 電子發燒友App
電子發燒友App


一種用于電動自行車改裝的制動能回收電路
周松濤
( 雙林集團上海電子研發中心,上海 201799)
摘要:就目前市面上在售和社會已保有電動自行車都沒有制動能回收功能的現狀,提出了一種完全基于硬件控制、接線簡單、改裝容易的制動能回饋控制電路方案,用于現有電動自行車的后加裝制動能回收,以提高現有電動自行車的行駛里程,并給出了具體的實現電路。利用電路設計軟件Altium Designer中的仿真功能模擬不同車速下的電機發電狀態對電路進行了仿真驗證,仿真結果驗證了該電路在不同車速下能有效地實現制動能量的回收。
關鍵詞:制動能回饋;續航里程;能量回收控制;電路仿真;電動自行車;
?
引言
電動自行車在目前還是城鄉居民短途出行的主要交通代步工具,在國內保有量巨大。由于電池成本及體積重量等原因要增加電動自行車的行續航里程單獨依靠增大蓄電池的容量來實現已經非常困難,所以制動能回收利用對提高電動自行車的續航里程有著非常實際的意義。尤其在城市道路中行駛,由于紅綠燈頻繁、行人和車輛眾多,電動自行車行駛過程中會頻繁地出現起步、加速與制動等動作,在這種路況下實現制動能回收利用,對提升電動自行車的行駛里程更是意義重大。有研究表明,在行駛狀況變化比較頻繁的路段,采用制動能量回收可增加續駛里程約20%。但從目前市面上在售的和居民保有的電動自行車來看和都不具備制動能回收再利用的功能,針對這一現狀,設計一款完全由硬件實現、外部連接簡單、改裝容易的電動自行車制動能回收控制電路,用于改裝現有電動自行車,有著巨大的商業價值和社會環保價值。
?
1 制動能回收的基本原理
??? 制動能量回收是指在電動自行車制動時,將車輛運動時的動能依靠發電機轉化成電能儲存在電動自行車的儲能裝置(蓄電池或超級電容)中,而發電機在給儲能裝置(蓄電池或超級電容)充電時會產生一定的電磁阻力使電動自行車速度降低,達到制動的目的;當電動自行車再次啟動或加速時控制系統又將存儲的能量再次轉化為電動自行車行駛時所需要的能量。這樣就可以減少機械制動時車輛的動能變為摩擦熱能的消耗 ,有效地減少了能耗,增加一次充電的續行里程數,提高了電動自行車的能量使用效率。
1.1 電動自行車制動過程的能量轉換
假設車輛是在水平的道路上行駛,電動自行車在制動過程中,從初始車速V0減速至車速V1,其能量轉換關系為:
1/2mV02 - 1/2mV12 = Wf + Wa + Wb
式中 m為電動自行車加上人體及所載物品的總質量,Wf為滾動阻力及傳動阻力所作的功,Wa為空氣阻力所作功的和,Wb為制動力所作的功。
其中,滾動阻力和空氣阻力及傳動阻力所作的功(消耗的能量)是無法加以回收的;而制動力由機械摩擦力和電機再生制動時的電磁力兩部分組成,機械摩擦制動力使車輛減速所作的功都轉化成熱能散發在空氣中不能被回收利用,所以只有電機產生的再生制動時產生的電磁力才能將車輛運動過程中的動能轉化成電能,通儲能裝置(蓄電池或超級電容)存儲起來加以重新利用。
1.2 電動自行車的制動模式
具備制動能回饋系統電動自行車的制動模式一般有以下幾種模式:緊急制動模式、正常制動模式、長下坡制動模式。
(1)緊急制動模式是在電動自行車車速較快出情況下,出于安全考慮,需要車輛快速停止情況下所采用的制動模式。在這種模式下機械制動的摩擦力和電機工作在發電制動狀態時的電磁力是同時發揮制動作用共同完成制動過程。但由于一般路況下緊急制動出現的頻次較少,加上制動過程持續時間很短,所以在這種模式下能夠回收的能量較少,大部分的動能多消耗在機械制動摩擦所產生的熱能上。
(2)正常制動模式是在電動自行車行駛過程中需要減速但不急于使車輛停止時采取的制動模式。這種制動模式下制動過程明顯地被分成了減速過程和停止過程兩個階段,在減速階段為了最大限度地回收制動能量,制動力矩完全由工作在制動發電狀態的驅動電機的電磁力提供;在車速降到一定程度后,由于電機在低轉速下產生的電動勢已經很小,加上制動能回饋電路中某些電子元器件本身電氣參數特性的限制(如二極管的正向壓降等),驅動電機的制動扭矩已經很小(或基本消失)不足于使車輛完全停止下來,這時為了讓車輛完全停止下來,應及時切換到機械制動狀態,這個過程就是停止階段。這兩個制動過程的切換點由電機特性和控制系統的參數來共同確定,掌握好正確的切換點就能夠回收盡可能多的制動能量。
(3)長下坡制動模式是電動自行車在長距離下坡道上行駛時,為了使車輛保持在一定的安全車速而采取的一種制動模式。這種制動模式和普通正常制動模式中的減速階段類似,制動力矩完全由工作在發電狀態的驅動電機的電磁力提供,可以將車輛下坡時由勢能產生的車輛動能轉化成電能存儲起來加以回收利用。
1.3 能量回饋系統的控制策略
制動能量回饋系統的控制策略,其實質就是在保證安全的前提下,為了使能量最大程度的被回收利用,使制動過程工作在最合適的制動模式。基于成本的原因,電動自行車制動能量回收策略不需要(也不可能)像電動汽車那樣,有復雜的(軟硬件)算法,制動過程中制動模式的切換是完全是由駕駛人員的意志通過操作電動自行車的剎車手柄來完成。
本設計使用的電動自行車制動能回收的策略是在電動自行車剎車手柄捏下1/3 行程以內時制動力矩完全由電機發電制動的電磁力提供,在這種情況下,系統能提供較多制動能回饋;在剎車手柄捏下超過1/3行程后,制動力矩由電機發電制動時的電磁力和機械制動的摩擦力共同提供,在這種情況下只有部分的制動能被回收利用。
選取剎車手柄1/3行程處作為機械制動的切換點是基于以下的考慮:
1、剎車把手的行程1/3是人手比較容許把控的點,由于制動策略的實施是完全依賴于駕駛人員的意志通過人手實現的,所以制動模式的切換點必須在選在人手易于把控的位置;
2、制動模式的切換點如果設置過小(如剎車手把行程的1/5或1/10),人手不易把控,容易使機械制動過早地介入,不利于制動能的最大回收利用;
3、制動模式的切換點如果設置過大(如剎車手把行程的1/2或2/3),人手切換到機械制動需要較長的時間,在緊急情況下不利于行安全。
?
2 控制電路設計
由于電路設計目的是用于現有電動自行車制動能回收的加改裝,所以控制電路的設計應使外部的連線盡可能的最少,并且不能改變電動自行車的原有線路,以確保電動自行車原有線路的安全完整。
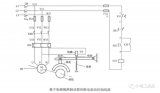
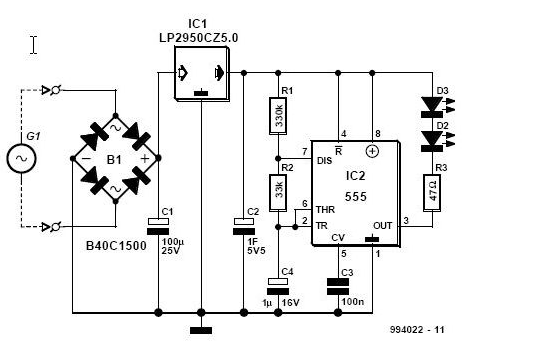
制動能回收電路是否需要工作是通過判斷電動自行車剎車燈開關是否閉合來實現的。電動自行車的剎車燈開關分為高邊控制和低邊控制兩種方式,高邊控制是指剎車開關是串連在電源端和剎車燈之間 的一種控制方式,低邊控制是指剎車燈開關串連在剎車燈與地之間的一種控制方式。目前市面上的電動車存在兩種不同的制動燈控制方式,論文針對這兩種不同方式分別設計了兩種制動能回收電路。圖1和圖2別給出了這兩種適合不同制動燈控制方式的電動自行車制動能回收控制器的原理圖。
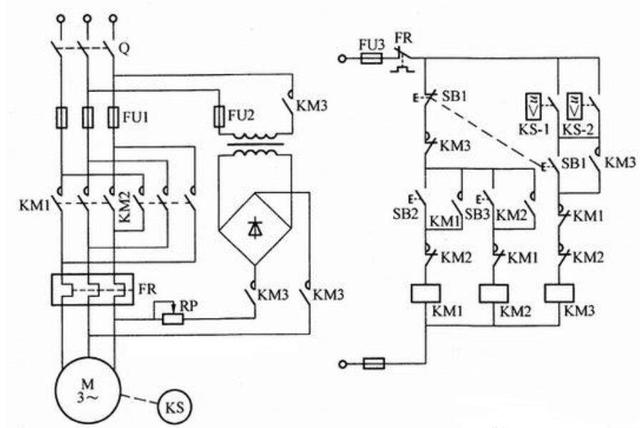
圖1:用于制動燈開關在高邊的主動能回收控制原理圖
?
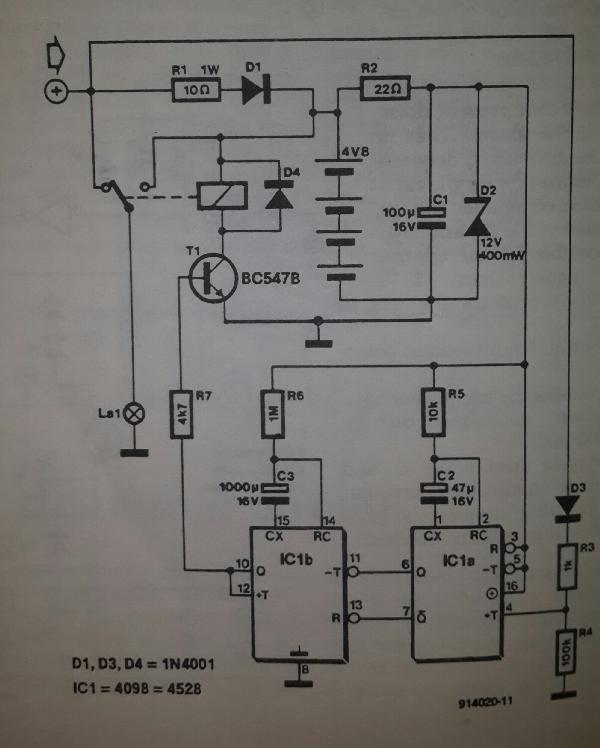
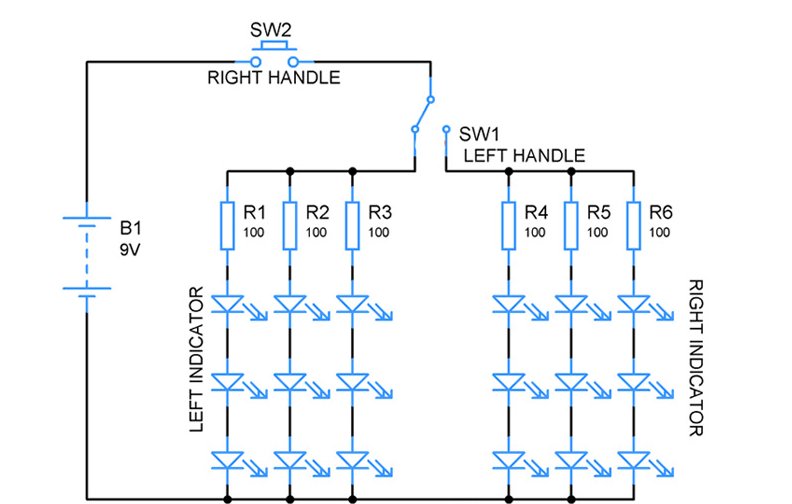
圖2 用于制動燈開關在低邊的制動能回收控制原理圖
?
2.1 控制電路與電動自行車的連接
(1)控制動燈控制為高邊制的電動自行車連接:將制動能回收控制電路中的Pa、Pb、Pc端口分別連接電動自行車驅動電機A、B、C三個相線(沒有相序要求,可以任意連接),控制電路中的P-端口連接電動自行車蓄電池的負極、P+端口連接蓄電池正極,控制電路中的P12端口連接制動燈的正端,只需6根連線就可以使普通的電動自行車具有制動能回收功能,無需改動電動自行車原有的電路。圖1虛線框外為連接示意圖(端口Pg可以不連接)。
(2)制動燈控制為低邊控制的電動自行車連接:和制動燈控制為高邊控制的一樣,將制動能回收控制電路中的Pa、Pb、Pc端口分別連接電動自行車驅動電機A、B、C三個相線(沒有相序要求,可以任意連接),控制電路中的P-端口連接電動自行車蓄電池的負極、P+端口連接蓄電池正極;不同的是,控制電路中的P12端口連接是電動自行車DC/DC模塊的12V輸出端口,需要多連接一個端口Pg至制動燈的開關,需7根連線,比高邊控制方式的多一根連接線,和高邊控制方式一樣也無需改動電動自行車原有的電路。圖2虛線框外為連接示意圖 。
2.2 電路的工作原理
制動能回收的基本原理是在車輛制動期間使驅動電機工作在發電狀態,給蓄電池充電,但驅動電機即使在全速運行狀態(驅動電路給電機施加占空比為100%的工作電壓的運行狀態)電機的反電動勢也不可能超過電源電壓,所以如果沒有制動能回饋控制器的協助,雖然在車輛制動期間驅動電機的端口有電勢出現,沒有制動回收電路的普通電動自行車是不會有能量回饋給蓄電池。
本電路的工作原理見圖1和2是將電動自行車的驅動電機三相直流無刷電機在制動時輸出的 三相交流電經D4至D9等6個二極管組成的三相全橋整流,經C1濾波后在D點得到一個直流電壓,由于這個電壓比蓄電池的電壓低,所以不可能直接給蓄電池充電。因此由L1、Q1和D1組成一個典型的Boost升壓電路,通過電感L將驅動電機輸出的電壓較低的能量搬運到電壓較高的蓄電池中。R是一個電流采樣電阻,U1A組成一個運算放大器,將R兩端的電流信號放大51倍后 送到比較器 U2A的反向輸入口與U1B組成的電壓跟隨器輸出的電流設定值進行比較。比較器是遲滯比較器,遲滯電壓被控制在正負0.7V左右(由二極管D2和D3雙向限制),當電流低于設定值加一個固定的遲滯值時比較器輸出一個高電平,這個電平經Q2、Q3電流放大后驅動Q1(MOSFET)導通,這樣驅動電機經整流后的電壓就加在電感L兩端,電感中的電流將隨時間線性上升,上升的斜率與驅動電機整流后的輸出電壓有關,這期間電感L從驅動電機獲取能量J=1/2(⊿i+)2L。同時電流采樣電阻R上的電壓也隨電流增加,經運放放大后送到比較器輸入端的電壓也相應增加,當大于設定值+0.7V后比較輸出變為低電平,這時Q1被迅速關閉截止。由于電感中的電流不能突變,電流將經二極管D1給蓄電池充電,期間電感L種的電流隨時間直線下降,電感中電流下降的斜率和蓄電池電壓的高低有關。這期間電感向蓄電池轉移能量J=1/2(⊿i-)2L。此時采樣電阻R上的電壓也隨著下降,經運放放大后送到比較器輸入端的電壓也降低,當低于設定值-0.7V是,比較器輸出又跳變為高電平,Q1又將被打開,電感又開始從驅動電機輸出取得能量,循環往復,整個電路形成一個自我閉環的自激震蕩。
?
3 電路的仿真分析
電路仿真是利用電路設計軟件Altium Designer中Pspise仿真模塊進行電路瞬態仿真分析。為了簡化分析,將電路中制動過程中工作在發電狀態的驅動電機和整流電路用一個可變的直流電壓源來模擬,電動自行車中的蓄電池用一個48V的直流電壓源來模擬,這樣的模擬和實際是比較吻合的,蓄電池本來就是個直流電壓源;驅動電機在制動期間工作在發電狀態,其端口輸出的是三相交流電壓,經整流濾波后得到一個直流電源,所以也可以把它看作一個直流電壓源,只不過這個電壓會隨車速不同而變化,車速低時輸出電壓也低,車速高時輸出電壓也比例升高。
圖3 是實際用于仿真分析的電路原理。圖中,電壓源V2用于模擬車輛在制動期間驅動電機經整流濾波后的輸出電壓;電壓源V3用于模擬電動自行車中48V的蓄電池;電壓源V1用于模擬提供電路工作的12V電源。R0是為了觀察充電電流波形而設置的一個采樣電阻,由于其阻值設得很小(可以把它看作V3的一個內阻),不會影響仿真的結果,其它部分的電路是和控制器的實際電路完全一樣。
圖3 用于仿真的制動能回饋控制電路
首先設置電壓源V2電壓設為1V來模擬車速較低時驅動電機整流后的輸出電壓,對電路進行仿真,來驗證電動自行車在車速較低的時候制動能量是否有效回饋給蓄電池。圖4是該狀態下得仿真波形,圖中藍色的是F點是驅動Q1的電壓波形,紅色的是E點是電路給蓄電池充電的電壓波形,r0[i]為充電電流波形,L1[i]為電感中的電流波形。電感中電流上升的時間實際是從電壓源V2(模擬驅動電機在制動發電時的電壓)吸取能量的過程,電感中電流下降的這段時間實際是電感中的能量向電壓源V3(模擬電動自行車中的48V蓄電池)充電轉移的過程。從仿真波形的結果可以看出,由于車速較低時動能較小,充電電流波形的占空比很小,平均充電電流很小,回收到的能量也就較小。
圖4 V2設為1V來模擬車速很低情況下制動時控制電路的仿真波形
圖5 是將電壓源V2電壓設為24V模擬一般車速下制動時控制電路的工作波形。從充電電流波形可以看出,此時充電電流的占空比較大,平均充電電流也較大,這說明車較快時,車輛動能就大,回收到的制動能也較多。
圖5 V2設為24V來模擬一般車速下制動時控制電路的仿真波形
圖6 是將電壓源V2電壓設為47V模擬車輛高速情況下制動時的控制電路的工作波形。這時充電電流波形的占空比已經很高,所以平均充電電流也高,回收的制動能量也高。
圖6 是將電壓源V2電壓設為47V模擬車輛高速情況下制動時的控制電路的工作波形。這時充電電流波形的占空比已經很高,所以平均充電電流也高,回收的制動能量也高。
圖6 V2設為47V時模擬較高車速時制動能回收電路的仿真波形
5 結論(結語)
1.這是一個純硬件工作原理的能量回收電路,實現簡單,不需要復雜的控制算法,在實際的商業的設計考慮中實用性很高,成本低,跟現有電動自行車原有電路不沖突,不需要改變原有電路,可實施性很高。
2.從電路原理仿真結果看,能量回饋在整個車速范圍之內制動能都能有效回收,能達到制動能回收的目的延長了一次充電后的續航里程。符合國家提倡的環保節能的政策。
3. 這是一個完全原創的能量回饋控制電路,在現有市面上的電動自行車一般都沒有制動能回收裝置,所以對新型環保電動自行車有巨大的市場需求和商業價值。
仿真結果驗證了給電路,在從低速到高速不同的車速下制動時,都能有效地回收制動能量給電池充電。
參考文獻:
[1] 期刊——婁潔,戴龍泉. 電動汽車制動能量回收控制策略研究[J]. 《安徽科技學院學報》, 2010, 24(3): :13-18[2]楊建軍,黃海波,王永忠,李平飛.汽車構造實驗教學環節探討[J].實驗科學與技術,2011(2):105-108.
[3]朱為國.汽車構造課程理論和實踐教學改革探索[J].中國冶金教育,2009(6):44-45.
[4]劉紹娜,李書偉.汽車構造課程教學的思考[J].科教文匯,2011(3):59,63






































 工商網監
工商網監
評論