 電子發燒友App
電子發燒友App


汽車電子自動化推動了交通領域的下一次創新飛躍,其基本前提是:在汽車應用中,車輛必須能夠準確地感知周圍環境。
事實上,汽車不僅必須準確感知自身的距離、速度和方向,還必須準確感知可能穿過其路徑的任何物體的距離、速度和方向。雷達是收集這些數據的最佳方式,這些汽車系統必須成功地解讀數據才能做出生死攸關的決定。
雷達的工作原理
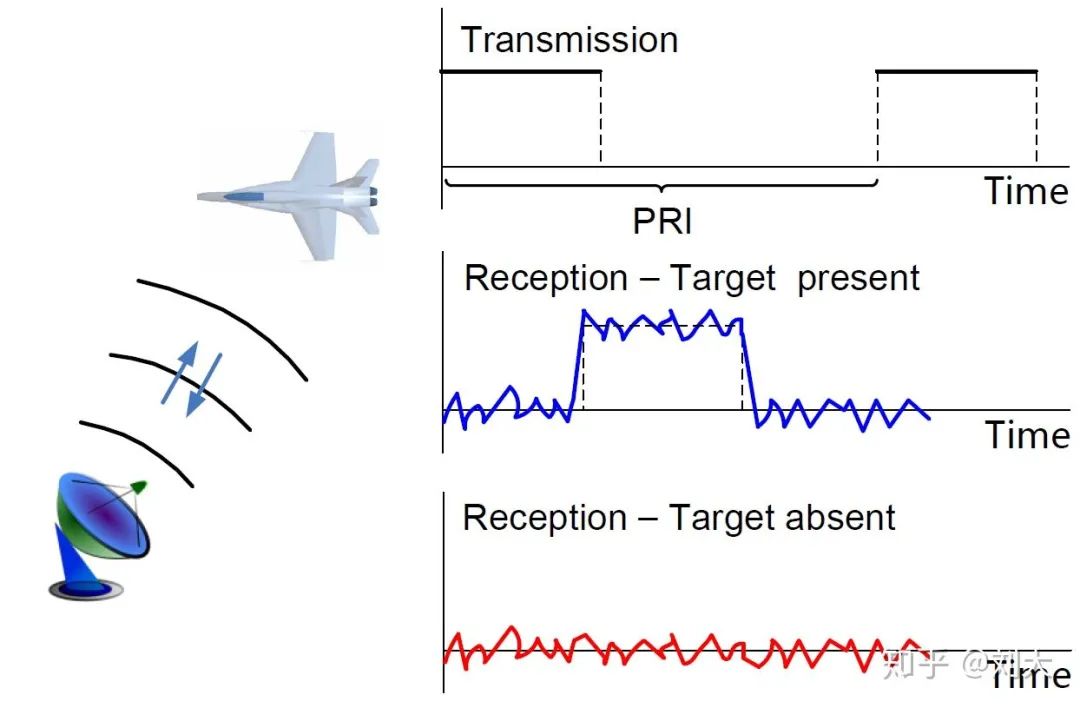
為了確定附近是否有可能影響汽車的物體,汽車系統必須確定物體的方向或到達角 (AoA)、速度和距離,以及檢測到的物體是真實的還是來自背景中的噪音或雜亂。圖 1 顯示了如何收集雷達數據。
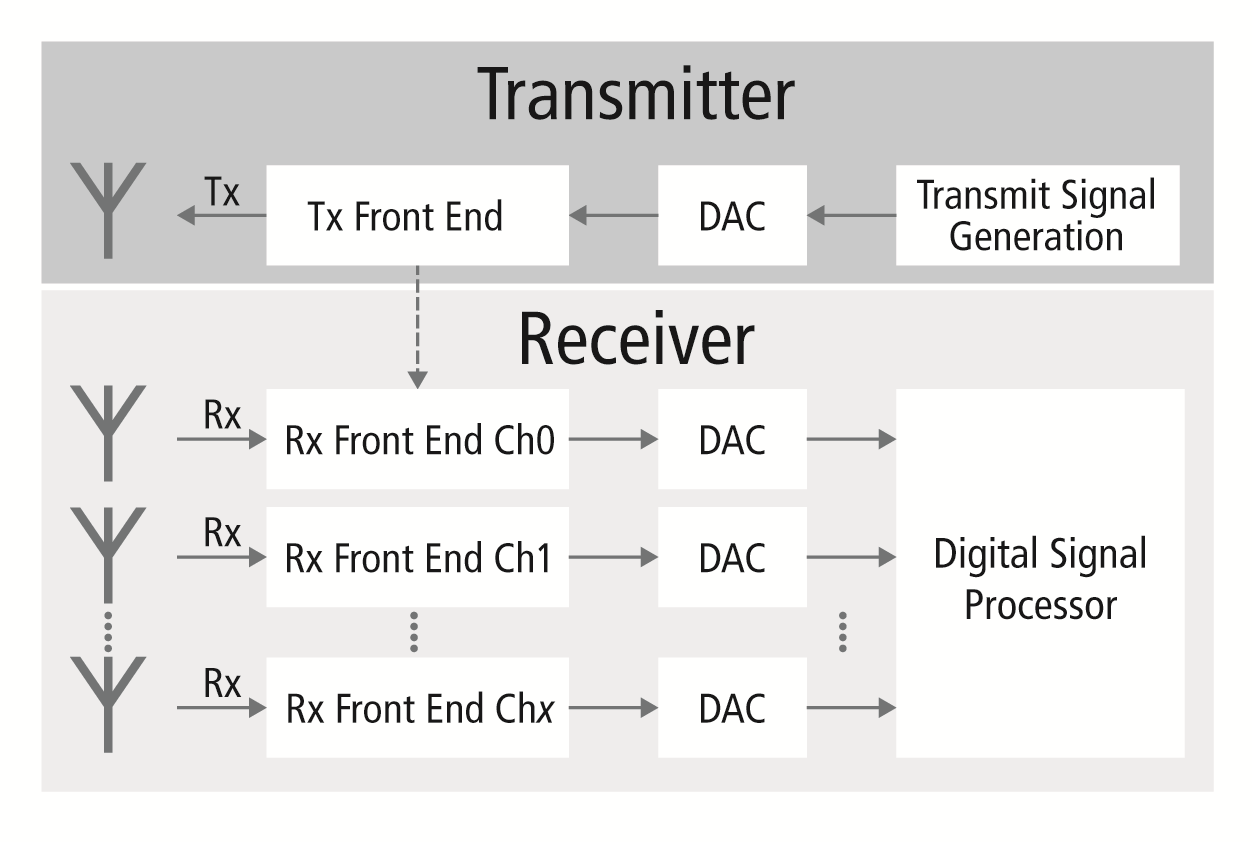
圖 1:雷達系統框圖。
這些信號從發射天線釋放到環境中。
信號“反彈”或反射回接收器 (RX),并通過模數轉換器 (ADC) 轉換回數字數據。
然后數據由數字信號處理器 (DSP) 處理,以根據該數據做出決策。
DSP:判斷是否停止
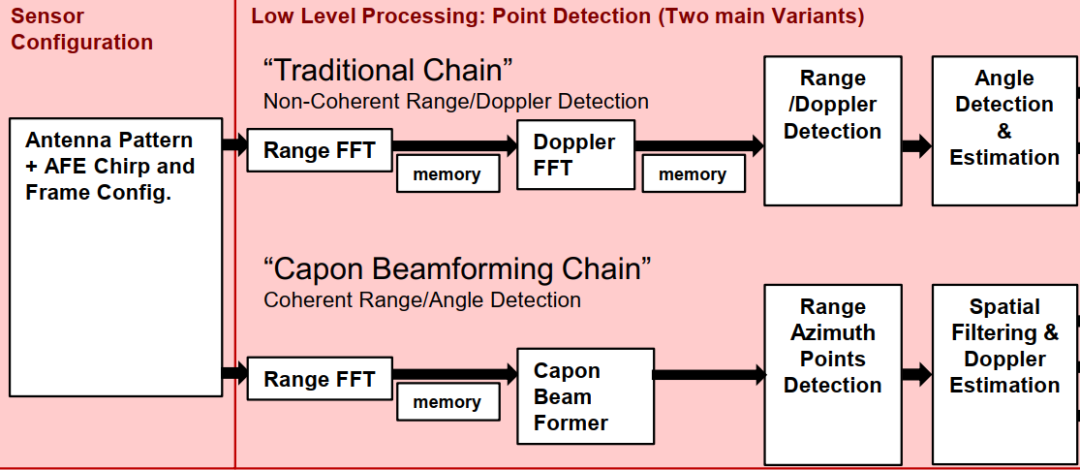
影響 DSP 執行決策過程的值包括三個主要因素,如圖2所示:
方向:在處理流程中,來自輸入數據立方體的樣本使用空間波束形成濾波器進行過濾,以創建數字波束,作為數字波束形成 (DBF) 模塊的一部分。
速度和距離:這些波束通過二維快速傅里葉變換 (FFT) 算法沿距離和多普勒軸進行進一步處理。
CFAR:恒定誤報率或 CFAR,作為“過濾器”來確定檢測到的對象是否可能是真實對象或背景“噪聲”的一部分。
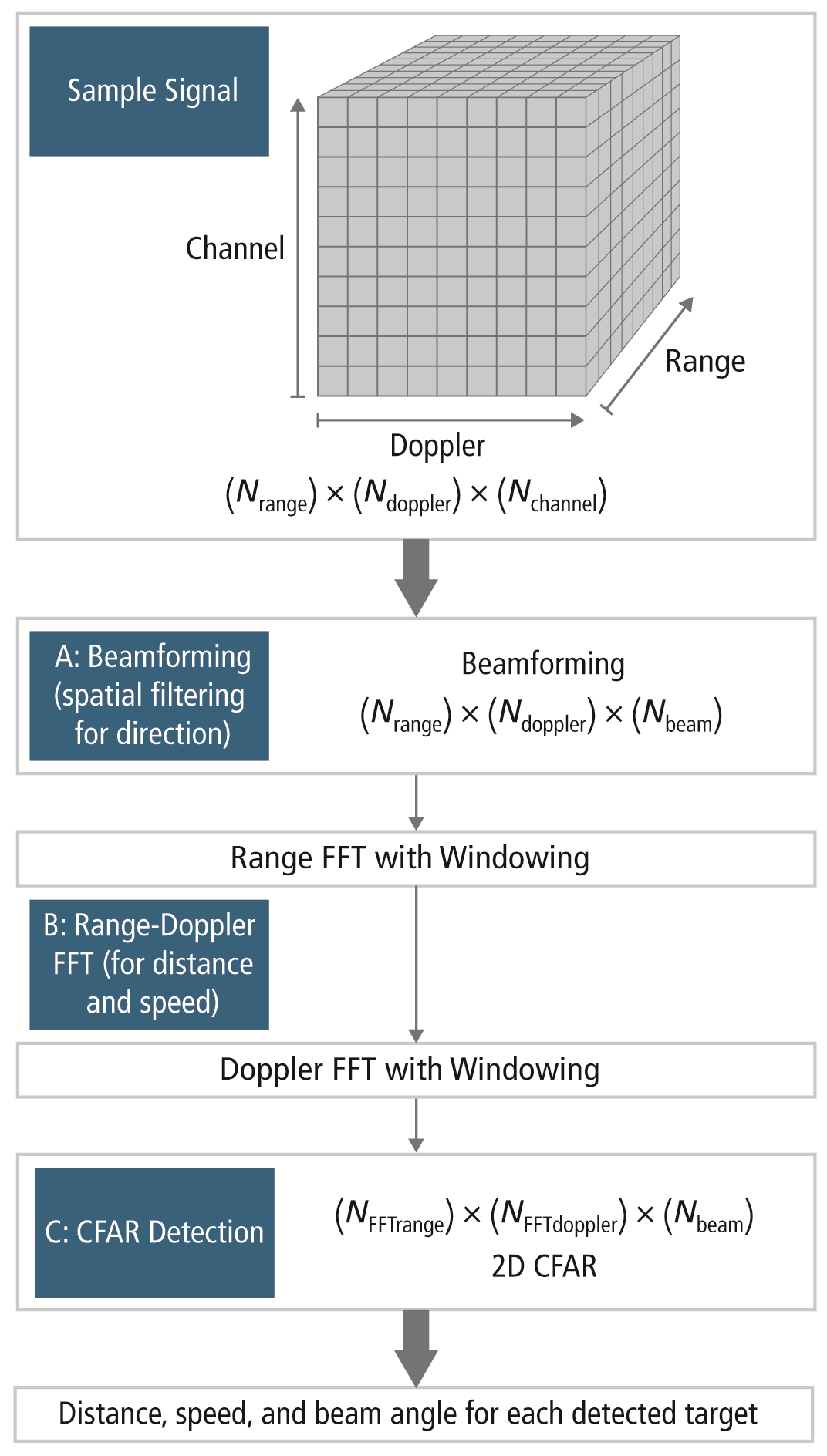
圖 2:DSP 框圖和流程。
為了實現高效,處理器必須同時執行數據處理和數據傳輸。軟件的結構應盡量減少數據傳輸,并且直接內存訪問 (DMA) 應用于與模塊計算同時執行數據傳輸。 ?
A. 定向波束成形
DBF 內核沿數據立方體中的通道維度執行有限脈沖響應 (FIR) 濾波。FIR 濾波器的長度等于天線單元的數量(在這種情況下為 8 個),并且預先選擇 FIR 抽頭以傳遞來自以特定預定空間方向為中心的波束的信號并抑制來自其他方向。
在實踐中,DBF 將數據立方體處理為輸入,并產生距離多普勒 2D 信號作為輸出光束。不同組的 FIR 抽頭可用于使用相同的數據立方體生成多個光束信號。在此示例中,使用單獨的 FIR 抽頭組沿不同方向生成五個光束。
B. 速度和距離的多普勒和距離 FFT
雷達使用距離多普勒維度的二維頻域頻譜進行處理。該頻譜是通過執行 2D FFT — 沿距離維度執行 1D FFT,然后沿多普勒維度執行 1D FFT — 并因此形成圖 2中所示的立方體而獲得的。
二維距離多普勒 FFT 內核用于將 DBF 內核產生的五個二維波束信號中的每一個轉換為二維頻域頻譜。加窗 2D FFT 用于分離信號,范圍 FFT 沿距離維度,然后是多普勒 FFT,沿多普勒維度。每個一維 FFT 還使用一個漢明窗。
范圍 FFT 計算為一維 FFT,而多普勒 FFT 執行為基于塊的 FFT,以避免轉置輸入和輸出。FFT 算法基于基于 Kronecker 乘積的形式化。在最后階段,多普勒 FFT 內核計算每個 bin 的逐點能量。
C. 用于目標檢測的 CFAR
CFAR 的作用是確定閾值,超過該閾值的任何回報都可以被認為可能來自目標。如果此閾值太低,則會檢測到更多目標,但會增加誤報數量。
相反,如果閾值過高,則檢測到的目標較少,但誤報的數量也較低。在大多數雷達探測器中,這個閾值是通過算法確定的,以計算誤報的概率——或者等效地,誤報率或誤報之間的時間。
CFAR 內核對頻域中的 2D 能量信號進行操作,通過將每個 CUT 與縮放估計值進行比較,將 2D FFT 能量信號中的每個 bin 或被測單元 (CUT) 分類為目標(正)或噪聲/雜波噪音和混亂。使用的比例因子和閾值由誤報概率或 CFAR 確定。
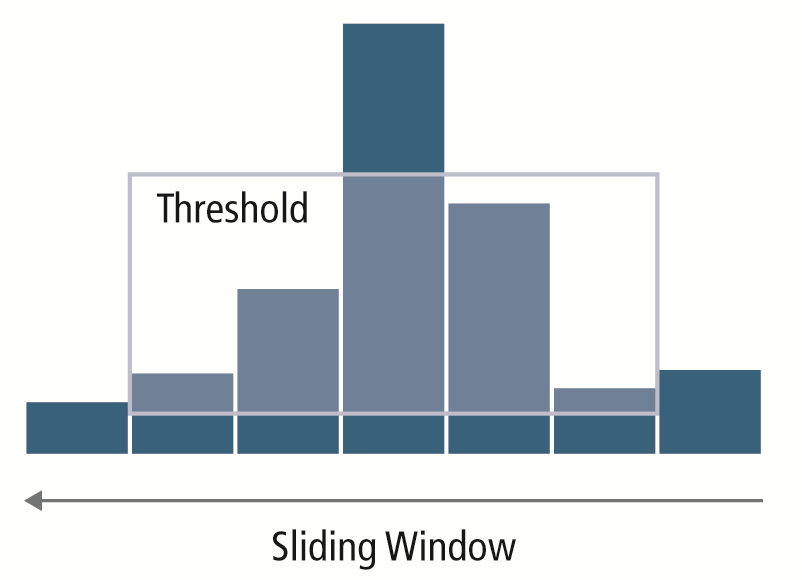
圖 3:顯示陽性結果和檢測超過閾值的 CFAR 圖。
在圖 3中,調制良好的 CFAR 是閾值,“正”是檢測超過閾值的地方。換句話說,為了確定目標,將 CUT 的值與 CFAR 進行比較——計算閾值以確定 CUT 周圍的本底噪聲水平。
CFAR 是通過檢查 CUT 周圍的一個單元塊來計算的(圖 4)。為了避免使用來自 CUT 本身的值破壞該估計,通常會忽略與 CUT 相鄰的單元或保護單元。如果目標的值大于其所有相鄰單元格(CFAR 或噪聲和雜波閾值),則聲明目標存在于 CUT 中。
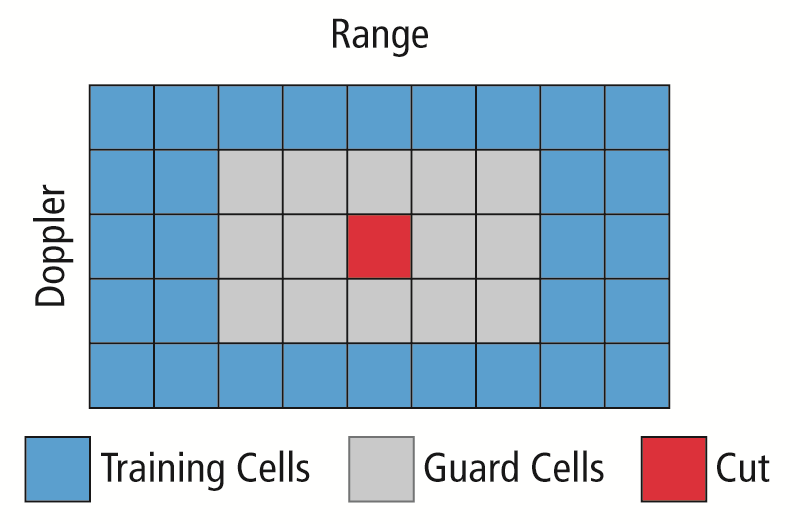
圖 4:CFAR 塊處理。
CFAR 內核的區別在于如何使用訓練單元形成噪聲估計。例如,單元平均恒定誤報率(CA-CFAR)噪聲估計是通過對訓練區域中的單元的值進行平均來形成的,而有序統計恒定誤報率(OS-CFAR)噪聲估計是由以降序對訓練區域的單元格值進行排序,并使用第 N個 排序值。
也可以使用 CA-CFAR 和 OS-CFAR 的組合。AND CFAR 組合對每個 CUT 的 CA-CFAR 和 OS-CFAR 的分類結果執行邏輯 AND,而 OR CFAR 組合執行邏輯 OR。
DSP:決策者
在計算出方向、速度、距離和 CFAR 后,DSP 將能夠確定孩子從操場扔到迎面而來的汽車的路徑中的球是否可能會在當前軌跡上攔截車輛,以及是否必須采取規避措施。換句話說,嵌入式系統將有助于使整個車輛對每個人都更安全。
審核編輯:湯梓紅





































 工商網監
工商網監
評論