 電子發燒友App
電子發燒友App


在哈薩克斯坦,這是首次使用無人機進行航空磁測量。本次研究采用銣泵浦磁力儀,旋翼型無人機作為載體平臺。革命性的新型航空磁系統結合了無人機的可操作性和磁測設備的高靈敏度。該系統可以在極低的海拔、平坦的地形和困難的地形條件下進行詳細的地形測量。由于這項新技術,可以將測量的細節水平和性能提高十倍,大大提高磁測量的精度,原則上已經可以利用階梯高度測量進行磁場體積研究。
磁法勘探被認為是地球物理勘探中最有效的方法之一,并被廣泛應用于地質勘探的各個階段:尋找鐵礦和其他礦物(包括碳氫化合物)、地質填圖、構造研究等。高精度精密磁力測量在考古調查和工程測量中同樣發揮著重要的作用。有系統地將磁力計用于勘探目的可以追溯到上個世紀初。1919年,在I.M. Gubkin院士、P.P. Lazarev工程師和a.c. Arkhangelsky工程師的領導下,開始了對庫爾斯克磁異常的系統研究,隨后在俄羅斯的庫爾斯克、別爾哥羅德和奧廖爾地區發現了獨特的磁鐵礦鐵質石英巖礦床。自上世紀40年代以來,哈薩克斯坦共和國的領土通過比例尺1:100萬至1:20萬的區域磁測進行了系統的研究,領土的大部分地區通過比例尺1:50000、1:25000和1:10000的詳細測量進行了研究。 然而隨著時間推移,地磁在地質勘探中的重要性不但沒有減少,人們對它的興趣在逐年增加。
在這些年的技術發展中,至少使用了四種類型的磁力儀。在第一階段,光機平衡磁力計使用了50多年。隨后,磁通門、質子和光泵磁力計被研制出來。目前,磁勘探主要采用核進動(質子)磁力計和光泵磁力計。針對各種測量條件,地面、井下、海上和空中作業用的專用磁力儀被大量生產。
由于性能高、精度高,航空磁學研究是磁學研究的主要部分。現代光泵磁力計具有高分辨率(靈敏度可達0.001 nT)和高性能(每秒可達100次測量)的特點,確保了磁場記錄精度0.2-0.5 nT,使用標準空中平臺時觀測點之間的距離約為0.5 - 1m。采用差分數據平差的現代GPS導航系統可以獲得亞米精度的觀測點位置。而精確的標記又可大大降低航磁測量的總體誤差,并可構建精度無與倫比的磁場圖。航空磁測在研究足夠大的區域時是最有效益的——最初的一千平方公里或更大的區域。當研究相對較小的區域(幾十/ 100平方公里)時,由于設備和飛機租賃的成本占很大比例,調查的運行公里成本急劇增加,動員/遣散,有時從基地到調查地點的大量非生產性飛行,等等,因此,由于性能較低,該區域的研究使用了徒步磁力計,其性能水平勉強可接受,但精度大大低于航空磁力計。
利用快速發展的無人機航磁測量技術,可以較好地解決小區域磁勘探所面臨的問題。重量不到一公斤的小型高精度高速磁測系統的開發,一系列無人機的廣泛生產,導致了一種全新的航空磁測技術的發展,它結合了無人機的高機動性和磁測設備的高靈敏度。因此,磁測量的細節水平提高了許多倍。
目前,正在積極開展超輕型航空磁系統工業樣品的制作和測試工作。在俄羅斯聯邦,Geoscan LLC、伊爾庫茨克國立技術研究大學俄羅斯科學院西伯利亞分院特羅菲穆克石油地質與地球物理研究所(Trofimuk Institute of Petroleum Geology and Geophysics)正在研究這個問題,加拿大和世界其他國家也在進行類似的研究。在哈薩克斯坦,SPC Geoken LLP于2017年9月至10月進行了使用無人機進行的航空磁測技術的首次測試。試驗工作與Kazzinc LLP的地質勘探部門和俄羅斯公司Geoscan LLC合作進行,Geoscan LLC公司提供了一個基于無人機和光泵磁力計的航空磁測系統。
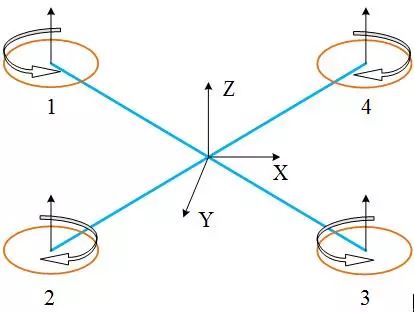
多旋翼型無人機- Geoscan 401四軸飛行器-被用作勘測的空中平臺(圖1)。

圖1 無人機- geoscan401四軸飛行器
四軸飛行器配備有自動控制系統(自動駕駛儀)、慣性導航系統、雙系統(GPS/GLONASS)導航接收機、工作負載控制單元和用于傳輸指令和遙測數據的數字通信通道。無人機由基于一臺筆記本電腦和Geoscan Planner軟件的地面控制站(GCS)控制。GCS能夠準備飛行任務,監視和控制飛行和顯示從UAV獲得的遙測數據。起飛、根據飛行任務在測量航線上工作、降落均在自動模式下進行,操作員可及時更改飛行任務。無人機與地面站通過數字通信信道連接。所有來自無人機的數據-坐標,航向,滾轉,俯仰,速度,電池剩余電量等-在GCS實時顯示。
無人機由鋰聚合物電池供電。四軸飛行器最大水平速度為50 km/h (14 m/s),航磁測量以36 km/h (10 m/s)的速度進行。最大負載重量為2kg。相對安全高度最小為25米,最大為500米。飛行時長(從起飛到降落)由無人機的電池容量決定,最長為40分鐘。在這段時間內,可以計算出22公里的航磁路線(根據進近和轉彎進行調整)。在一個工作日內,可以進行6-8次飛行,并進行120-160公里的勘測。磁場由由光泵的銣磁敏磁力計記錄。磁力計使用20米長的卡普綸繩索固定在無人機上(圖2)。

圖2 懸掛桿處的量子銣磁力計,由無人機用卡普綸繩索牽引
磁場采樣率為1000hz。單片GPS接收器與磁力計一起安裝在吊桿上。定位數據記錄速率10hz。GPS接收器天線固定在距磁力計傳感器約1米的桿上。原始的磁力計和定位數據記錄在可移動存儲器上。飛行結束后,所有數據都會被復制到筆記本電腦上,以檢查數據的完整性和質量。
將磁力計原始數據由二進制轉換為文本后,對原始數據進行統計處理,并將磁場數據導入數據庫進行進一步處理,采樣率為0.1 s,對應于航磁路徑上0.8-1 m的間距。磁力計和定位數據使用GPS時間對齊。
所有航空磁測量都有高質量地磁變化記錄的支持。地磁變化測量在三個地面MVS進行。其中兩個在固定位置,第三個站-移動的一個-位于無人機起飛/著陸點附近,并隨著區域的計算移動。
為評估飛行方向對磁力計讀數的影響而進行的測試表明,偏差修正不超過1.0 nT。
在使用無人駕駛飛機進行航空磁測之前,已從主管當局取得所有必要的授權,按照既定程序商定每天飛行高度超過50米。
測試工作結果
此項新技術在哈薩克斯坦東部和中部的Kazzinc LLP勘探地區進行了試驗。測試的主要任務是在實踐中查明該系統在進行航空磁測時在最低安全高度和最佳飛行速度下的能力,評估磁強測量誤差,并檢測需要更新和改進的技術特征。此外,還解決了純工業性質的任務:在找金-石英礦和層狀多金屬礦時,為地質填圖和預測估計建立詳細的高精度磁測數據。全面開展航磁實驗工作,測量路線1500多公里。建立了1:50 000和1:10000比例尺的探區磁場數字模型。對照測量,測量均方根誤差為±0.25-0.35 nT。
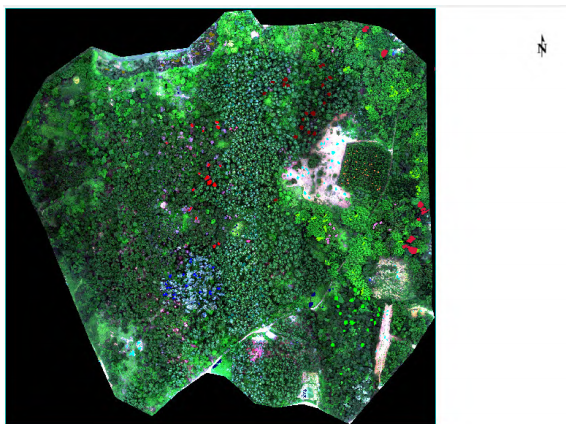
航空磁測區位于哈薩克斯坦東部,位于哈薩克斯坦阿爾泰西南山脊的南坡上。根據構造分類方案,本區位于西卡爾賓斯克構造帶的中部,根據成礦帶資料,本區屬于西卡爾賓斯克金礦帶。航磁測量是金-石英型礦石綜合找礦的一部分。航磁測區為復雜起伏地形(圖3),海拔685 ~ 1360 m。山坡上長滿了1-2米高的刺狀灌木,行走時很難穿越。沿著河床——生長著一片樹木高達10米的森林。航空磁測是在地表以上50米的磁力計傳感器高度進行的。為了評價多高程航空磁測在體積地質填圖方面的效率,除了在50米高度進行的主要調查外,還在離地面30和70米的磁力計高度測量了局部地區的磁場。要在給定高度飛行且地形跟隨,必須有足夠精確的數字地形模型(DTM)。將預制DTM加載到GCS中,用于設計航磁路徑的垂直剖面。

圖3 哈薩克斯坦東部地區,位于山脈的斜坡上,景觀條件復雜
目前,Aster Global DEM和SRTM DEM模型是最容易獲得的免費使用的數字地形數據。SRTM DEM數據與高分辨率無人機影像攝影測量處理得到的地形數字模型(S. Mikhailov, Kazzinc, 2016)對比分析表明,在山地條件下,SRTM數據與地表實際高度的差異在無灌木的淺坡地為±3-4米,在丘陵山地和有喬灌木植被的地區為±9-10米。
在初始階段的研究中,SRTM數據用于飛行計劃時,由于模型的重大錯誤,因此,低估真正的地形和森林覆蓋,磁力儀的吊艙系統被樹木切斷了導致磁力計掉落。幸運的是,磁力儀沒有損壞,也沒有失去工作能力。隨后的飛行使用高精度DTM (cell/pixel size為2 m,高度絕對誤差±0.2 m),使用無人機拍攝的高分辨率圖像的攝影測量處理數據構建。后來就沒有這樣的事故了。
圖4為測量路徑垂直剖面示例。
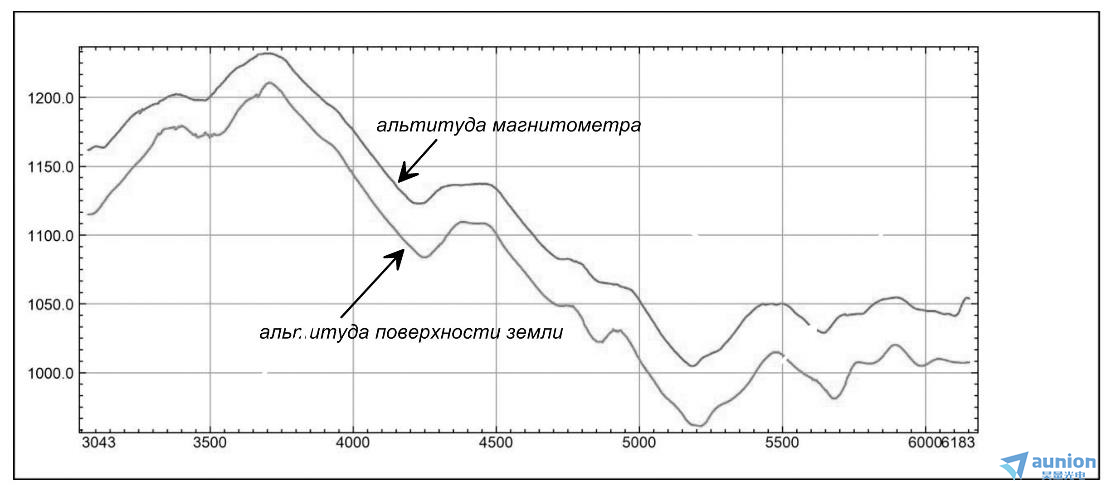
圖4 航空磁測時地形跟隨的磁力計高度與地球表面圖
航磁測量在航線之間50米的距離進行。為了平整航磁測量數據,對與直線垂直鋪設的一系列連接線路進行了測量,連接線路之間的距離為1 km。磁力計在測量路線上的平均速度為36 km/h (10 m/s)。磁場采樣率為1000hz,坐標采樣率為10hz。對磁力計原始數據進行統計處理后,將磁場記錄到結果數據庫中,時間增量為0.1 s,對應于航空地球物理路徑上0.8-1 m的距離。
航磁測量結果為異常磁場彩色圖像(圖6a)和異常磁場垂直梯度計算結果(圖6b)。場的垂直梯度降低了原場的低頻分量,增強了局部分量,強調了場內部結構的要素。為了比較沿多條航磁路線的航磁測量和地面測量,利用G-859光泵磁力計進行了地面地磁測量(圖7)。
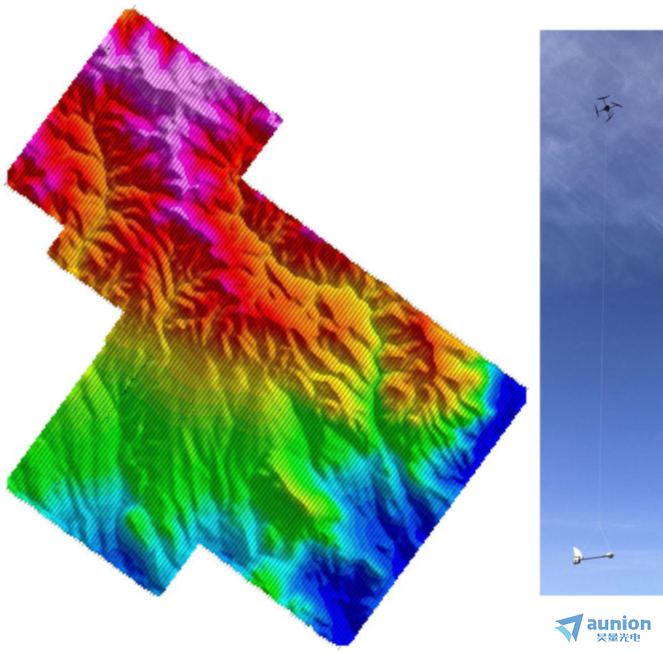
圖5 哈薩克斯坦東部地表起伏和航磁測量路線地形高程685 - 1360 m
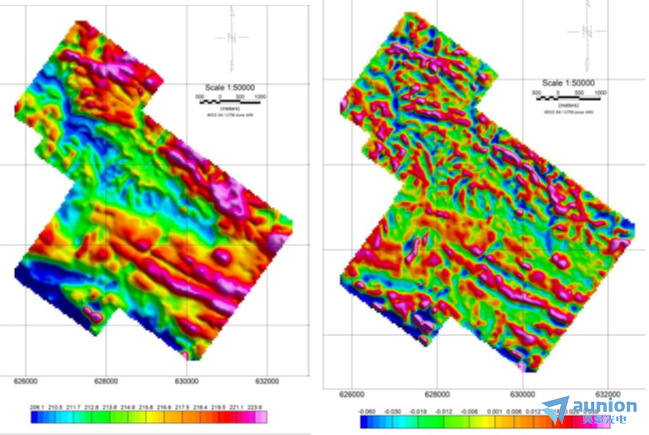
圖6 異常磁場(上)和磁場垂直梯度(下)

圖7 使用G-859磁力計進行徒步磁測
磁場為自動模式記錄儀,時間增量為4 s,操作者沿導線的平均速度為1.8 km/h,徒步移動時相鄰測點之間的距離為0.5 ~ 4 m,取決于灌木密度和坡角。陸地磁力計平均采樣間隔為2米。在同一導線上進行的航空和陸地測量的磁場圖見圖8。
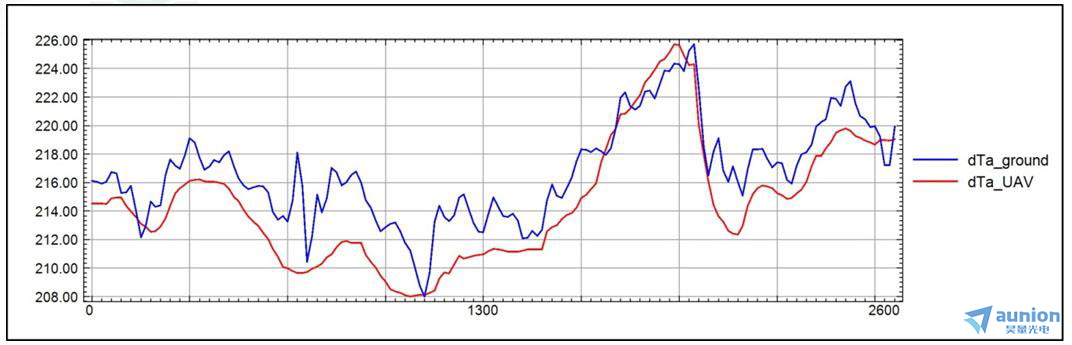
圖8 陸、航磁測量磁場圖對比
相對于無人機航磁測量數據而言,徒步運動時的磁場測量噪聲水平明顯較高。根據對照測量,陸地測量的均方根誤差為±2.3 nT,在地磁儀高度50 m處的航空磁測量的誤差為±0.25 nT。
哈薩克斯坦中部的試驗工作區域位于哈薩克斯坦共和國卡拉干達地區的Zhailminskaya下褶皺區。利用無人機進行航磁測量,用于地質填圖、隔離和追蹤有希望的層狀鉛鋅、鐵錳礦帶。該地區預測與上法門統有機質灰巖有關,被風成砂和古近系粘土覆蓋。在上世紀70年代的找礦過程中,通過探井對方鉛礦和閃鋅礦嵌布細脈的石灰巖進行了相交,深度為150 ~ 160 m。
研究區域地勢平坦,景觀條件為草原、半荒漠(圖9)。研究區域面積38平方公里,采用1:10000比例尺航磁測量。航磁線路總長度為465公里。地磁儀測量時高度為地表以上30米,線路間距為100米。根據控制測量,航磁測量的均方根誤差為±0.35 nT。

圖9 哈薩克斯坦中部地區自然景觀:風成沙、大草原、半沙漠
上世紀80年代在該區域進行了規模為1:25 000的綜合航空地球物理調查。該調查是在AN-2飛機上使用MMC-214光泵磁力計進行的,該磁力計具有模擬-數字磁場記錄。飛行高度為25-75米,航線間距離為250米,采用“泊斯克”無線電測地系統進行定位。定位誤差±13.7 m,磁場測量MSE±2.7 nT。
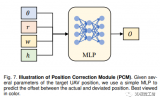
為了評估使用無人機進行的航磁測量的信息價值,將得到的地圖與以前進行的航磁測量的數據進行比較(圖10)。利用現代軟件Geosoft Oasis Montaj對歸檔的數字AMS數據進行再處理和可視化。為了便于比較,將磁場值降低到2017年的調查水平,同時使用相同的色標進行可視化。
新測得的磁測數據與以前高精度航磁測量的結果基本一致。因此,對比分析明確表明,使用無人機獲得的航磁數據具有更大的細節和空間分辨率。新的磁力測量幾乎比1988年進行的那次更精確。局部磁場分量(圖11)包含了以前無法獲得的有關該地區構造和構造剖面細節的新信息。隨后結合其他地質和地球物理資料對新的磁力測量材料進行深入分析,很可能會發現鉛鋅礦化的其他找礦標準,并采取更合理的方法來確定有希望的地帶進行進一步研究。
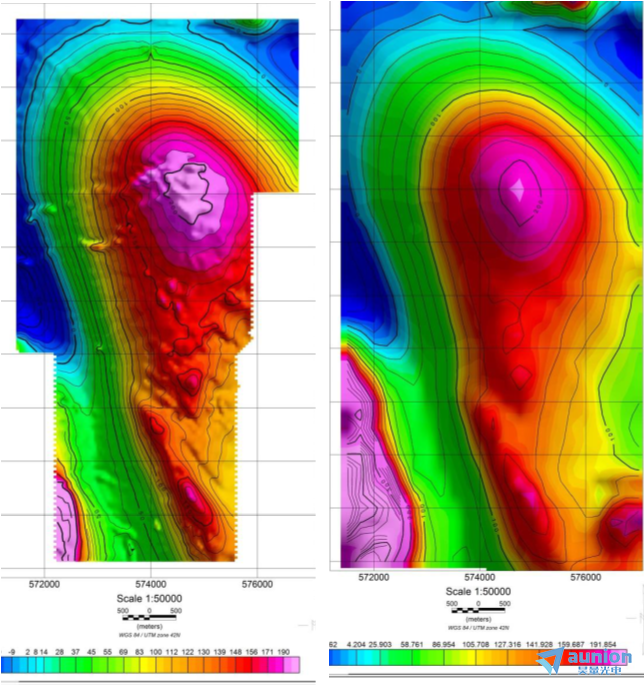
圖10 2017年左側磁場異常- 1:10000測量;對,1988年1:25000的調查
進行的測試工作可以得出以下結論:
1. 利用無人機和光泵磁力計進行航磁測量技術試驗,取得了良好的結果。以無人機和光泵磁力計為基礎,利用銣磁敏傳感器構建的航磁系統,將無人機的機動性與測磁設備的高靈敏度結合起來。該系統可以在極低的海拔、平坦的地形和困難的地形條件下進行詳細的地形測量。新技術的結果是,可以將測量的細節水平和性能提高10倍,從而顯著提高磁測量的精度。
2. 隨著該系統的引入,由于多次高程測量和垂直剖面處理,可以進行磁場的體積研究,這反過來又為磁測數據分析和解釋提供了使用新方法的可能性,這將導致構建可靠度達到新水平的體積地磁模型。
3. 進一步改進和引進低空航空磁測技術,將有可能為詳細地質填圖(比例尺1:10 000 - 1:10:從而提高地質圖的質量和可靠性,提高預測成礦分析和找礦生產力。
4. 當有人駕駛的飛機無利可圖,并且徒步測量需要更多的勞動力或由于地形條件惡劣而不可能時,使用該技術的最大效果預計是在中型地區(幾十平方公里,前數百平方公里)的勘探。未來幾年,利用無人機進行的低空航磁勘測很可能會被大量使用,在某些情況下幾乎完全取代陸地磁勘探,而磁測在地質勘探中的效率和實際重要性不不斷增加。
關于生產商Geoscan:
Geoscan集團是俄羅斯無人機(UAV)制造商,攝影測量數據處理和三維數據可視化軟件的開發商。公司旗下地球物理部門開發了基于無人機和光泵磁力計的航磁測量系統,目前全球已有超過50多個客戶使用。上海昊量光電作為Geoscan在中國大陸地區獨家代理商,為您提供專業的選型以及技術服務。對于Geoscan有興趣或者任何問題,都歡迎通過電話、電子郵件或者微信與我們聯系。
審核編輯:符乾江

























 工商網監
工商網監
評論