差分編碼器信號(hào)通常用于測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)或線性位置,接收差分編碼器信號(hào)的PLC(可編程邏輯控制器)需要進(jìn)行相應(yīng)的信號(hào)處理才能正確讀取并理解編碼器的輸出。下面是將差分編碼器信號(hào)接入PLC的一般步驟: 1.
2024-03-05 08:42:49 80
80 
如果可以觀察到編碼器的電纜或接線端子,可以根據(jù)其連接方式來(lái)初步判斷輸出類(lèi)型。PNP輸出的編碼器通常會(huì)有三根線(電源正極、負(fù)極、信號(hào)線),而NPN輸出的編碼器通常只有兩根線(信號(hào)線和電源負(fù)極)。
2024-02-26 15:11:09683 差分編碼器信號(hào)通常用于測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)或線性位置,接收差分編碼器信號(hào)的PLC(可編程邏輯控制器)需要進(jìn)行相應(yīng)的信號(hào)處理才能正確讀取并理解編碼器的輸出。
2024-02-26 14:43:57474 視覺(jué)編碼器是一種能夠處理視頻理解任務(wù)的模型,它能夠通過(guò)單一凍結(jié)模型,處理各種視頻理解任務(wù),包括分類(lèi)、本地化、檢索、字幕和問(wèn)答等。
2024-02-26 14:24:40239 按照編碼器支持的分辨率可以把編碼器分成標(biāo)清編碼器、高清編碼器、全高清編碼器,分辨率越高幀率越高視頻就越清楚。 1.編碼器的分辨率是什么意思 編碼器的分辨率是指編碼器以每旋轉(zhuǎn)360度提供
2024-02-21 18:07:31492 
編碼器零點(diǎn)位置怎么看 要確定編碼器的零點(diǎn)位置,可以通過(guò)以下幾種方式進(jìn)行觀察: 1. 物理標(biāo)記點(diǎn):一些編碼器在其旋轉(zhuǎn)軸上具有專(zhuān)門(mén)的物理標(biāo)記點(diǎn),例如凹槽或凸起。通過(guò)觀察軸上的標(biāo)記點(diǎn),可以確定零點(diǎn)位置
2024-02-18 18:28:19729 
伺服電機(jī)的編碼器是用來(lái)測(cè)量電機(jī)轉(zhuǎn)動(dòng)角度和速度的重要部件。然而,由于長(zhǎng)時(shí)間運(yùn)行、環(huán)境因素等原因,編碼器可能會(huì)出現(xiàn)故障,影響電機(jī)的準(zhǔn)確運(yùn)行。下面將介紹伺服電機(jī)編碼器的故障原因和維修方法,并介紹編碼
2024-02-14 18:06:003214 哈夫曼編碼是一種基于頻率的變長(zhǎng)編碼方式,常用于數(shù)據(jù)壓縮和信息傳輸領(lǐng)域。它是由美國(guó)數(shù)學(xué)家大衛(wèi)·哈夫曼在1952年發(fā)明的,被廣泛應(yīng)用于無(wú)損壓縮領(lǐng)域。 哈夫曼編碼算法的基本思想是根據(jù)字符出現(xiàn)的頻率構(gòu)建一棵
2024-01-30 11:27:10316 器(Autoencoder),它是一種無(wú)監(jiān)督學(xué)習(xí)的神經(jīng)網(wǎng)絡(luò)模型。自動(dòng)編碼器由兩部分組成:編碼器和解碼器。編碼器負(fù)責(zé)將輸入數(shù)據(jù)轉(zhuǎn)換為低維表示,解碼器則將低維表示映射回原始輸入空間。這種結(jié)構(gòu)能夠通過(guò)編碼器的特征提取和表示能力來(lái)壓縮原始數(shù)據(jù)并保持盡可
2024-01-23 10:58:07414 光電編碼器是一種用于測(cè)量和探測(cè)位置、速度和角度的裝置。它利用了光電傳感器和編碼盤(pán)之間的相互作用,將物理位置轉(zhuǎn)化為數(shù)字信號(hào)。光電編碼器常用于機(jī)械自動(dòng)化、機(jī)器人技術(shù)、數(shù)控機(jī)床和精密儀器等領(lǐng)域。 光電
2024-01-22 15:39:39285 磁性編碼器結(jié)構(gòu)及原理,磁性編碼器的結(jié)構(gòu):磁性編碼器由兩個(gè)主要組合而成,讀頭和標(biāo)尺。標(biāo)尺是一個(gè)含有磁性條紋的輪子或桿,而讀頭則固定在機(jī)械裝置上,可以測(cè)量標(biāo)尺相對(duì)于讀頭的位置。標(biāo)尺上的磁條可以是南極
2024-01-22 11:24:40270 
伺服電機(jī)編碼器是一種關(guān)鍵的反饋裝置,用于測(cè)量和控制電機(jī)的轉(zhuǎn)速和位置。在選擇伺服電機(jī)編碼器時(shí),常常面臨一個(gè)選擇:使用磁電編碼器還是光電編碼器。接下來(lái)將從幾個(gè)關(guān)鍵方面比較這兩種類(lèi)型的編碼器,以幫助您做出更明智的選擇。
2024-01-18 10:29:02462 編碼器是一種將機(jī)械運(yùn)動(dòng)轉(zhuǎn)換為數(shù)字電信號(hào)的傳感器。當(dāng)駕駛員想要控制電機(jī)旋轉(zhuǎn)時(shí),U、V、W三相電氣輸出驅(qū)動(dòng)電機(jī)運(yùn)行。為了將電機(jī)轉(zhuǎn)到某個(gè)位置或角度,我們將此位置稱(chēng)為目標(biāo)值。我們需要知道此時(shí)電機(jī)轉(zhuǎn)動(dòng)的幅度
2024-01-17 17:02:12326 
編碼器類(lèi)型1024 A/B和1024 A/B R的區(qū)別是什么呢?
2024-01-09 07:38:18
編碼器分為旋轉(zhuǎn)編碼器和線性編碼器兩種。旋轉(zhuǎn)編碼器用于檢測(cè)旋轉(zhuǎn)位置和速度,而線性編碼器用于檢測(cè)直線位置和速度。
2023-12-22 09:20:04380 
工作原理 ? ? ? 絕對(duì)編碼器光碼盤(pán)上有許多道光通道刻線,每道刻線依次以2線、4線、8線、16線編排,在編碼器的每一個(gè)位置,通過(guò)讀取每道刻線的通、暗,獲得一組從2的零次方到2的n-1次方的2進(jìn)制
2023-12-20 08:41:241510 
就介紹如何獲取編碼器的脈沖信號(hào)。 ? ? ? ?一、使用示波器獲取脈沖信號(hào) ? ? ? ?1、將示波器連接到編碼器輸出端口,并選擇合適的觸發(fā)模式和時(shí)間基準(zhǔn)。隨后,運(yùn)行機(jī)械設(shè)備并觀察示波器上顯示的脈沖信號(hào)波形。 ? ? ? ?2、根據(jù)觀察示波器
2023-12-19 08:36:50406 
請(qǐng)問(wèn)各位1331.051-1024與1331.061-1024編碼器有什么區(qū)別嗎?可以互換嗎?謝謝
2023-12-18 06:34:57
由編碼器控制的電位計(jì)
2023-12-14 11:35:29247 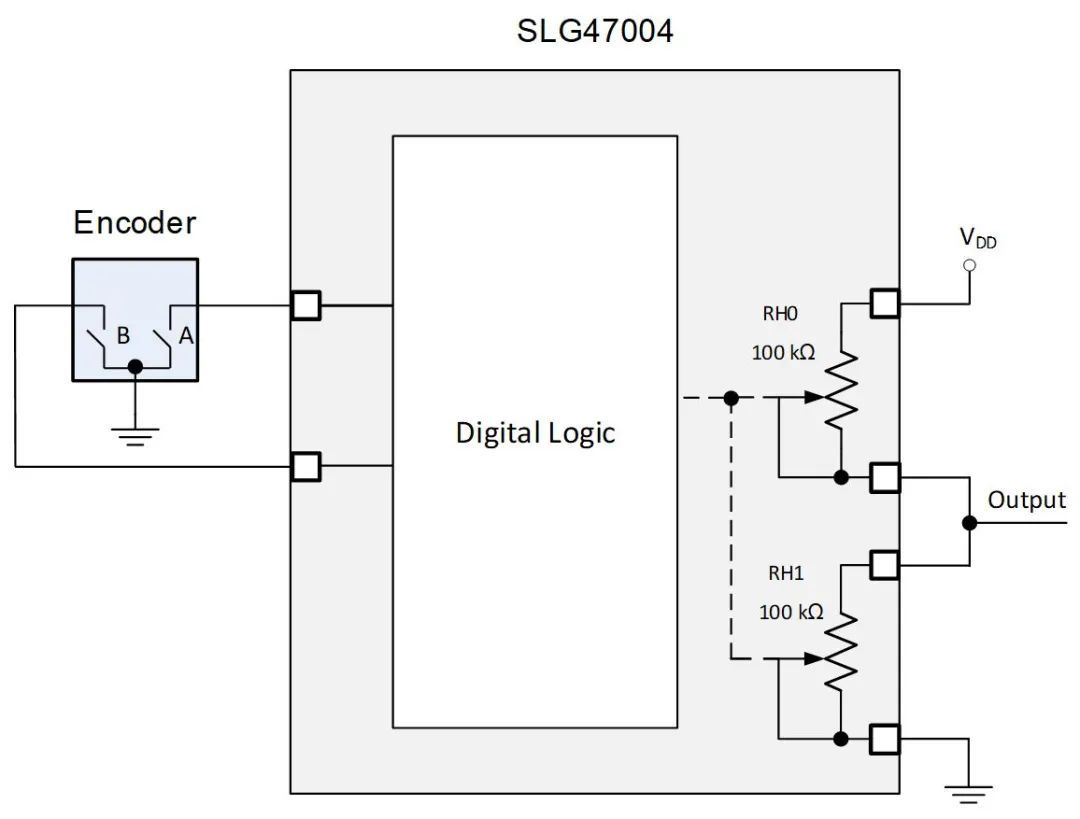
編碼器有兩種方式檢測(cè)位移和位置信息:相對(duì)位置檢測(cè)與絕對(duì)位置檢測(cè)。相對(duì)位置的檢測(cè)方法為增量式,絕對(duì)位置的檢測(cè)方法包括絕對(duì)式和偽絕對(duì)式。相對(duì)式和絕對(duì)式各有優(yōu)缺點(diǎn),建議大家根據(jù)“測(cè)量目的”正確選用。
2023-12-13 16:55:13477 
編碼器(encoder)是將信號(hào)(如比特流)或數(shù)據(jù)進(jìn)行編制、轉(zhuǎn)換為可用以通訊、傳輸和存儲(chǔ)的信號(hào)形式的設(shè)備。編碼器把角位移或直線位移轉(zhuǎn)換成電信號(hào),前者稱(chēng)為碼盤(pán),后者稱(chēng)為碼尺。按照讀出方式編碼器可以分為
2023-12-13 08:40:16436 前面介紹過(guò),調(diào)制解調(diào)之前還需要編碼,但編碼根據(jù)用途來(lái)分有信源編碼與信道編碼。本編的主要內(nèi)容是介紹幾種信源編碼技術(shù),需要注意的是用于信源編碼的技術(shù)有些也可以用于信道編碼,比如最后一點(diǎn)介紹的循環(huán)碼。感覺(jué)有些別扭的是,居然順便科普了一下加密技術(shù)。
2023-11-27 10:05:07226 
編碼器:互補(bǔ)輸出和推挽式輸出的區(qū)別:編碼器是很常見(jiàn)的一種電子元器件,能將旋轉(zhuǎn)位置或線性位置轉(zhuǎn)換成數(shù)字信號(hào)輸出。在編碼器輸出的信號(hào)中,互補(bǔ)輸出和推挽式輸出是兩種比較常見(jiàn)的形式.
2023-11-23 13:53:391024 
編碼: 曼徹斯特編碼是一種非歸零編碼(Non-Return-to-Zero code),它將每個(gè)數(shù)據(jù)位劃分為兩個(gè)時(shí)間段。在第一個(gè)時(shí)間段,信號(hào)的電壓保持不變;而在第二個(gè)時(shí)間段,信號(hào)的電壓會(huì)反轉(zhuǎn)。具體來(lái)說(shuō),當(dāng)要傳輸?shù)臄?shù)據(jù)位為0時(shí),第一個(gè)時(shí)間段信號(hào)電壓
2023-11-22 16:37:452843 信號(hào)的電平和反向來(lái)表示數(shù)據(jù)的二進(jìn)制位,具有自同步性和抗干擾能力強(qiáng)的特點(diǎn)。 在差分曼徹斯特編碼中,每個(gè)數(shù)據(jù)位都被編碼成兩個(gè)時(shí)間間隔,分別稱(chēng)為一個(gè)時(shí)鐘周期。其中,數(shù)據(jù)位為1時(shí)信號(hào)取反,數(shù)據(jù)位為0時(shí)信號(hào)保持不變。這樣的編碼方式使得在信號(hào)中始終存在電平的變化,
2023-11-22 16:32:331467 什么是曼徹斯特編碼 曼徹斯特編碼的特點(diǎn)是 曼徹斯特編碼在電路中怎么表示 曼徹斯特編碼是一種數(shù)字信號(hào)的編碼方式,用于將二進(jìn)制信號(hào)傳輸在電路中。它的特點(diǎn)是每個(gè)位周期都有一個(gè)信號(hào)變化,使得接收器可以根據(jù)
2023-11-22 16:32:30699 旋轉(zhuǎn)式編碼器可以精確地測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)。它們通常收集關(guān)于繞旋轉(zhuǎn)軸運(yùn)動(dòng)變化的信息。盡管它們非常精確。然而,在為發(fā)動(dòng)機(jī)選擇正確的編碼時(shí),技術(shù)工程師需要考慮對(duì)發(fā)動(dòng)機(jī)性能影響最大的編碼器的五個(gè)主要特性:定位精度、速度穩(wěn)定性、聲音噪聲、功率損耗和帶寬。
2023-11-20 17:46:28298 如題,還是說(shuō)編碼器線分很多種,有什么規(guī)律嗎?求大神指導(dǎo)
2023-11-15 06:04:58
個(gè)人用過(guò)伺服+絕對(duì)值編碼器,也用過(guò)變頻+絕對(duì)值編碼器,感覺(jué)沒(méi)什么區(qū)別,首先在連好電纜后在調(diào)試軟件將編碼器型號(hào)參數(shù)填好\下載,都是用手動(dòng)模式移動(dòng)機(jī)構(gòu)位置,到位后當(dāng)前位置直接標(biāo)零點(diǎn),零點(diǎn)丟了再重新標(biāo)定。大家有用過(guò)這兩種絕對(duì)值編碼器的嗎?有區(qū)別嗎?
2023-11-14 06:53:37
嚴(yán)格來(lái)講,編碼器只會(huì)告訴你改如何定位,要如何執(zhí)行,是需要靠數(shù)控系統(tǒng)(或者PLC或運(yùn)動(dòng)控制器之類(lèi)控制器)控制伺服或者步進(jìn)電機(jī)來(lái)實(shí)現(xiàn)定位的,編碼器好比人的眼睛,知道電機(jī)軸或者負(fù)載處于當(dāng)前某個(gè)位置,工業(yè)
2023-11-13 08:07:17868 
旋轉(zhuǎn)編碼器更換步驟第一步,卸開(kāi)電機(jī)后蓋,編碼器的后蓋。第二步,松開(kāi)編碼器安裝螺絲。第三步,旋轉(zhuǎn)電機(jī)轉(zhuǎn)子軸,使編碼器轉(zhuǎn)子上的標(biāo)志和編碼器殼上的標(biāo)志重合。第四步,卸下編碼器,注意在裝卸的時(shí)候盡量使用特制
2023-11-12 08:07:20756 編碼器種類(lèi)及原理 常見(jiàn)的編碼器有兩種,分別為霍爾編碼器和GMR編碼器。 1.1 霍爾編碼器 霍爾編碼器圓盤(pán)上分布有磁極,當(dāng)圓盤(pán)隨電機(jī)主軸轉(zhuǎn)動(dòng)時(shí),會(huì)輸出兩路相位差90°的方波,用這兩路方波可測(cè)出電機(jī)
2023-11-10 15:21:47803 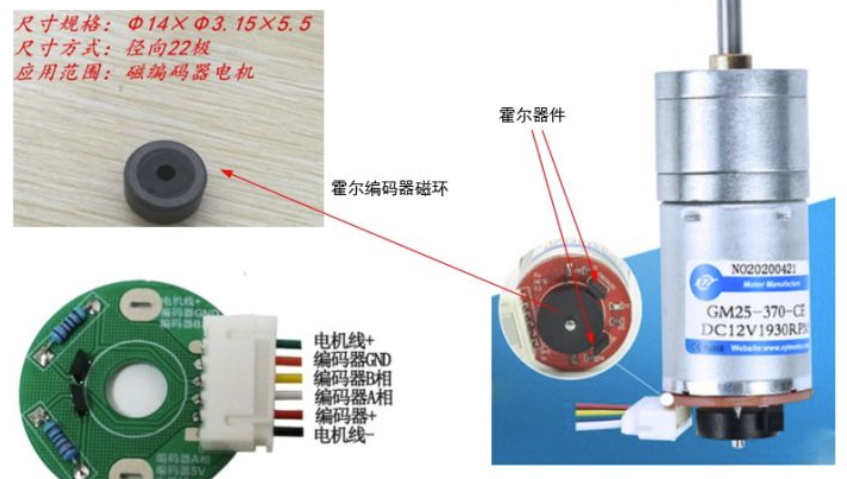
profinet信號(hào)編碼器和profibus信號(hào)編碼器哪個(gè)更好
2023-11-08 13:37:35460 磁性編碼器是一種先進(jìn)的技術(shù)裝置,它通過(guò)利用磁性材料來(lái)實(shí)現(xiàn)精確的編碼功能。無(wú)論在哪個(gè)領(lǐng)域,磁性編碼器都扮演著重要的角色,為各種精密設(shè)備提供準(zhǔn)確的測(cè)量和控制。1、磁性編碼器的結(jié)構(gòu):磁性編碼器由兩個(gè)主要
2023-11-08 11:03:05548 
幀中的位采用**NRZ**(Non-return-to-zero 非歸零)方法編碼。相同帶寬,NRZ編碼信息量更大。
2023-10-31 14:15:17353 
在數(shù)字系統(tǒng)里,常常需要將某一信息(輸入)變換為某一特定的代碼(輸出)。把二進(jìn)制碼按一定的規(guī)律編排,例如8421碼、格雷碼等,使每組代碼具有一特定的含義(代表某個(gè)數(shù)字或控制信號(hào))稱(chēng)為編碼。具有編碼功能
2023-10-27 09:29:492042 
增量式編碼器提供了一種對(duì)連續(xù)位移量離散化、增量化以及位移變化(速度)的傳感方法。增量式編碼器的特點(diǎn)是每產(chǎn)生一個(gè)增量位移就對(duì)應(yīng)于一個(gè)輸出脈沖信號(hào)。增量式編碼器測(cè)量的是相對(duì)于某個(gè)基準(zhǔn)點(diǎn)的相對(duì)位置增量,而不能夠直接檢測(cè)出絕對(duì)位置信息。
2023-10-26 10:44:511960 
磁性編碼器的主要組成部分包括磁阻傳感器、磁鼓和信號(hào)處理電路。
2023-10-24 10:55:331272 
光電編碼器由光源、碼盤(pán)和光電接收器組成,其中碼盤(pán)是編碼器的重要部分。光電編碼器主要用于測(cè)量位移或角度。傳統(tǒng)光電編碼器的碼盤(pán)材料通常有玻璃、金屬和塑料。玻璃碼盤(pán)在玻璃上沉積了非常細(xì)的線條,其耐熱穩(wěn)定性和精度可以達(dá)到一般的標(biāo)準(zhǔn)和需求,但非常容易破裂。
2023-10-24 10:55:201059 
多圈編碼器和單圈編碼器區(qū)別:多圈編碼器一般由兩個(gè)或更多個(gè)同心環(huán)構(gòu)成,每一個(gè)環(huán)上都有一個(gè)光電傳感器和一個(gè)光柵盤(pán)。當(dāng)軸旋轉(zhuǎn)時(shí),每一個(gè)光柵盤(pán)也會(huì)隨之旋轉(zhuǎn),并且通過(guò)光電傳感器產(chǎn)生脈沖信號(hào)。因?yàn)槎嗳?b class="flag-6" style="color: red">編碼器具備高精度、高分辨率等特點(diǎn),所以在必須高精度測(cè)量的場(chǎng)合得到了廣泛的應(yīng)用。比如機(jī)床、印刷機(jī)械等行業(yè)。
2023-10-23 14:14:352121 
在一體式伺服系統(tǒng)中,編碼器起著關(guān)鍵的作用。 它用于測(cè)量伺服電機(jī)的轉(zhuǎn)動(dòng)位置和速度,并將這些信息傳遞給控制器。 編碼器通常采用光電或磁性原理,將轉(zhuǎn)動(dòng)角度轉(zhuǎn)換為數(shù)字信號(hào)。 在一體式伺服系統(tǒng)中,可以使用兩種
2023-10-23 09:50:02561 
霍爾編碼器和光電編碼器有什么區(qū)別
2023-10-12 08:04:53
。事件選擇器編碼為 0表示“無(wú)意義”。任何選定事件發(fā)生時(shí),多個(gè)事件都會(huì)導(dǎo)致計(jì)數(shù)器遞增。 對(duì)任何事件類(lèi)可寫(xiě)的事件掩碼位對(duì)所有類(lèi)都是可寫(xiě)的。設(shè)置與表 20中定義的事件不對(duì)應(yīng)的事件掩碼位對(duì)當(dāng)前實(shí)現(xiàn)沒(méi)有影響。但是,未來(lái)的實(shí)現(xiàn)可能會(huì)在該編碼空間中定義新
2023-09-27 16:32:24358 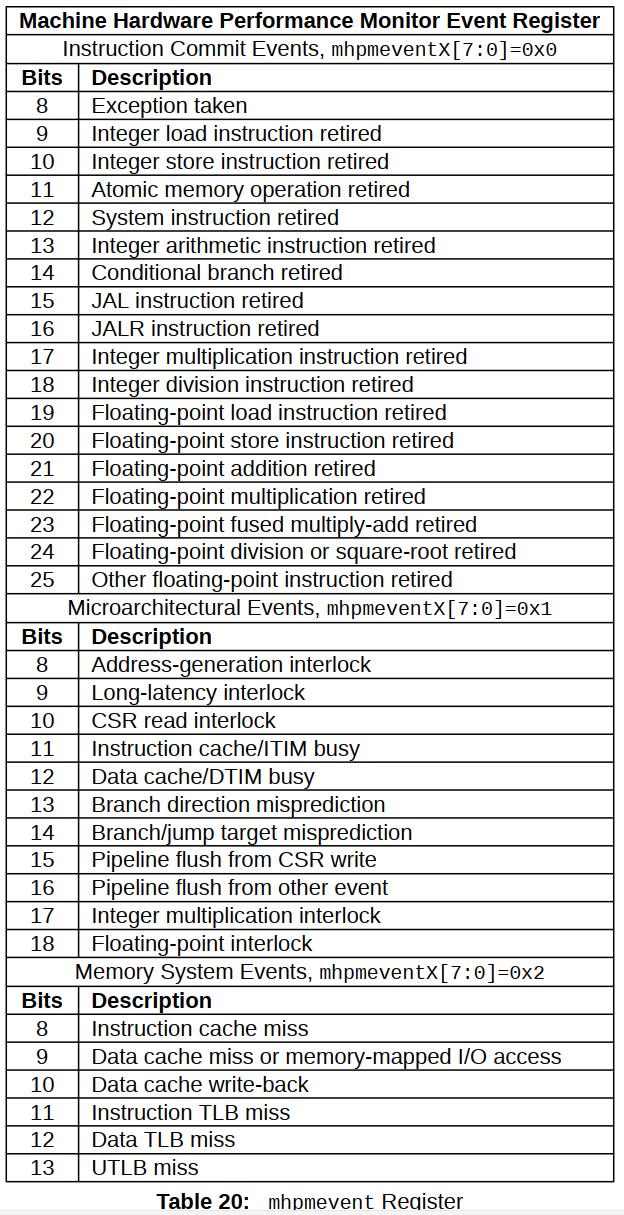
15年左右行業(yè)內(nèi)開(kāi)始掀起風(fēng)磁編碼器替代光電編碼器,而且在22年的時(shí)候國(guó)內(nèi)幾家磁編發(fā)展迅速取得了很大的成績(jī),可是23年開(kāi)始隨著光電編碼成本的下調(diào)技術(shù)的革新,又有客戶(hù)回歸到用光電的技術(shù)。
是不是現(xiàn)在達(dá)到一個(gè)平衡點(diǎn)了?還是說(shuō)磁編還有突破的空間?
2023-09-26 13:03:43
伺服電機(jī)編碼器原理 伺服編碼器這個(gè)基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號(hào),除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機(jī)多數(shù)為同步電機(jī)
2023-09-25 14:07:17974 伺服編碼器這個(gè)基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號(hào),除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機(jī)多數(shù)為同步電機(jī),同步電機(jī)啟動(dòng)的時(shí)候需要
2023-09-22 14:19:58497 編碼器常見(jiàn)故障有哪些? 編碼器出現(xiàn)故障時(shí),專(zhuān)業(yè)維修編碼器廣東技標(biāo)資深維修技術(shù)師會(huì)先進(jìn)行分析故障發(fā)生在哪個(gè)部位,查出故障出現(xiàn)原始位在哪,從而進(jìn)行維修工作。 如: 1、編碼器本身故障:是指編碼器本身
2023-09-22 14:16:22830 編碼器(encoder)是將信號(hào)(如比特流)或數(shù)據(jù)進(jìn)行編制、轉(zhuǎn)換為可用以通訊、傳輸和存儲(chǔ)的信號(hào)形式的設(shè)備。編碼器把角位移或直線位移轉(zhuǎn)換成電信號(hào),前者稱(chēng)為碼盤(pán),后者稱(chēng)為碼尺。按照讀出方式編碼器可以分為
2023-09-22 08:08:551190 在速度、距離和方向反饋系統(tǒng)中,編碼器必須充分利用其功能。簡(jiǎn)而言之,編碼器主要檢測(cè)和控制可用于調(diào)整或監(jiān)控傳輸?shù)倪\(yùn)動(dòng)傳感器。編碼器:通常用于精確測(cè)量線性或旋轉(zhuǎn)運(yùn)動(dòng)。不同的應(yīng)用場(chǎng)景因設(shè)計(jì)和通信方式而異
2023-09-10 08:08:441295 數(shù)字視頻監(jiān)控系統(tǒng)需要音頻功能,音頻功能包括音頻輸入和輸出功能,輸入功能是對(duì)前端的音頻輸入進(jìn)行與視頻同步的錄音,輸出功能指控制中心可以對(duì)前端現(xiàn)場(chǎng)進(jìn)行音頻廣播輸出。目前主流編碼器具有與視頻通道相當(dāng)
2023-08-25 11:11:55400 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來(lái)測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來(lái)分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場(chǎng)上
2023-08-25 08:09:031589 伺服編碼器這個(gè)基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號(hào),除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機(jī)多數(shù)為同步電機(jī),同步電機(jī)啟動(dòng)的時(shí)候需要
2023-08-23 10:58:11888 編碼器常見(jiàn)故障有哪些? 編碼器出現(xiàn)故障時(shí),專(zhuān)業(yè)維修編碼器廣東技標(biāo)資深維修技術(shù)師會(huì)先進(jìn)行分析故障發(fā)生在哪個(gè)部位,查出故障出現(xiàn)原始位在哪,從而進(jìn)行維修工作。 如: 1、編碼器本身故障:是指編碼器本身
2023-08-23 10:49:241068 關(guān)鍵詞:壓差傳感器、編碼 壓差傳感器如何進(jìn)行編碼呢? 后方自帶編碼開(kāi)關(guān),采用二進(jìn)制編碼,無(wú)需使用編碼器進(jìn)行編碼,需要編碼的時(shí)候,只需撥動(dòng)開(kāi)關(guān)即可完成編碼,方便又快捷。下面給大家分享一下編碼對(duì)照表: 審核編輯 黃宇
2023-08-22 11:47:24383 
一種將角位移或者角速度轉(zhuǎn)換成一連串電數(shù)字脈沖的旋轉(zhuǎn)式傳感器,我們可以通過(guò)編碼器測(cè)量到位移或者速度信息。編碼器通常由一個(gè)旋轉(zhuǎn)部分和一個(gè)固定部分組成,旋轉(zhuǎn)部分隨著被測(cè)量的物體進(jìn)行旋轉(zhuǎn),固定部分則保持不動(dòng)。當(dāng)旋轉(zhuǎn)部分發(fā)生旋轉(zhuǎn)時(shí),編碼器會(huì)產(chǎn)生一系列的電數(shù)字脈沖信號(hào),這些脈沖信號(hào)可以用來(lái)確定旋轉(zhuǎn)角度或角速度。
2023-08-21 11:50:005002 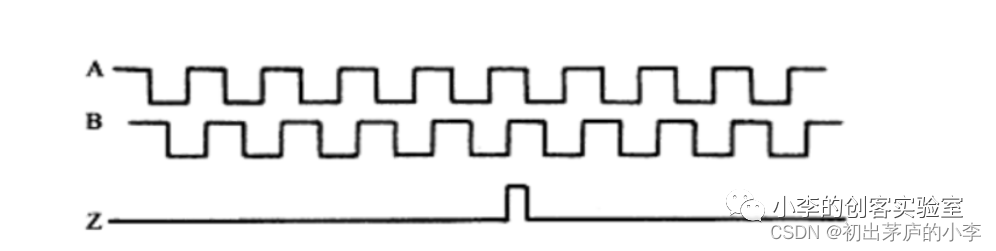
編碼器+NVR應(yīng)用 "編碼器+NVR"的架構(gòu)是全數(shù)字網(wǎng)絡(luò)視頻監(jiān)控系統(tǒng)構(gòu)成模式,一般新建項(xiàng)目均采用此架構(gòu)。此種架構(gòu)下,視頻編碼器分布在前端各個(gè)監(jiān)控點(diǎn),然后連接攝像機(jī)視頻輸出及其他輔助輸入輸出信號(hào),實(shí)現(xiàn)
2023-08-17 10:22:54300 CANopen編碼器是一種常見(jiàn)的工業(yè)自動(dòng)化設(shè)備,廣泛應(yīng)用于工業(yè)控制領(lǐng)域。它采用CANopen通信協(xié)議,可實(shí)現(xiàn)編碼器與各種控制器的快速連接,從而實(shí)現(xiàn)精確的位置檢測(cè)和運(yùn)動(dòng)控制。CANopen編碼器性能穩(wěn)定,安裝簡(jiǎn)便,使用方便,具有很高的可靠性和耐用性。
2023-08-09 15:29:33880 
RADIO ENERGIE雷恩通孔編碼器擁有先進(jìn)的技術(shù)和創(chuàng)新的設(shè)計(jì),能夠滿(mǎn)足日益增長(zhǎng)的通信需求。它采用了先進(jìn)的編碼算法,能夠在數(shù)據(jù)傳輸過(guò)程中實(shí)現(xiàn)高效、可靠的編碼和解碼。同時(shí),通孔技術(shù)的應(yīng)用使得編碼器具有更高的傳輸速度,能夠快速處理大量的數(shù)據(jù)。
2023-08-03 14:59:01536 
本指南總結(jié)了可伸縮矢量擴(kuò)展(SVE)編碼和霓虹燈編碼之間的重要區(qū)別。對(duì)于已經(jīng)將應(yīng)用程序移植到Armv8-A Neon硬件的用戶(hù),本指南還強(qiáng)調(diào)了將應(yīng)用程序遷移到SVE時(shí)需要考慮的關(guān)鍵差異。
Arm
2023-08-02 18:35:52
換編碼器要注意,編碼器裝好固定螺絲后,一定要將聯(lián)軸器上的頂絲松了后消除裝配應(yīng)力造成的卡阻現(xiàn)象,用手轉(zhuǎn)動(dòng)靈活后在將頂絲頂死。
2023-07-26 10:05:374682 增量式編碼器的分辨率是以編碼器軸轉(zhuǎn)動(dòng)一周所產(chǎn)生的輸出信號(hào)基本周期數(shù)來(lái)表示的,即脈沖數(shù)/轉(zhuǎn)(PPR)。本文主要介紹選擇增量編碼器分辨率的方法以及影響增量式編碼器分辨率的因素。
2023-07-26 09:59:56726 絕對(duì)值編碼器是一種用于測(cè)量旋轉(zhuǎn)位置或線性位移的傳感器。與增量編碼器不同,絕對(duì)值編碼器可以提供特定位置的唯一輸出值,而不需要進(jìn)行校準(zhǔn)。這使得絕對(duì)值編碼器在需要高精度位置測(cè)量的應(yīng)用中非常有用,例如機(jī)器人、自動(dòng)化系統(tǒng)和醫(yī)療設(shè)備。
2023-07-26 09:53:329949 光電編碼器的使用場(chǎng)合很多,很多地方都可以用到,進(jìn)行角度測(cè)量,長(zhǎng)度測(cè)量,速度測(cè)量,位置測(cè)量都可以,本文將詳細(xì)介紹如何選擇光電編碼器以及選擇光電編碼器是需要考慮的因素。
2023-07-21 14:38:20693 編碼器好壞怎么來(lái)判斷:判斷一個(gè)編碼器的好壞需要綜合考慮其基本參數(shù)、測(cè)試數(shù)據(jù)、可靠性和耐久性等因素。在選擇和使用編碼器時(shí),應(yīng)了解其基本特性,進(jìn)行科學(xué)合理的測(cè)試和比較,并在使用中進(jìn)行積極的維護(hù)和保養(yǎng),以確保其能夠穩(wěn)定可靠地工作,為機(jī)械系統(tǒng)的正常運(yùn)行提供有力支持。
2023-07-17 15:06:492774 
我們知道編碼器的種類(lèi)有很多,什么增量式編碼器、絕對(duì)值編碼器、光電編碼器、旋轉(zhuǎn)編碼器等等。
2023-07-13 14:26:194176 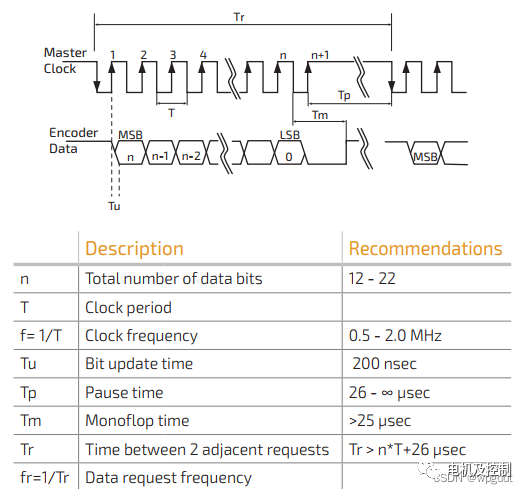
單圈和多圈編碼器是用于測(cè)量伺服電機(jī)轉(zhuǎn)動(dòng)位置的裝置,它們之間的區(qū)別主要在于測(cè)量范圍和精度: 單圈編碼器:?jiǎn)稳?b class="flag-6" style="color: red">編碼器只能測(cè)量一圈(360度)的轉(zhuǎn)動(dòng)位置。它通常由光電傳感器或磁性傳感器組成,可以提供較為
2023-07-12 08:15:061294 光學(xué)式絕對(duì)型編碼器中也有一個(gè)會(huì)和主軸同步旋轉(zhuǎn)的圓編碼盤(pán),盤(pán)中有分為許多同心圓狀的透明及不透明的區(qū)域,盤(pán)的兩側(cè)分別有光源及光傳感器數(shù)組,光源穿過(guò)編碼盤(pán)后,被光傳感器采集,采集的信息直接代表了轉(zhuǎn)軸的位置;
2023-07-09 16:07:102441 
UNICODE字符串可以與任意字符編碼的字節(jié)進(jìn)行相互轉(zhuǎn)換,如圖: 那么大家很容易想到一個(gè)問(wèn)題,就是不同的字符編碼的字節(jié)可以通過(guò)Unicode相互轉(zhuǎn)換嗎?答案是肯定的。 Python2中的字符串進(jìn)行
2023-07-05 16:25:23791 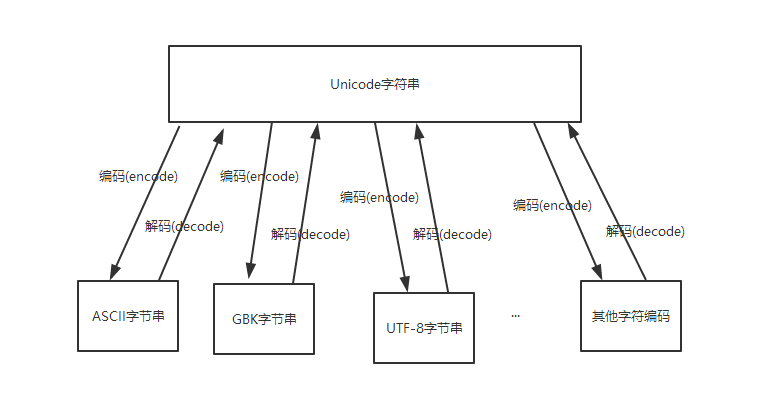
####1. Python源代碼文件的執(zhí)行過(guò)程 我們都知道,磁盤(pán)上的文件都是以二進(jìn)制格式存放的,其中文本文件都是以某種特定編碼的字節(jié)形式存放的。對(duì)于程序源代碼文件的字符編碼是由編輯器指定的,比如
2023-07-05 16:11:02827 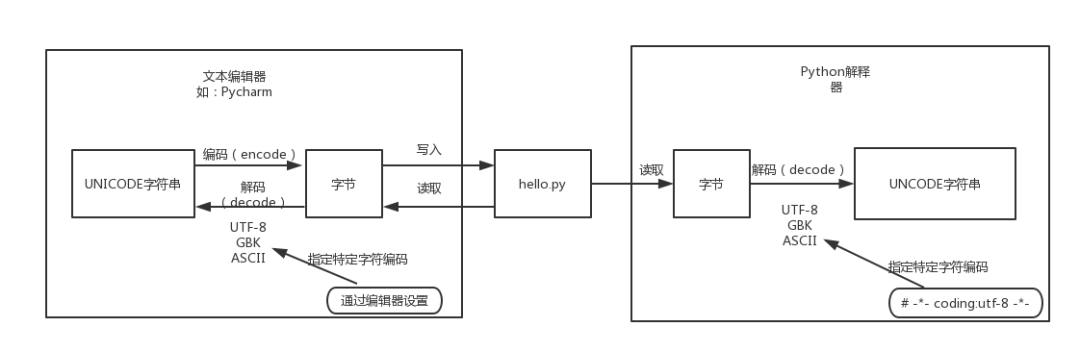
換編碼器后要怎么調(diào)零:更換編碼器后,需要將機(jī)器重新調(diào)零以確保精準(zhǔn)度。調(diào)零過(guò)程可以分為幾個(gè)步驟。首先需要檢查新編碼器是否正確接線,確保信號(hào)可以正常傳輸。接著可以通過(guò)手動(dòng)操作機(jī)械臂或軸來(lái)確定當(dāng)前位置
2023-07-05 14:10:503351 
什么是PN編碼器?PN編碼器主要應(yīng)用與優(yōu)點(diǎn):PN編碼器具有很多優(yōu)點(diǎn)。首先,它可以將原始信號(hào)進(jìn)行變換編碼,從而增加了發(fā)送信號(hào)的保密性。其次,它可以通過(guò)事先協(xié)定好的代碼進(jìn)行解碼,提高了數(shù)據(jù)傳輸?shù)臏?zhǔn)確性
2023-07-05 13:55:521297 增量式編碼器和絕對(duì)值編碼器有哪些區(qū)別?增量式編碼器通過(guò)對(duì)變化量進(jìn)行計(jì)數(shù)來(lái)測(cè)量位置變化,而絕對(duì)值編碼器可提供實(shí)際位置值。因此,增量式編碼器對(duì)于測(cè)量無(wú)限循環(huán)的運(yùn)動(dòng)比較有用,因?yàn)樗鼈兛梢允褂糜?jì)數(shù)器來(lái)跟蹤旋轉(zhuǎn)次數(shù)和速度。相比之下,絕對(duì)值編碼器適用于任務(wù)需要直接獲得位置信息的情景,如機(jī)器人運(yùn)動(dòng)。
2023-07-05 13:34:282245 
有關(guān)編碼器的知識(shí),編碼器有不同的模塊,在使用編碼器時(shí)這些模塊怎么用,在操作時(shí)要注意什么問(wèn)題,以下介紹了編碼器模塊的讀碼、地址碼寫(xiě)入等操作,一起來(lái)了解下。 1、讀碼 (1)按下讀碼鍵,液晶屏上顯示
2023-06-26 17:32:521669 信道編碼可以通過(guò)增加編碼速率和加入糾錯(cuò)碼的方式來(lái)提高信道傳輸?shù)目煽啃浴F渲校?b class="flag-6" style="color: red">編碼速率是指在一定時(shí)間內(nèi)發(fā)送的編碼比特?cái)?shù),而糾錯(cuò)碼則是指在編碼數(shù)據(jù)中加入的一些冗余信息,以便于檢測(cè)和糾正傳輸中的錯(cuò)誤。
2023-06-26 17:08:10768 伺服電機(jī)編碼器 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來(lái)測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來(lái)分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2023-06-26 14:01:01899 請(qǐng)問(wèn)這是什么編碼,無(wú)法正確解析,,*附件:這是什么編碼 文件夾2013.rar
2023-06-21 09:21:14
編碼器的作用和功能:編碼器是一種常用的電子元件,其作用是將模擬信號(hào)轉(zhuǎn)換為數(shù)字信號(hào)或者將數(shù)字信號(hào)進(jìn)行編碼。其主要功能是將輸入信號(hào)進(jìn)行分析和處理,并將其轉(zhuǎn)換為數(shù)字信號(hào),以便于在數(shù)字系統(tǒng)中進(jìn)行處理及儲(chǔ)存。同時(shí),編碼器還具備將數(shù)字信號(hào)從一種編碼方式轉(zhuǎn)換為另一種編碼方式的功能。
2023-06-14 09:22:276661 
光電編碼器是什么?光電編碼器原理應(yīng)用與優(yōu)缺點(diǎn):光電編碼器是一種常用的位置傳感器,其特性主要包括高精度、高分辨率、穩(wěn)定性好等。光電編碼器通過(guò)使用一系列的光柵刻痕和光電傳感器,可以測(cè)量旋轉(zhuǎn)物體或者單一
2023-06-14 09:13:052051 
————虹科&Micronor——————虹科干貨——絕對(duì)式編碼器和增量式編碼器的區(qū)別純光學(xué)無(wú)源設(shè)計(jì)|應(yīng)用于各種惡劣環(huán)境PART1什么是編碼器?編碼器可用作旋轉(zhuǎn)角度的光學(xué)或機(jī)械傳感器。因此
2023-05-31 16:04:58401 
什么是拉繩編碼器?拉繩編碼器是一種廣泛應(yīng)用于工業(yè)領(lǐng)域的傳感器裝置。它的作用是將機(jī)械運(yùn)動(dòng)轉(zhuǎn)化為電信號(hào),以便測(cè)量和監(jiān)測(cè)各種參數(shù)。拉繩編碼器的工作原理基于拉繩與編碼器之間的相互作用。拉繩通過(guò)連接到被測(cè)物體
2023-05-29 09:23:211991 
旋轉(zhuǎn)編碼器是什么?淺讀旋轉(zhuǎn)編碼器工作原理與特點(diǎn)及應(yīng)用:旋轉(zhuǎn)編碼器是一種常見(jiàn)的傳感器,它能夠通過(guò)檢測(cè)旋轉(zhuǎn)軸的轉(zhuǎn)動(dòng)實(shí)現(xiàn)實(shí)時(shí)位置監(jiān)測(cè)與控制。它具有高精度、長(zhǎng)壽命、可重復(fù)性高、體積小等特點(diǎn),因此在機(jī)器人控制、自動(dòng)化生產(chǎn)、醫(yī)療設(shè)備、輪廓檢測(cè)等方面被廣泛應(yīng)用。
2023-05-29 09:21:152027 
在不同的工作領(lǐng)域和工作中,需要使用對(duì)應(yīng)的工具和產(chǎn)品。在處理具有旋轉(zhuǎn)角度編碼器的工作任務(wù)時(shí),了解所需工具的類(lèi)型是必要的。除了絕對(duì)值編碼器外,還有增量式編碼器,二者有什么區(qū)別呢?有什么特征、適合什么樣的應(yīng)用呢?這邊文章給您答案
2023-05-26 10:51:401705 編碼器種類(lèi)及型號(hào):最常見(jiàn)的編碼器類(lèi)型是旋轉(zhuǎn)編碼器和線性編碼器。旋轉(zhuǎn)編碼器通常用于測(cè)量機(jī)器人的關(guān)節(jié)位置,以及測(cè)量車(chē)輛和船只的轉(zhuǎn)向角度。線性編碼器通常用于測(cè)量運(yùn)動(dòng)平臺(tái)的位置和速度。旋轉(zhuǎn)編碼器和線性編碼器可以分為絕對(duì)式和增量式編碼器。絕對(duì)式編碼器可以直接讀取位置信息,而增量式編碼器則需要計(jì)算位置信息。
2023-05-18 11:15:003455 編碼器是什么?編碼器有哪些分類(lèi)及應(yīng)用;編碼器是什么?在數(shù)字信號(hào)處理和通信系統(tǒng)中,編碼器是一種重要的設(shè)備,用于將原始數(shù)據(jù)轉(zhuǎn)換為字符序列或二進(jìn)制碼序列。編碼器是一種可以同時(shí)測(cè)量物體位置和方向的蒿精度
2023-05-18 11:08:473133 
編碼器廠家; 編碼器是一種用于測(cè)量電機(jī)或電動(dòng)機(jī)的移動(dòng)位置、速度和方向的設(shè)備。在現(xiàn)代工業(yè)自動(dòng)化中,編碼器被廣泛應(yīng)用于機(jī)器人、CNC機(jī)床、印刷機(jī)等機(jī)械設(shè)備中。隨著市場(chǎng)對(duì)生產(chǎn)效率的要求越來(lái)越高,編碼器成為
2023-05-18 11:08:045269 信道編碼可以通過(guò)增加編碼速率和加入糾錯(cuò)碼的方式來(lái)提高信道傳輸?shù)目煽啃浴F渲校?b class="flag-6" style="color: red">編碼速率是指在一定時(shí)間內(nèi)發(fā)送的編碼比特?cái)?shù),而糾錯(cuò)碼則是指在編碼數(shù)據(jù)中加入的一些冗余信息,以便于檢測(cè)和糾正傳輸中的錯(cuò)誤。
2023-05-10 18:22:433091 信道編碼的碼率是指在一定時(shí)間內(nèi)發(fā)送的編碼比特?cái)?shù)。碼率越高,數(shù)據(jù)傳輸速度越快,但編碼效率越低;反之,碼率越低,編碼效率越高,但數(shù)據(jù)傳輸速度越慢。
2023-05-10 18:19:066952 增量型編碼器與絕對(duì)值型編碼器怎么選擇?在進(jìn)行編碼器選擇時(shí),增量型編碼器和絕對(duì)值型編碼器是兩種常見(jiàn)的選擇。增量型編碼器是一種基于脈沖計(jì)數(shù)的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優(yōu)點(diǎn)
2023-05-08 11:28:331340 
單圈絕對(duì)值編碼器 PVS78E Mining 旋轉(zhuǎn)編碼是用于檢測(cè)旋轉(zhuǎn)角度及其衍生機(jī)械參數(shù)的一類(lèi)傳感器,包括速度和加速度等,可檢測(cè)旋轉(zhuǎn)、直線等傳動(dòng)運(yùn)動(dòng)。由于應(yīng)用廣泛,現(xiàn)代旋轉(zhuǎn)編碼器可見(jiàn)于諸多機(jī)械
2023-04-25 14:16:582245 周期范圍內(nèi)不會(huì)出現(xiàn)重復(fù)的信號(hào)輸出,每個(gè)角度的位置編碼都是獨(dú)一無(wú)二的。絕對(duì)編碼器有單圈與多圈之分,而單圈與多圈絕對(duì)值編碼器的區(qū)別,僅僅是在角度位置編碼輸出量程上的不同而已,前者的量程只有一圈,而后者可以
2023-04-20 16:19:54
增量式編碼器一般分為3種類(lèi)型:?jiǎn)瓮ǖ涝隽渴?b class="flag-6" style="color: red">編碼器,雙通道增量式編碼器,三通道增量式編碼器。
2023-04-17 09:43:143768 有沒(méi)有編碼器結(jié)構(gòu)是區(qū)別于伺服系統(tǒng)和普通電機(jī)的第一要素,它可以讓電機(jī)實(shí)現(xiàn)閉環(huán)控制,讓其有更高的控制精度,應(yīng)對(duì)更為苛刻的控制項(xiàng)目。目前,最為常見(jiàn)的伺服編碼器主要有增量式和絕對(duì)值式兩大類(lèi),它們的不同在
2023-04-12 09:05:025850 分地開(kāi)通若干個(gè)長(zhǎng)方形孔。由于光電碼盤(pán)與電動(dòng)機(jī)同軸,電動(dòng)機(jī)旋轉(zhuǎn)時(shí),光柵盤(pán)與電動(dòng)機(jī)同速旋轉(zhuǎn),經(jīng)發(fā)光二極管等電子元件組成的檢測(cè)裝置檢測(cè)輸出若干脈沖信號(hào),通過(guò)計(jì)算每秒光電編碼器輸出脈沖的個(gè)數(shù)就能反映當(dāng)前電動(dòng)機(jī)
2023-03-30 14:57:12
隨著工業(yè)4.0發(fā)展需求,工業(yè)機(jī)器人產(chǎn)業(yè)前所未有的崛起,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演者重要角色,這樣一來(lái)編碼器重要性尤為突出,下面讓我?guī)Т蠹艺J(rèn)識(shí)一下絕對(duì)編碼器與增量編碼器。
2023-03-28 09:33:31704 隨著工業(yè)4.0發(fā)展需求,工業(yè)機(jī)器人產(chǎn)業(yè)前所未有的崛起,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演者重要角色,這樣一來(lái)編碼器重要性尤為突出,下面讓我?guī)Т蠹艺J(rèn)識(shí)一下絕對(duì)編碼器與增量編碼器。
2023-03-28 09:27:19551 視頻編碼描述了將原始視頻轉(zhuǎn)換為壓縮數(shù)字格式以通過(guò)互聯(lián)網(wǎng)高效交付的過(guò)程。編碼在捕獲視頻流后立即發(fā)生,并且在所有實(shí)時(shí)流式處理工作流中起著至關(guān)重要的作用。
2023-03-23 09:52:509607
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論