 電子發燒友App
電子發燒友App


編碼器工作原理
絕對脈沖編碼器:APC
增量脈沖編碼器:SPC
兩者一般都應用于速度控制或位置控制系統的檢測元件.
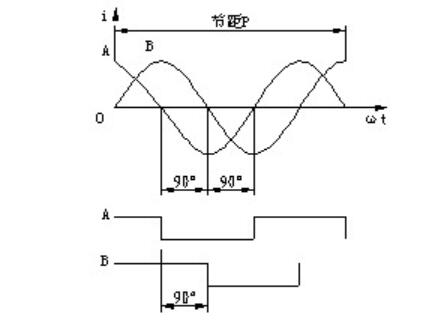
旋轉編碼器是用來測量轉速的裝置。它分為單路輸出和雙路輸出兩種。技術參數主要有每轉脈沖數(幾十個到幾千個都有),和供電電壓等。單路輸出是指旋轉編碼器的輸出是一組脈沖,而雙路輸出的旋轉編碼器輸出兩組相位差90度的脈沖,通過這兩組脈沖不僅可以測量轉速,還可以判斷旋轉的方向。
增量型編碼器與絕對型編碼器的區分
編碼器如以信號原理來分,有增量型編碼器,絕對型編碼器。
增量型編碼器 (旋轉型)
工作原理:
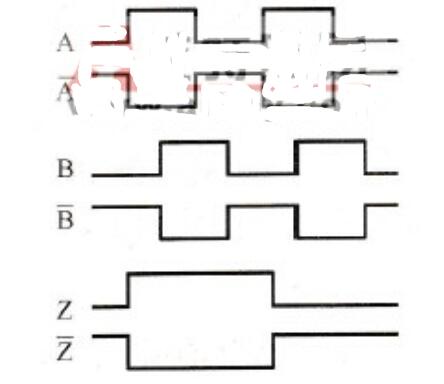
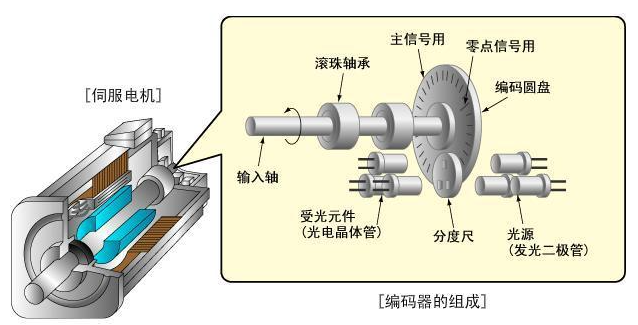
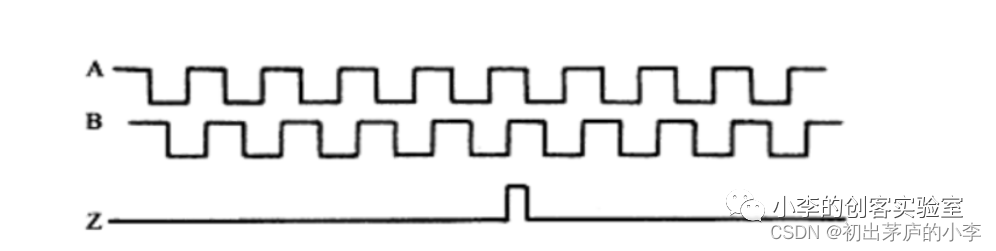
由一個中心有軸的光電碼盤,其上有環形通、暗的刻線,有光電發射和接收器件讀取,獲得四組正弦波信號組合成A、B、C、D,每個正弦波相差90度相位差(相對于一個周波為360度),將C、D信號反向,疊加在A、B兩相上,可增強穩定信號;另每轉輸出一個Z相脈沖以代表零位參考位。
由于A、B兩相相差90度,可通過比較A相在前還是B相在前,以判別編碼器的正轉與反轉,通過零位脈沖,可獲得編碼器的零位參考位。
編碼器碼盤的材料有玻璃、金屬、塑料,玻璃碼盤是在玻璃上沉積很薄的刻線,其熱穩定性好,精度高,金屬碼盤直接以通和不通刻線,不易碎,但由于金屬有一定的厚度,精度就有限制,其熱穩定性就要比玻璃的差一個數量級,塑料碼盤是經濟型的,其成本低,但精度、熱穩定性、壽命均要差一些。
分辨率—編碼器以每旋轉360度提供多少的通或暗刻線稱為分辨率,也稱解析分度、或直接稱多少線,一般在每轉分度5~10000線。
信號輸出:
信號輸出有正弦波(電流或電壓),方波(TTL、HTL),集電極開路(PNP、NPN),推拉式多種形式,其中TTL為長線差分驅動(對稱A,A-;B,B-;Z,Z-),HTL也稱推拉式、推挽式輸出,編碼器的信號接收設備接口應與編碼器對應。
信號連接—編碼器的脈沖信號一般連接計數器、PLC、計算機,PLC和計算機連接的模塊有低速模塊與高速模塊之分,開關頻率有低有高。
如單相聯接,用于單方向計數,單方向測速。
A.B兩相聯接,用于正反向計數、判斷正反向和測速。
A、B、Z三相聯接,用于帶參考位修正的位置測量。
A、A-,B、B-,Z、Z-連接,由于帶有對稱負信號的連接,電流對于電纜貢獻的電磁場為0,衰減最小,抗干擾最佳,可傳輸較遠的距離。
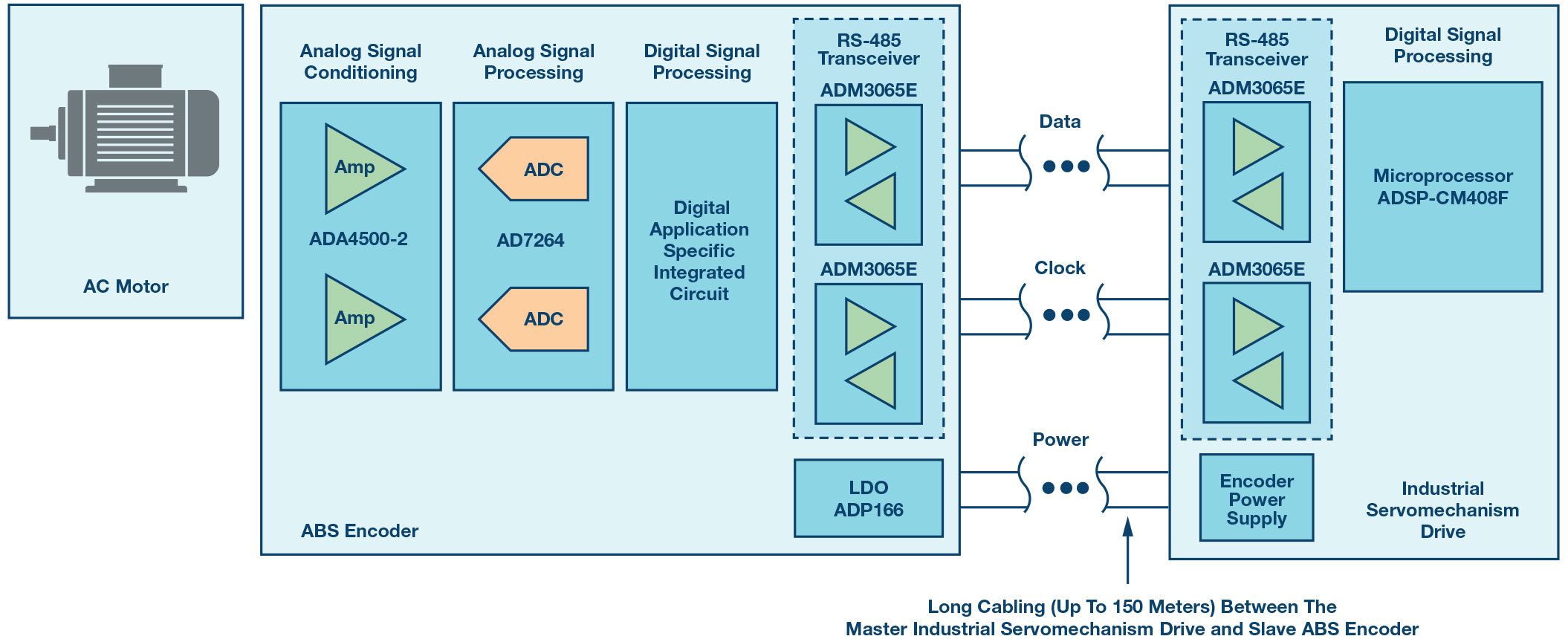
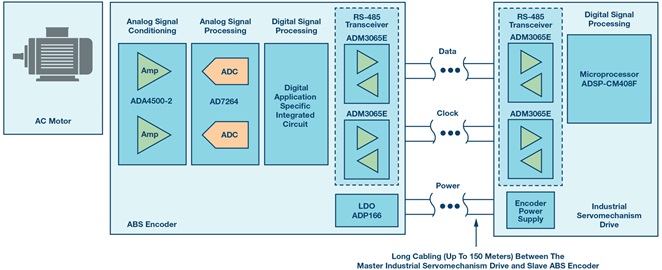
對于TTL的帶有對稱負信號輸出的編碼器,信號傳輸距離可達150米。
對于HTL的帶有對稱負信號輸出的編碼器,信號傳輸距離可達300米。
?電話:021-61476043-605? 傳真:021-61476045 聯系人:張玉考 手機:15801964865 QQ :623496487
編碼器的定義與功能:
在數字系統里,常常需要將某一信息(輸入)變換為某一特定的代碼(輸出)。把二進制碼按一定的規律編排,例如8421碼、格雷碼等,使每組代碼具有一特定的含義(代表某個數字或控制信號)稱為編碼。具有編碼功能的邏輯電路稱為編碼器。編碼器有若干個輸入,在某一時刻只有一個輸入信號被轉換成為二進制碼。如果一個編碼器有N個輸入端和n個輸出端,則輸出端與輸入端之間應滿足關系N≤2n。 例如8線—3線編碼器和10線—4線編碼器分別有8輸入、3位二進制碼輸出和10輸入、4位二進制碼輸出。
1.4線—2線編碼器
下面分析4輸入、2位二進制輸出的編碼器的工作原理。4線—2線編碼器的功能如表5.2.1所示。

根據邏輯表達式畫出邏輯圖如圖5.2.1所示。該邏輯電路可以實現如表5.2.1所示的功能,即當I0~I3中某一個輸入為1,輸出 Y1Y0即為相對應的代碼,例如當I1為1時,Y1Y0為01。這里還有一個問題請讀者注意。當I0為1,I1~I3都為0和I0~I3均為0時Y1Y0 都是00,而這兩種情況在實際中是必須加以區分的,這個問題留待后面加以解決。當然,編碼器也可以設計為低電平有效。

2.鍵盤輸入8421BCD碼編碼器:
計算機的鍵盤輸入邏輯電路就是由編碼器組成。圖5.2.2是用十個按鍵和門電路組成的8421碼編碼器,其功能如表5.2.2所示, 其中S0~S9代表十個按鍵,即對應十進制數0~9的輸入鍵,它們對應的輸出代碼正好是8421BCD碼,同時也把它們作為邏輯變量,ABCD 為輸出代碼(A為最高位),GS為控制使能標志。
對功能表和邏輯電路進行分析,都可得知:①該編碼器為輸入低電平有效;②在按下S0~S9中任意一個鍵時,即輸入信號中有一個為有效電平時,GS=1,代表有信號輸入,而只有S0~S9均為高電平時GS=0,代表無信號輸入,此時的輸出代碼0000為無效代碼。由此解決了前面提出的如何區分兩種情況下輸出都是全0的問題。


綜上所述,對編碼器歸納為以下幾點:
1.編碼器的輸入端子數N(要進行編碼的信息的個數)與輸出端子數n(所得編碼的位數)之間應滿足關系式N≤2n。
2.編碼器的每個輸入端都代表一個二進制數、十進制數或其它信息符號,而且在N個輸入端中每次只允許有一個輸入端輸入信號(輸入低電平有效或輸入高電平有效),輸出為相應的二進制代碼或二-十進制代碼(BCD碼)。
3.正確使用編碼器的控制端,可以用來擴展編碼器的功能。電話:021-61476043-605? 傳真:021-61476045 聯系人:張玉考 手機:15801964865 QQ :623496487
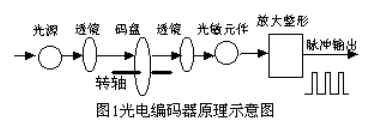
一、光電編碼器的工作原理
光電編碼器,是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳感器。這是目
前應用最多的傳感器,光電編碼器是由光柵盤和光電檢測裝置組成。光柵盤是在一定直徑的圓板上等分
地開通若干個長方形孔。由于光電碼盤與電動機同軸,電動機旋轉時,光柵盤與電動機同速旋轉,經發
光二極管等電子元件組成的檢測裝置檢測輸出若干脈沖信號,其原理示意圖如圖1所示;通過計算每秒光
電編碼器輸出脈沖的個數就能反映當前電動機的轉速。此外,為判斷旋轉方向,碼盤還可提供相位相差
90o的兩路脈沖信號。
根據檢測原理,編碼器可分為光學式、磁式、感應式和電容式。根據其刻度方法及信號輸出形式,可分
為增量式、絕對式以及混合式三種。
(一)增量式編碼器
增量式編碼器是直接利用光電轉換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90o,從而可
方便地判斷出旋轉方向,而Z相為每轉一個脈沖,用于基準點定位。它的優點是原理構造簡單,機械平均
壽命可在幾萬小時以上,抗干擾能力強,可靠性高,適合于長距離傳輸。其缺點是無法輸出軸轉動的絕
對位置信息。
(二)絕對式編碼器
絕對編碼器是直接輸出數字量的傳感器,在它的圓形碼盤上沿徑向有若干同心碼道,每條道上由透光和
不透光的扇形區相間組成,相鄰碼道的扇區數目是雙倍關系,碼盤上的碼道數就是它的二進制數碼的位
數,在碼盤的一側是光源,另一側對應每一碼道有一光敏元件;當碼盤處于不同位置時,各光敏元件根
據受光照與否轉換出相應的電平信號,形成二進制數。這種編碼器的特點是不要計數器,在轉軸的任意
位置都可讀出一個固定的與位置相對應的數字碼。顯然,碼道越多,分辨率就越高,對于一個具有 N位
二進制分辨率的編碼器,其碼盤必須有N條碼道。目前國內已有16位的絕對編碼器產品。
絕對式編碼器是利用自然二進制或循環二進制(葛萊碼)方式進行光電轉換的。絕對式編碼器與增量式
編碼器不同之處在于圓盤上透光、不透光的線條圖形,絕對編碼器可有若干編碼,根據讀出碼盤上的編
碼,檢測絕對位置。編碼的設計可采用二進制碼、循環碼、二進制補碼等。它的特點是:
1.可以直接讀出角度坐標的絕對值;
2.沒有累積誤差;
3.電源切除后位置信息不會丟失。但是分辨率是由二進制的位數來決定的,也就是說精度取決于位數,
目前有10位、14位等多種。
(三)混合式絕對值編碼器
混合式絕對值編碼器,它輸出兩組信息:一組信息用于檢測磁極位置,帶有絕對信息功能;另一組則完
全同增量式編碼器的輸出信息。
光電編碼器是一種角度(角速度)檢測裝置,它將輸入給軸的角度量,利用光電轉換原理 轉換成相應的
電脈沖或數字量,具有體積小,精度高,工作可靠,接口數字化等優點。它廣泛應用于數控機床、回轉臺
、伺服傳動、機器人、雷達、軍事目標測定等需要檢測角度的裝置和設備中。
二、光電編碼器的應用電路
(一)EPC-755A光電編碼器的應用
EPC-755A光電編碼器具備良好的使用性能,在角度測量、位移測量時抗干擾能力很強,并具有穩定可靠
的輸出脈沖信號,且該脈沖信號經計數后可得到被測量的數字信號。因此,我們在研制汽車駕駛模擬器
時,對方向盤旋轉角度的測量選用EPC-755A光電編碼器作為傳感器,其輸出電路選用集電極開路型,輸
出分辨率選用360個脈沖/圈,考慮到汽車方向盤轉動是雙向的,既可順時針旋轉,也可逆時針旋轉,需
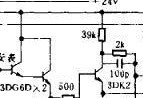
要對編碼器的輸出信號鑒相后才能計數。圖2給出了光電編碼器實際使用的鑒相與雙向計數電路,鑒相電
路用1個D觸發器和2個與非門組成,計數電路用3片74LS193組成
當光電編碼器順時針旋轉時,通道A輸出波形超前通道B輸出波形90°,D觸發器輸出Q(波形W1)為高電
平,Q(波形W2)為低電平,上面與非門打開,計數脈沖通過(波形W3),送至雙向計數器74LS193的加
脈沖輸入端CU,進行加法計數;此時,下面與非門關閉,其輸出為高電平(波形W4)。當光電編碼器逆
時針旋轉時,通道A輸出波形比通道B輸出波形延遲90°,D觸發器輸出Q(波形W1)為低電平,Q(波形W2
)為高電平,上面與非門關閉,其輸出為高電平(波形W3);此時,下面與非門打開,計數脈沖通過(
波形W4),送至雙向計數器74LS193的減脈沖輸入端CD,進行減法計數。
汽車方向盤順時針和逆時針旋轉時,其最大旋轉角度均為兩圈半,選用分辨率為360個脈沖/圈的編碼器
,其最大輸出脈沖數為900個;實際使用的計數電路用3片74LS193組成,在系統上電初始化時,先對其進
行復位(CLR信號),再將其初值設為800H,即2048(LD信號);如此,當方向盤順時針旋轉時,計數電
路的輸出范圍為2048~2948,當方向盤逆時針旋轉時,計數電路的輸出范圍為2048~1148;計數電路的
數據輸出D0~D11送至數據處理電路。
實際使用時,方向盤頻繁地進行順時針和逆時針轉動,由于存在量化誤差,工作較長一段時間后,方向
盤回中時計數電路輸出可能不是2048,而是有幾個字的偏差;為解決這一問題,我們增加了一個方向盤
回中檢測電路,系統工作后,數據處理電路在模擬器處于非操作狀態時,系統檢測回中檢測電路,若方
向盤處于回中狀態,而計數電路的數據輸出不是2048,可對計數電路進行復位,并重新設置初值。
(二)光電編碼器在重力測量儀中的應用
采用旋轉式光電編碼器,把它的轉軸與重力測量儀中補償旋鈕軸相連。重力測量儀中補償旋鈕的角位移
量轉化為某種電信號量;旋轉式光電編碼器分兩種,絕對編碼器和增量編碼器。
增量編碼器是以脈沖形式輸出的傳感器,其碼盤比絕對編碼器碼盤要簡單得多且分辨率更高 。一般只需
要三條碼道,這里的碼道實際上已不具有絕對編碼器碼道的意義,而是產生計數脈沖。它的碼盤的外道
和中間道有數目相同均勻分布的透光和不透光的扇形區(光柵),但是兩道扇區相互錯開半個區。當碼
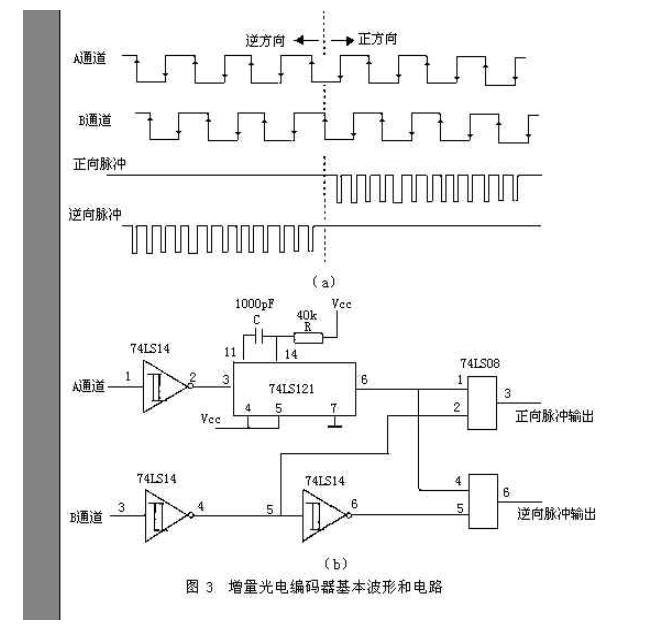
盤轉動時,它的輸出信號是相位差為90°的A相和B相脈沖 信號以及只有一條透光狹縫的第三碼道所產生
的脈沖信號(它作為碼盤的基準位置,給計數系統提供一個初始的零位信號)。從A,B兩個輸出信號的
相位關系(超前或滯后)可判斷旋轉的方向。當碼盤正轉時,A道脈沖波形比B道超前π/2,而反轉時 ,
A道脈沖比B道滯后π/2。是一實際電路,用A道整形波的下沿觸發單穩態 產生的正脈沖與B道整形波相‘
與’,當碼盤正轉時只有正向口脈沖輸出,反之,只有逆向口脈沖輸出。因此,增量編碼器是根據輸出
脈沖源和脈沖計數來確定碼盤的轉動方向和相對角位移量。通常,若編碼器有N個(碼道)輸出信號,其
相位差為π/ N,可計數脈沖為2N倍光柵數,現在N=2。電路的缺點是有時會產生誤記脈沖造成誤差, 這
種情況出現在當某一道信號處于“高”或“低”電平狀態,而另一道信號正處于“高”和 “低”之間的
往返變化狀態,此時碼盤雖然未產生位移,但是會產生單方向的輸出脈沖。例如,碼盤發生抖動或手動
對準位置時(下面可以看到,在重力儀測量時就會有這種情況)。
?
是一個既能防止誤脈沖又能提高分辨率的四倍頻細分電路。在這里,采用了有記憶功能的D型觸發器和時
鐘發生電路。每一道有兩個D觸發器串接,這樣,在時鐘脈 沖的間隔中,兩個Q端(如對應B道的74LS175
的第2、7引腳)保持前兩個時鐘期的輸入 狀態,若兩者相同,則表示時鐘間隔中無變化;否則,可以根
據兩者關系判斷出它的變化方 向,從而產生‘正向’或‘反向’輸出脈沖。當某道由于振動在‘高’、
‘低’間往復變化 時,將交替產生‘正向’和‘反向’脈沖,這在對兩個計數器取代數和時就可消除它
們的影響(下面儀器的讀數也將涉及這點)。由此可見,時鐘發生器的頻率應大于振動頻率的可能 最大
值。由圖4還可看出,在原一個脈沖信號的周期內,得到了四個計數脈沖。例如,原每圈脈沖數為1000的
編碼器可產生4倍頻的脈沖數是4000個,其分辨率為0.09°。實際上 ,目前這類傳感器產品都將光敏元
件輸出信號的放大整形等電路與傳感檢測元件封裝在一起,所以只要加上細分與計數電路就可以組成一
個角位移測量系統(74159是4-16譯碼器)。
三、應用中問題分析及改進措施
(一)應用中問題分析
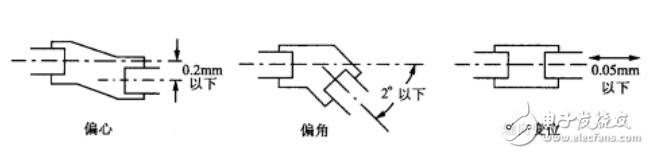
光電檢測裝置的發射和接收裝置都安裝在生產現場,在使用中暴露出許多缺陷,其有內在因素也有外在
因素,主要表現在以下幾個方面:1.發射裝置或接受裝置因機械震動等原因而引起的移位或偏移,導致
接收裝置不能可靠的接收到光信號,而不能產生電信號。例如;光電編碼器應用在軋鋼調速系統中,因
光電編碼器是直接用螺栓固定在電動機的外殼上,光電編碼器的軸通過較硬的彈簧片和電動機轉軸相連
接,因電動機所帶負載是沖擊性負載,當軋機過鋼時會引起電動機轉軸和外殼的振動。經測定;過鋼時
光電編碼器振動速度為2.6mm/s,這樣的振動速度會損壞光電編碼器的內部功能。造成誤發脈沖,從而導
致控制系統不穩定或誤動作,導致事故發生。
2.因光電檢測裝置安裝在生產現場,受生產現場環境因素影響導致光電檢測裝置不能可靠的工作。如安
裝部位溫度高、濕度大,導致光電檢測裝置內部的電子元件特性改變或損壞。例如在連鑄機送引錠跟蹤
系統,由于光電檢測裝置安裝的位置靠近鑄坯,環境溫度高而導致光電檢測裝置誤發出信號或損壞,而
引發生產或人身事故。
3.生產現場的各種電磁干擾源,對光電檢測裝置產生的干擾,導致光電檢測裝置輸出波形發生畸變失真
,使系統誤動或引發生產事故。例如;光電檢測裝置安裝在生產設備本體,其信號經電纜傳輸至控制系
統的距離一般在20m~100m,傳輸電纜雖然一般都選用多芯屏蔽電纜,但由于電纜的導線電阻及線間電容
的影響再加上和其他電纜同在一起敷設,極易受到各種電磁干擾的影響,因此引起波形失真,從而使反
饋到調速系統的信號與實際值的偏差,而導致系統精度下降。
(二)改進措施
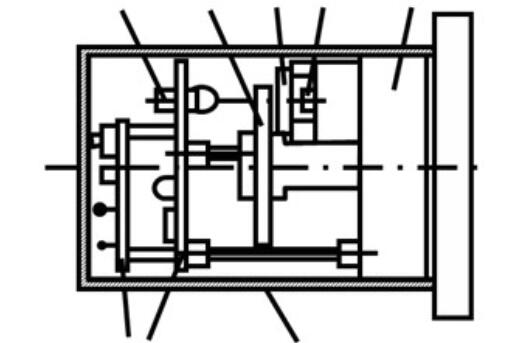
1.改變光電編碼器的安裝方式。光電編碼器不在安裝在電動機外殼上,而是在電動機的基礎上制作一固
定支架來獨立安裝光電編碼器,光電編碼器軸與電動機軸中心必須處于同一水平高度,兩軸采用軟橡膠
或尼龍軟管相連接,以減輕電動機沖擊負載對光電編碼器的機械沖擊。采用此方式后經測振儀檢測,其
振動速度降至1.2mm/s。
2.合理選擇光電檢測裝置輸出信號傳輸介質,采用雙絞屏蔽電纜取代普通屏蔽電纜。雙絞屏蔽電纜具有
兩個重要的技術特性,一是對電纜受到的電磁干擾具有較強的防護能力,因為空間電磁場在線上產生的
干擾電流可以互相抵消。雙絞屏蔽電纜的另一個技術特點是互絞后兩線間距很小,兩線對干擾線路的距
離基本相等,兩線對屏蔽網的分布電容也基本相同,這對抑制共模干擾效果更加明顯。
3.利用PLC軟件監控或干涉。在連鑄生產的送引錠過程要求光電檢測裝置產生有時序性的電信號,同時
,該信號與整個過程不同階段相對應。如圖5。
?
(1)送引錠過程啟動前,光電信號1為“1”。(2)送引錠過程啟動后,在A階段,輥道啟動,引錠桿上
送。當引錠桿擋住光電裝置發射出的紅外光時,光電信號為“0”;當紅外光透過引錠桿中部2個小圓孔
時,光電裝置發出信號2和3,均為“1”。(3)送引錠過程在B階段,光電信號為“0”,輥道停下,引
錠桿暫停上送,扇形10段壓下,啟動拉矯機和“同步1”,引錠桿繼續上送。(4)送引錠過程在C階段,
引錠桿上送,并不再擋住紅外光,光電信號4為“1”,啟動“同步2”,停下“同步1”,引錠桿繼續上
送。至此光電裝置工作過程結束。根據光檢測電裝置的工作過程,只要現場測定送引錠過程中各個光電
信號發生的時間,結合送引錠過程與光電信號的關系,利用PLC應用程序中的相關數據,編制符合要求的
PLC程序,將PLC程序輸出信號輸入至PLC的輸入模塊,替代原光電信號的輸入信號。其程序框圖如圖6所
示。
什么叫光電編碼器
????? 光電編碼器是通過讀取光電編碼盤上的圖案或編碼信息來表示與光電編碼器相連的電機轉子的位置信息的。根據光電編碼器的工作原理可以將光電編碼器分為絕對式光電編碼器與增量式光電編碼器,下面簡單介紹下下絕對式光電編碼器的的結構與工作原理做介紹。
絕對式光電編碼器的結構與工作原理
絕對式光電編碼器如圖所示,他是通過讀取編碼盤上的二進制的編碼信息來表示絕對位置信息的。
編碼盤是按照一定的編碼形式制成的圓盤。圖1是二進制的編碼盤,圖中空白部分是透光的,用“0”來表示;涂黑的部分是不透光的,用“1”來表示。通常將組成編碼的圈稱為碼道,每個碼道表示二進制數的一位,其中最外側的是最低位,最里側的是最高位。如果編碼盤有4個碼道,則由里向外的碼道分別表示為二進制的23、22、21和20,4位二進制可形成16個二進制數,因此就將圓盤劃分16個扇區,每個扇區對應一個4位二進制數,如0000、0001、…、1111。
圖1
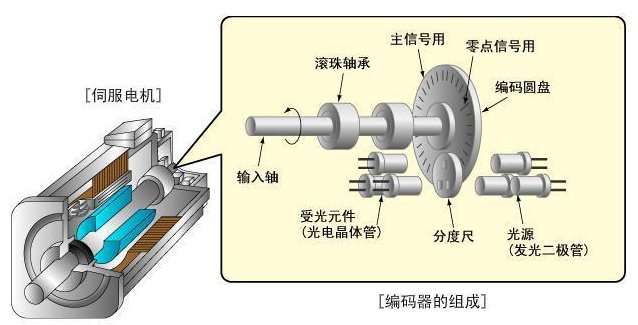
按照碼盤上形成的碼道配置相應的光電傳感器,包括光源、透鏡、碼盤、光敏二極管和驅動電子線路。當碼盤轉到一定的角度時,扇區中透光的碼道對應的光敏二極管導通,輸出低電平“0”,遮光的碼道對應的光敏二極管不導通,輸出高電平“1”,這樣形成與編碼方式一致的高、低電平輸出,從而獲得扇區的位置腳。
光電編碼器原理
光電編碼器,是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳感器,是目前應用最多的傳感器。一般的光電編碼器主要由光柵盤和光電檢測裝置組成。在伺服系統中,由于光電碼盤與電動機同軸,電動機旋轉時,光柵盤與電動機同速旋轉.經發光二極管等電子元件組成的檢測裝置檢測輸出若干脈沖信號,其原理如圖所示。通過計算每秒光電編碼器輸出脈沖的個數就能反映當前電動機的轉速。此外,為判斷旋轉方向,碼盤還可提供相位相差90°的2個通道的光碼輸出,根據雙通道光碼的狀態變化確定電機的轉向。根據檢測原理,編碼器可分為光學式、磁式、感應式和電容式。根據其刻度方法及信號輸出形式,可分為增量式、絕對式以及混合式3種。
編碼器原理
光電編碼器,是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳感器。這是目前應用最多的傳感器,光電編碼器是由光柵盤和光電檢測裝置組成。光柵盤是在一定直徑的圓板上等分地開通若干個長方形孔。由于光電碼盤與電動機同軸,電動機旋轉時,光柵盤與電動機同速旋轉,經發光二極管等電子元件組成的檢測裝置檢測輸出若干脈沖信號,其原理示意圖如圖1所示;通過計算每秒光電編碼器輸出脈沖的個數就能反映當前電動機的轉速。
1.1增量式編碼器
增量式編碼器是直接利用光電轉換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90海傭煞獎愕嘏卸銑魴較潁鳽相為每轉一個脈沖,用于基準點定位。它的優點是原理構造簡單,機械平均壽命可在幾萬小時以上,抗干擾能力強,可靠性高,適合于長距離傳輸。其缺點是無法輸出軸轉動的絕對位置信息。
1.2絕對式編碼器
絕對編碼器是直接輸出數字量的傳感器,在它的圓形碼盤上沿徑向有若干同心碼道,每條道上由透光和不透光的扇形區相間組成,相鄰碼道的扇區數目是雙倍關系,碼盤上的碼道數就是它的二進制數碼的位數,在碼盤的一側是光源,另一側對應每一碼道有一光敏元件;當碼盤處于不同位置時,各光敏元件根據受光照與否轉換出相應的電平信號,形成二進制數。這種編碼器的特點是不要計數器,在轉軸的任意位置都可讀出一個固定的與位置相對應的數字碼。顯然,碼道越多,分辨率就越高,對于一個具有 N位二進制分辨率的編碼器,其碼盤必須有N條碼道。目前國內已有16位的絕對編碼器產品。
絕對式編碼器是利用自然二進制或循環二進制(葛萊碼)方式進行光電轉換的。絕對式編碼器與增量式編碼器不同之處在于圓盤上透光、不透光的線條圖形,絕對編碼器可有若干編碼,根據讀出碼盤上的編碼,檢測絕對位置。編碼的設計可采用二進制碼、循環碼、二進制補碼等。它的特點是:
1.2.1可以直接讀出角度坐標的絕對值;
1.2.2沒有累積誤差;
1.2.3電源切除后位置信息不會丟失。但是分辨率是由二進制的位數來決定的,也就是說精度取決于位數,目前有10位、14位等多種。電話:021-61476043-605? 傳真:021-61476045 聯系人:張玉考 手機:15801964865 QQ :623496487
1.3混合式絕對值編碼器
混合式絕對值編碼器,它輸出兩組信息:一組信息用于檢測磁極位置,帶有絕對信息功能;另一組則完全同增量式編碼器的輸出信息。
光電編碼器是一種角度(角速度)檢測裝置,它將輸入給軸的角度量,利用光電轉換原理轉換成相應的電脈沖或數字量,具有體積小,精度高,工作可靠,接口數字化等優點。它廣泛應用于數控機床、回轉臺、伺服傳動、機器人、雷達、軍事目標測定等需要檢測角度的裝置和設備中。
更多編碼器知識請訪問http://www.1cnz.cn/zhuanti/20111111242149.html
?
?























 工商網監
工商網監
評論