 電子發(fā)燒友App
電子發(fā)燒友App


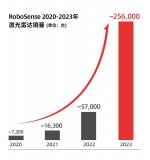
隨著激光雷達(dá)近幾年的高效發(fā)展,有起初的自動駕駛,再到后來AGV領(lǐng)域,由掃描式到固態(tài),不難看出,它的技術(shù)越來越成熟,并為各行各業(yè)領(lǐng)域都帶來了難以代替的作用。
今天想要分享的是激光雷達(dá)與交通測速。說起測速,大家第一想到的就是微波雷達(dá)(多普勒雷達(dá)),的確,這種技術(shù)在國內(nèi)已經(jīng)是太過于成熟,無論是它的安裝使用的難度和產(chǎn)品的成本,目前來看,無疑是最為普遍并最為廣大執(zhí)法部分所接受的產(chǎn)品。相比雷達(dá)測速,激光雷達(dá)測速儀起初并不被各大國內(nèi)公司看好,因為它安裝使用的復(fù)雜性,并且這種未知的功能也打消了大部分公司做研發(fā)的念頭。可事實(shí)確實(shí)激光雷達(dá)測速儀確實(shí)有著微波雷達(dá)不可達(dá)到的優(yōu)勢。
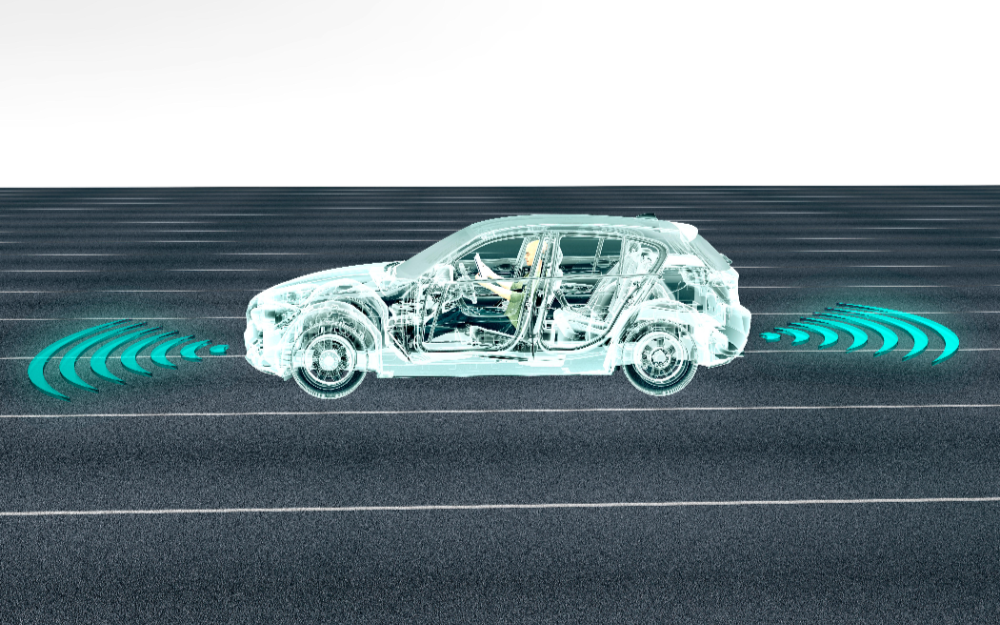
雷達(dá)測速的原理是應(yīng)用多譜勒效應(yīng),即移動物體對所接收的電磁波有頻移的效應(yīng),雷達(dá)測速儀是根據(jù)接收到的反射波頻移量的計算而得出被測物體的運(yùn)動速度。激光測速儀是采用激光測距的原理。激光測距是通過對被測物體發(fā)射激光光束,并接收該激光光束的反射波,記錄該時間差,來確定被測物體與測試點(diǎn)的距離。激光測速是對被測物體進(jìn)行兩次有特定時間間隔的激光測距,取得在該一時段內(nèi)被測物體的移動距離,從而得到該被測物體的移動速度。對比二者的原理,總結(jié)出以下性能上的區(qū)別:
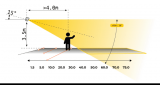
(1)由于該激光光束基本為射線,估測速距離相對于雷達(dá)測速有效距離遠(yuǎn);
(2)鑒于激光測速的原理,激光光束必須要瞄準(zhǔn)垂直與激光光束的平面反射點(diǎn),又由于被測車輛距離太遠(yuǎn)、且處于移動狀態(tài),或者車體平面不大,而導(dǎo)致執(zhí)勤警員的工作強(qiáng)度很大、很易疲勞。目前,LeddarTech公司生產(chǎn)的3DFlash原理的激光雷達(dá)專門用于解決這一問題。東莞市交警支隊東城大隊使用這種改進(jìn)后的測速儀抓拍超速車輛,已經(jīng)取得了明顯的成效。
(3)雷達(dá)測速誤差為±1Km/h,激光雷達(dá)測速誤差為1km/h。
對于雷達(dá)測速以下的幾個劣勢,激光雷達(dá)測速可以有效地解決:
1.測速雷達(dá)如果天線放置不當(dāng),當(dāng)?shù)貏轂榉瞧皆瓲顟B(tài)時,會使目標(biāo)車的讀數(shù)被其它車的速度代替。
2.如果目標(biāo)旁邊有反射能力更強(qiáng)的物體存在,測速雷達(dá)也只能測到反射能力強(qiáng)的物體。
3.當(dāng)有兩車并行時,雷達(dá)測速儀無法分辨出哪一輛車是超速車輛。
4.當(dāng)測量信號經(jīng)過多次反射后,測速雷達(dá)測出的結(jié)果也會出錯。
5.無線電波會對測速雷達(dá)產(chǎn)生干擾,使測量結(jié)果失真。
6.雷達(dá)感應(yīng)器可以偵察到雷達(dá)測速儀卻極難偵察到激光測速儀的存在。
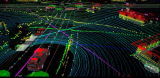
接下來給大家舉個案例,加拿大Logix ITS公司使用LeddatTech的固態(tài)16線激光雷達(dá)與紅外相機(jī)結(jié)合制成的測速產(chǎn)品,
該產(chǎn)品融合激光雷達(dá)和紅外相機(jī),整套系統(tǒng)提供精確的光學(xué)飛行時間傳感技術(shù),可通過實(shí)時照片捕捉和記錄交通違規(guī)行為。它包括首個完全集成的2D多光束紅外速度執(zhí)行攝像頭以及16通道光傳感器。憑借精確的車輛跟蹤技術(shù),它可以識別多種車輛速度,同時仍然無法檢測到雷達(dá)或激光探測器。所有數(shù)據(jù)都會自動傳輸?shù)皆贫恕?/span>
特點(diǎn)如下:
1.通過三維環(huán)境模型來計算真實(shí)的車輛速度,可以檢測精確的車輛速度,甚至是多車道中的多輛車輛。
2.可在各種天氣條件下全面運(yùn)行,無需軟件即可提供零占地面積。
3.可以通過電池供電或降低電源要求自主運(yùn)行。
4.隨時隨地訪問速度數(shù)據(jù),以便執(zhí)行和分析











































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論