聚豐項(xiàng)目 > 基于物聯(lián)網(wǎng)的智能小車平臺(tái)搭建
本設(shè)計(jì)旨在設(shè)計(jì)一款基于物聯(lián)網(wǎng)的智能小車平臺(tái),可以實(shí)現(xiàn)通過wifi控制小車,以及可以通過各種傳感器對(duì)周圍環(huán)境進(jìn)行檢測(cè)以及適當(dāng)?shù)倪M(jìn)行自己的對(duì)環(huán)境的適應(yīng)。
![]() jeffc_good
jeffc_good

![]() jeffc_good
jeffc_good
團(tuán)隊(duì)成員
常旭磊 創(chuàng)客
小車的硬件搭建是個(gè)很復(fù)雜的過程,費(fèi)去了我很多時(shí)間,費(fèi)時(shí)間主要是根據(jù)手上的僅有的器件,所以就是湊出來的,用了很多膠帶,甚至各位客觀可以看到上面有牙膏盒的痕跡。所以一步步的介紹搭建的流程不現(xiàn)實(shí),我就將其畫成示意圖,大概講一下硬件的分布。總之,我的原則是手上有什么就用什么。
執(zhí)行器件主要是兩個(gè)57步進(jìn)電機(jī),兩個(gè)大輪子以及一個(gè)行李箱的萬(wàn)向輪,兩個(gè)步進(jìn)電機(jī)驅(qū)動(dòng)器,電源是24V鋰電池,其直接給驅(qū)動(dòng)器供電,通過一個(gè)電壓轉(zhuǎn)換模塊,轉(zhuǎn)換成12V給Intel Edison的Arduino供電。兩個(gè)超聲波模塊是很常見的HC-SR04 超聲波模塊,傳感器以及控制板就是Grove套件以及Intel Edison套件,小車的車體是一塊亞克力板。整個(gè)硬件的結(jié)構(gòu)圖如下所示,Intel Edison上的接口為Arduino底板上的對(duì)應(yīng)接口。驅(qū)動(dòng)板的使能接口沒有連接,可以省兩個(gè)IO口。

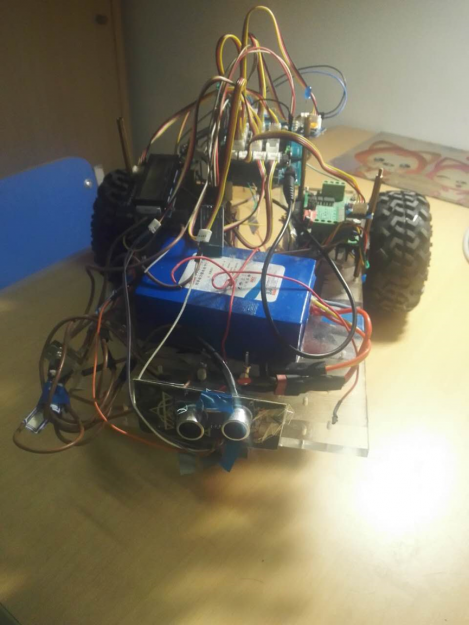
搭建成的小車實(shí)物如下圖所示:

拼湊完成之后還是感覺挺霸氣側(cè)漏的。
從上面看,藍(lán)色電池上面的是藍(lán)牙模塊。

驅(qū)動(dòng)器部分的細(xì)節(jié),下面是繼電器。

這是車后面,兩個(gè)步進(jìn)電機(jī)還是很清楚的

電池部分,上面的藍(lán)色的方塊是24V鋰電池,下面的盒子里面是電源轉(zhuǎn)換模塊,將24v轉(zhuǎn)換成12V提供給主板。

前面的萬(wàn)向輪

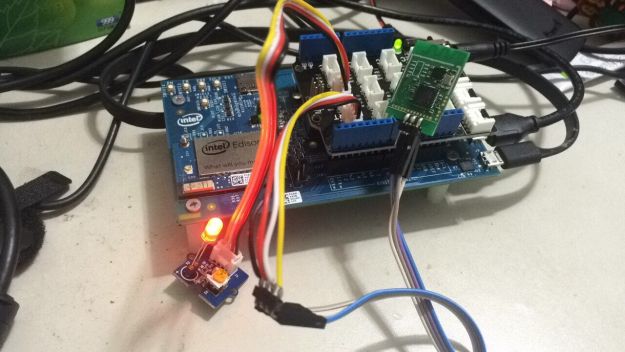
主控板部分,

程序的開始肯定是初始化了,初始化主要包括如下幾個(gè)步驟:

初始化的部分包括了串口、Wifi、Web服務(wù)器、LCD、IO以及定時(shí)器的初始化,串口采用Serial 1,也就是Arduino板上的RX、TX兩個(gè)引腳占用的串口,其主要是打印出一些要查看的信息,這里我連接了一個(gè)串口藍(lán)牙模塊;無線掃描主要是查看一下周圍的無線有哪些,然后連上指定的無線;Web服務(wù)器主要是等會(huì)的傳送Html代碼;LCD要顯示溫度,對(duì)其進(jìn)行初始化;IO根據(jù)實(shí)際需要進(jìn)行輸入輸出的初始化;定時(shí)器初始化主要是對(duì)Timer1的初始化,其為步進(jìn)電機(jī)提供脈沖,周期是10ms。
主程序如下所示:

前面主要是包括讀取模擬量值,并進(jìn)行相應(yīng)的顯示以及控制。溫度值是將環(huán)境溫度顯示在LCD以及網(wǎng)頁(yè)上;亮度值控制小燈是否亮滅,環(huán)境足夠亮?xí)r熄滅小燈,環(huán)境比較暗的時(shí)候打開小燈;聲音控制蜂鳴器是否發(fā)聲,當(dāng)周圍聲音很吵的時(shí)候表示有人闖入(模擬監(jiān)控)發(fā)出警報(bào)聲,并至少延遲一秒鐘,家里沒人的時(shí)候可以用來嚇唬小偷。超聲波傳感器主要是來檢測(cè)前后距離,當(dāng)?shù)陀诎踩嚯x的時(shí)候改變運(yùn)行方向,防止碰撞到墻壁或其他障礙物。在之后就是主要的在服務(wù)器上運(yùn)行網(wǎng)頁(yè)的實(shí)現(xiàn)了,其是控制的主體,其主要包括建立客戶端,讀取客戶端請(qǐng)求內(nèi)容,并發(fā)送網(wǎng)頁(yè)內(nèi)容。其根據(jù)客戶端的返回內(nèi)容主要包括啟動(dòng)、停止、前進(jìn)、后退、左轉(zhuǎn)以及右轉(zhuǎn)。
程序編寫
程序主要講幾段,以下片段是判斷周圍環(huán)境,val1是判斷亮度,val2是判斷聲音大小,length1以及l(fā)ength2是判斷前后安全距離的判斷。

下面一段是判斷web客戶端返回的請(qǐng)求中的關(guān)鍵字是否有返回相應(yīng)的控制類的字符,比如說是否返回了GET /On,如果有,就是啟動(dòng)小車。

步進(jìn)電機(jī)的脈沖是在定時(shí)器中斷函數(shù)里面的,其到時(shí)候就將兩個(gè)的PUL引腳進(jìn)行反轉(zhuǎn),形成脈沖。當(dāng)然,其速度不可控。

這個(gè)程序段是超聲波的驅(qū)動(dòng)函數(shù),num是對(duì)前后兩個(gè)超聲波的判斷,其為1的時(shí)候代表的前面的超聲波,其為2的時(shí)候代表驅(qū)動(dòng)后面的超聲波。先給trig至少10us的拉高,然后拉低,這時(shí)候Echo在返回超聲波的時(shí)候是會(huì)拉高的,并且拉高時(shí)間跟距離是成正比的關(guān)系,因此需要記錄這段拉高的時(shí)間。duration = pulseIn(echo, HIGH, 60000)這句會(huì)讀取引腳上的高電平脈沖,最大脈沖時(shí)間間隔為60毫秒,并且把結(jié)果賦值給duration變量

調(diào)試與實(shí)驗(yàn)
將下載的執(zhí)行文件設(shè)置成開機(jī)啟動(dòng)項(xiàng)后就可以開機(jī)后自動(dòng)等待它的運(yùn)動(dòng)了。當(dāng)然開始主要是通過開關(guān)給系統(tǒng)上電了,Edison的啟動(dòng)過程還是挺慢的。我用串口藍(lán)牙,可以通過手機(jī)上的藍(lán)牙調(diào)試助手查看系統(tǒng)打印的信息,并能最終得到Edison得到的IP號(hào)碼。藍(lán)牙接收到的信息如下所示:

在瀏覽器輸入IP:8080(這是我定義的端口號(hào)),然后就可以進(jìn)入網(wǎng)頁(yè)控制頁(yè)面了。

點(diǎn)擊turn on就是啟動(dòng)小車,點(diǎn)擊turnoff就是關(guān)閉小車,turn on狀態(tài)下是可以控制小車運(yùn)動(dòng)方向的。這時(shí)候藍(lán)牙界面是可以顯示客戶端的請(qǐng)求信息。

實(shí)驗(yàn)總結(jié)
因?yàn)镮ntel Edison的緣故,竟然第一次接觸了Arduino的開發(fā),怪不得很多人喜歡用Arduino,確實(shí)是因?yàn)楹芎?jiǎn)單,無腦就能完成項(xiàng)目的實(shí)現(xiàn)。所以很happy的采用這種簡(jiǎn)單的方法進(jìn)行試用以及功能驗(yàn)證。上手是快,但是隨著開發(fā)的深入,也會(huì)發(fā)現(xiàn),其實(shí)采用這種方法的局限性很強(qiáng),過于依賴提供的庫(kù),而且很多功能無法實(shí)現(xiàn)。當(dāng)然也可能是自己并不是很了解這些庫(kù)。總之,通過Arduino的開發(fā)過程是個(gè)很開心的過程,但是如果深層次的學(xué)習(xí)技術(shù)我感覺還是不能這么玩。
我的這次試用的項(xiàng)目的實(shí)現(xiàn),總體來說是實(shí)現(xiàn)了預(yù)期的各種功能,但是功能的實(shí)現(xiàn)效果一般,當(dāng)然跟硬件的胡亂拼湊有關(guān)系,但是也是跟很多地方設(shè)計(jì)還是不是很精確。所以接下來需要進(jìn)行深入的學(xué)習(xí)和開發(fā),希望能夠打造出一個(gè)靈活好用的物聯(lián)網(wǎng)智能小車平臺(tái)。
整體來說,這次提供的試用套件用起來很方便,資料齊全,而且定位準(zhǔn)確,其豐富的資源以及多樣的開發(fā)環(huán)境,可以滿足各個(gè)層次的發(fā)燒友的需求,可以像我試用這樣簡(jiǎn)單的玩,也可以很高端的開發(fā)。Intel Edison模塊小巧的外形以及強(qiáng)大的處理運(yùn)算能力是對(duì)當(dāng)下物聯(lián)網(wǎng)等行業(yè)很準(zhǔn)確的定位,而Arduino底板以及其相應(yīng)的開發(fā)環(huán)境使得整個(gè)的開發(fā)難度可以降到非常低。Grove套件則能使得玩法各種各樣,總體很滿意。當(dāng)然,由于其IO引腳數(shù)等相對(duì)較少的緣故,我認(rèn)為其無法滿足大的開發(fā)項(xiàng)目的需求。




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)