 電子發燒友App
電子發燒友App


配套豐富、租金低廉,城中村和一些老小區成為很多人來到大城市的第一站。同時,人員聚集、建筑稠密、早期建筑資料缺失,這些區域的綜合治理,亟需對區域內路網、建筑及室內實際情況,進行準確測量與還原。
擁有基于三維空間的人地關系數據,城市疫情防控、綜合治理、城市更新及精細化管理等需求,都將擁有更為科學有效的抓手。
游刃有余,靈光 Lixel L1重建城中村
在深圳某城中村,XGRIDS其域創新在現場使用4臺靈光Lixel L1,對區域進行三維重建,并在一天內生成對應戶型圖,是傳統作業效率的十倍以上。
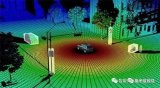
靈光Lixel L1采用自研實時三維實景重建技術,實現多傳感器微秒級時鐘同步,融合自研實時三維重建算法,在各種未知環境中,無需GNSS定位,便可輕松便捷地捕捉到準確全面的三維真彩點云數據。
 三維真彩點云直出
三維真彩點云直出 多源數據融合
多源數據融合同時,我們也使用了配套的LixelStudio一站式后處理軟件,可以在點云數據的基礎上進行多源數據融合重建,輸出空地一體的室內外模型,還可根據點云模型一鍵直出建筑戶型圖。
 一鍵直出戶型圖
一鍵直出戶型圖 BIM模型建模
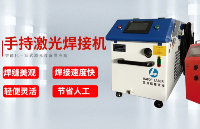
BIM模型建模基于Lixel L1的手持SLAM軟硬一體解決方案,其域創新可以在12小時內完成上千所住房的三維激光點云采集及戶型圖生成。
獲取的激光點云數據與戶型圖,可導入CAD、3DS Max、Revit等多平臺滿足不同使用需求,也可融合傾斜攝影、航空影像等數據,生成室內室外、空地一體的實景模型,讓城市管理與更新有據可循。
四大優勢,復雜區域采集重建更高效
1、全天候作業,外業效率大大提升
LixelGO App實時瀏覽重建效果,外業作業可現場確認結果;測量不受光線影響,環境適應性強,可靈活制定作業周期,是傳統作業效率的十余倍。
2、數據真實有效,輸出成果豐富
可快速獲得真彩點云和圖像數據,無需額外拍照記錄;不依賴人為觀測,數據真實有效,輸出成果豐富,數據高復用。
3、操作簡單易學,支持斷點續掃
操作簡單易學,單次作業長達1.5小時;支持斷點續掃,可實現室內外一體化掃描作業,大規模場景無需分段作業。
4、內業繪制簡便
內業點云處理時間短,自動化程度高,可自動生成平面戶型圖。
大有可為,三維重建新紀元
在城市更新、綜合治理與精細化管理過程中,各個城市都對信息化提出了明確要求,既要完整,也要及時:
《深圳市城中村(舊村)綜合整治總體規劃(2019-2025)》提出,“城中村綜合整治分區應建立地理信息數據庫并納入規劃‘一張圖’系統進行管理”;
《上海市城市管理精細化“十四五”規劃》提出,加快數字孿生城市建設。圍繞治理要素“一張圖”,加快城市空間、城市部件、城市運行動態的數字化;
《廣州市城市更新辦法》則要求城市更新主管部門加強城市更新基礎數據庫和動態監控信息系統建設,實行更新改造全程動態監管。
靈光Lixel L1為城中村綜合治理、老舊小區改造等城市課題提供了全新的數字化采集建模手段,助力解決老舊建筑信息不全、測量精準度低、改造進展緩慢、效果難以量化等問題。
只需單人手持,靈光Lixel L1即可完成作業,連續自動、快速捕獲建筑物的高精度點云數據,采集即重建,極大地提高了測量重建效率。
靈光Lixel L1也可廣泛應用于現代樓盤、城鎮房屋、農村地籍、古建筑保護等廣泛領域,為各行各業提供精準可靠的三維數據。
*手持SLAM、移動激光掃描系統主要由激光掃描儀、慣性導航系統及相機組成,用于測量點的三維坐標和激光反射強度,相機用于測量點的三維坐標和顏色信息。根據移動激光掃描系統和數碼相機采集的數據可以得到點云數據,包括三維坐標、激光反射強度、顏色信息。
Simultaneous Localization And Mapping,簡稱SLAM,通過對各種傳感器數據進行采集和計算,生成對其自身位置姿態的定位和場景地圖信息的系統。目前SLAM主要的兩種形式是:基于激光雷達的SLAM(激光SLAM)和基于視覺的SLAM(Visual SLAM或VSLAM)。
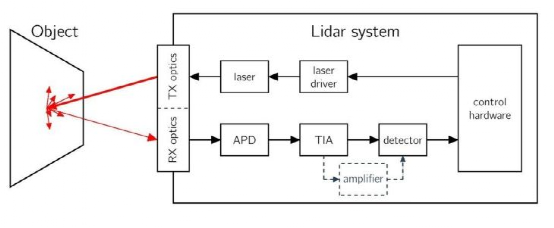
手持激光雷達、手持SLAM設備的工作原理與雷達非常相近,以激光作為信號源,由激光器發射出的脈沖激光,打到周圍障礙物上,引起散射,一部分光波會反射到激光雷達的接收器上,根據激光測距原理計算,就得到從激光雷達到目標點的距離,脈沖激光不斷地掃描目標物,就可以得到目標物上全部目標點的數據,用此數據進行成像處理后,就可得到精確的三維立體圖像。激光雷達采集到的物體信息呈現出一系列分散的、具有準確角度和距離信息的點,被稱為點云。通常,激光SLAM系統通過對不同時刻兩片點云的匹配與比對,計算激光雷達相對運動的距離和姿態的改變,也就完成了自身的定位。激光雷達距離測量比較準確,誤差模型簡單,在強光直射以外的環境中運行穩定,點云的處理也比較容易。同時,點云信息本身包含直接的幾何關系,使測量和計算變得直觀簡單。
審核編輯?黃昊宇

















































 工商網監
工商網監
評論