請問一下,百度文庫資料里面,下圖所示的系統鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發環境嗎?與前面4GB版本的鏡像有什么區別?
2024-03-01 23:06:01
》+學習心得4第三章專用放大器
《Android Runtime源碼解析》+深入體會第六章ART的執行(4)
希望上面的設計能對您有所幫助!
謝謝!
還沒吃飯中
2024年2月6日
2024-02-06 10:28:43
ChatGPT來增強其交互能力。
5.1 ChatGPT集成
AI算法實現
為了使機械臂具有AI功能,我會使用機器學習和AI算法來優化其運動軌跡和控制參數。例如,可以使用強化學習算法訓練機械臂的運動策略
2024-02-01 20:18:17
如何使用Python進行圖像識別的自動學習自動訓練? 使用Python進行圖像識別的自動學習和自動訓練需要掌握一些重要的概念和技術。在本文中,我們將介紹如何使用Python中的一些常用庫和算法來實現
2024-01-12 16:06:19 166
166 設置ROS環境變量是使用ROS的重要步驟之一。本文將詳細介紹如何設置ROS環境變量,包括什么是環境變量、為什么要設置ROS環境變量、如何設置ROS環境變量等。 什么是環境變量 環境變量是一種操作系統
2023-12-28 13:52:42295 LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
、3張圖)。
測試完畢,六軸傳感器器ICM-20607功能正常!七、實驗總結1、從測試過程中理解了六軸傳感器器ICM-20607基礎知識。2、從測試過程中理解了ELF 1開發板命令行操作方式。3、從
2023-12-15 00:02:55
)是一家全球知名的半導體和電子元器件授權代理商,分銷超過1200家品牌制造商的680多萬種產品,為客戶提供一站式采購平臺。我們專注于快速引入新產品和新技術,為設計工程師和采購人員提供潮流選擇。歡迎關注我們! 更多精彩 原文標題:火熱報名中!2023第三屆短
2023-12-13 16:30:02122 
python3-colcon-common-extensions ros-foxy-rosidl-generator-c
安裝編譯鏈需要安裝一些依賴包,通過以下命令進行安裝
apt-get -f -y install git
2023-12-05 20:58:07
驗證ROS是否安裝成功 按正常來說ROS到這里就安裝完成了,現在我們來驗證一下,輸入以下命令: roscore 如果出現了以下的問題:Command ‘roscore’ not found
2023-12-01 16:51:541238 
安裝ROS2功能包 接下來,還有一個很重要的配置,那就是安裝ROS2功能包,我們說TogetherROS是基于ROS2深度優化的,很多模塊還是會復用ROS2中的功能,所有ROS2的原生功能也可以支持
2023-12-01 16:02:24326 
ROS通信接口 接口可以讓程序之間的依賴降低,便于我們使用別人的代碼,也方便別人使用我們的代碼,這就是ROS的核心目標,減少重復造輪子。 ROS有三種常用的通信機制,分別是話題、服務、動作,通過
2023-12-01 15:03:57250 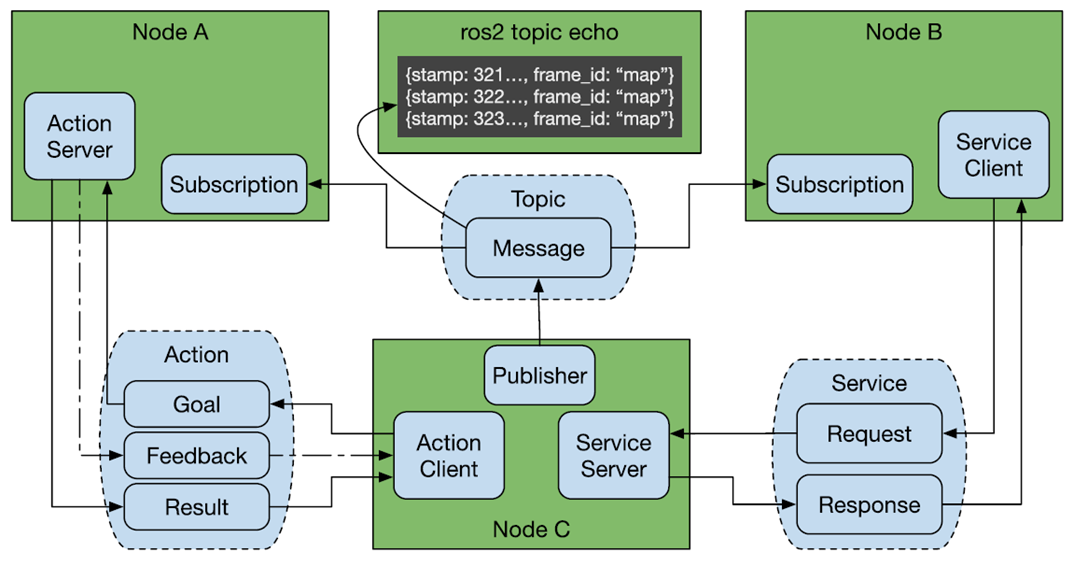
NVIDIA Isaac Transport for ROS(NITROS) 是隨 ROS 2 Humble 加入的兩項硬件加速功能——類型適配和類型協商。 類型適配 使 ROS 節點能夠使用針對
2023-11-30 19:35:01254 
領域的集大成者,主要應用于機器人控制領域,如AGV工業機器人控制器、智能機械臂控制器、機器人導航系統等。
ROS系統主要特點有哪些
(1) 提供豐富的機器人算法庫機器人的各種控制以及通信離不開算法
2023-11-30 16:01:01
? ? ? Tronlong創龍科技ROS讓機器人開發更便捷;我們來看看具體的。 ROS系統是什么 ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統。它提供
2023-11-30 14:41:071284 
如果你是一個ROS2的開發者,可能對剛才我們使用的ROS2命令比較熟悉,這時你可能也會產生一個問題:我們之前也安裝了ROS2系統,那ROS2的原生功能還可以正常運行么? 我們再來試一試ROS2中自帶
2023-11-28 16:29:18327 
機器人操作系統ROS目前最受關注的兩個模塊是導航(Navigation)和機械臂控制(MoveIt!)。 其中,機械臂控制模塊(后面簡稱MoveIt)可以讓用戶快速建立機械臂模型并實現機械臂的控制
2023-11-28 11:43:26282 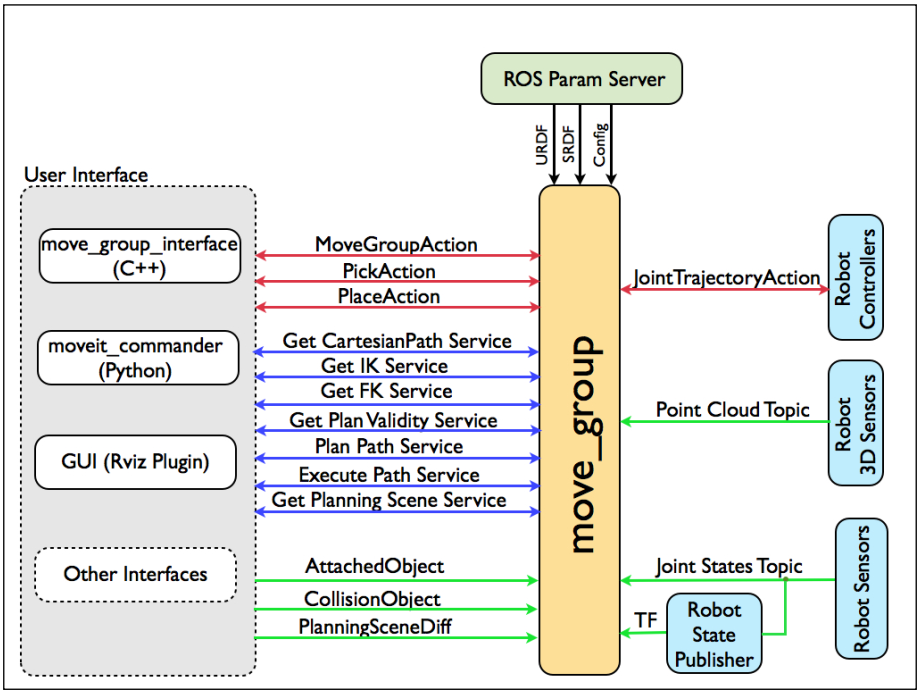
ros1: talker 注冊 listener 注冊 ROS Master 進行信息匹配 listener 發送鏈接請求 talker 確認請求 建立連接 talker 給 listener
2023-11-27 11:26:02268 
基本概念: ROS是一個用于在不同進程間匿名的發布、訂閱、傳遞信息的中間件。 ROS2系統的核心部分是ROS網絡(ROS Graph)。 ROS網絡是指在ROS系統中不同的節點間相互通信的連接
2023-11-27 11:21:15783 工作空間的src文件夾下,并解壓 安裝相關依賴 (1)關于Python 關于Python推薦使用Python3,對于Ubuntu20.04對應的ROS Noetic一般默認使用的都是Python3,可以在終端執行python指令來查看Pytho
2023-11-26 17:29:30673 創建新的ROS工作空間 由于ROS Motion Planning運動規劃庫與Navigation導航包存在一些同名但源碼和功能不同的功能包,比如global_planne。 因此,個人推薦創建
2023-11-26 17:09:04775 
配置ROS驅動功能包 將WHEELTEC 100N的 ROS_SDK 保存在工作空間的src文件夾下。 通過 catkin_make 進行編譯。 剛裝的ros環境會報錯,如下: Make Error
2023-11-22 18:13:34512 
TF命令行操作 ROS中的TF該如何使用呢?我們先通過兩只小海龜的示例,了解下基于坐標系的一種機器人跟隨算法。 小海龜跟隨例程 這個示例需要我們先安裝相應的功能包,然后就可以通過一個launch文件
2023-11-22 17:24:14240 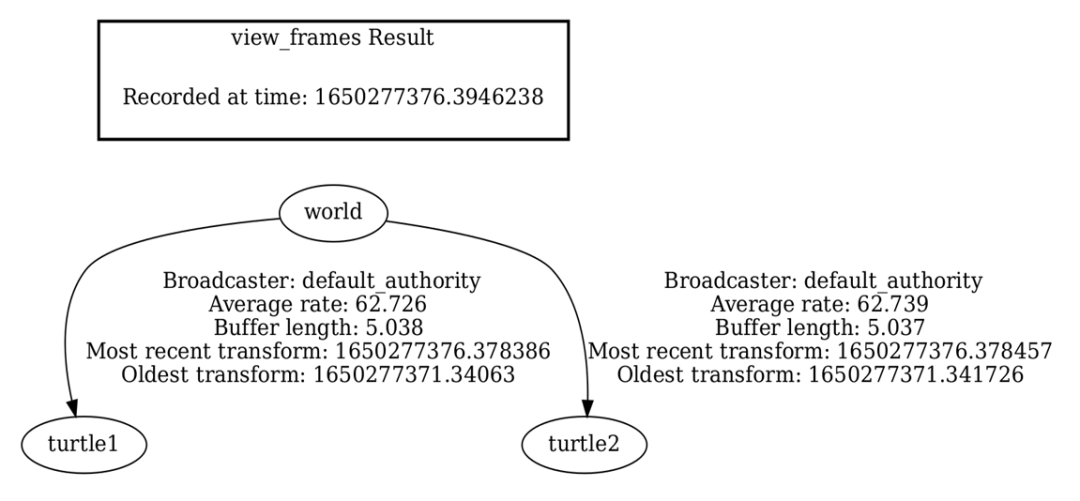
ROS的擴展 ROS除了本身框架性的東西以外,最大的特色就是能融合很多其他的東西,形成一個機器人開發生態圈,難怪ROS名為機器人操作系統,使命是powering the world‘s robots
2023-11-21 18:12:20321 ROS核心框架 對于第一個問題,我也沒仔細研究過源碼,核心代碼基本由python和C++組成,運用了xmlrpc機制,每個運行的節點可以理解成一個進程。進程間通訊有些是共享內存的方式(比如
2023-11-21 18:07:24388 
2023年優霸杯第十屆大中華區電子變壓器電感器電源適配器行業年度評選企業報名火熱進行中,歡迎各位行業人士積極申報!
2023-11-20 13:56:37230 對于ROS而言,其最常用的就是Topic話題以及Service兩個了。之前我們在了解Unity Robotics Hub時候就了解到基本的Unity和ROS的通訊,下面我們來詳細介紹一下Unity
2023-11-17 17:22:25279 
Simulink對機器人操作系統(ROS)的支持使我們能夠創建與ROS網絡一起工作的Simulink模型。ROS是一個通信層,允許機器人系統的不同組件以消息的形式交換信息。 組件通過將消息發布到特定
2023-11-15 17:26:46224 
前言:一直都覺得ROS很神秘,到底是個操作系統,僅憑稱呼就讓我望而卻步了。但ROS和自動駕駛仿真有著千絲萬縷的聯系,作為仿真軟件和智駕算法的數據橋梁,ROS是個繞不開的話題,所以還是得硬著頭皮啃一啃。然后用大白話講給你聽,最好再做兩個小栗子,那可真是功德無量了。
2023-11-15 12:42:031528 
。通過悟空派H3和ROS系統的協同工作,我們能夠遠程操控小車,實時獲取行駛里程數據,并在復雜的環境中靈活導航。
在接下來的視頻中,我將詳細展示這款全向輪小車的詳細設計和性能表現,以及如何利用悟空派H3
2023-11-12 01:00:04
DIY平衡控制系統,需要使用加速度傳感器,三軸或六軸的均可以,哪種靈敏度高一些?
2023-11-10 06:46:11
51單片機怎么處理機械臂數據
2023-10-31 06:29:13
OpenHarmony Meetup城市巡回成都站火熱招募中!!
日期:2023年10月27日14:00
地點:電子科技大學(沙河校區)學術交流中心一樓104會議室
與OpenHarmony技術
2023-10-24 14:18:42
paddle_inference_ros_demo功能包是基于paddle_inference_ros開發的,幫助開發者快速體驗paddle_inference在ROS環境下的推理部署效果的功能包。可以直接進入該項目鏈接進行查看和快速體驗。
2023-10-20 17:02:07265 
報名地址點擊報名
直播簡介
1.了解機械手視覺引導的應用場景
2.了解scara機器人運動學正逆解
3.了解相機畸變矯正方法
4.了解手眼標定-9點標定方法
5.了解機械手旋轉中心標定方法
6.了解
2023-10-17 15:37:40
OpenHarmony Meetup城市巡回深圳站火熱來襲!!
日期:2023年10月15日14:00地點:深圳市福田區上步路中路1003號深圳市科學館
與OpenHarmony技術大咖近距離
2023-10-10 15:14:44
overlays: /root/catkin_ws/devel;/opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found
2023-10-04 23:35:18
Python 是一種解釋型、面向對象、動態數據類型的高級程序設計語言。通過 Python 編程,我們能夠解決現實生活中的很多任務。本書是一本面向實踐的 Python 編程實用指南。本書的目的,不僅是
2023-09-27 06:21:49
運行文件hello_world.py時,末尾的.py指出這是一個Python程序,因此編輯器將使用Python解釋器 來運行它。Python解釋器讀取整個程序,確定其中每個單詞的含義。例如,看到單詞print 時,解釋器就會將括號中的內容打印到屏幕,而不會管括號中的內容是什么。
2023-09-20 16:16:34151 這里推薦VSCode。安裝完python的插件后,非常好用。
2023-09-20 16:15:10160 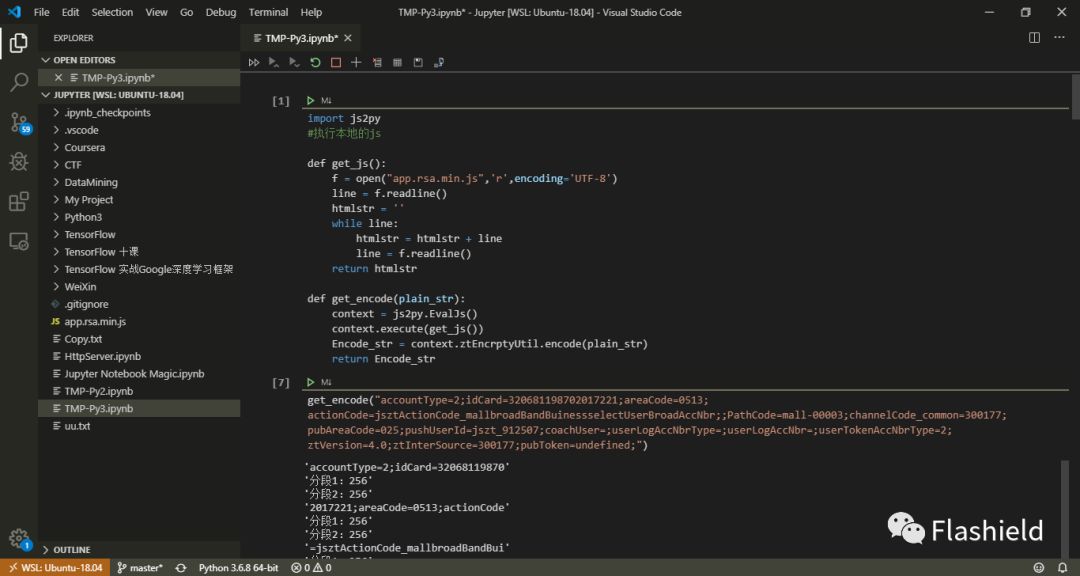
XMLRPC是什么? 關于ROS節點建立連接的技術細節,官方文檔說的非常簡單,在這里ROS Technical Overview。沒有基礎的同學看這個介紹必然還是不懂。 在ROS中,節點與節點之間
2023-09-14 17:40:14631 實現通信的代碼在ros_comm包中,如下。 其中clients文件夾一共有127個文件,看來是最大的包了。 現在我們來到了ROS最核心的地帶。 客戶端這個名詞出現的有些突然,一個機器人操作系統
2023-09-14 17:29:48582 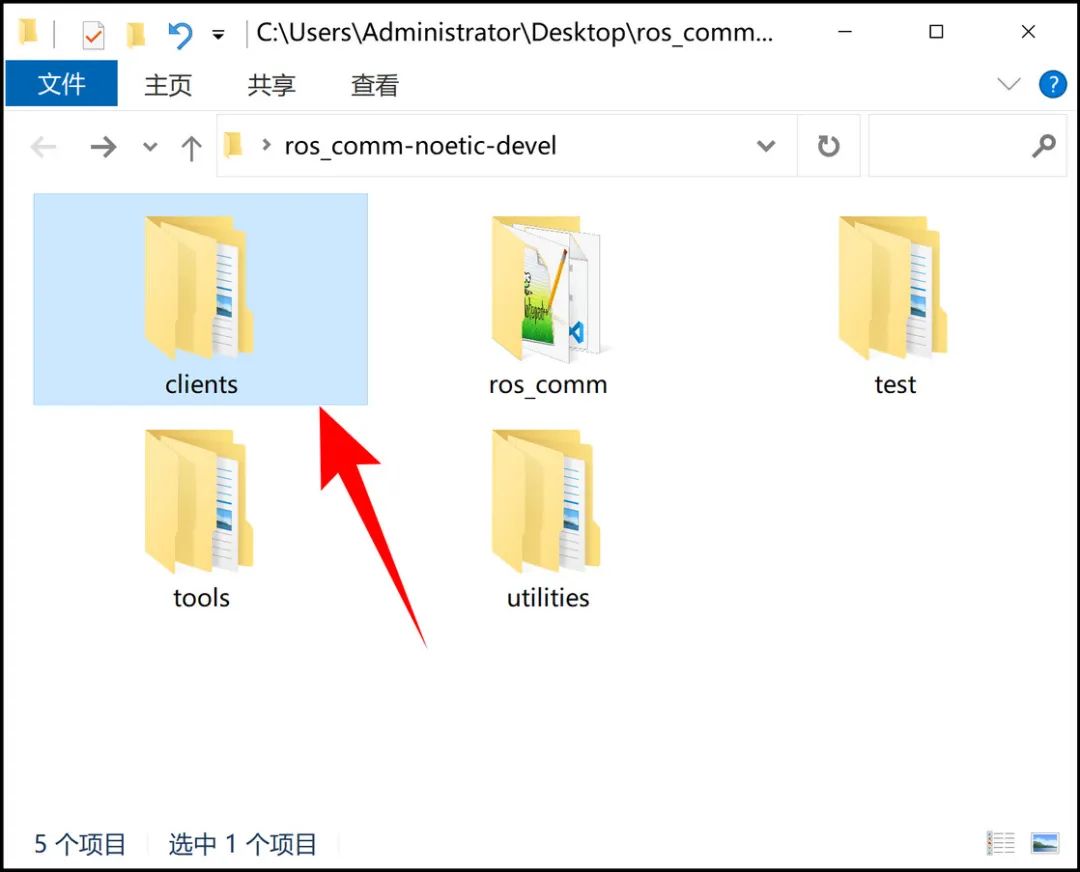
理解了序列化,再回到ROS。我們發現,ROS沒有采用第三方的序列化工具,而是選擇自己實現,代碼在roscpp_core項目下的roscpp_serialization中,見下圖。這個功能涉及的代碼
2023-09-14 17:26:28557 Python是一種流行并簡單和易用的編程語言, 吸引了眾多初學者和專業開發人員。許多人選擇使用樹莓派(Raspberry Pi)作為學習Python的工具,因為它體積小、價格實惠,并且提供了將編程
2023-09-08 13:53:31312 本文檔旨在提供 ST LSM6DSL iNEMO 六軸慣性傳感器模塊相關的使用信息和應用提示。
2023-09-06 07:12:52
2023開源和信息消費大賽——首屆開放原子開源大賽火熱報名中,誠邀參加!
2023-09-05 16:32:57388 Python是一門應用性較強的編程語言,近年來的市場也非常大。學習需要,先熟悉一下python的語法。
2023-09-04 16:26:22251 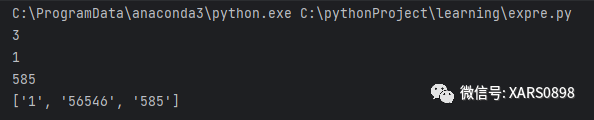
] [--use-python-default-buffering]
Call `ros2 <command> -h` for more detailed usage. ...
ros2 is an extensible
2023-09-04 04:59:14
python數據挖掘與機器學習 Python是一個非常流行的編程語言,被廣泛用于數據挖掘和機器學習領域。在本篇文章中,我們將探討Python在數據挖掘和機器學習中的應用,并介紹一些Python中常
2023-08-17 16:29:38818 Python機器學習概述 機器學習是人工智能領域的一個重要分支,是一種可以自動改進和學習的算法。在過去的幾十年里,機器學習已經成為計算機科學和數據科學領域中最流行、應用最廣泛的領域之一。Python
2023-08-17 16:11:43707 # CadenceLIVE China 2023 # 大會注冊報名火熱進行中 ?火熱的八月 還有什么比赴一場技術盛宴 更能讓人暢快淋漓呢? CadenceLIVE China 2023 中國用戶大會
2023-08-17 12:20:01314 
今天浩道跟大家分享python學習過程中非常經典的50條一行代碼,讓大家體驗它簡潔而功能強大的特點。同時給大家分享號主收集到的所有關于python的電子書籍,所有電子書以網盤打包,免費分享給大家學習!福利在文末喔~
2023-08-16 15:00:26512 自2023年CCF國際AIOps挑戰賽開放報名以來,組委會已收到數百名選手的踴躍報名。此次比賽設置的獎項有:一等獎1名,獎金10萬;二等獎2名,獎金5萬;三等獎3名,獎金2萬。目前挑戰賽火熱報名
2023-08-16 12:12:34382 Python人工智能的難度因人而異。對于有編程經驗的人來說,學習Python人工智能可能并不困難,因為他們已經具有了編程的基礎知識以及算法和數據結構的基礎。對于無編程經驗的人來說,學習Python人工智能可能會比較困難,但是他們可以從基礎開始逐步學習。
2023-08-13 10:52:56623 Python是一種高級編程語言,設計時為了容易學習和使用。這意味著開發人員能夠輕松入門,并能快速實現解決方案。這使Python成為了一種非常流行的編程語言。它的簡單和易于學習的本質使得Python成為創建機器學習算法和數據挖掘模型的理想語言。
2023-08-13 10:34:46848 # CadenceLIVE China 2023 # 大會注冊報名火熱進行中 ?火熱的八月 還有什么比赴一場技術盛宴 更能讓人暢快淋漓呢? CadenceLIVE China 2023 中國用戶大會
2023-08-08 12:05:02368 
接上4篇:【Start_DSC28034PNT湖人開發板免費體驗】(開源)控制機械臂小游戲2
【Start_DSC28034PNT湖人開發板免費體驗】(開源)控制機械臂小游戲
2023-07-30 14:48:14
接上三篇:【Start_DSC28034PNT湖人開發板免費體驗】(開源)控制機械臂小游戲
【Start_DSC28034PNT湖人開發板免費體驗】定時器控制數字舵機
2023-07-30 00:41:47
本文實例講述了 Python 實現 OpenCV 的安裝與使用。分享給大家供 大家參考,具體如下: 由于下一步要開始研究下深度學習,而深度學習領域很多的算法和應 用都是用 Python 來實現
2023-07-20 11:46:33 4
4 你好,我是小魚。前面我們通過對嵌入式開發的學習,了解了如何通過代碼來和硬件打交道,但如果你想擁抱ROS的強大生態,還需要把我們的硬件系接入到ROS中來,MicroROS就是幫你完成這一事情的一大利器。所以本章的重點就是帶你一起學習MicroROS的使用。
2023-07-15 16:50:192024 
電子發燒友網站提供《一個機器人操作系統(ROS)節點系統.zip》資料免費下載
2023-07-06 10:49:240 電子發燒友網站提供《使用EASE和ROS遙控機器人.zip》資料免費下載
2023-06-30 11:30:440 電子發燒友網站提供《Turtlesim Teleop與EtherCAT和Arduino使用ROS.zip》資料免費下載
2023-06-30 11:28:060 電子發燒友網站提供《從ROS控制jetbot機器人.zip》資料免費下載
2023-06-27 10:22:330 電子發燒友網站提供《使用ROS和Raspberry Pi進行Bittle遠程操作.zip》資料免費下載
2023-06-25 11:01:370 大聯大世平集團 Littelfuse在高魯棒性/穩固性開關與保護IC的應用 在線研討會 研討會時間: 2023年6月29日 1000 點擊查看研討會詳情 報名快速通道 觀看視頻get更多本場研討會
2023-06-22 18:15:02244 
電子發燒友網站提供《使用Bittle和Raspberry Pi 4的ROS SLAM.zip》資料免費下載
2023-06-14 15:23:220 Ros小車多功能QT上位機 代碼倉庫: 小車嵌入式控制可以查看我的博客: 小車通訊協議可以參
2023-05-29 15:00:341 接上幾篇:
【CW32飯盒派開發板試用體驗】+機械臂游戲項目(開源)(1)開箱試驗舵機 - 武漢芯源MCU - 電子技術論壇 - 廣受歡迎的專業電子論壇!
【CW32飯盒派開發板試用體驗】+機械臂
2023-05-24 22:27:11
ROS是機器人操作系統(Robot Operating System)的英文縮寫。ROS是用于編寫機器人軟件程序的一種具有高度靈活性的軟件架構。ROS的原型源自斯坦福大學的STanford
2023-05-19 17:45:072798 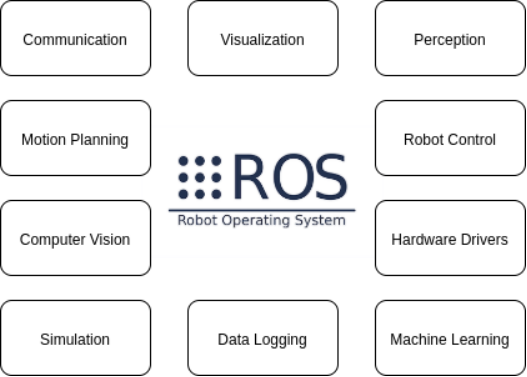
摘要:這篇文章主要介紹ROS常用工具、ROSPY和ROSCPP常用模塊,完全看完三篇文章,可以說ROS就基本入門,可以自己動手做實驗了。
**ROS常用工具**
ROS工具的 功能大概有
2023-05-19 17:37:19515 摘要:這篇文章主要介紹ROS常用工具、ROSPY和ROSCPP常用模塊,完全看完三篇文章,可以說ROS就基本入門,可以自己動手做實驗了。
**ROS常用工具**
ROS工具的 功能大概有
2023-05-19 17:37:02713 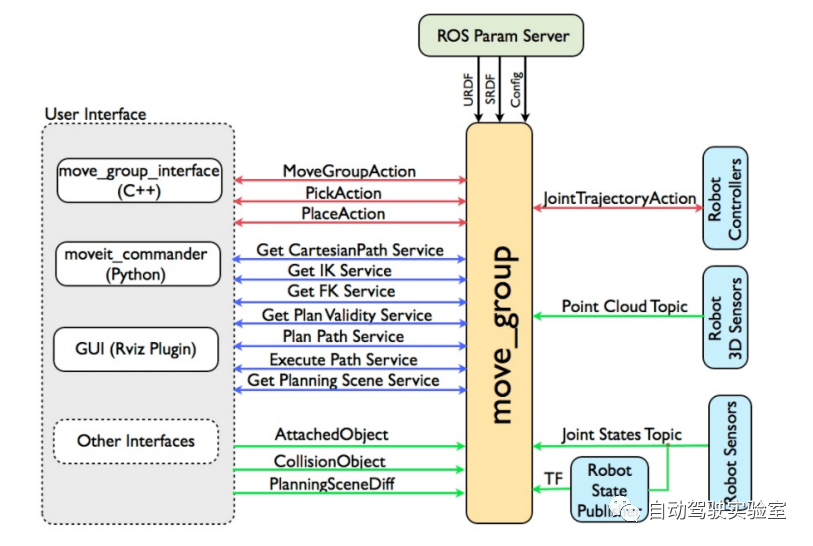
ROS的通信架構是ROS的靈魂所在,它包括數據處理,進程運行,消息傳遞等** 。這篇文章主要介紹ROS1的通信架構的基礎通信方式和相關概念,因為ROS1和ROS2的通信方式相差很大,文章后面會介紹ROS2 的通信框架和差異。
2023-05-19 17:23:062698 
機器人操作系統(Robot operating system ,ROS)是一個應用于機器人上的基礎框架,它把原本松散的零部件耦合在一起,提供通信的架構,近似上ROS是一個中間件。
ros上手簡單適合研究,但是商用缺點明顯。主要是實時通信性能有限,系統穩定差。
2023-05-19 17:21:18379 機器人操作系統(Robot operating system ,ROS)是一個應用于機器人上的基礎框架,它把原本松散的零部件耦合在一起,提供通信的架構,近似上ROS是一個中間件。
ros上手簡單適合研究,但是商用缺點明顯。主要是實時通信性能有限,系統穩定差。
2023-05-19 17:20:51530 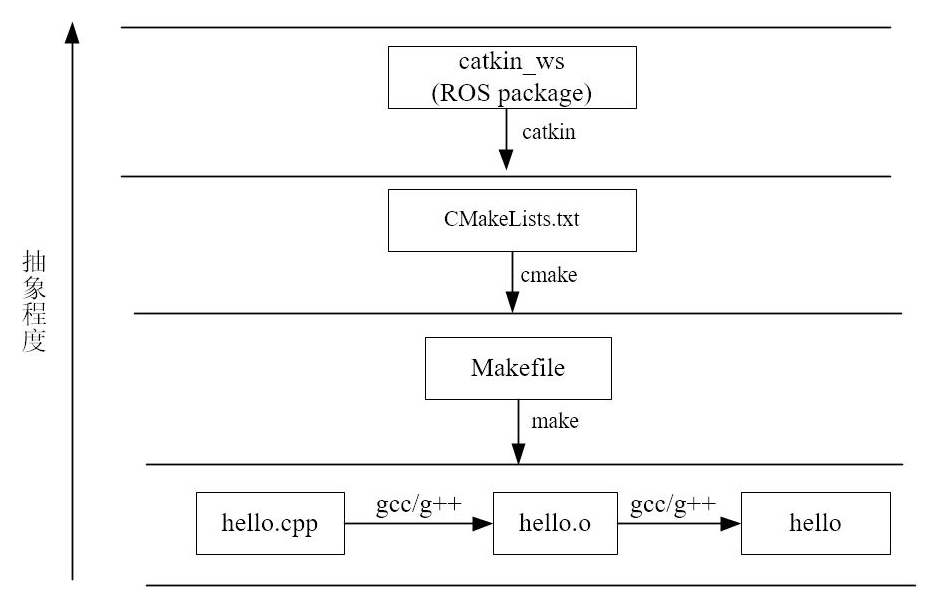
有關ROS系統的相關知識已經在上一篇文章中進行了闡述,在本篇文章中,將就ROS的進一步搭建方法做闡述。
??:本文中“消息代理”、“主服務器”、“Master Server”是相同的意思,可以互換。
2023-05-19 17:17:05370 
有關ROS系統的相關知識已經在上一篇文章中進行了闡述,在本篇文章中,將就ROS的進一步搭建方法做闡述。
??:本文中“消息代理”、“主服務器”、“Master Server”是相同的意思,可以互換。
2023-05-19 17:16:59379 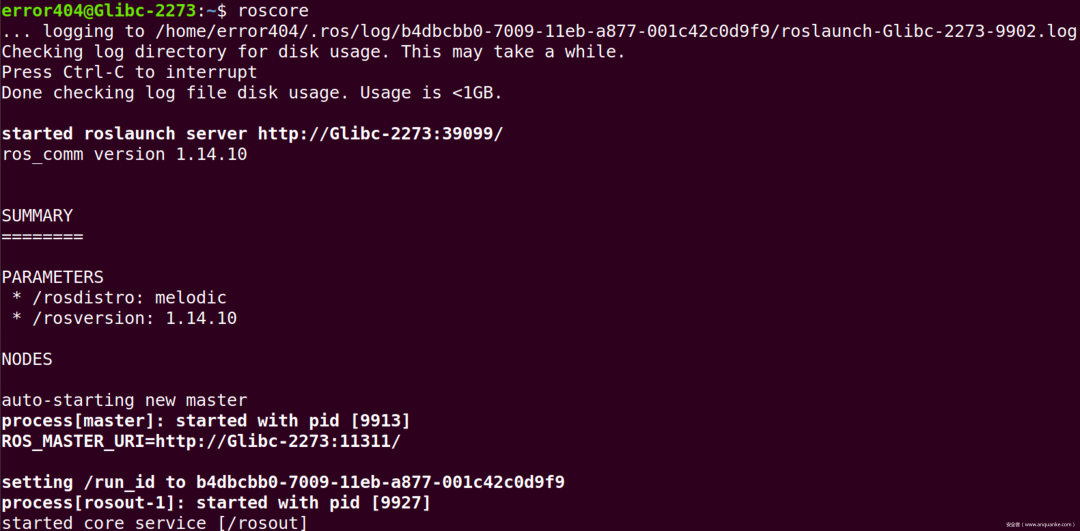
ROS的概念分為三個層次:文件系統層、計算圖層、社區層,這些層次以及概念將會在接下來的章節介紹。
除了這三個層次的概念,ROS同樣定義兩個names類型,包資源名稱和圖形資源名稱。
2023-05-19 17:11:591120 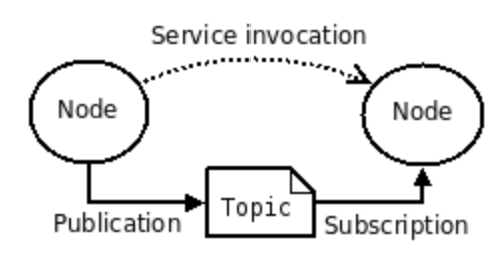
近來找到的實習主要是做智能車控制,用到的也就是ROS機器人操作系統,ROS需要運行在一個操作系統上,這個操作系統常用的就是Linux,而公司用的就是Ubuntu,所以Ubuntu-ROS組合就是實習的主要學習內容了。所以我就新開了一個坑,網絡上ROS的資源很豐富,我在此只是用以分享學習筆記。
2023-05-19 17:07:413751 
一、準備工作
1.python工作環境
2.ros環境
3.QT designer
二、界面程序設計
1.界面設計
2.ui文件轉py文件
三、上位機程序編寫
1.具體思路
2.
2023-05-09 09:43:340 接上三篇,繼續本項目開發。【CW32飯盒派開發板試用體驗】+機械臂游戲項目(開源)(1)開箱試驗舵機 - 武漢芯源MCU - 電子技術論壇- 廣受歡迎的專業電子論壇! https
2023-05-08 18:40:58
接上兩篇,繼續本項目開發。
機器調試。
機械臂連線。
速度調整。
代碼:
#include \"../inc/main.h\"
int32_t main(void)
{
int
2023-04-28 23:44:42
接上篇:### 【CW32飯盒派開發板試用體驗】+機械臂游戲項目(1)開箱試驗舵機
雖然自己的技術不咋地,自己犧牲休息時間 能支持一點是一點了,只當是和同行互相學習,互相交流經驗啊
2023-04-28 20:27:35
我很高興能得到 CW32飯盒派開發板試用體驗機會,想利用業余時間,做個機械臂游戲項目,用咱們的這個開發板,讓更多的人了解此國產芯片的項目,了解此開發板,此項目開源,可以為更多的工程師上手提供經驗
2023-04-28 20:10:04
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-19 10:05:39
安裝Python解釋器是搭建Python編程環境的第一步。Python解釋器是Python編程語言的核心組件,負責解析和執行Python代碼。在本文中,我們將介紹如何安裝Python解釋器,以便您能夠開始學習和使用Python編程語言。
2023-04-14 12:08:404657 Python是一種高級編程語言,被廣泛用于科學計算、數據分析、人工智能、Web開發等領域。想要學習Python編程,首先需要搭建一個合適的編程環境。本文將為您介紹如何搭建Python編程環境,以便您能夠順利開始學習和使用Python。
2023-04-14 12:07:054287 與部署五、安裝ROS#!/bin/bashset -esudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $
2023-04-03 18:17:58
志同道合的良師益友,成長的道路不再孤單。專屬學習交流群專屬學習直播教學交流一對一的技術輔導交流(職業生涯規劃、技術棧梳理、學習方法交流、模擬面試等等)4 活動計劃要求1)認真填寫報名信息;架構師李肯會負責
2023-04-03 13:31:36
KIT EVAL SERDESUB-913ROS
2023-03-30 11:45:55
 電子發燒友App
電子發燒友App














 工商網監
工商網監
評論