 電子發燒友App
電子發燒友App


在工業領域中經常要用到低頻數字式相位儀來精確測量兩信號之問的相位差,比如在電力系統、頻率特性的研究、激光測距等領域均有廣泛的應用,相位檢測的精度直接決定系統的整體性能。這就要求測量儀逐漸向智能化和測試自動化方向發展,本設計采用MCU和FPGA相結合的系統方案,以AVR單片機ATmega128和Altera公司的Cyclone系列EP1C3T100為核心,充分發揮各自的優勢,如AVR單片機先進的RISC結構和強勁的運算、控制功能,Altera公司的FPGA運算速度快、資源豐富以及易編程的特點,合理設計,此方案的相位儀具備速度快、穩定可靠、精度高等優點,而且容易實現“智能化”和“自動化”。
1 系統方案設計
1.1 測量方法的比較與選擇
目前相位測量的方法主要有兩種:
1)DFT測相法即將待測信號通過A/D轉換得到f(n),f(n)按離散傅里葉變換得出離散頻譜F(k),f(n)和F(k)為傅里葉變換對,通過運算得到兩路信號的基波相位,從而計算出相位差。DFT測相法的精度受限于ADC的采樣精度,需要高速ADC對信號進行過采樣,測量方案復雜,可以通過采集卡在計算機上實現虛擬儀器,所以主要應用在精度要求很高的場合和虛擬儀器中。
2)填充計數測相法 即兩路同頻的正弦信號經過信號整形電路后得到方波信號,方波信號經過鑒相器后,得到兩路輸入信號的相位差信號,用固定頻率的采樣脈沖進行填充并計數,從而計算出相位差。填充計數測相法主要應用在要求一定的精度,測量的頻率不是太高但實時性要求很強的場合,易于實現數字化和自動化,低頻數字相位儀適合用填充計數法。
填充計數測相法的基本算法:若正弦波整形后的方波信號頻率為f,周期為T,采樣脈沖周期為TC,方波一個周期內對采樣脈沖計數為,n則被測信號頻率f=1/T=1/NTC。同樣的方法測出兩個同頻正弦波起點之間的時間差為△t,則兩信號的相位差△θ=△t·360°/T。
1.2 系統方案的確定
由系統測量方法可知,數據需要采集、運算及顯示,考慮到FiELD Programmable Gate Array(FPGA)集成度高、I/O資源豐富、穩定可靠,選擇余地大,外圍元件很少,近年來價格下降等優勢,以及MCU良好的人機接口和運算控制功能,所以本系統由MCU和FPGA相結合構成測控主體。FPGA負責采集測頻和測相位差的脈沖信號,MCU負責讀FPGA采集的數據,計算待測信號頻率和相位差并在LCD上顯示。
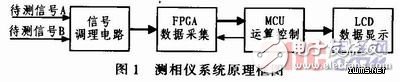
所以,系統由4個部分組成:待測信號調理電路、FPGA數據采集電路、MCU數據運算控制電路和LCD數據顯示電路,如圖1所示。
2 測量誤差的分析與消除
相位測量儀的完善設計,不僅要有合適的測量方法和系統實現方案,還需要著重分析誤差產生的原因和確定消除的方法。
1)填充時鐘頻率(即數據采樣信號)的影響與確定本相位測量儀的測頻范圍為20 Hz~20 kHz,相位差的范圍為△θ=0°~359.9°,相位差的顯示分辨率為0.1°,要求測量相位的絕對誤差≤2。
被測頻率20 Hz≤f≤20 kHz,則周期50μs≤T≤50 ms。
T=50 μs,絕對誤差取0.1°~2°。
則填充時鐘信號周期:0.1°x50 μs/360°≤TC≤2°x50 μs/360°即:1/72(μs)≤TC≤1/3.6(μs),可以得出填充時鐘頻率:
3.6 MHz≤fC≤72 MHz。
T=50ms內對TC=1/3.6(μs)的填充脈沖計數,計數值Nmin=180000≤218;對TC=1/72(μs)的填充脈沖計數,計數值Nmax=3600000≤ 222。
本設計考慮MCU的計算及分頻取得信號的方便,填充時鐘信號頻率fC=20 MHz,測量絕對誤差《1°,FPGA在20 MHz時鐘信號作用下對待測信號周期和相位對應的時間差進行計數,FPGA采樣的二進制數據位為20 bit,可以保證測量的精度。
2)待測信號調理電路中零點漂移的影響與消除待測信號調理電路主要作用是把輸入信號整形變換成矩形波,通常采用過零比較器或者施密特觸發器。
過零比較器在零點電位附近可能會有振蕩,輸入信號在零點電位附近時,電壓比較器處于放大區,整形后的矩形波在邊沿會產生抖動,使系統無法進行測量。要消除這種抖動,可以采用施密特觸發器。為了保證測量的精度,施密特觸發器必須符合兩個條件:一是兩路被測信號幅度基本相等,二是門限電平要基本接近。
3)整形后方渡邊沿的陡峭程度的影響與消除信號經過整形后輸出的矩形脈沖信號直接送給FPGA,則FPGA不能立即獲取穩定的數字脈沖信號,就會使系統的精度受到很大影響。這主要是由于整形后方波邊沿不夠陡峭造成的。要解決此問題,一是選取具有較大壓擺率的器件,二是在比較器的后端加一級微分電路來提升脈沖信號的邊沿。
4)中低頻測量精度的影響與消除采用20 MHz數據采樣信號來循環計數被測信號的周期及相位差對應的時間差,精度達到0.05 μs,20位數字量的單位是0.05μs。利用被測信號刷新采樣計數,實現高頻多測量,低頻少測量,時間計數精確可靠,這樣,FPGA可以為MCU提供穩定的數據。
3 系統硬件電路的設計
3.1 前端信號調理電路的設計
施密特觸發器(遲滯比較器)雖然可以很好地消除比較器過零引起的抖動,但是其輸出信號和輸入信號存在相位差,如果兩路被測信號的幅度基本相等且兩個施密特觸發器的門限電平又很接近,則施密特觸發器引入的相位誤差對測量系統誤差幾乎無影響。
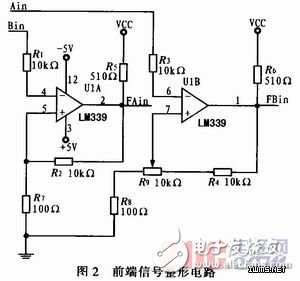
采用LM339內部有4個獨立的電壓比較器,該電壓比較器的特點是:失調電壓小,典型值為2 mV;電源電壓范圍寬,雙電源電壓為±1~±18 V;對比較信號源的內阻限制較寬。同相和反相輸入端電壓差別大于10 mV就能確保輸出能從一種狀態可靠地轉換到另一種狀態,輸出端相當于一只不接集電極電阻的晶體三極管,在使用時輸出端到正電源一般須接一只電阻。在跳變電壓值附近的干擾不超過回差AU,輸出電壓的值就將是穩定的。正反饋可以加快比較器的響應速度。由于遲滯比較器加的正反饋很強,遠比電路中的寄生耦合強得多,所以可免除由于電路寄生耦合而產生的自激振蕩。通過調節電位器,使兩個施密特觸發器的門限電平基本相等,保證輸入電路對相位差測量不帶來誤差。電路如圖2所示。
3.2 系統測量電路設計
以單片機為核心設計相位儀,如其晶振為24 MHz,單片機C/T的計數誤差為1個機器周期為±0.5 μs,則絕對誤差為360°x0.5 μs/50μs=3.6°,所以,當被測信號頻率很高時很難滿足測量要求。
本設計采用AVR單片機與FPGA相結合的方案,FPGA實現數據采集,將所測信號的頻率和相位差所對應時間差轉換為二進制數據傳給單片機;單片機從FPGA獲取數據,經過運算、轉換等數據處理,將被測信號的頻率和相位差在LCD上顯示。
系統電原理圖如圖3所示。MCU采用ATMEL公司的AVR單片機ATmega128,具有先進的RISC結構,大多數指令在一個時鐘周期內完成,有32個8位通用工作寄存器及外設控制寄存器,克服了一般單片機單一累加器數據處理帶來的瓶頸。有128 KB的系統內可編程Flash,4 KB的EEPROM以及4 KB的內部SRAM,遵循JTAG標準的邊界掃描功能,支持擴展的片內調試,可通過JTAG接口實現對Flash、EEPROM、熔絲位和鎖定位的編程。
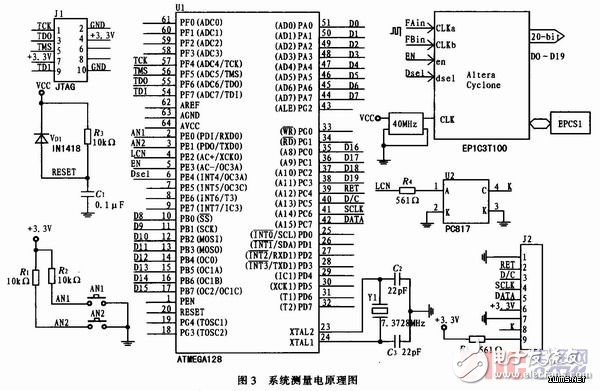
FPGA采用ALTEm Cyclone系列的EP1C3T100,配置芯片為EPCS1,VHDL功能程序經過全編譯會生成.SOF和.pof文件,配置的下載為Byte-Blaster II,[Mode]項選擇“JTAG”為把.sof文件配置到FPGA芯片EP1C3T100中,用于調試;[Mode]項選擇“Active Serial Programming”為把.pof文件下載到配置芯片EPCS1中,系統重新上電時正常運行。
LCD采用HTM12864,為128x64串行數據傳送液晶顯示器,背光燈通過光耦受到控制。
ATmega128和EP1C3T100設計各自的JTAG接口。圖3繪出了ATmega128和EP1C3T100的接口D0~D19、EN、Dsel、LCN;ATmega128與HTM12864的接口RET、D/C、SCLK、DATA;EP1C3T100的輸入信號FAin和FBin,66 MHz外部有源晶振,配置芯片EPCS1。
4 系統軟件的設計
4.1 FPGA數據采集VHDL程序設計
FPGA數據采集的VHDL程序設計是在ALTEra QUARTuslI開發軟件平臺及實驗開發系統上完成的。程序設計采用自頂向下(up-to-down)的設計方法。FPGA系統的模塊構成如圖4所示。采樣信號發生模塊完成時鐘信號源的分頻工作,得到CLK=20 MHz;待測信號采樣模塊在控制信號產生模塊的周期閘門信號Tk和時間清零信號Tcr的作用下,輸出待測信號周期和相位差數據;測量數據提取模塊在鑒相信號JXc和計數提取信號Lad的作用下,并在輸出使能信號EN和數據類型信號Dsel控制下分別輸出周期和相位差數據,交MCU運算處理顯示。










 工商網監
工商網監
評論