 電子發燒友App
電子發燒友App


作者:謝桂輝,鄭旭初,趙天明,劉子緒,趙 娟
引言
鎖相放大器是一種用于測量動態信號的電子儀器,它的功能是從被噪聲淹沒的信號中測出某一頻率的信號的相位和幅值。利用參考信號與被測信號的互相關特性,提取出與參考信號同頻率和同相位的被測信號。相較于采用窄帶濾波進行微弱信號檢測,鎖相放大器因采用相關檢測技術,其Q值遠高于模擬帶通濾波器,且不存在中心頻率不穩定的問題。由于參考信號與待測信號具有相關性,而與噪聲不具有相關性,使通過相敏檢測提取的信號中僅包含待測信號的幅度和相位信息,因而在微弱信號的高精度測量領域具有極大的應用價值。
數字鎖相放大器因其具有動態范圍大、測量誤差小、不受運放溫漂和直流偏置影響的優勢,近年來逐漸取代了模擬鎖相放大器,但常見的數字鎖相放大器價格昂貴且不便于攜帶,不易于在特殊環境使用。
針對上述問題,本文研制了一款低成本的、可測試幅度最低達100 nV的便攜式數字鎖相放大器,適用于深海、野外等特殊環境的微弱信號檢測。
1 系統方案論證
1.1 數字鎖相放大器的原理論證
本款數字鎖相放大器基于數字鎖相環的原理,原理圖如圖1所示。
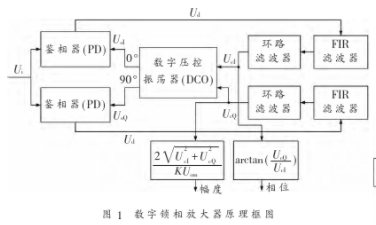
記待測信號為Ui(t),數字壓控振蕩器(Digital Control Oscillator,DCO)產生的一對正交信號分別為I路UoI(t)與Q路UoQ(t),如式(1)所示。
1.2 系統方案論證
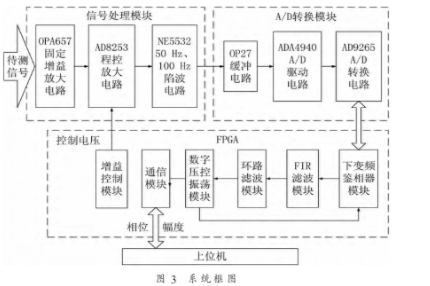
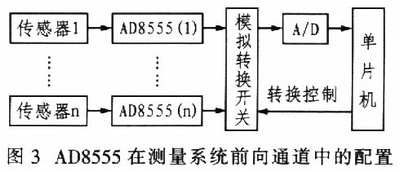
本系統以FPGA為核心,主要由信號處理模塊、A/D轉換模塊和數字鎖相放大模塊構成。鑒于待測信號為納伏級微弱信號,設計可變增益放大電路對待測信號進行放大,將待測信號處理為合適的幅度供ADC采樣,由高速ADC采集后輸入至FPGA測量,將測量得到的I/Q路數據通過串口通信傳輸到上位機,由上位機計算I/Q路數據,得到待測信號的實時頻率和相位并進行顯示。系統框圖如圖3所示。
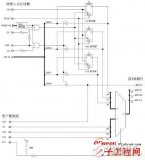
2.1 信號處理模塊
信號處理模塊負責對待測信號進行處理以便于ADC采樣。該模塊由前級固定增益放大電路、中間級程控放大電路和末級工頻濾波電路構成。
前級固定增益電路采用寬帶低噪運算放大器OPA657。該芯片的帶寬增益積達1.6 GHz,在90 MHz以下具有0.1 dB的增益平坦度,輸入電壓噪聲4.8 nV/
。設計本級固定增益為60 dB,允許輸入信號頻率最大值為100 kHz、最大幅度為1 μV,實際需求的帶寬增益積為:GBW=G×f=1 000×100 kHz=100 MHz,芯片滿足設計要求。
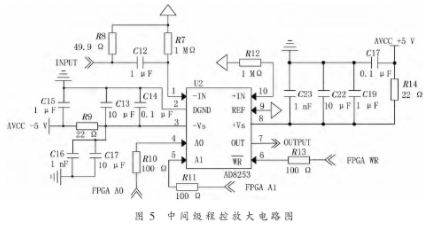
中間級程控放大電路采用數控增益儀表放大器AD8253。該芯片的增益分為4檔,可根據2位增益控制字調節,在增益為40 dB時,-3 dB帶寬為550 kHz,考慮到前級允許輸入的信號最大頻率為100 kHz,故設計芯片增益倍數最高為40 dB。設計本級允許輸出信號最大幅度為1 V,所需壓擺率為:SR=2πfV=2π×0.1 MHz×1 V≈0.628 V/μs,該芯片的壓擺率為20 V/μs,滿足設計要求。
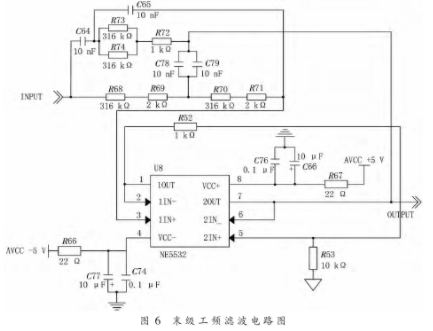
末級工頻濾波電路采用低噪運算放大器NE5532。該芯片的輸入電壓噪聲小于5 nV/
,壓擺率為9 V/μs,本級允許的輸入信號最大頻率為100 kHz、最大幅度為1 V,所需壓擺率為0.628 V/μs,滿足系統對壓擺率的要求。為避免工頻干擾,本級設計兩級帶阻濾波器電路,分別將50 Hz與100 Hz作為中心頻率,更好地濾除工頻噪聲。
本模塊設計的增益范圍為60/80/100 dB三檔,輸入電壓噪聲9 nV/
,上述電路如圖4~圖6所示。

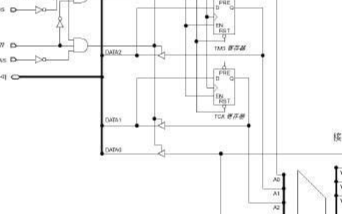
2.2 模數轉換模塊
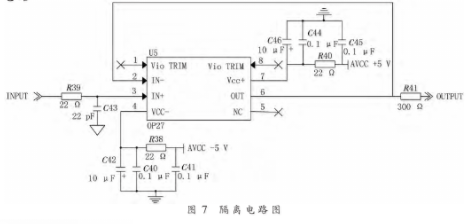
模數轉換(以下簡稱A/D轉換)模塊負責將放大后的待測信號從模擬量轉化為數字量,該模塊由隔離電路、模數轉換驅動電路(以下簡稱ADC驅動電路)和模數轉換電路(以下簡稱ADC電路)構成。
隔離電路采用低噪運算放大器OP27。考慮到將模擬量的待測信號不加緩沖的輸入A/D轉換模塊,易引起數字信號對模擬信號的干擾,導致信號畸變,故設計該電路以隔離模擬信號與數字信號的影響。
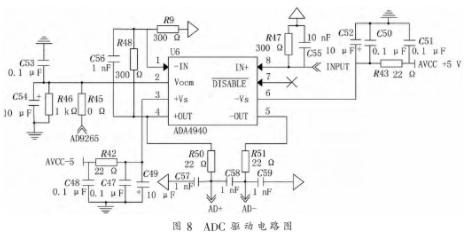
ADC驅動電路采用低功耗、低失真的差分ADC驅動器ADA4940。對于后級的差分輸入ADC而言,差分輸入的信號能夠最大程度地發揮ADC的共模抑制性能,改善信噪比,因此設計該電路以將單端信號轉化為差分信號。
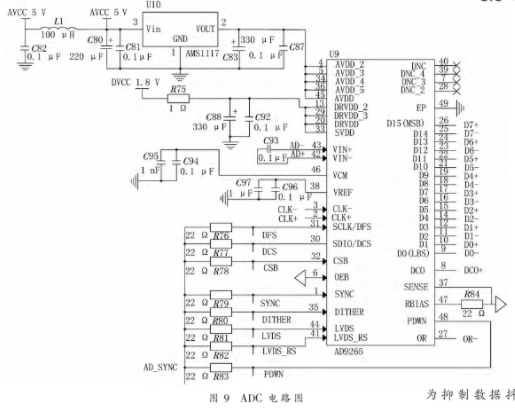
ADC電路采用高速模數轉換器AD9265,該芯片具有16 bit的采樣精度與125 MS/s的采樣率,設計其對待測信號每個周期采樣1 024個點,則芯片能夠對小于122 kHz的信號進行采樣,高于系統允許的最大待測信號頻率。
本模塊將模擬信號低失真的轉化為數字信號并傳輸到FPGA以便于數字鎖相放大,電路圖如圖7~圖9所示。
3 系統軟件設計
系統的軟件部分包括下變頻鑒相器模塊、環路濾波模塊、數字壓控振蕩模塊、通信模塊和上位機模塊。其中,數字壓控振蕩模塊產生正交的雙路信號,與待測信號一同輸入下變頻鑒相器和環路濾波器進行處理,輸出結果作為數字壓控振蕩器的控制信號調整其輸出信號頻率和相位,3個模塊構成數字鎖相環部分。通信模塊完成FPGA與上位機的數據通信。上位機模塊負責處理通信模塊上傳的數據,使測試結果更簡潔直觀,程序運行流暢,界面友好。
3.1 下變頻鑒相模塊
下變頻鑒相器是用于比較輸入信號與壓控振蕩器輸出信號的相位,它的輸出電壓是對應于輸入信號相位差的函數。
該模塊將待測信號分別與一對正交信號進行混頻,兩路混頻后的信號中都含有一對和頻分量與差頻分量,經過后級濾波器處理后得到所需差頻分量,當數字鎖相環進入相位鎖定狀態時,該信號用于計算,以得到待測信號的幅度與相位信息。
3.2 FIR濾波模塊
FIR濾波模塊采用一階滯后濾波算法,一階滯后濾波的結果受本次采樣值與上次濾波輸出值影響,使輸出對輸入有反饋作用,其公式見式(7):
本次采樣值和上次濾波輸出值對本次輸出采樣值的影響程度由濾波系數決定,濾波系數越小,濾波平穩度越高;濾波系數越大,濾波靈敏度越高。
為使算法在數據變化較快時具有較高的靈敏度,在數據變化較慢時具有較高的平穩度,增加濾波系數自適應算法:判斷本次數據變化與上次數據變化是否同向,若為反向,認為采樣數據出現抖動,將濾波系數還原為初始值;若為同向,判斷數據變化量是否超過設定值,若沒有超過設定值,認為數據變化較慢,濾波系數調整步長選擇低檔,反之,認為數據變化較快,濾波系數調整步長選擇高檔。
3.3 數字壓控振蕩模塊
當沒有控制信號輸入時,數字壓控振蕩器的輸出信號為設定的初始振蕩信號和它的正交信號。以初始震蕩信號為例,該信號與待測信號經鑒相器與環路濾波器處理后得到數字壓控振蕩器的頻率控制信號,振蕩信號的頻率與頻率控制信號的幅度正相關,隨著振蕩信號頻率的調整,振蕩信號與待測信號的差頻將趨于0,使頻率控制信號趨于直流信號,振蕩信號的頻率和相位隨之穩定,使鎖相環進入相位鎖定狀態。
3.4 上位機模塊
本系統選擇LabVIEW作為上位機的開發環境。上位機的主要功能包括放大器增益設置、輸出信號模式設置、解調頻率設置、內外參考設置、測量結果顯示等。
為抑制數據抖動和可能出現的部分極值對測量結果產生的影響,兼顧數據處理的實時性,采用了如下算法:對最近的M個測量數據取平均作為實際測量值顯示。在此基礎上,增加對異常數據的檢測,若異常數據非連續出現,則剔除異常數據,當連續出現N個異常數據時,認為輸入信號已被更新,重新計算均值作為新的信號測量結果。M值影響數據更新的速度和數據的穩定性,N值影響數據更新的靈敏度,使其能在輸入信號改變后及時響應,不再依賴上一個信號的平均值,L值影響極值的有效識別。本系統選擇M值為10,N值為3,L值為當前平均值的25%。
上位機具有一鍵復制功能,可以將接收的數據按序復制,便于用于其他處理。并且可以對波形的局部進行縮放操作,易于觀察波形細節。上位機整體界面友好,顯示直觀,便于使用者操作,上位機界面如圖10所示。
4 測試數據及分析
4.1 系統整體噪聲測試
測試條件:使用傅里葉頻譜分析儀SR760進行測試。
測試方法:在不接入待測信號的條件下將系統輸出噪聲進行2 000倍放大并測試。
測試結果:實際系統噪聲峰值Vtop約為17.8 μVrms/
,如圖11所示。
4.2 系統鎖相精度測試
測試條件:使用160 MHz的RIGOL數字信號源、100 MHz的Tektronix數字存儲示波器和自制100 dB衰減網絡。
測試方法:將經100 dB衰減網絡處理后的信號源信號作為待測信號,分級測量系統對于小信號和大信號的測量能力。











 工商網監
工商網監
評論