 電子發燒友App
電子發燒友App


2020年,為了讓更多人學習機械臂知識,我們推出了世界上最小的6軸機器人手臂:myCobot,之后陸續推出碼垛機械臂mypalletizer,小六軸mechArm,雙臂myBuddy。將昂貴的工業機械臂轉化成桌面級機械臂,通過較低的價格,搭建了一個機器人研究和教育平臺,降低了AI人工智能領域的學習門檻。
為了滿足更多用戶的需求,我們不斷擴大桌面級機械臂產品線,推出功能更強大、操作更便捷的高精度桌面機械臂奧創ultraArm,并搭配完善寫字畫畫、激光雕刻與視覺識別相關套裝,用戶可直接選用。
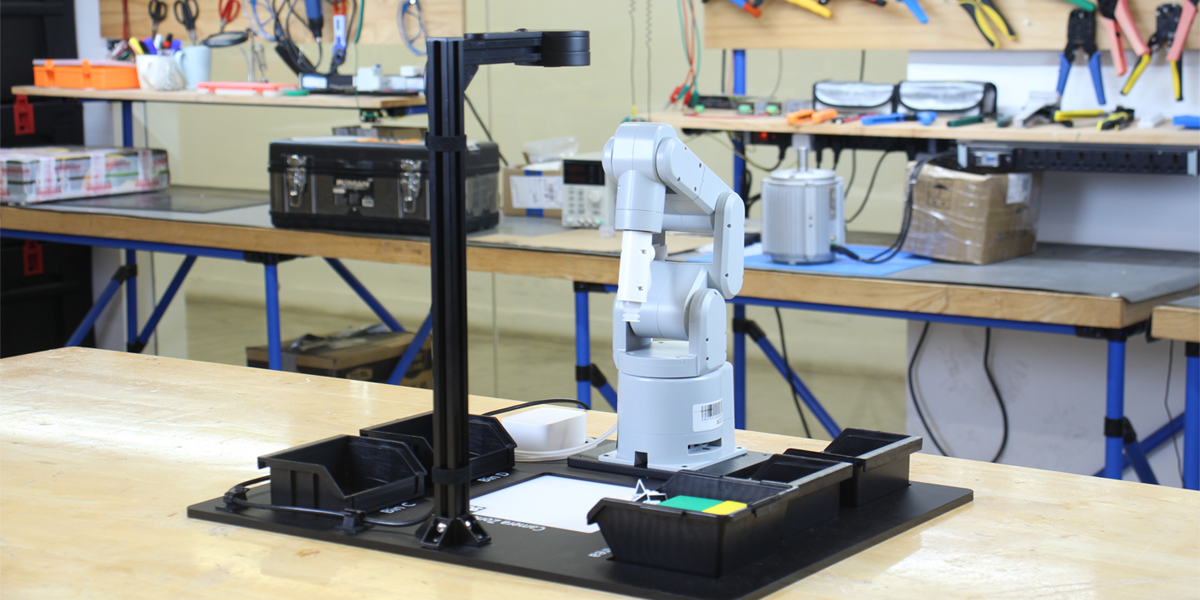
ultraArm奧創機械臂是一款超小型桌面機械臂,全身采用經典金屬結構設計,本體占用面積只有A4紙張的一半,靈活使用。搭載高性能步進電機,能夠實現±0.1mm重復定位精度和高穩定性。可進行寫字畫畫,激光雕刻,可自由搭配滑軌、傳送帶、智能小車、視覺相機等配件,根據不同需求完成不同實訓項目,廣泛應用到高等教育科研教學、職業應用教育等多個領域。
產品特點
01? 經典結構設計
金屬光澤配合工業風格硬朗的外觀,340mm的運動半徑,650g的有效負載,協助實現您的理想控制場景。
02?體積小巧
ultraArm奧創機械臂占用極少的空間,比一張A4紙還要小,隨手擺放,能夠更輕松地融入各種生產環境當中,具有靈活部署、快速響應的特點。
03?高精度
采用自主研發的高精度步進電機,能夠實現±0.1mm的重復定位精度。
04? 快速更換末端工具
搭配快換接口,適配多種末端執行器,只需簡單安裝即可更換工具,大大提高效率。
05?長時間工作
滿足7 X 24小時長時間工作,讓長時間的科創研究不在受限。
06?操作簡單
快速便捷的硬件電氣接口,一體化的設計,操作簡單,激光雕刻接口、自適應夾爪接口吸泵接口、燒錄開關輕松切換。人手一機,讓每位學生通過實操練習獲得更好的學習體驗
07?圖形化編程
MyBlockly 是一款積木式拖拽編程可視化軟件,“拖拽”編程是一種基本的技術,它允許通過拖拽代碼構建塊或者其他視覺線索,而不是手動編寫基于文本的代碼。如此一來,復雜又抽象的編程語言就變得容易理解
08?主流編程語言
采用全球主流機器人通訊框架ROS開發,并且支持仿真,在虛擬環境中進行控制及算法的驗證,降低了對實驗環境的要求提高了實驗效率
產品套裝
ultraArm作為桌面級多功能開源機械臂實訓平臺,為滿足開展機器人技術項目教學實踐而設計,實踐內容涉及機器人機構學、機器人運動控制技術、傳感器及檢測技術、機器視覺、機器人建模與仿真、機器人操作系統等課程內容,可用于機器人專業、機電相關專業、智能制造專業、自動化專業、電子信息專業等根據課程需要開展專業課程實訓、專業拓展實訓。
ultraArm有5種套裝可選擇,有寫字畫畫套裝、激光雕刻套裝、視覺抓取套裝、滑軌識別套裝、傳送帶識別套裝。
提供機器人場景及功能應用、機器人算法的應用實例及源碼,可自主興趣DIY和學習視覺識別相關知識。
01?興趣DIY
一鍵軌跡生成可視化軟件,配有工作平臺,筆夾,激光雕刻,溫馨時刻在線制作。DIY制作銘牌,手機殼,AI畫圖,跟隨時尚潮流熱點,享受創作快感。
套裝一:寫字畫畫套裝
?
機械臂以其高精度和穩定性,可以書寫出流暢的線條。自研Elephant luban 軟件可以自定義圖形大小、落筆位置,也提供了讓用戶將圖片轉換功能,快速將圖片生成運行軌跡,給用戶更大的創意空間。
套裝二:激光雕刻套裝
?
想要擁有專屬于自己的標志,還可以進行激光雕刻,獨家定制你自己想要的圖案和標志。
02?機器視覺
提供開源的AI算法,配套相關的教學應用場景,視覺抓取,滑軌,傳送帶套裝, 靜態視覺,動態視覺的一站式體驗快速上手。
套裝三:視覺抓取套裝
?
應用深度學習算法,用戶可以利用機械臂完成定位抓取和自動分揀。
套裝四:傳送帶套裝
?
通過距離傳感器感應物流距離實現抓取;通過傳送帶傳輸物流進行視覺識別分類。
套裝五:滑軌套裝
?
通過視覺識別物品,追蹤跟隨物品移動并抓取。
使用Python編程,配合跨平臺的計算機視覺庫OpenCV,具備目標檢測、圖像分類和智能分析等Al能力,支持深度學習和自主訓練。
機器視覺
顏色識別抓取
?
配合高清攝像頭,ultraArm奧創機械臂可以通過AI視覺算法,對特定顏色的物體進行智能分揀。
圖像處理采用基于LAB顏色空間的色彩閾值二值化,通過腐蝕、膨脹等操作,實現對物體顏色的提取和識別,然后根據顏色自動分揀至對應位置。
圖像識別抓取
?
使用eye-to-hand的模式,使用攝像頭,通過 OpenCV 加載Tensorflow 訓練出來的模型數據,識別圖像物塊并定位圖像物塊位置。通過相關點位,計算出物塊相對于機械臂的空間坐標位置,為機械臂設置一套相關動作,將識別的物塊放入桶中。
形狀識別抓取
?
物體的形狀識別是模式識別的重要方向,在計算機中物體的形狀有多種表示方式,基于不同的形狀表示方式,提出了多種形狀識別方法,如基于傅里葉描述子、主分量分析、不變性距等方法。在形狀識別中,識別所基于的模式特征非常重要。
通過預處理:圖像的灰度變化:灰度級修正、灰度變換、直方圖修正,圖像平滑:鄰域平均法、中值濾波。形狀提取(分割):基于邊緣檢測的方法、基于閾值選取的方法、基于區域生成的方法。提取后處理:形狀特征提取。
二維碼識別抓取
?
在特征提取模塊中,我們使用紋理特征提取算法從原始輸入圖像中提取出多分辨率直方圖特征、局部二值模式特征和邊緣方向直方圖特征,這三種紋理特征的表達形式均為一維數組。我們將這 3 個數組連接為 1 個一維數組,作為后續分類模塊的輸入。
在特征分類時,我們希望保留所有屬于二維條形碼的圖像子塊,同時去除所有屬于背景的圖像子塊。在該模塊中,我們使用了自適應Spatialboost算法。
特征點識別抓取
?
FAST角點檢測,通過考察像素點與周圍領域內的16個像素點的差異來確定特征點,并且通過分割測試算法對檢測效率做了極大的提升。
yolo識別抓取
?
傳統的目標檢測系統利用分類器來執行檢測。為了檢測對象,這些系統在測試圖片的不同位置不同尺寸大小采用分類器對其進行評估。如目標檢測系統采用deformable parts models (DPM)方法,通過滑動框方法提出目標區域,然后采用分類器來實現識別。近期的R-CNN類方法采用region proposal methods,首先生成潛在的bounding boxes,然后采用分類器識別這些bounding boxes區域。最后通過post-processing來去除重復bounding boxes來進行優化。這類方法流程復雜,存在速度慢和訓練困難的問題。
我們將目標檢測問題轉換為直接從圖像中提取bounding boxes和類別概率的單個回歸問題,只需一眼(you only look once,YOLO)即可檢測目標類別和位置。
應用場景
教育科研
?
運用世界知名廣泛使用的ROS,皆可進行二次開發,提供充足的教育資料,幫助您進行機器人和編程知識的學習,并滿足您的開發需求,給高校、高職、研究所等教學及研究工作帶來極大的便利。
創客&硬件愛好者
ultraArm奧創機械臂作為功能完善的消費級產品,具備高度可玩性,適合廣大創客和硬件愛好者。其豐富的擴展空間和簡易的開發環境,能方便有能力的玩家進行硬件DIY和二次開發。
商業應用
?
ultraArm奧創機械臂具有高精度和高穩定性的特點,控制簡單、高度可拓展、容易開發等特性,讓它能針對多種應用場景進行快速部署,是高性價比的輕量級工業解決方案。
審核編輯?黃昊宇






























 工商網監
工商網監
評論