 電子發(fā)燒友App
電子發(fā)燒友App


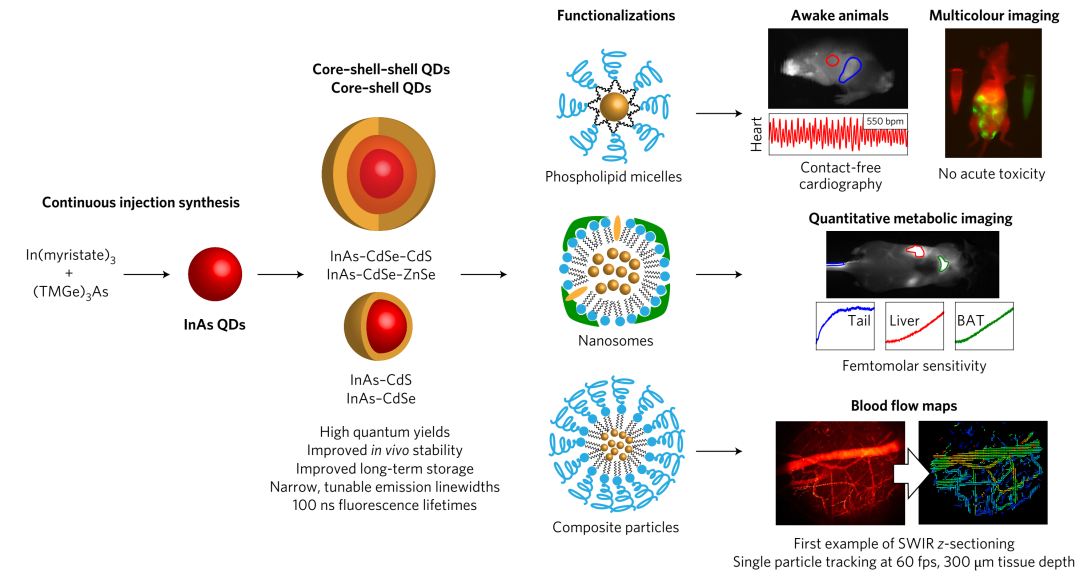
基于后向散射場(chǎng)數(shù)據(jù)的艦船目標(biāo)高分辨雷達(dá)成像技術(shù)
摘要: 為使高分辨雷達(dá)圖像更精確反映艦船目標(biāo)的結(jié)構(gòu)、形狀特點(diǎn),研究了基于后向散射場(chǎng)數(shù)據(jù)的艦船目標(biāo)高分辨雷達(dá)成像技術(shù)。建立了艦船目標(biāo)三維模型,采用三角面元對(duì)模型進(jìn)行剖分,利用物理光學(xué)法計(jì)算面元的鏡面反射,應(yīng)用等效電流法計(jì)算模型棱邊部分繞射,依據(jù)機(jī)載雷達(dá)聚束式合成孔徑(SAR)成像原理,得到艦船目標(biāo)在不同姿態(tài)角和頻率采樣點(diǎn)的后向散射場(chǎng)。通過(guò)數(shù)據(jù)變換得到目標(biāo)的一維距離像以及SAR圖像,在此基礎(chǔ)上研究了入射頻率、方位角和極化方式對(duì)艦船目標(biāo)探測(cè)的影響。仿真結(jié)果表明,該技術(shù)應(yīng)用后向散射場(chǎng)數(shù)據(jù)得到的雷達(dá)SAR圖像能反應(yīng)出艦船的基本特征,可應(yīng)用于艦船目標(biāo)自動(dòng)識(shí)別。
1. 引言
雷達(dá)是現(xiàn)代武器最重要的傳感器,經(jīng)過(guò)多年來(lái)不斷發(fā)展,雷達(dá)獲取信息的能力不斷增長(zhǎng),但是在戰(zhàn)場(chǎng)偵察、防空反導(dǎo)等武器雷達(dá)系統(tǒng)運(yùn)用中,需要克服的一個(gè)難點(diǎn)是如何在更遠(yuǎn)距離上可靠檢測(cè)和識(shí)別空中、地面及海上目標(biāo)。為解決這一問(wèn)題,新體制雷達(dá)不斷出現(xiàn),其中高分辨雷達(dá)系統(tǒng)由于在軍事和民用領(lǐng)域的廣泛應(yīng)用而受到廣泛關(guān)注,成為研究的熱點(diǎn) [1] - [10] 。國(guó)內(nèi)外學(xué)者在艦船目標(biāo)的高分辨雷達(dá)成像和自動(dòng)識(shí)別技術(shù)方面做了大量工作,其中基于高分辨一維距離像與合成孔徑雷達(dá)(SAR)圖像的雷達(dá)目標(biāo)特征提取及識(shí)別方法是研究的熱點(diǎn) [11] [12] [13] [14] [15] 。
當(dāng)目標(biāo)雷達(dá)散射處于光學(xué)散射區(qū),雷達(dá)發(fā)射信號(hào)帶寬很大時(shí),復(fù)雜目標(biāo)占據(jù)多個(gè)雷達(dá)距離分辨單元,其雷達(dá)回波稱為一維距離像,若雷達(dá)在方位角旋轉(zhuǎn)一定角度,就可以得到目標(biāo)合成孔徑雷達(dá)SAR成像。與普通雷達(dá)相比,寬帶雷達(dá)探測(cè)精度更高,能夠精細(xì)反應(yīng)目標(biāo)的尺寸結(jié)構(gòu)、形狀和散射點(diǎn)分布等信息,更有利于雷達(dá)進(jìn)行自動(dòng)目標(biāo)識(shí)別。
以往大多數(shù)研究高分辨雷達(dá)成像技術(shù)通常采用強(qiáng)散射點(diǎn)建模,而在實(shí)際應(yīng)用中,當(dāng)雷達(dá)照射目標(biāo)角度變化時(shí),目標(biāo)的強(qiáng)散射點(diǎn)會(huì)發(fā)生變化,因此采用散射點(diǎn)模擬目標(biāo)散射會(huì)存在一定的誤差,不能夠真實(shí)反映雷達(dá)工作情況。本文采用三角面元構(gòu)建復(fù)雜目標(biāo)三維模型,利用高頻近似算法計(jì)算目標(biāo)的后向散射場(chǎng)數(shù)據(jù),通過(guò)與FEKO軟件計(jì)算結(jié)果進(jìn)行比較,驗(yàn)證了算法的正確性,研究艦船目標(biāo)的散射特性,并在此基礎(chǔ)上得到艦船目標(biāo)的SAR圖像,以及不同角度雷達(dá)照射情況下目標(biāo)的一維距離像。分析了頻率、姿態(tài)角、極化方式等各項(xiàng)參數(shù)對(duì)高分辨雷達(dá)成像的影響。
2. 機(jī)載SAR場(chǎng)景及成像參數(shù)
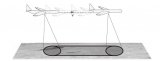
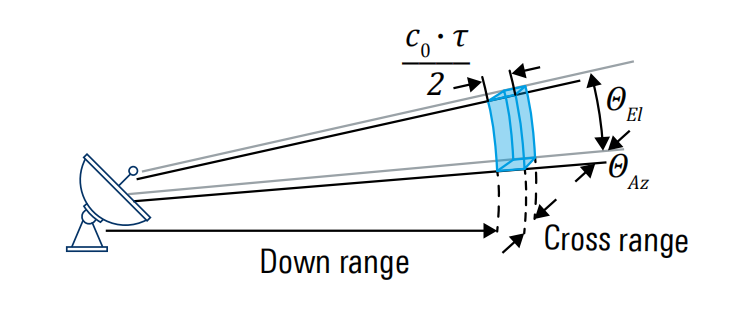
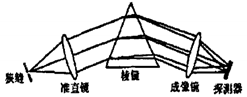
機(jī)載聚束式SAR成像場(chǎng)景如圖1所示。飛機(jī)飛行高度為H,距離目標(biāo)的距離為R,飛行速度為v,其視線相對(duì)于目標(biāo)坐標(biāo)系俯仰角為θ,方位角為φ。
進(jìn)行電磁散射建模,假設(shè)入射方位角和俯仰角均勻采樣,采樣點(diǎn)為 {(θm,φm),m=1,2,?,M}{(θm,φm),m=1,2,?,M} ,據(jù)預(yù)先確定的中心視角 (θc,φc)(θc,φc) 、視角變化范圍 (Δθ,Δφ)(Δθ,Δφ) 。照射頻率變化采用頻率步進(jìn)的方式均勻采樣,采樣點(diǎn)為 {fn,n=1,2,?,N}{fn,n=1,2,?,N} ,計(jì)算艦船目標(biāo)的后向散射場(chǎng)數(shù)據(jù)用以模擬實(shí)際探測(cè)雷達(dá)回波,在此基礎(chǔ)上利用適當(dāng)?shù)乃惴▽?duì)其進(jìn)行成像。根據(jù)設(shè)定的中心頻率fc和帶寬B,以及的角度采樣點(diǎn)M和頻率采樣點(diǎn)N,可以得到雷達(dá)成像場(chǎng)景條件參 [3] :
Figure 1. Airborne SAR imaging geometry
圖1. 機(jī)載SAR成像場(chǎng)景
依據(jù)實(shí)際情況下探測(cè)目標(biāo)最小不模糊距離來(lái)確定頻率采樣點(diǎn)個(gè)數(shù)N。
3. 艦船目標(biāo)電磁散射計(jì)算
考慮工作波長(zhǎng)為厘米級(jí)的機(jī)載雷達(dá)對(duì)艦船目標(biāo)的探測(cè)性能。在該情況下,艦船目標(biāo)為電大尺寸目標(biāo),此時(shí)目標(biāo)散射處于光學(xué)區(qū)域,各散射單元之間的耦合作用很小,通常采用高頻近似算法計(jì)算目標(biāo)的電磁散射特性。
3.1. 目標(biāo)剖分模型
首先建立艦船目標(biāo)的三維模型,將其導(dǎo)入Hypermesh軟件,依據(jù)平面波入射頻率以及計(jì)算精度進(jìn)行網(wǎng)格剖分,圖2為利用三角面元對(duì)某型艦船目標(biāo)進(jìn)行剖分后的三維模型,該艦船長(zhǎng)100 m,寬13 m,桅桿高度20 m。
3.2. PO + MEC算法計(jì)算目標(biāo)散射
物理光學(xué)(PO)法的基本原理,當(dāng)目標(biāo)表面的曲率半徑遠(yuǎn)遠(yuǎn)大于照射電磁波的波長(zhǎng)時(shí),假設(shè)在被入射
Figure 2. Ship subdivision model
圖2. 艦船剖分模型
波直接照明的區(qū)域存在表面電磁流。可以使用目標(biāo)表面的等效感應(yīng)電磁流的散射來(lái)代替散射體自身的散射,此時(shí)目標(biāo)的散射場(chǎng)通過(guò)解析公式進(jìn)行求解。考慮平面波入射,物體表面遠(yuǎn)區(qū)散射場(chǎng)可由根據(jù)Stratton-Chu方程 [16] 進(jìn)行計(jì)算:
通過(guò)考慮目標(biāo)棱邊的繞射對(duì)PO的結(jié)果進(jìn)行改進(jìn)。采用文獻(xiàn) [17] 中的等效電流法(MEC)計(jì)算目標(biāo)棱邊繞射,該方法應(yīng)用等效電磁流的散射等效邊緣繞射場(chǎng)。通過(guò)對(duì)等效電磁流進(jìn)行積分來(lái)計(jì)算棱邊在任意方向的散射場(chǎng)。對(duì)于邊緣為 CC 的劈邊,其遠(yuǎn)區(qū)邊緣繞射場(chǎng)可通過(guò)下式進(jìn)行計(jì)算:
用寬帶信號(hào)照射艦船目標(biāo),利用PO + MEC算法計(jì)算艦船目標(biāo)在不同頻段、不同姿態(tài)角下的后向散射場(chǎng)數(shù)據(jù),流程如圖3所示。
例如,對(duì)某一艦船目標(biāo)在n個(gè)姿態(tài)角進(jìn)行照射,得到的散射場(chǎng)數(shù)據(jù)為:
Figure 3. The flow diagram of PO + MEC algorithm
圖3. PO + MEC算法流程圖
每一列數(shù)據(jù)對(duì)應(yīng)一個(gè)姿態(tài)角下不同頻率采樣,每一行數(shù)據(jù)對(duì)應(yīng)一個(gè)頻率下不同姿態(tài)角采樣。對(duì)數(shù)據(jù)做二維傅里葉變換(FFT)可以得到目標(biāo)的SAR成像,對(duì)每一列直接做逆傅里葉變換(IFFT)即可得到目標(biāo)高分辨距離像。
4. 仿真計(jì)算
采用第二節(jié)中的三維艦船模型,艦船放置于xoy平面,中心位于坐標(biāo)原點(diǎn),艦首對(duì)應(yīng)x軸向正方向,艦船軸線垂直于y軸(見(jiàn)圖4),剖分精度為 λ/6λ/6 ,總共18225個(gè)頂點(diǎn),36,446個(gè)三角面元,54,701個(gè)公用棱邊。
設(shè)照射頻率為2 GHz,應(yīng)用純PO算法以及PO + MEC算法計(jì)算邊長(zhǎng)為0.5 m的立方體后向散射,得到水平極化(HH)雷達(dá)散射截面積(RCS)如圖5所示,圖中給出了應(yīng)用FEKO軟件計(jì)算的結(jié)果。計(jì)算結(jié)果表明,兩種方法的計(jì)算結(jié)果吻合的較好,驗(yàn)證了PO + MEC算法的正確性。由圖可知,通過(guò)加入計(jì)算棱邊繞射,MEC很好地改善了PO的計(jì)算結(jié)果。
圖6所示為應(yīng)用本文算法計(jì)算艦船模型的后向散射,方位角φ = 0?,俯仰角θ變化范圍0~180?,雷達(dá)照射頻率2 GHz,圖6(a)為HH極化結(jié)果,圖6(b)為VV極化結(jié)果。計(jì)算數(shù)據(jù)表明,艦船散射在0? (艦首)、90?(艦船正上方)以及180?(艦尾)方向最大,VV極化情況下RCS略小于HH極化結(jié)果,尤其是30?~70?范圍內(nèi)HH極化結(jié)果明顯較大。
取俯仰角θ分別為30?和60?,方位角φ變化范圍0?~360?,相當(dāng)于雷達(dá)繞艦船一周,其余參數(shù)不變,得到的散射結(jié)果如圖7所示,其中圖7(a)為HH極化結(jié)果,圖7(b)為VV極化結(jié)果。由圖可知,艦船RCS在艦首(0?)、艦尾(180?)、船舷(90?和270?)等方向最強(qiáng),且隨著俯仰角增大而增大,同圖5中結(jié)果類似,HH極化散射強(qiáng)于VV極化結(jié)果,這是由于HH極化二向性散射強(qiáng)于VV極化,因此HH極化更能反映艦船的上層建筑結(jié)構(gòu),導(dǎo)致HH極化散射強(qiáng)于HH極化。因此,應(yīng)用HH極化雷達(dá)探測(cè)艦船目標(biāo)更具有優(yōu)勢(shì)。
Figure 4. Electromagnetic scattering geometry
圖4. 電磁散射場(chǎng)景
Figure 5. Algorithm validation
圖5. 算法驗(yàn)證
(a)(b)
Figure 6. RCS of ship with different incidence angle; (a) HH polarization; (b) VV polarization
圖6. 不同俯仰角艦船目標(biāo)RCS;(a) HH極化;(b) VV極化
考慮典型L波段機(jī)載搜索雷達(dá),照射頻率為fc = 2.0 GHz,帶寬為B = 150 MHz,頻率范圍:1.925 GHz~2.075 GHz,采樣間隔Δf = 1 MHz,共N = 150個(gè)采樣點(diǎn),此時(shí)距離分辨率為ρr = C/2B = 1.0 m,假設(shè)雷達(dá)載機(jī)飛行高度距離地面高度9 km,目標(biāo)距離200 Km,此時(shí)俯仰角θ = 2.6?。在HH極化情況下,計(jì)算后向散射場(chǎng)數(shù)據(jù),進(jìn)行IFFT變換并對(duì)幅值歸一化的到艦船目標(biāo)的一維距離像如圖8所示,圖8(a)為方位角φ = 0?的結(jié)果,此時(shí)雷達(dá)從艦首入射,有圖可以看出,艦船在雷達(dá)視線的徑向長(zhǎng)度為100 m左
Figure 7. RCS of ship with different azimuth angle; (a) HH polarization; (b) VV polarization
圖7. 不同方位角艦船目標(biāo)RCS;(a) HH極化;(b) VV極化
Figure 8. Ship HRRP of different azimuth angle
圖8. 不同方位角艦船目標(biāo)一維距離像
右,主要反射部位集中于船身20~90 m區(qū)域,這正是艦船上層建筑最為集中的區(qū)域。圖8(b)為方位角φ = 90?的結(jié)果,相當(dāng)于雷達(dá)從船舷部照射,此時(shí)雷達(dá)徑向距離徑向長(zhǎng)度為14 m左右,對(duì)應(yīng)的是艦船目標(biāo)的船體寬度。因此,通過(guò)不同姿態(tài)角艦船高分辨一維距離像可以得到艦船長(zhǎng)度、艦身寬度、艦橋上層建筑尺寸和數(shù)量等船體結(jié)構(gòu)信息,這些信息均可應(yīng)用于后續(xù)進(jìn)行雷達(dá)自動(dòng)目標(biāo)。
其余參數(shù)不變,HH極化情況下,取方位角變化范圍10?,采樣間隔為0.05?,采樣數(shù)M = 201個(gè),得到150行和 201列大小的矩陣數(shù)據(jù),對(duì)其進(jìn)行FFT變換,即可得到艦船目標(biāo)SAR成像,見(jiàn)圖9,其中圖9(a)為直接FFT變換結(jié)果,圖9(b)為加窗FFT變換,窗函數(shù)為布萊克曼窗,經(jīng)過(guò)對(duì)比可知窗函數(shù)能夠很好的改善成像結(jié)果。從圖像中可以分辨出艦船的尺寸與圖7中相同,同時(shí)可以發(fā)現(xiàn)艦船強(qiáng)散射點(diǎn)集中于甲板上建筑反射。由于不同艦船目標(biāo)的長(zhǎng)度、寬度和長(zhǎng)寬比都是獨(dú)特的,因此經(jīng)過(guò)提取這些特征參數(shù),可以很好的應(yīng)用于雷達(dá)自動(dòng)目標(biāo)識(shí)別。圖9(c)為艦船旋轉(zhuǎn)45?的SAR圖像,與圖9(b)相比,此時(shí)的艦船目標(biāo)強(qiáng)散射點(diǎn)增加,這是由于船舷部分的散射較強(qiáng)造成的。同時(shí)該結(jié)果證明了本文算法對(duì)不同姿態(tài)目標(biāo)能得到很好的結(jié)果,具有很好的適應(yīng)性。 Figure 9. SAR of ship; (a) SAR without window function; (b) SAR with window function; (c) SAR of rotating 45 degree
圖9. 艦船目標(biāo)SAR圖像;(a) 不加窗圖像;(b) 加窗圖像;(c) 旋轉(zhuǎn)45?成像
5. 結(jié)論
本文在建立艦船目標(biāo)三維模型的基礎(chǔ)上,研究了艦船目標(biāo)L波段探測(cè)雷達(dá)照射下不同姿態(tài)角和極化方式下的電磁散射特性。結(jié)果表明,艦船目標(biāo)的散射主要集中于艦首、艦尾及船舷側(cè),并且HH極化反射要強(qiáng)于VV極化。根據(jù)SAR成像原理,計(jì)算了不同方位角和頻率采樣點(diǎn)的后向散射數(shù)據(jù),通過(guò)數(shù)據(jù)變換得到目標(biāo)的一維距離像和SAR圖像。計(jì)算結(jié)果表明,艦船目標(biāo)高分辨雷達(dá)圖像能夠較好的反應(yīng)艦船的尺寸、形狀和強(qiáng)散射點(diǎn)數(shù)量,這些特征在雷達(dá)自動(dòng)目標(biāo)識(shí)別中具有重要應(yīng)用,同時(shí)該結(jié)果也證明了文中三維模型及高頻近似算法的準(zhǔn)確性。研究結(jié)果對(duì)提高雷達(dá)艦船目標(biāo)探測(cè)與識(shí)別具有一定的參考意義。
審核編輯:湯梓紅

















































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論