如題,最近在做CAN相關(guān)的項(xiàng)目,但是偶發(fā)出現(xiàn)CAN錯(cuò)誤狀態(tài)寄存器 (CAN_ESR) 中LEC[2:0]為100: 隱性位錯(cuò),想問(wèn)下熟悉的朋友,這個(gè)是哪方面的問(wèn)題,硬件上波形質(zhì)量挺好
2024-03-18 06:08:00
隨著CAN總線在電動(dòng)汽車、充電樁、電力電子、軌道交通等電磁環(huán)境比較惡劣的場(chǎng)合應(yīng)用越來(lái)越多,信號(hào)干擾的問(wèn)題已經(jīng)嚴(yán)重影響到使用者對(duì)CAN總線的信任。究竟如何才能抗干擾?本文展示了致遠(yuǎn)電子CAN總線抗干擾
2024-03-05 08:24:55 139
139 
這意味著變送器通過(guò)CAN收發(fā)器改變總線電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線。接收器通過(guò)監(jiān)測(cè)總線電平將總線上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54600 
CAN總線的隔離地與屏蔽雙絞線的屏蔽層怎么接 CAN總線的隔離地與屏蔽雙絞線的屏蔽層的接法是一個(gè)非常關(guān)鍵的問(wèn)題,它直接涉及到總線的可靠性、抗干擾能力以及信號(hào)質(zhì)量的保持。 首先,需要明確的是CAN總線
2024-02-06 10:15:021391 can總線與485總線五大區(qū)別? CAN總線和485總線是現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中常見(jiàn)的兩種通信總線,它們都具有一定的優(yōu)勢(shì)和特點(diǎn)。 一、傳輸距離 CAN總線和485總線在傳輸距離上有著明顯的差異。CAN
2024-02-03 09:22:391563 找到CAN總線(故障)節(jié)點(diǎn)的三種辦法? CAN總線是現(xiàn)代汽車電子系統(tǒng)中常見(jiàn)的通信協(xié)議,用于車載電子設(shè)備之間的數(shù)據(jù)傳輸。在汽車的CAN總線系統(tǒng)中,每個(gè)節(jié)點(diǎn)都扮演著重要的角色。然而,由于各種原因,有時(shí)候
2024-02-02 10:35:10456 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見(jiàn)的CAN總線類型。它們?cè)跀?shù)據(jù)傳輸速率、最大電纜長(zhǎng)度、適用場(chǎng)景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:01496 請(qǐng)問(wèn)用CAN存儲(chǔ)器存儲(chǔ)的CAN總線數(shù)據(jù)幀格式有哪些呢? CAN總線是一種常用于汽車、工業(yè)控制和其他應(yīng)用領(lǐng)域的串行通信協(xié)議。在CAN總線中,數(shù)據(jù)通過(guò)數(shù)據(jù)幀的形式進(jìn)行傳輸。數(shù)據(jù)幀包含了發(fā)送節(jié)點(diǎn)和接收節(jié)點(diǎn)
2024-01-31 13:46:38307 解一下CAN總線的基本原理。CAN總線采用了差分信號(hào)傳輸方式,通過(guò)兩根線分別傳輸CAN_H和CAN_L信號(hào),用于表示數(shù)據(jù)位的高電平和低電平。這種差分信號(hào)傳輸方式具有較好的抗干擾性能,可以有效地傳輸數(shù)據(jù)。 在CAN總線中,數(shù)據(jù)幀是用于傳輸數(shù)據(jù)的基本單元。一
2024-01-31 11:31:52305 了 ACK,固件升級(jí)過(guò)程開(kāi)始了,但隨后由于 I2C 總線繁忙,中途失敗 \" \"
我還連接了一個(gè)示波器來(lái)查看 I2C 總線上的信號(hào);邊緣和時(shí)序看起來(lái)還不錯(cuò)。 在此固件升級(jí)過(guò)程中,STM 芯片(在 ROM 引導(dǎo)加載程序中)似乎鎖定或無(wú)法發(fā)送 ACK 可能的原因是什么?
2024-01-30 06:55:41
CAN總線的應(yīng)用范圍廣,應(yīng)用環(huán)境相當(dāng)復(fù)雜,一些靜電、浪涌等干擾很容易耦合到總線上,并直接作用于CAN總線接口。為了滿足一些高等級(jí)EMC的要求,有必要添加額外的外圍保護(hù)電路。CAN接口保護(hù)方案CAN
2024-01-13 08:27:22157 
CAN總線共模電感是應(yīng)用于CAN總線通信中的一種電子元件,用于解決CAN總線通信中的共模干擾問(wèn)題。本文將詳細(xì)介紹CAN總線共模電感的定義、作用、選型要點(diǎn)以及常見(jiàn)注意事項(xiàng),并且結(jié)合實(shí)際案例進(jìn)行分析
2024-01-05 13:42:34744 還是寫(xiě),最后一位本應(yīng)由LTC2471將SDA拉低的電平一直為高電平,即無(wú)ACK應(yīng)答。請(qǐng)問(wèn)有可能是什么地方出了問(wèn)題?
2024-01-05 11:44:37
我們根據(jù)can總線具有的一些特性可知:CAN總線肯定具有分層結(jié)構(gòu),而且參考OSI模型(OSI參考模型介紹)是肯定的,我們可以看一下相關(guān)的文檔可知:CAN遵從OSI模型。
2024-01-05 09:40:16317 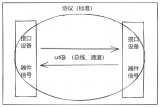
CAN總線星型連接器及特點(diǎn)? CAN總線星型連接器是一種用于連接CAN總線網(wǎng)絡(luò)的設(shè)備,它具有一些獨(dú)特的特點(diǎn)和優(yōu)勢(shì)。本文將詳細(xì)介紹CAN總線星型連接器的工作原理、結(jié)構(gòu)特點(diǎn)、適用范圍以及與其他類型連接器
2024-01-04 16:59:25804 的檢測(cè),因?yàn)椤皝G失的”ACK將導(dǎo)致出現(xiàn)此錯(cuò)誤幀。我們無(wú)法通過(guò)ADM3053觸發(fā)數(shù)據(jù)流中的丟失位,但根據(jù)我的觀點(diǎn),如果ACK位丟失,所有其他位也可能丟失。丟失意味著邏輯低電平(必須是CAN總線上的主動(dòng)
2024-01-03 09:00:17
CAN總線通訊協(xié)議由德國(guó)博世于上世紀(jì)80年代發(fā)明,第一個(gè)使用CAN總線通訊協(xié)議的量產(chǎn)車型是1991年的奔馳S級(jí)轎車,至今CAN總線依舊是車內(nèi)主要的通訊總線。隨著汽車電子智能化加速,CAN總線也開(kāi)始
2023-12-21 14:03:45658 
,第三個(gè)01000101
圖2是第一數(shù)據(jù)輸入之后的波形,ACK應(yīng)答位之后正常。
圖3是第二個(gè)數(shù)據(jù)和第三個(gè)數(shù)據(jù)輸入之后,ACK應(yīng)答之后的波形,數(shù)據(jù)線(黃色)出現(xiàn)一個(gè)不正常高電平
2023-12-20 08:24:36
,AD9984的ACK位永遠(yuǎn)是高電平,也就是,永遠(yuǎn)不回復(fù),,,這讓我很郁悶,,我的I2C程序在其他設(shè)備上可以正確運(yùn)行,比如MT9P001的攝像頭之類的,,這說(shuō)明我的I2C程序沒(méi)問(wèn)題。
唉,,我真的檢查不出來(lái)是哪兒的問(wèn)題了,,,煩請(qǐng)各位大俠指點(diǎn),感激不盡!!
2023-12-20 08:01:16
的電子控制系統(tǒng)被開(kāi)發(fā)了出來(lái)。CAN總線是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN網(wǎng)絡(luò)的消息是廣播式的,即在同一時(shí)刻網(wǎng)絡(luò)上所有節(jié)點(diǎn)偵測(cè)的數(shù)據(jù)是一致的,它是一種基于消息廣播
2023-12-08 15:51:13236 
、高速性和優(yōu)秀的網(wǎng)絡(luò)管理能力。 在CAN總線中,數(shù)據(jù)通過(guò)兩根線進(jìn)行傳輸,即CAN-H線和CAN-L線。CAN-H線為高電平,CAN-L線為低電平。這兩根線同時(shí)傳輸數(shù)據(jù),其中高優(yōu)先級(jí)的消息可以覆蓋低優(yōu)先級(jí)的消息。這種雙線傳輸?shù)臋C(jī)制使得CAN總線能夠同時(shí)傳輸多個(gè)
2023-12-07 18:09:401211 CAN總線為什么有兩個(gè)終端電阻,作用是什么? CAN總線是一種常用的串行通信協(xié)議,廣泛應(yīng)用于汽車、工控、航空等領(lǐng)域。在CAN總線中,存在兩個(gè)終端電阻,即CAN總線的兩端各有一個(gè)120歐姆的電阻
2023-12-07 11:15:351455 FPGA將sda拉高。我的理解是此時(shí)ADT7410會(huì)使sda從高變?yōu)榈妥鳛?b class="flag-6" style="color: red">ack位,但波形中并沒(méi)有ack位。
另外,下個(gè)圖作為參考,從ccs=10開(kāi)始,希望寫(xiě)入配置寄存器的地址0x03
2023-12-07 06:49:01
電壓分別3.5V和1.5V,即壓差為2V,經(jīng)過(guò)收發(fā)器轉(zhuǎn)換,MCU則可通過(guò)CAN_Rx讀取到信號(hào)0。
通信的整個(gè)過(guò)程
空閑狀態(tài)
在CAN協(xié)議中,當(dāng)總線上的上出現(xiàn)連續(xù)的11位隱性電平(兩根線電壓差小于0.5V
2023-12-05 10:45:42
電壓分別3.5V和1.5V,即壓差為2V,經(jīng)過(guò)收發(fā)器轉(zhuǎn)換,MCU則可通過(guò)CAN_Rx讀取到信號(hào)0。
通信的整個(gè)過(guò)程
空閑狀態(tài)
在CAN協(xié)議中,當(dāng)總線上的上出現(xiàn)連續(xù)的11位隱性電平(兩根線電壓差小于0.5V
2023-12-04 14:47:44
差分傳輸,為了避免信號(hào)的反射和干擾,還需要在CAN_H和CAN_L之間接上120歐姆的終端電阻。 每一個(gè)設(shè)備既可做主設(shè)備也可做從設(shè)備。CAN總線的通信距離可達(dá)10千米(速率低于5Kbps),速度可達(dá)1Mbps(通信距離小于40M)。 CAN電平邏輯 CAN總線采用”線與”的規(guī)則進(jìn)行總線沖裁,
2023-11-09 18:11:50654 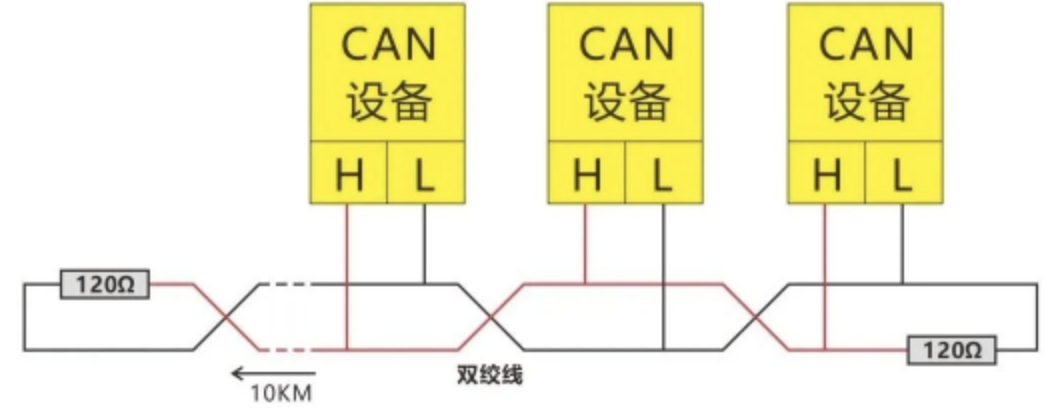
CAN總線技術(shù)已在汽車上廣泛應(yīng)用,隨著新能源車型以及自動(dòng)駕駛技術(shù)的推廣,總線問(wèn)題也對(duì)汽車的安全帶來(lái)風(fēng)險(xiǎn)挑戰(zhàn),本文從系統(tǒng)角度對(duì)CAN總線的電氣、EMC、硬件以及軟件等相關(guān)設(shè)計(jì)進(jìn)行梳理,結(jié)合現(xiàn)有總線系統(tǒng)設(shè)計(jì)經(jīng)驗(yàn)進(jìn)行分析與總結(jié)。
2023-11-03 10:17:21611 
CAN(Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來(lái)傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議用于汽車中各種不同元件之間的通信,以此取代昂貴而笨重的配電線束。
2023-11-01 16:39:54512 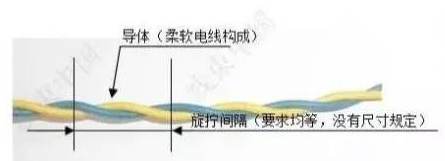
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-10-31 18:30:00437 
CAN控制器根據(jù)兩根線上的電位差來(lái)判斷總線電平。總線電平分為顯性電平和隱性電平,二者必居其一。發(fā)送方通過(guò)使總線電平發(fā)生變化,將消息發(fā)送給接收方。 顯性電平對(duì)應(yīng)邏輯 0,CAN_H 和 CAN
2023-10-27 14:55:281000 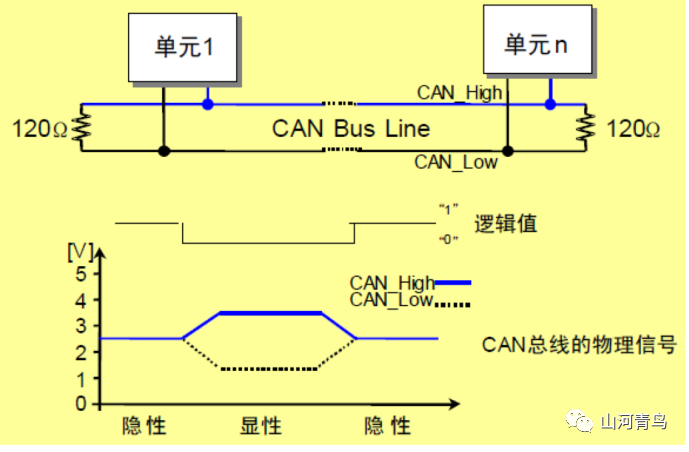
CAN總線舵機(jī)的特性、控制方法以及常見(jiàn)故障
2023-10-21 09:53:05 0
0 電子發(fā)燒友網(wǎng)站提供《基于CAN總線的智能節(jié)點(diǎn)設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-20 14:44:320 本資料是面向CAN總線初學(xué)者的CAN入門(mén)書(shū)。對(duì)CAN是什么、CAN的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、CAN的概要及CAN的協(xié)議進(jìn)行了說(shuō)明。
2023-10-16 15:29:113 在CAN總線應(yīng)用中,合理的CAN總線負(fù)載率是非常重要的,因?yàn)樵谪?fù)載率過(guò)高的情況下,系統(tǒng)性能可能會(huì)下降,增加錯(cuò)誤率并導(dǎo)致總線沖突。理想的情況下,CAN總線的負(fù)載率應(yīng)低于總線容量的80%。
2023-10-12 17:58:05581 怎么用示波器看can總線信號(hào)?? CAN總線是一種高速、可靠的控制器局域網(wǎng)絡(luò),常被用于汽車、航空等領(lǐng)域。在調(diào)試和故障排查時(shí),我們可以使用示波器來(lái)監(jiān)測(cè)CAN總線的信號(hào)。以下是如何使用示波器來(lái)看CAN
2023-10-11 17:19:303250 CAN總線的應(yīng)用在現(xiàn)在看來(lái)越來(lái)越廣泛,我廠設(shè)備從最初的ARM9與ARM7平臺(tái)、期間升級(jí)過(guò)度到CortexA8與Cortex M3平臺(tái),再到現(xiàn)在的Cortex M4平臺(tái),圍繞CAN進(jìn)行了一系列產(chǎn)品的開(kāi)發(fā),CAN總線的穩(wěn)定性是毋庸置疑的。
2023-09-26 06:14:38
CAN總線的應(yīng)用范圍廣,應(yīng)用環(huán)境相當(dāng)復(fù)雜,一些靜電、浪涌等干擾很容易耦合到總線上,并直接作用于CAN總線接口。為了滿足一些高等級(jí)EMC的要求,有必要添加額外的外圍保護(hù)電路。CAN接口保護(hù)電路CAN
2023-09-23 08:29:45580 CAN 控制器根據(jù)兩根線上的電位差來(lái)判斷總線電平。總線電平分為顯性電平和隱性電平,二者必居其一。發(fā)送方通過(guò)使總線電平發(fā)生變化,將消息發(fā)送給接收方。
2023-09-22 16:52:00739 
CAN H 電壓也被置于12V。CAN L 對(duì)電源短路的總線波形如下圖所示。 實(shí)際測(cè)量CAN導(dǎo)線的電壓,若CAN L 和CAN H 導(dǎo)線電壓都約為12V,則說(shuō)明出現(xiàn)此類故障。 故障原因:如果不是CAN L 導(dǎo)線對(duì)外部電源短路引起的,那么這種故障就有可能是控制模塊內(nèi)部的CAN收發(fā)器損壞造成的。故障查找
2023-09-14 16:57:081112 
當(dāng)出現(xiàn)CAN L 對(duì)地短路這種故障時(shí),根據(jù)CAN總線的容錯(cuò)特性,可能出現(xiàn)整個(gè)CAN網(wǎng)絡(luò)無(wú)法通信的情況或產(chǎn)生相關(guān)故障碼。 但是對(duì)于某些車系,如海馬車系,其CAN L對(duì)地短路的容錯(cuò)特性較好,車輛基本能
2023-09-14 16:51:491267 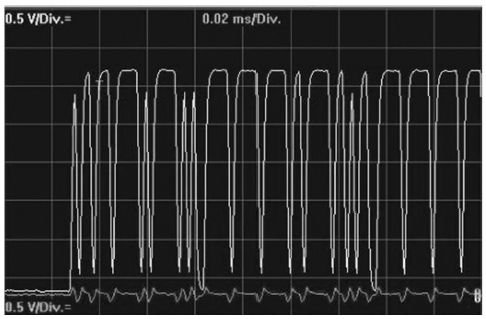
can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車、航空、船舶、工業(yè)自動(dòng)化、機(jī)器人等領(lǐng)域。CAN總線采用串行通信方式,主要用于實(shí)現(xiàn)多個(gè)模塊之間的通信
2023-09-14 16:48:053593 can總線干擾信號(hào)如何消除?? CAN總線是一種廣泛應(yīng)用于自動(dòng)化系統(tǒng)通信的高效數(shù)據(jù)傳輸方式,其基于差分信號(hào)傳輸原理,可以實(shí)現(xiàn)高速、實(shí)時(shí)數(shù)據(jù)傳輸。然而,由于各種原因,CAN總線的信號(hào)通常會(huì)受到干擾
2023-09-14 16:48:032372 1、CAN總線的常見(jiàn)故障 CAN總線錯(cuò)誤分析與解決 當(dāng)CAN總線出現(xiàn)故障或數(shù)據(jù)傳輸異常時(shí),往往會(huì)出現(xiàn)多種奇怪的故障現(xiàn)象,如儀表板顯示異常,車輛無(wú)法啟動(dòng),啟動(dòng)后無(wú)法熄滅,車輛動(dòng)力性能下降,某些電控系統(tǒng)
2023-09-14 16:30:071590 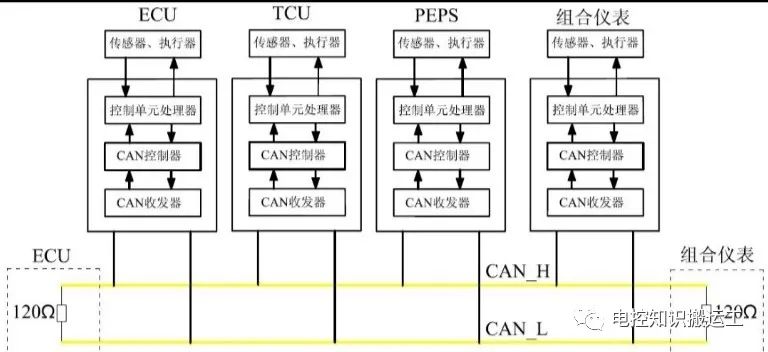
CAN總線是差分信號(hào),兩個(gè)設(shè)備之間使用雙絞屏蔽線纜連接,兩個(gè)線纜分別傳輸CAN_H和CAN_L信號(hào)。
2023-09-14 14:58:031246 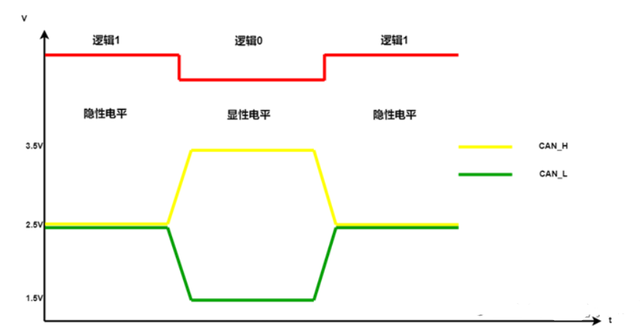
在CAN總線上,利用CAN_H和CAN_L兩根線上的電位差來(lái)表示CAN信號(hào)。
2023-09-13 09:42:28282 
CAN總線通常由兩根線組成:CAN-High(CAN-H)和CAN-Low(CAN-L),也稱為CAN-H線和CAN-L線,這兩根線呈對(duì)稱排列。CAN總線使用差分信號(hào)的方式進(jìn)行通信,通過(guò)在CAN-H和CAN-L線之間傳輸電壓差來(lái)表示數(shù)據(jù)和控制信號(hào)。
2023-09-12 14:59:293894 can總線負(fù)載率怎么計(jì)算? CAN總線是指控制器局域網(wǎng),是一種實(shí)時(shí)性能極高的網(wǎng)絡(luò)協(xié)議,廣泛應(yīng)用于汽車、工業(yè)控制、醫(yī)療儀器等領(lǐng)域。在CAN總線網(wǎng)絡(luò)設(shè)計(jì)中,總線負(fù)載率是一個(gè)非常重要的指標(biāo),它能夠幫助
2023-09-07 15:05:452577 can總線的傳輸速率是多少?? CAN(Controller Area Network)總線是一種控制區(qū)域網(wǎng)絡(luò),是一種高速串行通信總線,廣泛應(yīng)用于汽車、工業(yè)、醫(yī)療和家庭等領(lǐng)域。CAN總線是一種實(shí)時(shí)
2023-09-07 15:05:439411 can總線負(fù)載率多少合理? CAN總線是一種控制器區(qū)域網(wǎng)絡(luò),它是用于在不同設(shè)備之間進(jìn)行通信的技術(shù)。CAN總線的應(yīng)用領(lǐng)域廣泛,例如汽車、航空航天、醫(yī)學(xué)儀器等。在CAN總線中,數(shù)據(jù)通過(guò)網(wǎng)絡(luò)傳輸,并且在
2023-09-07 15:05:412168 can總線波特率一般采用多少 Can總線是指Controller Area Network,是一種高性能的串行通信協(xié)議。Can總線廣泛應(yīng)用于汽車、工業(yè)控制系統(tǒng)以及其他需要大規(guī)模數(shù)據(jù)交換的領(lǐng)域。Can
2023-09-07 15:05:381640 您是否遇到需要使用CAN總線,但MCU沒(méi)有集成CAN總線控制器的情況?您又是否遇到MCU的CAN口資源不夠的情況?一顆CSM330A芯片能解決您的問(wèn)題,本文將帶您了解CSM330A的優(yōu)勢(shì)
2023-09-04 16:41:46643 CAN總線(Controller Area Network)是一種廣泛應(yīng)用于汽車、工業(yè)自動(dòng)化和其他領(lǐng)域的串行通信協(xié)議。以下是幾種常見(jiàn)的CAN總線通信協(xié)議。
2023-08-18 14:40:128798 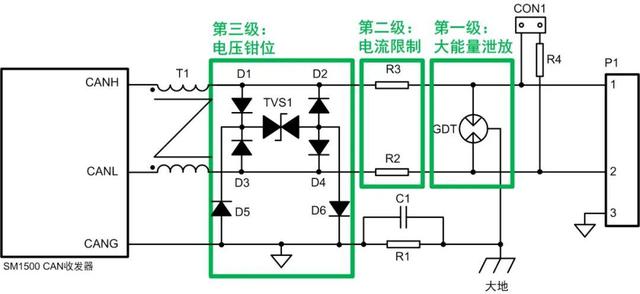
認(rèn)識(shí)CAN 總線錯(cuò)誤的第一步就是了解認(rèn)識(shí)CAN 總線協(xié)議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發(fā)現(xiàn)并解決錯(cuò)誤的。
2023-08-14 15:18:463222 
CAN總線:CAN 是Controller Area Network 的縮寫(xiě)(以下稱為 CAN),是 ISO1 國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。
2023-08-14 14:58:59961 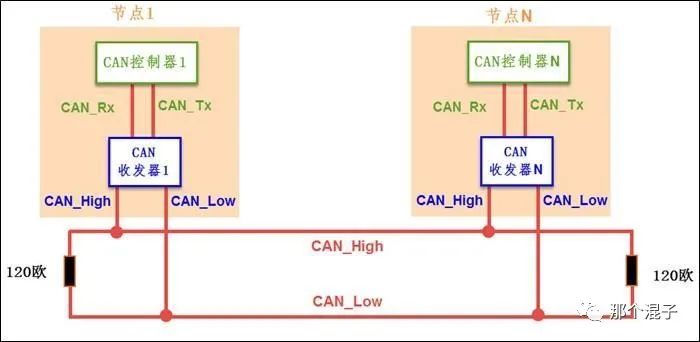
CAN總線和RS485總線都是采用差分信號(hào)傳輸數(shù)據(jù),它們?cè)?b class="flag-6" style="color: red">總線拓?fù)洹⒔K端匹配、信號(hào)衰減、隔離與接地、波特率與通訊距離關(guān)系等方面都是相似的。但是CAN有自己的一些特性,在接口設(shè)計(jì)中,不能照抄RS485接口電路。
2023-08-04 09:30:45452 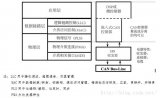
無(wú)論是CAN總線還是485總線,實(shí)際應(yīng)用中經(jīng)常會(huì)出現(xiàn)各種異常,常因總線組網(wǎng)后,波形邊沿出現(xiàn)過(guò)緩、呈“鐮刀”狀的現(xiàn)象,導(dǎo)致數(shù)據(jù)丟失或出錯(cuò),那么這現(xiàn)象前因后果大家是否真正的了解呢?? ?? 案例一 1.
2023-08-01 15:20:16260 
在之前的文章中,小編介紹了幾種常見(jiàn)的短距離無(wú)線通信傳輸技術(shù)和低功耗廣域網(wǎng)絡(luò)(LPWAN),后面的幾期文章將分享常見(jiàn)的有線傳輸方式,如CAN總線、串口通信、USB通信等。LPWAN主流技術(shù)
2023-07-31 16:59:14664 由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-07-31 09:07:29349 
CAN總線負(fù)載率(busload)表征的是單位時(shí)間內(nèi)總線上的位流(bitstream)相對(duì)總線帶寬的占比。
2023-07-27 17:29:26694 
CAN 速率 CAN 總線以幀的形式發(fā)送數(shù)據(jù),但是最終到總線上的就是“0”和“1”這樣的二進(jìn)制數(shù)據(jù),這里就涉及到了通信速率,也就是每秒鐘發(fā)送多少位數(shù)據(jù),前面說(shuō)了CAN2.0 最高速度為 1Mbps
2023-07-25 10:44:05821 
CAN 電氣屬性 CAN 總線使用兩根線來(lái)連接各個(gè)單元:CAN_H 和 CAN_L,CAN 控制器通過(guò)判斷這兩根線上的電位差來(lái)得到總線電平,CAN總線電平分為顯性電平和隱性電平兩種。顯性電平表示邏輯
2023-07-25 10:30:41631 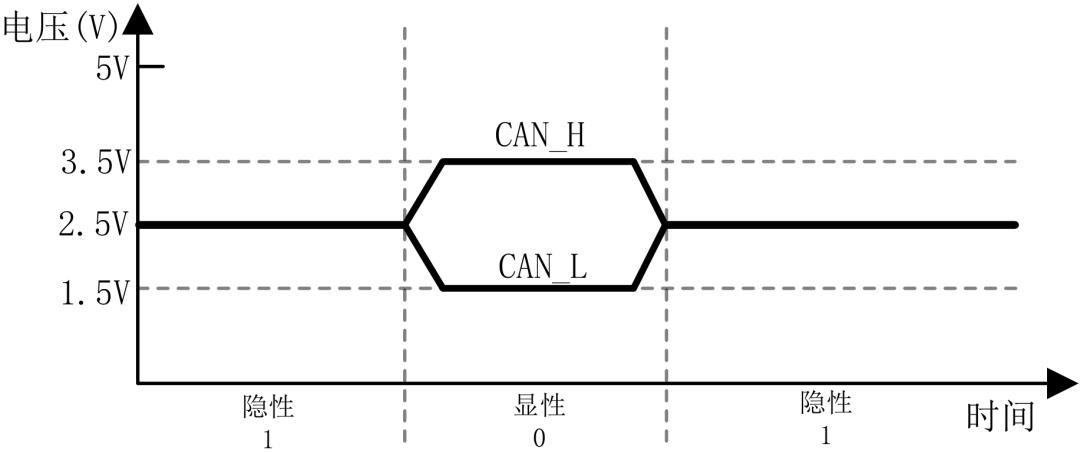
段,CRC段,ACK段和幀結(jié)束,7部分組成。 2.1、幀起始 CAN與CANFD使用相同的SOF標(biāo)志位來(lái)標(biāo)志報(bào)文的起始。幀起始由1個(gè)顯性位構(gòu)成,標(biāo)志著報(bào)文的開(kāi)始,并在總線上起著同步作用。 2.2、仲裁
2023-07-18 10:42:253813 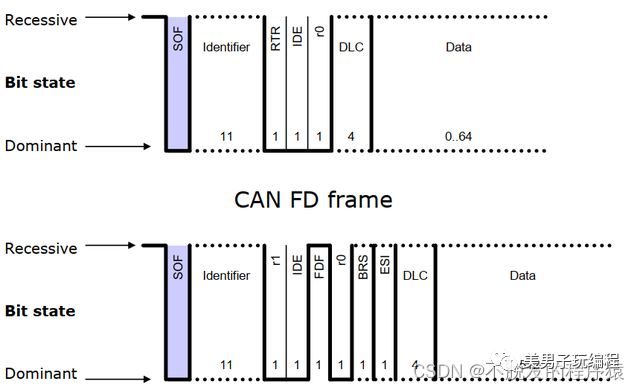
淺談CAN總線入侵檢測(cè)的精度
2023-07-12 10:39:58213 
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此遠(yuǎn)創(chuàng)智控YC-ECT-CAN
2023-07-06 09:55:58514 
要提高CAN總線光端機(jī)的抗干擾能力,可以采取以下幾個(gè)措施: (1)使用屏蔽電纜:選擇具有良好屏蔽性能的電纜來(lái)連接CAN總線光端機(jī)和其他設(shè)備。屏蔽電纜可以有效地阻擋外部電磁干擾對(duì)信號(hào)的影響,減少干擾
2023-06-29 08:10:01422 CAN總線標(biāo)準(zhǔn)只規(guī)定了物理層和數(shù)據(jù)鏈路層,需要用戶自定義應(yīng)用層。不同的CAN標(biāo)準(zhǔn)僅物理層不同。
2023-06-25 15:51:472663 
嵌入式的工程師一般都知道CAN總線廣泛應(yīng)用到汽車中,其實(shí)船艦電子設(shè)備通信也廣泛使用CAN,隨著國(guó)家對(duì)海防的越來(lái)越重視,對(duì)CAN的需求也會(huì)越來(lái)越大。
2023-06-25 09:54:33594 
為了防止故障節(jié)點(diǎn)干擾甚至阻塞整個(gè)CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實(shí)現(xiàn)了復(fù)雜的故障限制機(jī)制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點(diǎn)需要采取以下措施進(jìn)行錯(cuò)誤檢測(cè):
2023-06-21 17:14:181837 
CAN總線終端電阻,一般來(lái)說(shuō)都是120歐姆,實(shí)際上在設(shè)計(jì)的時(shí)候,也是兩個(gè)60歐姆的電阻串起來(lái),而總線上一般有兩個(gè)120Ω的節(jié)點(diǎn),基本上稍微知道點(diǎn)CAN總線的人都知道這個(gè)道理。
2023-06-20 09:54:07609 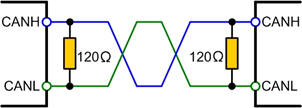
CAN總線是一種常用的總線,對(duì)于剛開(kāi)始接觸CAN總線的,面對(duì)著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識(shí)。
2023-06-19 17:20:141157 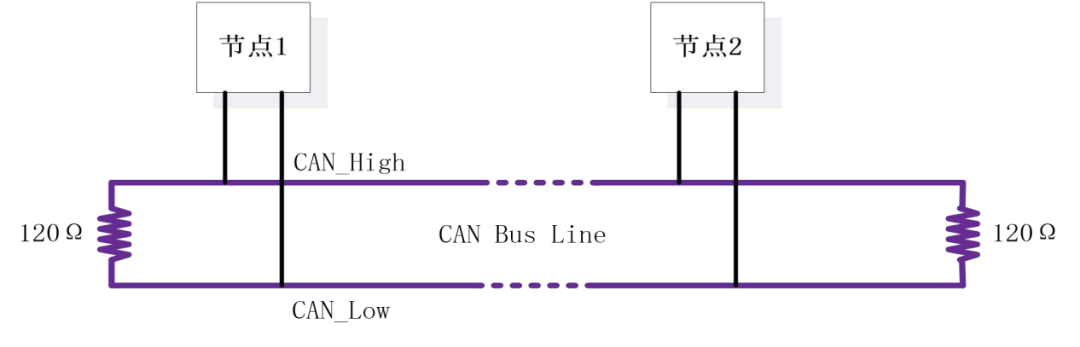
點(diǎn)擊上方 藍(lán)字 關(guān)注我們 摘要:以FPGA 代替?zhèn)鹘y(tǒng)的單片機(jī)和外圍擴(kuò)展芯片, 給出了CAN 總線通信節(jié)點(diǎn)的詳細(xì)設(shè)計(jì)方案。其中以SJA1000為CAN 總線控制器、FPGA 為主控制器, 設(shè)計(jì)實(shí)現(xiàn)通信
2023-06-18 11:15:011791 RK3588-CAN總線
2023-06-10 10:34:28854 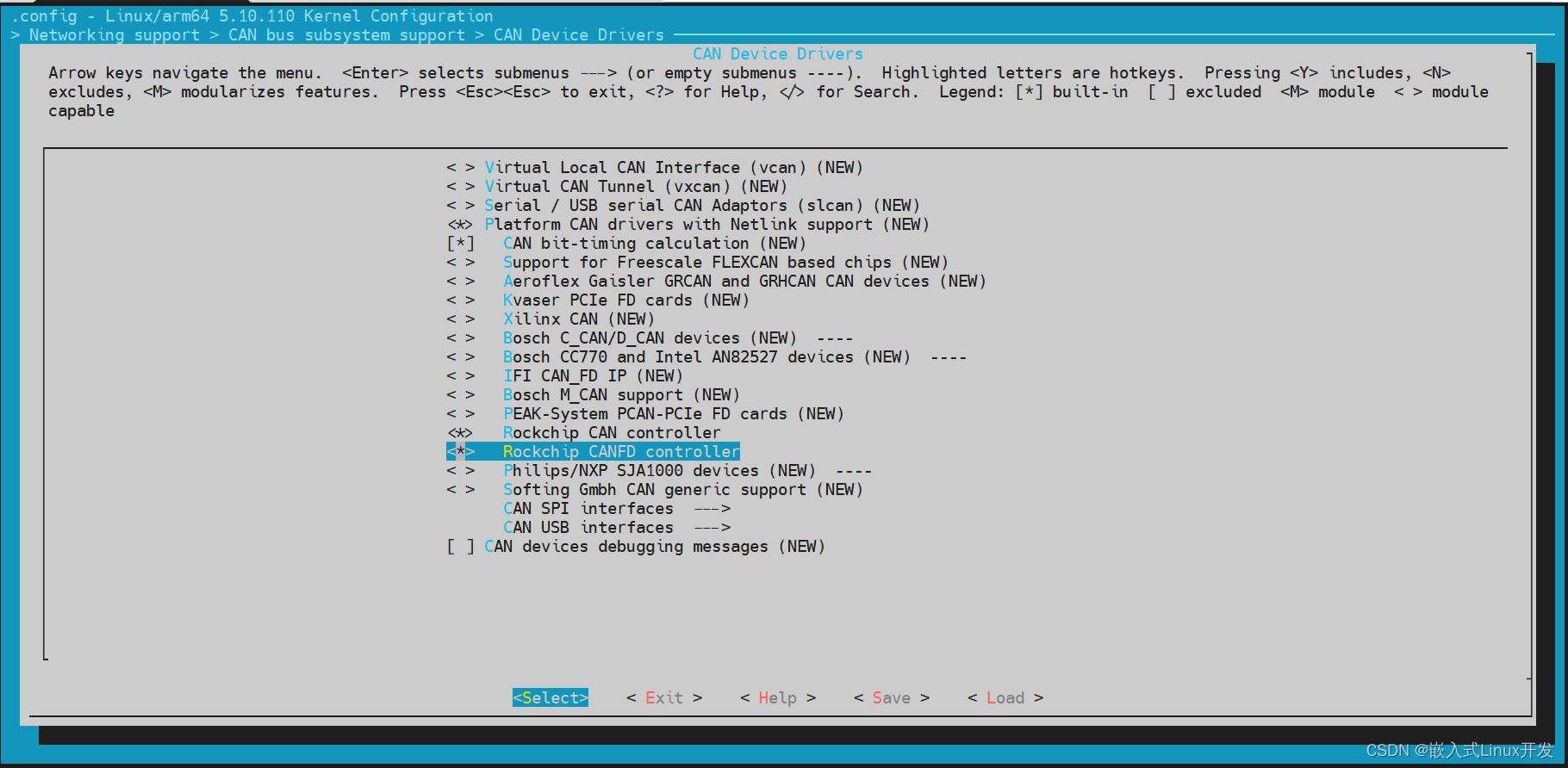
眾所周知,CAN總線的傳輸方式是差分傳輸方式,而總線電平的判斷,就是CAN收發(fā)器根據(jù)CANH和CANL線纜之間的差分電壓(CANH-CANL)來(lái)判斷的,總線上傳輸?shù)?b class="flag-6" style="color: red">電平信號(hào)只有兩種可能,一是顯性電平,二是隱性電平,其中顯性電平代表邏輯0,隱性電平代表邏輯1。
2023-06-09 17:22:033725 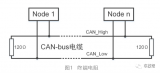
我們知道,CAN總線上的每個(gè)節(jié)點(diǎn)往總線上發(fā)送數(shù)據(jù)的同時(shí),會(huì)讀取總線上的數(shù)據(jù),并與自己發(fā)送的數(shù)據(jù)作對(duì)比。
2023-06-07 09:32:131271 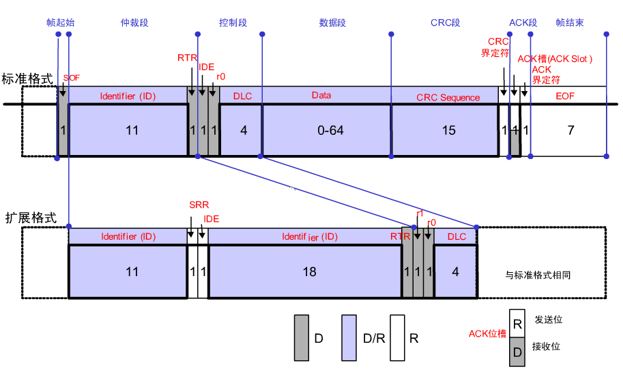
CAN總線的應(yīng)用范圍廣,應(yīng)用環(huán)境相當(dāng)復(fù)雜,一些靜電、浪涌等干擾很容易耦合到總線上,并直接作用于CAN總線接口。為了滿足一些高等級(jí)EMC的要求,有必要添加額外的外圍保護(hù)電路。CAN接口保護(hù)電路CAN
2023-06-05 10:36:292108 今天給大俠帶來(lái)基于FPGA的CAN總線控制器的設(shè)計(jì),由于篇幅較長(zhǎng),分三篇。今天帶來(lái)第一篇,上篇,CAN 總線協(xié)議解析以及 CAN 通信控制器程序基本框架。話不多說(shuō),上貨。
2023-05-18 09:21:30868 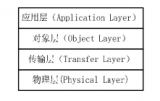
CAN總線在設(shè)計(jì)之初,就規(guī)定了物理層CAN_H和CAN_L采用雙絞線差分傳輸,這樣做的目的是提高抗干擾能力,因?yàn)楫?dāng)總線上CAN_H與CAN_L遇到干擾可以“同上同下”變化,從而差分值保持不變,如下圖所示。
2023-05-17 10:45:523226 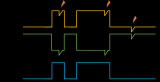
CAN總線是一種常用的總線,對(duì)于剛開(kāi)始接觸CAN總線的,面對(duì)著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識(shí)。CAN2.0協(xié)議分為A版本和B版本,A版本協(xié)議為11位標(biāo)識(shí)符(標(biāo)準(zhǔn)幀),B版本在兼容11位ID標(biāo)識(shí)符的同時(shí),向上擴(kuò)展到29位ID標(biāo)識(shí)符。
2023-05-16 09:49:012297 
如果在CAN高線或CAN低線中出現(xiàn)開(kāi)路,為什么驅(qū)動(dòng)系統(tǒng)數(shù)據(jù)總線會(huì)完全中斷?
2023-05-09 10:55:21
點(diǎn)擊關(guān)注,電磁兼容不迷路。什么是CAN總線CAN總線是一種廣泛用于汽車、工業(yè)自動(dòng)化和其他領(lǐng)域的串行通信協(xié)議。它允許多個(gè)設(shè)備共享通信線路,傳輸數(shù)據(jù)以及控制信號(hào)。CAN總線有兩個(gè)不同的版本
2023-04-21 09:42:31639 
嵌入式的工程師一般都知道CAN總線廣泛應(yīng)用到汽車中,其實(shí)船艦電子設(shè)備通信也廣泛使用CAN,隨著國(guó)家對(duì)海防的越來(lái)越重視,對(duì)CAN的需求也會(huì)越來(lái)越大。這個(gè)暑假,通過(guò)參加蘇州社會(huì)實(shí)踐,去某船舶電氣公司實(shí)習(xí)幾周,也借此機(jī)會(huì),學(xué)習(xí)了一下CAN總線。
2023-04-11 09:30:09608 CAN是是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。
2023-04-10 10:32:301628 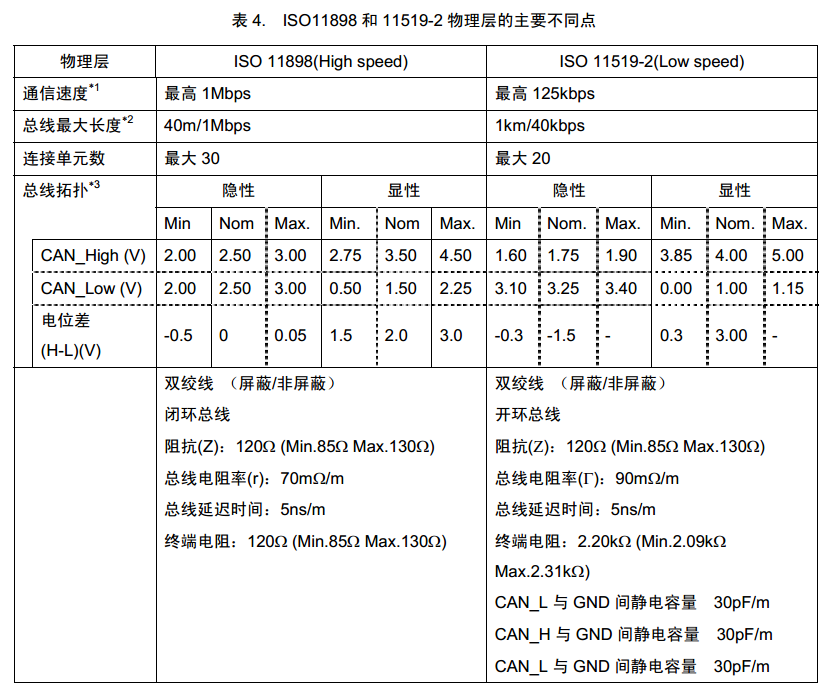
在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒(méi)有關(guān)于總線拓?fù)浣Y(jié)構(gòu)的說(shuō)明):高速CAN總線和低速CAN總線,區(qū)別表如下所示。
2023-04-07 09:30:181834 
應(yīng)用到到許多新開(kāi)發(fā)的設(shè)備中中,但CAN功能的如仲裁、錯(cuò)誤消息檢查、改進(jìn)的帶寬和更大的數(shù)據(jù)場(chǎng),加速了對(duì)CAN總線的需求。原作者:玩轉(zhuǎn)單片機(jī)與嵌入式濟(jì)南行遠(yuǎn)智能科技有限公司
2023-04-03 14:32:15
即從CAN控制芯片輸出邏輯電平到CAN收發(fā)器,然后經(jīng)過(guò)CAN收發(fā)器內(nèi)部轉(zhuǎn)換將邏輯電平轉(zhuǎn)換為差分信號(hào)輸出到CAN總線上,CAN總線上的節(jié)點(diǎn)都可以決定自己是否需要總線上的數(shù)據(jù)。
2023-03-29 10:06:167597
 電子發(fā)燒友App
電子發(fā)燒友App



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論