連接編碼器的接線,
2023-04-25 01:03:001094 ,在編碼器的每一個(gè)位置,通過讀取每道刻線的通、暗,獲得一組從2的零次方到2的n-1次方的唯一的2進(jìn)制編碼(格雷碼),這就稱為n位絕對(duì)編碼器,這樣的編碼器是由光電碼盤進(jìn)行記憶的。絕對(duì)編碼器在一個(gè)特定的旋轉(zhuǎn)
2023-04-20 16:19:54
絕對(duì)值編碼器是一種新型絕對(duì)值編碼器,它是用加熱塑壓的方法,將有機(jī)電阻粉壓在絕緣體的凹槽(義:物體表面上凹下的槽)內(nèi)。多圈絕對(duì)值編碼器如果要測(cè)量旋轉(zhuǎn)超過360度范圍,就要用到 多圈絕對(duì)式編碼器。 編碼器
2023-04-20 14:04:39
增量式編碼器是能夠依據(jù)旋轉(zhuǎn)運(yùn)動(dòng)形成信號(hào)的編碼器,其刻度方式為每一個(gè)脈沖都進(jìn)行增量測(cè)算,因此得名。它常與機(jī)械設(shè)備轉(zhuǎn)換裝置搭配使用(如齒條-齒輪、精確測(cè)量輪或心軸搭配使用),用以精確測(cè)量直線運(yùn)動(dòng)。增量式編碼器是把位移轉(zhuǎn)換成周期性的電信號(hào),然后把這個(gè)電信號(hào)轉(zhuǎn)化成計(jì)數(shù)脈沖,用脈沖的個(gè)數(shù)表示位移的大小。
2023-04-17 15:39:051617 
的轉(zhuǎn)速。 此外,為判斷旋轉(zhuǎn)方向,碼盤還可提供相位相差90°的兩路脈沖信號(hào)。 1.1.2 霍爾編碼器 霍爾編碼器是一種通過磁電轉(zhuǎn)換將輸出軸上的機(jī)械幾何位移量轉(zhuǎn)換成脈沖或數(shù)字量的傳感器。 霍爾編碼器
2023-03-30 14:57:12
編碼器是一種將角位移或者直線位移轉(zhuǎn)換成一連串電數(shù)字脈沖的一種傳感器。 可以通過編碼器測(cè)量電機(jī)轉(zhuǎn)動(dòng)的位移或者速度信息。光電編碼器是由光碼盤和光電檢測(cè)裝置組成。光碼盤是在一定直徑的圓板上等分地開通若干個(gè)
2023-03-30 13:53:111 什么是絕對(duì)值編碼器?絕對(duì)值編碼器裝置在多圈旋轉(zhuǎn)后仍然能提供絕對(duì)位置,不用時(shí)歸零。多回轉(zhuǎn)裝置包括內(nèi)部傳動(dòng)裝置,這是給用戶提供最好的解決方案。主接口是BiSS-C或SSI。對(duì)于某些設(shè)備,具體位置載入的延遲可能是一個(gè)難題。
2023-03-24 11:26:182769 
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論