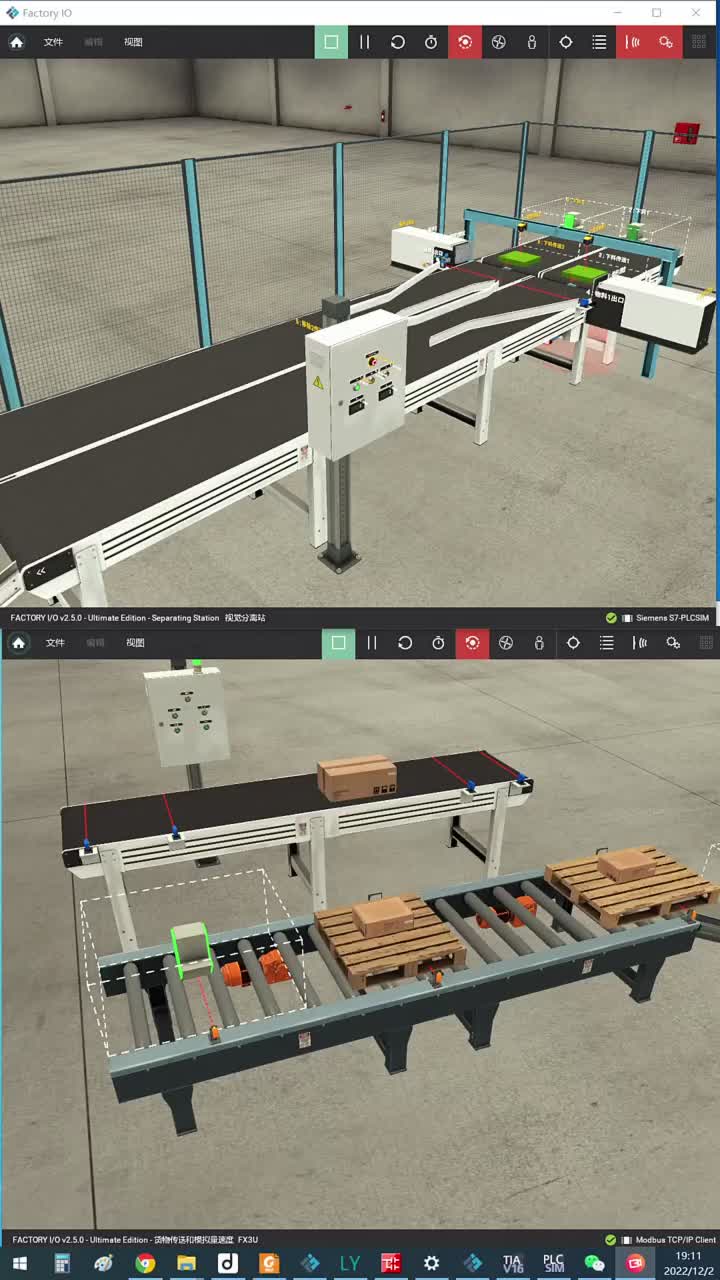
產(chǎn)品介紹 傳送帶視覺檢測設(shè)備是一種集成了機(jī)器視覺技術(shù)的設(shè)備,通常用于在生產(chǎn)線上對(duì)通過傳送帶的產(chǎn)品進(jìn)行實(shí)時(shí)檢測和分析。結(jié)合傳送帶系統(tǒng)和機(jī)器視覺系統(tǒng),高效地進(jìn)行產(chǎn)品檢測、分類、計(jì)數(shù)和質(zhì)量控制,從而
2024-03-11 15:37:06 87
87 
并行通信和串行通信是什么意思?同步傳送和異步傳送又有何區(qū)別? 并行通信是指在數(shù)據(jù)傳輸過程中同時(shí)傳送多個(gè)數(shù)據(jù)位的方式。在并行通信中,每一位數(shù)據(jù)位都有自己的傳輸線,各個(gè)數(shù)據(jù)位之間同時(shí)進(jìn)行傳輸。這種傳輸
2024-02-18 16:55:17215 前言S825產(chǎn)品是博達(dá)智聯(lián)科技公司自主研發(fā)的一款串口PLC遠(yuǎn)程下載模塊,支持虛擬串口功能,能夠?qū)崿F(xiàn)遠(yuǎn)程上下載串口PLC程序,多任務(wù)調(diào)度實(shí)時(shí)系統(tǒng),自動(dòng)上報(bào)位置,自動(dòng)上報(bào)物聯(lián)卡信息,云平臺(tái)自動(dòng)同步,無需
2024-01-31 16:55:32
synchronous conversions. ),
但是我按文檔中的配置,然后運(yùn)行,結(jié)果有點(diǎn)錯(cuò)亂,我使用萬用表測量對(duì)應(yīng)IO口,都是2.5V,但是我使用DAVE觀察變量和寄存器卻有一個(gè)顯示為0。
2024-01-24 07:15:02
,還支持接入多個(gè)PLC/觸摸屏實(shí)現(xiàn)程序遠(yuǎn)程上下載。如果您有特殊需求或者希望將自己的元素融入到BDZL-S930中,博達(dá)智聯(lián)提供網(wǎng)關(guān)定制化服務(wù),滿足生產(chǎn)現(xiàn)場“實(shí)時(shí)傳輸
2024-01-16 14:44:42
傳送網(wǎng)如何實(shí)現(xiàn)頻率同步和時(shí)間同步? 傳送網(wǎng)是指通過網(wǎng)絡(luò)進(jìn)行信息傳輸?shù)募夹g(shù)系統(tǒng),廣泛應(yīng)用于通信、互聯(lián)網(wǎng)等領(lǐng)域。在傳送網(wǎng)中,頻率同步和時(shí)間同步是保證網(wǎng)絡(luò)正常運(yùn)行和數(shù)據(jù)傳輸正確、有序進(jìn)行的重要要素
2024-01-16 14:42:48228 ADUC360 I2Cmaster.c中 master handler 與實(shí)際傳送的數(shù)據(jù)什么關(guān)系,需要傳送的數(shù)據(jù)是要放在數(shù)組里嗎?
2024-01-15 08:26:01
傳送帶控制:PLC可以控制傳送帶的啟停、速度和方向,實(shí)現(xiàn)物料的輸送和分揀。通過讀取傳感器信號(hào),PLC可以實(shí)現(xiàn)自動(dòng)化的物料運(yùn)輸和處理過程。
2024-01-12 09:44:28349 在工業(yè)現(xiàn)場,我們采用了1500系列的PLC,以及帶有EtherCAT通訊協(xié)議的伺服驅(qū)動(dòng)器。由于1500系列的PLC采用的是PROFINET實(shí)時(shí)以太網(wǎng)通訊協(xié)議,為了實(shí)現(xiàn)與EtherCAT設(shè)備的連接
2023-12-29 14:23:03314 
網(wǎng)關(guān),對(duì)GSD文件進(jìn)行添加,使其能夠在博圖中體現(xiàn)在完成硬件設(shè)備的連接和網(wǎng)關(guān)配置之后,我們需要將GSD文件添加到博圖軟件中。GSD文件是用于描述西門子PLC硬件設(shè)備屬性的文件,通過在博圖中添加GSD文件
2023-12-29 14:21:19
在工業(yè)現(xiàn)場,我們采用了1500系列的PLC,以及帶有EtherCAT通訊協(xié)議的伺服驅(qū)動(dòng)器。由于1500系列的PLC采用的是PROFINET實(shí)時(shí)以太網(wǎng)通訊協(xié)議,為了實(shí)現(xiàn)與EtherCAT設(shè)備的連接
2023-12-29 14:18:53167 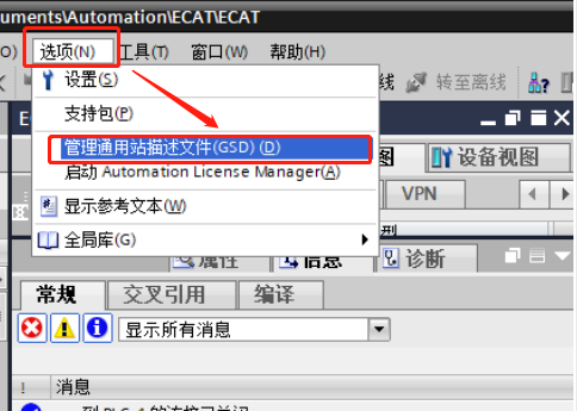
請(qǐng)問encoder的數(shù)據(jù)是記錄在PLC中還是記錄在encoder中。如果PLC的信息丟失,那么encoder當(dāng)前的步數(shù)還能找回么?
2023-12-29 07:14:06
,控制各種類型的機(jī)械或生產(chǎn)過程。 通常PLC的程序由設(shè)備制造商設(shè)計(jì)編寫并存入PLC存儲(chǔ)器中,包括系統(tǒng)診斷程序、輸入處理程序、編譯程序、信息傳送程序及監(jiān)控程序等,從而實(shí)現(xiàn)各種機(jī)械設(shè)備的自動(dòng)化控制。其工作原理可以分為以下幾個(gè)
2023-12-23 13:49:49379 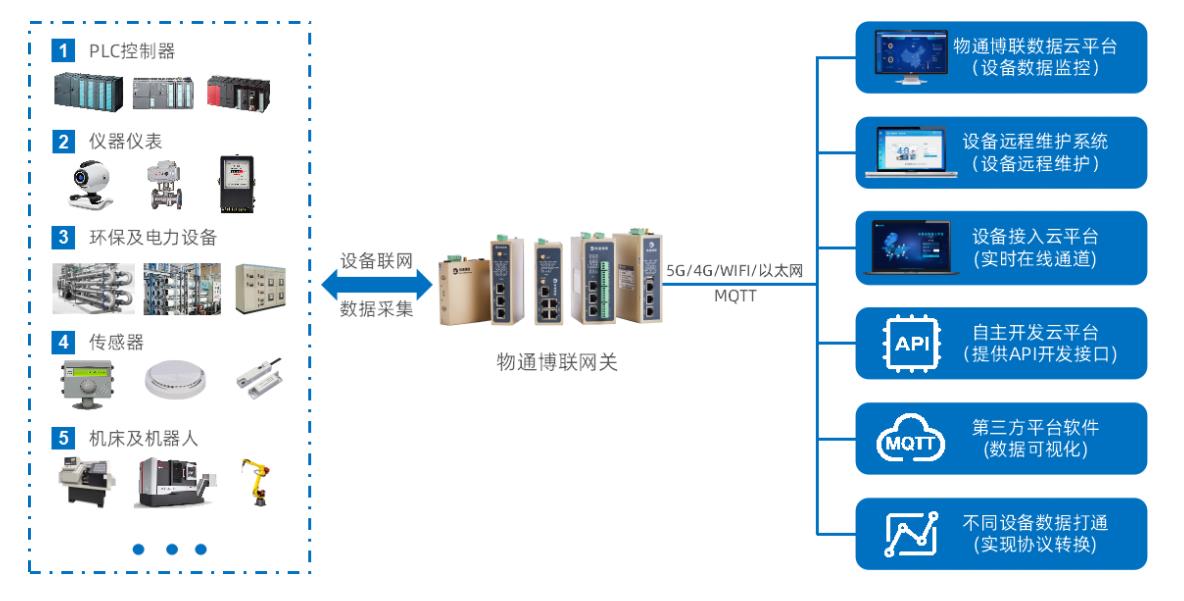
用AD7606同步觸發(fā)采集4路寬度為4us幅值為3.3伏的正脈沖信號(hào)(convert信號(hào)低電平寬度4us,上升沿保證在4路脈沖信號(hào)的中間位置),為什么采集結(jié)果是負(fù)值,而且絕對(duì)值也不是3.3V,但是采集3.3V的直流脈沖信號(hào)是正確的?
2023-12-20 06:54:18
同步電機(jī)的轉(zhuǎn)數(shù)同步究竟是與什么同步啊?
所有的同步電機(jī)的轉(zhuǎn)數(shù)都一樣嗎?還是與電機(jī)的極對(duì)數(shù)有關(guān)系呢?
2023-12-19 06:44:44
系統(tǒng)配置為S1200PLC+第三方伺服放大器+第三方伺服電機(jī)(內(nèi)置絕對(duì)值編碼器),絕對(duì)值編碼器連接電機(jī)與伺服放大器組成位置閉環(huán),系統(tǒng)運(yùn)行時(shí)要求得到伺服電機(jī)的準(zhǔn)確位置,但是第三方伺服放大器無法反饋
2023-12-11 07:33:28
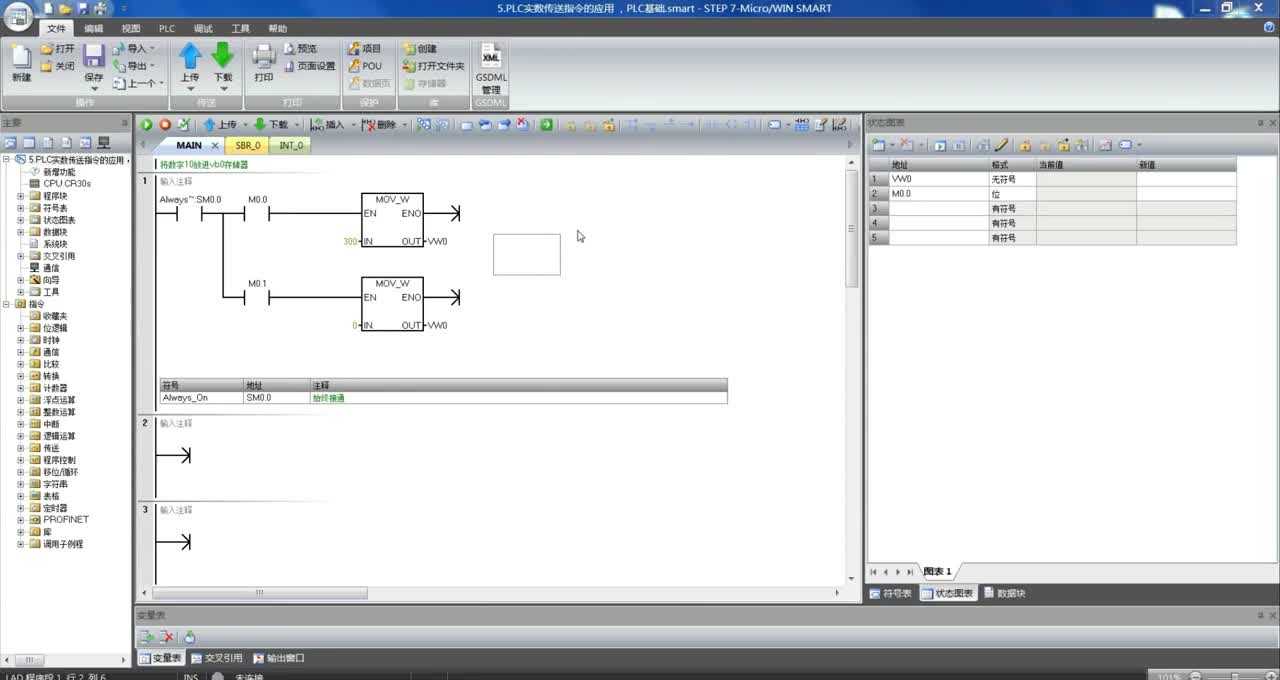
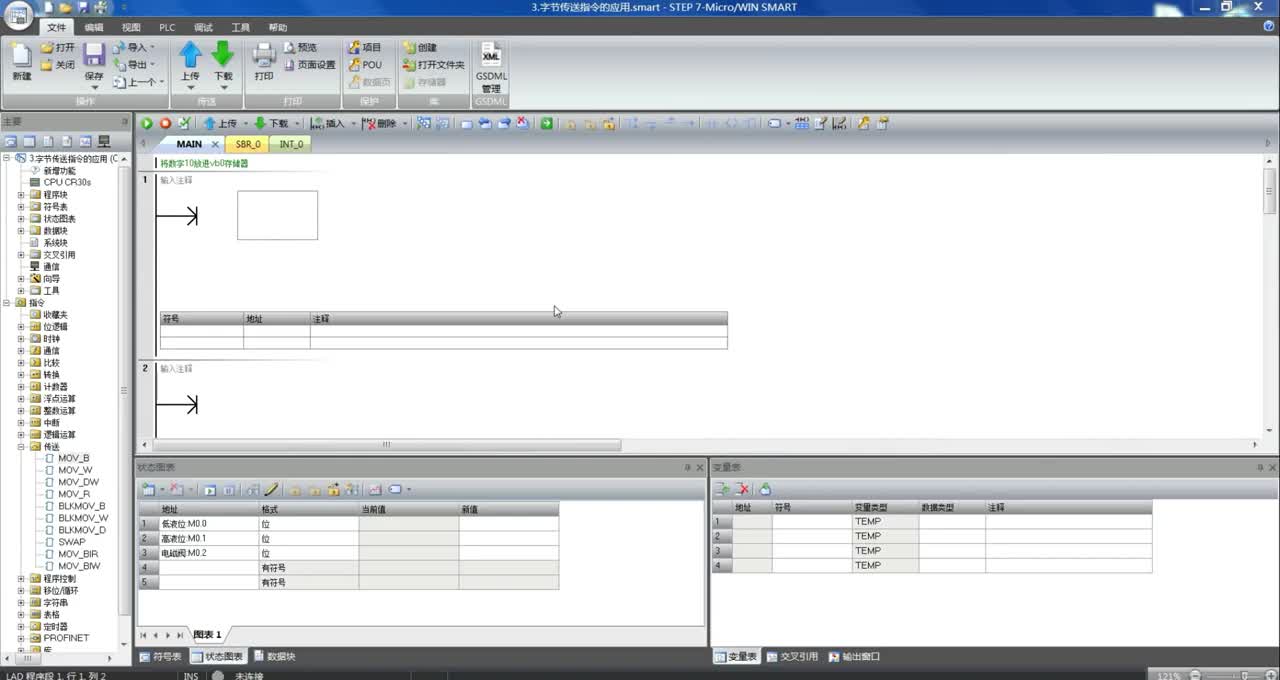
單一數(shù)據(jù)傳送指令用于傳送一個(gè)數(shù)據(jù),根據(jù)傳送數(shù)據(jù)的字長不同,可分為字節(jié)、字、雙字和實(shí)數(shù)傳送指令。單一數(shù)據(jù)傳送指令的功能是在EN端有輸入(即EN=1)時(shí),將IN端指定單元中的數(shù)據(jù)送入OUT端指定的單元中。
2023-12-07 09:46:22637 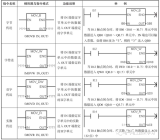
視為傳送帶,對(duì)于不同的傳送帶會(huì)有不同的傳送速率,(在這里默認(rèn)同種傳送帶速率一定且恒定),在傳送帶上運(yùn)輸?shù)囊粋€(gè)行李箱視為一個(gè)比特的數(shù)據(jù).在傳送帶的起始位置有人負(fù)責(zé)將行李箱放置在傳送帶上.
每秒最多可以放
2023-11-27 16:29:02
派克Parker直線驅(qū)動(dòng)器OSP用于自動(dòng)化生產(chǎn)的各個(gè)設(shè)備:自動(dòng)處理裝置、材料處理系統(tǒng)、打孔機(jī)、機(jī)械處理系統(tǒng)、型材切斷機(jī)、切斷機(jī)、噴涂系統(tǒng)、自動(dòng)門系統(tǒng)、自動(dòng)化充液機(jī)、環(huán)境改造工作站、機(jī)械手安裝、研磨機(jī)、傳送帶系統(tǒng)、測量系統(tǒng)、通風(fēng)系統(tǒng)、移動(dòng)式舉升系統(tǒng)、醫(yī)療設(shè)備、傳送帶系統(tǒng)等。
2023-11-10 14:57:07153 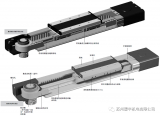
昨天一位粉絲給我私信發(fā)了一個(gè)任務(wù),任務(wù)的內(nèi)容是編寫輸送帶設(shè)備的PLC程序,不過當(dāng)時(shí)在上班沒來得及時(shí)看到消息,實(shí)在對(duì)不住。在這里就給你補(bǔ)上補(bǔ)上。
2023-11-10 12:22:26504 
PLC 可編程邏輯控制器是種專門為在工業(yè)環(huán)境下應(yīng)用而設(shè)計(jì)的數(shù)字運(yùn)算操作電子系統(tǒng)。
PIC一是指Microchip的單片機(jī)
一是指可編程中斷控制器(Programmable Interrupt
2023-11-09 07:22:15
電機(jī)轉(zhuǎn)一圈同步帶轉(zhuǎn)多少怎么計(jì)算
2023-11-07 06:51:25
RTT中的消息同步機(jī)制是如何實(shí)現(xiàn)的
2023-11-02 07:00:20
視為傳送帶,對(duì)于不同的傳送帶會(huì)有不同的傳送速率,(在這里默認(rèn)同種傳送帶速率一定且恒定),在傳送帶上運(yùn)輸?shù)囊粋€(gè)行李箱視為一個(gè)比特的數(shù)據(jù).在傳送帶的起始位置有人負(fù)責(zé)將行李箱放置在傳送帶上.
每秒最多可以放
2023-11-01 15:04:20
PLC是一種常見的自動(dòng)化控制設(shè)備,廣泛應(yīng)用于各種工業(yè)和商業(yè)領(lǐng)域。以下是十種適合使用PLC控制運(yùn)行的機(jī)器設(shè)備: (1)自動(dòng)化生產(chǎn)線:PLC可用于控制和監(jiān)視生產(chǎn)線上的各種設(shè)備,如機(jī)器人、傳送帶、裝配線
2023-11-01 09:50:041379 歐姆龍PLC與上位機(jī)連接時(shí)一般采用的是Hoslink協(xié)議,它是一種簡易經(jīng)濟(jì)的通訊方式,比較適合一臺(tái)上位機(jī)和一臺(tái)PLC或者多臺(tái)PLC進(jìn)行通訊。上位機(jī)可對(duì)漂亮C進(jìn)行程序傳送和讀寫等操作。HOSTLINK
2023-10-27 09:43:07841 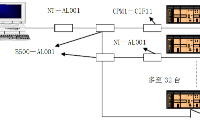
PLC的運(yùn)動(dòng)控制是指PLC系統(tǒng)通過控制運(yùn)動(dòng)設(shè)備的運(yùn)動(dòng)軸,實(shí)現(xiàn)精確、穩(wěn)定和可編程的運(yùn)動(dòng)控制功能。它可以控制運(yùn)動(dòng)設(shè)備(如電機(jī)、伺服驅(qū)動(dòng)器等)的位置、速度和加速度等參數(shù),以實(shí)現(xiàn)所需的運(yùn)動(dòng)軌跡和運(yùn)動(dòng)邏輯
2023-10-23 08:08:08602 
PLC的運(yùn)動(dòng)控制是指PLC系統(tǒng)通過控制運(yùn)動(dòng)設(shè)備的運(yùn)動(dòng)軸,實(shí)現(xiàn)精確、穩(wěn)定和可編程的運(yùn)動(dòng)控制功能。它可以控制運(yùn)動(dòng)設(shè)備(如電機(jī)、伺服驅(qū)動(dòng)器等)的位置、速度和加速度等參數(shù),以實(shí)現(xiàn)所需的運(yùn)動(dòng)軌跡和運(yùn)動(dòng)邏輯。
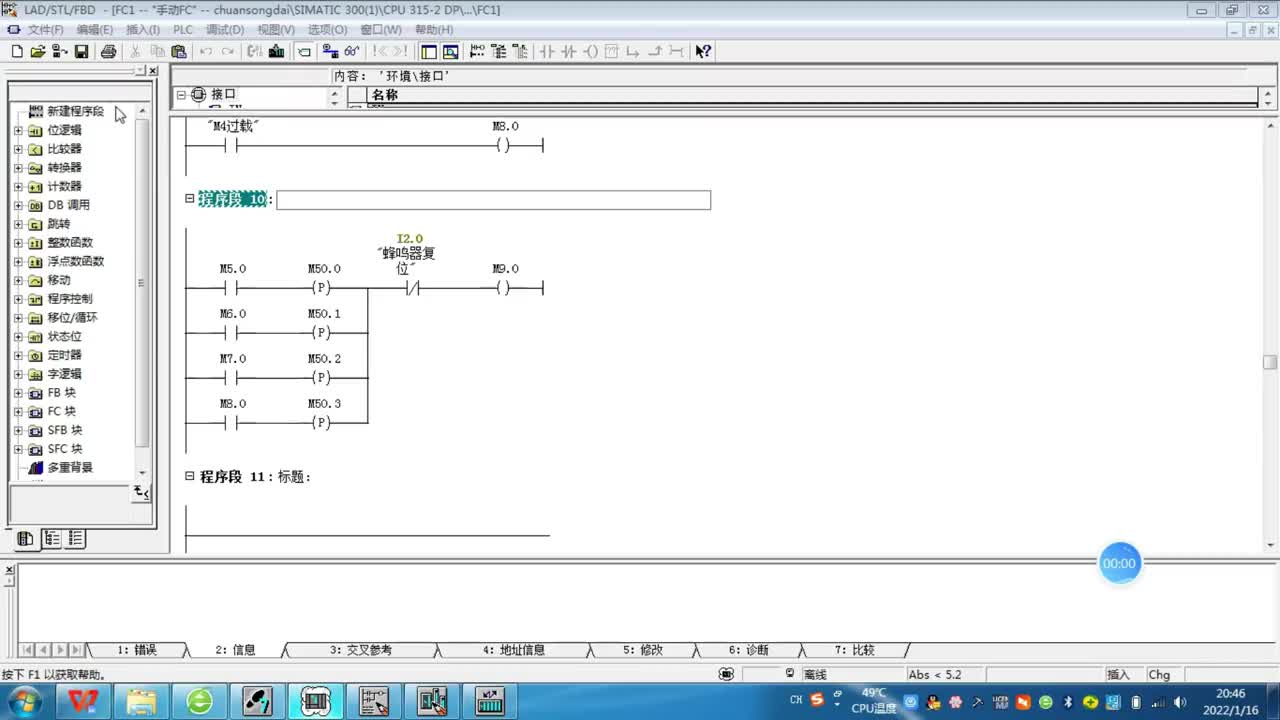
2023-10-20 10:20:13679 在第三個(gè)程序段中,查詢是否沒有置位輸入?yún)?shù)“START_INPUT” 。 如果沒有置位,則將復(fù)位控制傳送帶的兩個(gè)輸出,并置位輸出“Conveyor_DONE”。
2023-10-12 16:02:10684 
要?jiǎng)?chuàng)建 STL 函數(shù)塊“STL-Conveyor”,請(qǐng)按以下步驟操作
2023-10-12 16:00:18314 
Rsync(remote synchronize)是一個(gè)遠(yuǎn)程數(shù)據(jù)同步工具,可通過LAN/WAN快速同步多臺(tái)主機(jī)間的文件。Rsync使用所謂的“Rsync算法”來使本地和遠(yuǎn) 程兩個(gè)主機(jī)之間的文件達(dá)到同步,這個(gè)算法只傳送兩個(gè)文件的不同部分,而不是每次都整份傳送,因此速度相當(dāng)快。
2023-10-12 14:54:12106 。 應(yīng)用場景 1. 自動(dòng)化生產(chǎn)線 PLC可用于控制生產(chǎn)線上的各種機(jī)械設(shè)備,例如傳送帶、機(jī)械手臂、機(jī)床等。通過采集PLC數(shù)據(jù),可以實(shí)現(xiàn)生產(chǎn)過程和設(shè)備狀態(tài)的實(shí)時(shí)監(jiān)控,有助于提高生產(chǎn)效率和質(zhì)量。 2. 物料配送系統(tǒng): PLC可用于控制物料的運(yùn)輸、分
2023-10-09 14:36:18525 FSMC外擴(kuò)SRAM數(shù)據(jù)之間是怎么傳送的?先保存在FSMC再傳送外擴(kuò)SRAM
2023-09-27 06:03:22
運(yùn)動(dòng)控制
? 精確的位置控制 – 多軸協(xié)調(diào) – 選擇放置, 成形切削 – 自動(dòng)化測試, DUT處理 ? 精確的速度控制 – 傳送帶,變速電動(dòng)機(jī)
? 高速I/O同步
2023-09-19 06:25:20
傳送帶用于對(duì)貼片產(chǎn)品的傳送。傳送帶在長期使用過程中會(huì)有磨損,經(jīng)過一定時(shí)間會(huì)斷裂,這時(shí)就需要更換。需要有至少1份的備件,對(duì)于經(jīng)常磨損的部位可能有2份。
2023-09-18 15:11:31167 安全帶拉力試驗(yàn)機(jī) 在各種材料的研究和開發(fā)過程中,拉伸試驗(yàn)是評(píng)估其基本力學(xué)性能的重要手段。本文將介紹安全帶、紙張、海綿、隔膜橡膠、電池隔膜、聚酯薄膜的拉伸試驗(yàn)以及水泥袋強(qiáng)度試驗(yàn)、汽車膜保護(hù)膜
2023-09-18 11:20:14
和Cortex-A55小核心。其中,大核心主頻高達(dá)3.13GHz,中核心主頻為2.54GHz,小核心主頻為2.04GHz。這種三級(jí)架構(gòu)的設(shè)計(jì)理念,可以充分發(fā)揮不同核心在不同任務(wù)下的優(yōu)勢,從而實(shí)現(xiàn)更高效的性能表現(xiàn)。根據(jù)華為
2023-08-31 09:34:09
應(yīng)用程序: 演示 PWM 同步函數(shù)
BSP 版本: M480系列 BSP CMSIS V3.04.000
硬件: NuMaker-FPM-M487 v3.0
PWM 同步函數(shù)用于在相位制作
2023-08-30 06:41:33
波峰焊的基本原理相當(dāng)簡單。在將元件放置在 PCB 上,并將其引線插入通過 PCB 鉆孔或沖孔的孔(“通孔”)中后,將組件放置在傳送帶上。傳送帶將組件移動(dòng)通過液態(tài)焊料罐(通常稱為“罐”)。
2023-08-25 12:37:47914 
/to/toolchain\"替換為實(shí)際的交叉編譯工具鏈路徑,將\"/path/to/hisi_sdk\"替換為實(shí)際的海思SDK路徑。
更新環(huán)境變量:在終端中執(zhí)行以下命令使配置的環(huán)境變量
2023-08-25 09:57:14
/to/toolchain\"替換為實(shí)際的交叉編譯工具鏈路徑,將\"/path/to/hisi_sdk\"替換為實(shí)際的海思SDK路徑。
更新環(huán)境變量:在終端中執(zhí)行以下命令使配置
2023-08-17 09:32:12
,由從機(jī)向主機(jī)發(fā)送數(shù)據(jù)的通道
SPI的工作基于移位寄存器:為實(shí)現(xiàn)數(shù)據(jù)傳輸或數(shù)據(jù)接收,主設(shè)備和從設(shè)備包含了專用的移位寄存器,通常是8位或16位。工作過程就像一個(gè)環(huán)形傳送帶:由主機(jī)逐位將數(shù)據(jù)放在傳送帶
2023-08-16 06:05:36
檢測到的傳送帶傳送方向用右箭頭或左箭頭指示。如果傳送的其它物料正在從右邊接近 PEB1 或從左邊接近 PEB2,顯示的箭頭最初會(huì)關(guān)閉
2023-08-12 11:49:02709 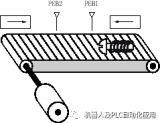
SCL(Structured Control Language,結(jié)構(gòu)化控制語言)是一種基于 PASCAL 的高級(jí)編程語言。這種語言基于標(biāo)準(zhǔn) DIN EN 61131-3(國際標(biāo)準(zhǔn)為 IEC 1131-3)。
2023-08-10 14:38:23493 
下圖顯示了一個(gè)站,用于將玻璃容器從托盤上移走。傳送帶再將托盤傳送到站。
2023-08-10 14:07:24527 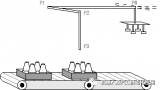
今天主要講解一下關(guān)于西門子Smart line系列觸摸屏如何與S7-1200PLC與時(shí)間同步這方面的干貨。讓大伙更進(jìn)一步的學(xué)好PLC,掌握S7-1200CPU日期時(shí)向數(shù)據(jù)結(jié)構(gòu)與 smartline日期時(shí)間數(shù)據(jù)結(jié)構(gòu)及轉(zhuǎn)換方法。
2023-08-04 14:59:522498 
在RT-Thread Studio中執(zhí)行【從MDK同步到RT-Studio】出現(xiàn)如下錯(cuò)誤
[1660] Failed to execute script main
Traceback (most
2023-08-02 18:27:24
STL (語句列表)是一種基于文本的編程語言,可用于編寫邏輯塊。STL 程序以程序段的形式組成。
2023-07-25 17:43:05501 
下圖顯示的系統(tǒng)中包含兩條傳送帶和一個(gè)臨時(shí)存儲(chǔ)區(qū),臨時(shí)存儲(chǔ)區(qū)位于兩條傳送帶之間。傳送帶 1 將包裹傳送到該存儲(chǔ)區(qū)。
2023-07-20 10:44:34515 
:通過 wifi 為簡單的 5v RGB 燈帶供電并進(jìn)行控制。我想讓 nodemcu 生成自己的 wifi,
所以;我安裝了 nodemcu、5v RGB 燈帶、面包板和 Arduino 1.8.13
2023-06-06 13:43:34
大家好..
我已經(jīng)將 ESP8266 編程為在 MODBUS TCP/IP 和 PLC (LSIS) 上運(yùn)行,通過以太網(wǎng) MODBUS 連接到路由器。我通過路由器成功地在它們之間建立了連接(使用在
2023-05-30 08:57:22
模擬量信號(hào)是?動(dòng)化過程控制系統(tǒng)中最基本的過程信號(hào)(壓力、溫度、流量等)輸?形式。系統(tǒng)中的過程信號(hào)通過變送 器,將這些檢測信號(hào)轉(zhuǎn)換為統(tǒng)?的電壓、電流信號(hào),并將這些信號(hào)實(shí)時(shí)的傳送至控制器(PLC
2023-05-22 15:55:181418 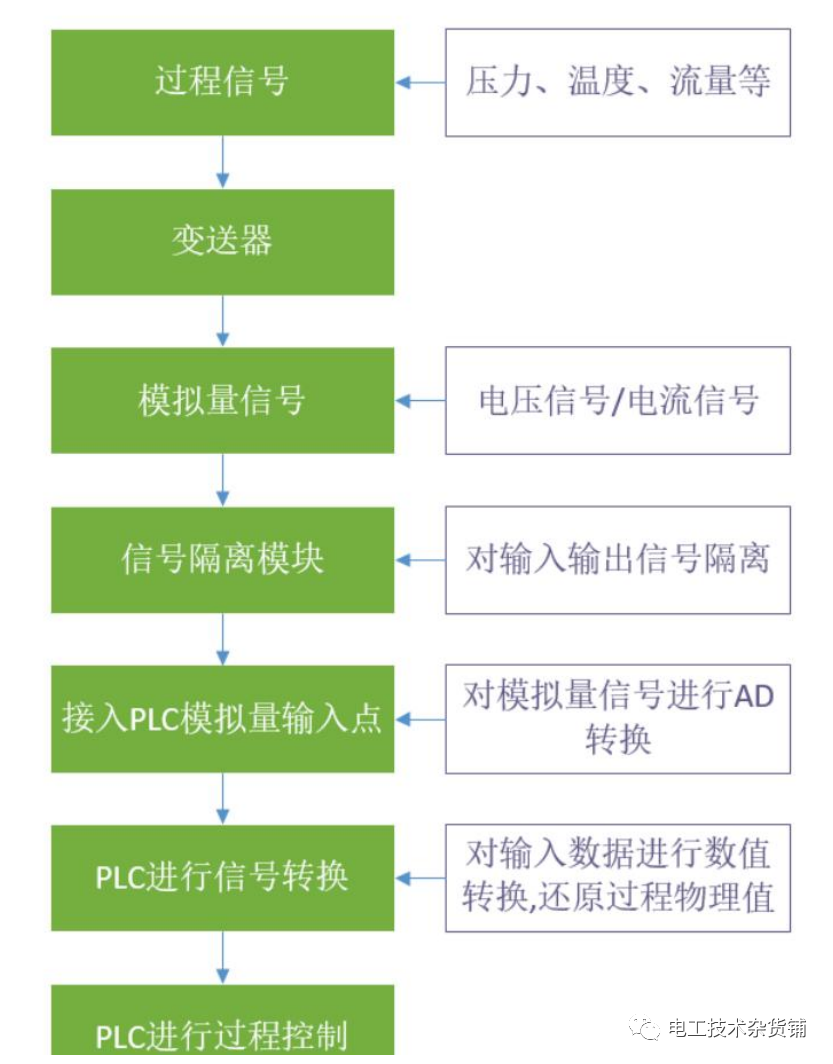
程序的寫入是指將程序由編程計(jì)算機(jī)送入PLC,讀出則是將PLC內(nèi)的程序傳送到計(jì)算機(jī)中。程序的讀出操作過程與寫入基本類似,可參照學(xué)習(xí),這里不做介紹。在對(duì)PLC進(jìn)行程序?qū)懭牖蛘咦x出時(shí),除了要保證PLC與計(jì)算機(jī)通信連接成功外,PLC還需要接上工作電源。
2023-05-22 10:34:591445 
我正在使用 ESPTOUCH 應(yīng)用程序?qū)?esp8266 進(jìn)行智能配置。配置成功后,esp 設(shè)備將連接到網(wǎng)絡(luò),然后網(wǎng)絡(luò)的 BSSID 和 IP 將顯示在 ESPTOUCH 應(yīng)用程序中。是否有可能自定義從 esp 設(shè)備傳送到應(yīng)用程序的數(shù)據(jù)?我們可以將自己的數(shù)據(jù)發(fā)送到 ESPTOUCH 應(yīng)用程序嗎?
2023-05-15 07:07:55
,需要每一個(gè)傳輸節(jié)點(diǎn)都支持PTP(Pricise Time Protocol,精準(zhǔn)時(shí)間協(xié)議)協(xié)議,并且還要求上下行鏈路的時(shí)延完全一致,這一點(diǎn)在現(xiàn)網(wǎng)中實(shí)施起來非常困難。
分布式時(shí)鐘同步的代表技術(shù)為
2023-05-10 17:09:50
還是30分鐘。如果在其他時(shí)刻這兩個(gè)表的時(shí)間始終相差30分鐘的話,就可以認(rèn)為它們走的快慢一致,是頻率同步的。
相位同步是指兩個(gè)基站的時(shí)鐘的相位始終保持一致。
還以表A和表B為例,在相位同步下
2023-05-10 16:06:10
30分鐘。如果在其他時(shí)刻這兩個(gè)表的時(shí)間始終相差30分鐘的話,就可以認(rèn)為它們走的快慢一致,是頻率同步的。
相位同步是指兩個(gè)基站的時(shí)鐘的相位始終保持一致。
還以表A和表B為例,在相位同步下,它們
2023-05-06 12:37:03
隨著近年來智能制造的興起,許多生產(chǎn)設(shè)備需要PLC改造或者出廠時(shí)配置PLC。它可以實(shí)現(xiàn)從設(shè)計(jì)者到機(jī)器設(shè)備互聯(lián)互通的最高境界。
傳統(tǒng)的生產(chǎn)設(shè)備,廠內(nèi)設(shè)計(jì)者或者研發(fā)者通過紙本打印或者ERP系統(tǒng)傳送生產(chǎn)
2023-04-20 14:27:01 0
0 最后新建行三菱的D100到D109寫入歐姆龍的D200到D209填入需要相互傳送的數(shù)據(jù)寄存器最后上傳DEA模塊就可以了!這樣就完成了三菱PLC與歐姆龍PLC通訊數(shù)據(jù)交換。
2023-04-20 11:43:261 倉儲(chǔ)上空【每個(gè)倉儲(chǔ)站上空有對(duì)應(yīng)的限位傳感器】、下降、吸盤釋放、回原點(diǎn)),傳送帶工件繼續(xù)過來時(shí),會(huì)循環(huán);D.按停止鍵,循環(huán)結(jié)束,但機(jī)械臂仍會(huì)完成當(dāng)前循環(huán)直到回原點(diǎn)才會(huì)停止動(dòng)作。 機(jī)械臂原點(diǎn)、抓取、放置圖
2023-04-20 11:29:320 根據(jù)PLC、CNC和數(shù)控機(jī)床的關(guān)系,可將PLC分為內(nèi)裝型PLC和獨(dú)立型PLC兩類。
1、內(nèi)裝型PLC 內(nèi)裝型PLC從屬于CNC裝置,PLC與CNC間的信號(hào)傳送在CNC裝置內(nèi)部實(shí)現(xiàn)。PLC與數(shù)控機(jī)床之間的信號(hào)傳送則通過CNC輸入 /輸出接口電路實(shí)現(xiàn),如圖1所示。
2023-04-19 11:27:510 有一些關(guān)于 FlexRay KeySlot 的問題。當(dāng) ARXML 中定義的 KeySlotUsage 為 False 時(shí),這個(gè)槽/節(jié)點(diǎn)是否可以做同步或啟動(dòng)功能?
2023-04-19 06:17:11
PLC的寄存器分為單字(Word)和雙字(Dword),W ord占用2個(gè)字節(jié)Byte,Dw ord占用4個(gè)字節(jié)Byte; 在PLC和其他設(shè)備通訊往往以字節(jié)為單位進(jìn)行傳送的,根據(jù)不同的通訊協(xié)議,傳送
2023-04-18 09:42:062 模擬量信號(hào)是自動(dòng)化過程控制系統(tǒng)中最基本的過程信號(hào)(壓力、溫度、流量等)輸入形式。系統(tǒng)中的過程信號(hào)通過變送器,
將這些檢測信號(hào)轉(zhuǎn)換為統(tǒng)一的電壓、電流信號(hào),并將這些信號(hào)實(shí)時(shí)的傳送至控制器(PLC
2023-04-10 11:03:210 PLC輸入端接線S/S與X0-X13之間的關(guān)系。當(dāng)S/S接入+24V信號(hào)時(shí),通過開關(guān)給X0端子通入0V信號(hào),S/S與X0之間產(chǎn)生DC24V電壓,X0指示燈亮,給PLC程序傳送輸入信號(hào)。
2023-04-08 10:13:31728 比如某個(gè)系統(tǒng)中,以傳送帶軸作為主軸,而傳送帶是由變頻器控制的,那么就可以在該變頻器控制的軸上添加同步編碼器,以此當(dāng)作輸入軸:同步編碼器軸。
2023-03-31 17:19:101401 PLC的PID控制怎么實(shí)現(xiàn)閉環(huán)控制?在程序中采用PID調(diào)節(jié)指令就可以了嗎,是不是伺服電機(jī)走長了,可用PID調(diào)整那這輸入誤差怎么得到?比如說輸出與輸入誤差積分成正比,是不是如果有誤差,PLC就會(huì)算出這個(gè)值,然后在輸出值上面加上去或減掉???
2023-03-30 17:18:02
同步編碼器軸的定義為:通過外部連接的同步編碼器的輸入脈沖驅(qū)動(dòng)輸入軸的情況下使用同步編碼器軸。
2023-03-30 14:40:221206 S7-200 plc的輸出端子位于plc下端而輸入端子位于plc上端是這樣嗎?
2023-03-30 13:51:48
自動(dòng)模式下按自動(dòng)啟動(dòng)按鈕,引入傳送帶自動(dòng)運(yùn)行,當(dāng)貨物觸碰A傳感器時(shí),長傳送帶正方向運(yùn)轉(zhuǎn);如果A傳感器和B傳感器20秒內(nèi)沒有貨物經(jīng)過,則停止此傳送帶。
2023-03-30 13:45:112626 NUCLEO BOARD PLC GPIO
2023-03-30 11:49:41
提供時(shí)間同步和頻率同步的方法,能適合于不同傳送平臺(tái)的時(shí)頻傳送,既可以基于1588v2的時(shí)間戳以基于分組的時(shí)間傳送(TOP)方式單向傳遞頻率,也可使用IEEE1588v2的協(xié)議實(shí)現(xiàn)時(shí)間同步。
2023-03-30 09:38:09908 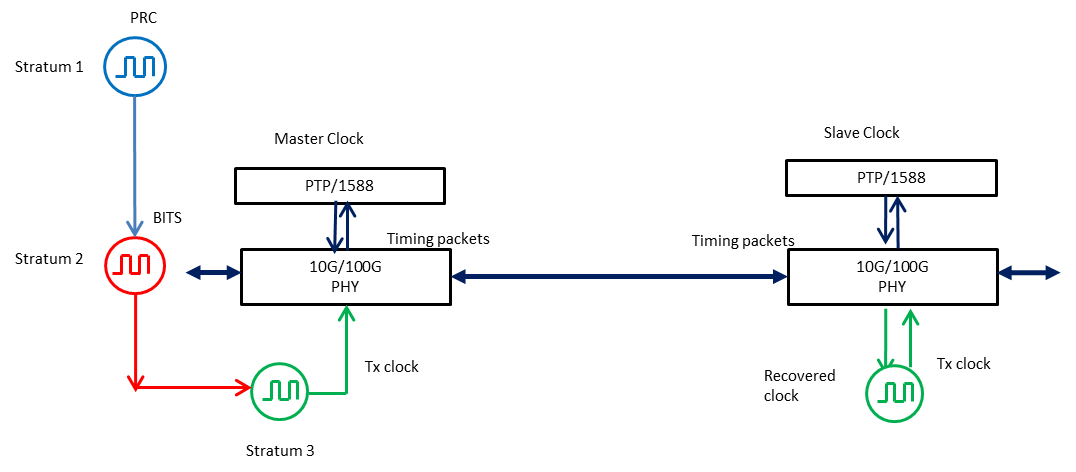
的,而NI Vision中只有一個(gè)overlay rectange的函數(shù),這個(gè)函數(shù)無法繪制帶角度的矩形,而實(shí)際項(xiàng)目中會(huì)有需要生成帶角度的矩形的情況,因此做了一個(gè)子VI,可以根據(jù)帶角度矩形的中心點(diǎn)X
2023-03-29 17:09:17
自動(dòng)模式下按自動(dòng)啟動(dòng)按鈕,引入傳送帶自動(dòng)運(yùn)行,當(dāng)貨物觸碰A傳感器時(shí),長傳送帶正方向運(yùn)轉(zhuǎn),當(dāng)貨物觸碰B傳感器時(shí),長傳送帶反方向運(yùn)轉(zhuǎn)。
2023-03-28 10:39:577084 功率可達(dá)200kW; ④效率較高,約0.98。 同步帶的選型 03. 1、已知條件 場景:同步帶上輸送物品質(zhì)量為m=1.8kg,所需傳遞的功率P=10W,帶輪轉(zhuǎn)速為n=100r/min
2023-03-27 17:09:59
同步編碼器軸的定義為:通過外部連接的同步編碼器的輸入脈沖驅(qū)動(dòng)輸入軸的情況下使用同步編碼器軸。
2023-03-26 14:56:081190 永磁同步電機(jī)的同步指的是什么?又與什么同步呢?
2023-03-23 09:44:50
 電子發(fā)燒友App
電子發(fā)燒友App























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論