聚豐項目 > 基于wifi通信控制的四旋翼控制系統
采用STM32F401RE做為四旋翼的控制器,EMW3080Wi-Fi模塊作為四旋翼與外面設備的通信裝置,執行器采用無刷電機,姿態傳感器采用MPU6050模塊,無線控制裝置可用手機或電腦。控制算法暫定采用串級PID控制,外環控制角度,內環控制角速度。后期可做優化,濾波采用互補濾波。
![]() h1654155952.9197
h1654155952.9197
![]() h1654155952.9197
h1654155952.9197
團隊成員
施超宇 總體設計
硬件結構主要由5個部分組成,主控制器STM32f401-Nucleo是四旋翼飛行器的大腦控制整個系統,借助WiFi—EMW3080模塊進行通信,MPU6050作為獲取四旋翼飛行器姿態信息的傳感器,四個無刷電機作為四旋翼飛行器的執行器,四旋翼機架采用450機架,其結構圖如下圖所示:

1、STM32F401RET6微控制器,基于ARM Cortex-M4處理器,帶DSP,最高支持84MHz主頻
2、支持Arduino UNO R3 Shield擴展板,微控制器所有IO口引腳通過排針座引出ST-LINK/V2-1調試器,支持對外部微控制器調試3個LED;一個USB通訊LED、一個電源LED、一個用戶LED;兩個機械按鍵:復位、用戶USB接口的3個不同功能:虛擬串口、容量存儲、調試接口
3、3種不同供電方式:mini USB接口供電、IO引腳用電、通過Arduino UNO R3 Shield接口供電
4、支持Keil、IAR、embed在線IDE的設計工具
5、STM32F401 Nucleo開發板包含了STM32F系列板卡慣有的機械按鍵、LED指示燈、mini USB調試接口,眾多IO口外設通過排針座引出等功能,除此之外,也有與眾不同之處,如兼容Arduino Shield接口,并且可以通過Arduino Shield擴展接口給板卡供電,板卡搭載了STM32F401RET6核心微控制器,基于32位的高性能ARM Cortex-M4處理器,帶FPU單元,最高能支持84MHz主頻,見下圖。

電調采用大唐宏運30A

無刷電機采用2212/920KV

無線模塊采用EMW3080
1、EMW3080是單3.3V供電的、集成Wi-Fi和Cortex-M4F MCU的嵌入式Wi-Fi模塊,最高支持133M主頻和256K RAM,強大的浮點運算。EMW3080(B):無內部加密芯片,Memory、外設接口資源豐富,能滿足大部分應用需求和多云的要求。

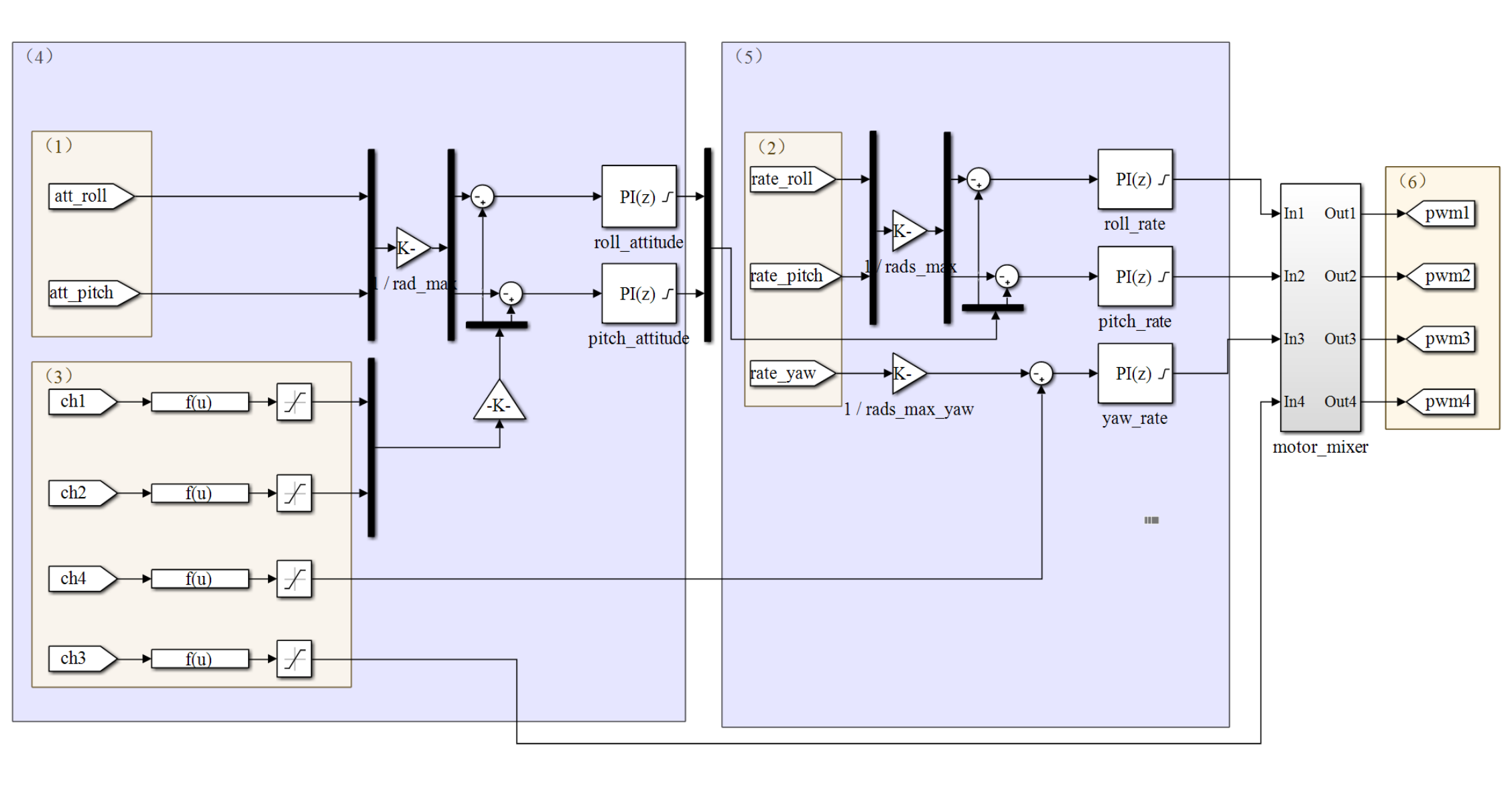
四旋翼飛行器控制系統是一個對耦合度要求高、欠驅動、需要較高的控制準確性與實時性的控制系統,四旋翼飛行器控制系統在姿態方面主要由橫滾角(Roll)、俯仰角(Pitch)、偏航角(Yaw)、三軸角速度與油門(thrust)這幾個控制量體現,四旋翼飛行器的整個控制系統采用串級PID控制系統,,如下圖所示,內環控制角速度,用于對飛行器的三個軸的角速度控制,外環控制角度,用于對飛行器的姿態控制。利用四旋翼四個電機各姿態角分量疊加關系得出PWM波輸出值來控制每個電機轉動速度。


下圖為利用simulink對四旋翼飛行器做的仿真框圖,采用的是串級PID控制。

利用Matlab的GUI界面設計做的一個可視化仿真調試界面進行相應的仿真調試,如下圖所示,其中Ch1、Ch2、Ch3和Ch4通道分別對應四旋翼roll、pitch、thrust和yaw的設定。當設定四旋翼向右翻滾時,四旋翼繞x軸旋轉的方向增大,如下圖Gryroscope窗口下的藍色曲線。加速度由突然增大到趨于平穩來進行自平穩校準,如Accelerometer窗口下的紅色曲線和綠色曲線。


Nucleo模塊程序采用Mbed開發,數據采集計算以及PWM賦值主要在定時器中斷中執行,main函數代碼如下:
int main(void)
{
SystemInit(); //系統初始化
delay_ms(50);
InitMPU6050(); //MPU6050初始化
delay_ms(50);
Get_offsets(); //機體坐標矯正
for(pre_cnt=0;pre_cnt<FILTER_NUM;pre_cnt++)
{
Prepare_Data();
}
while(1)
{
}
}
姿態傳感器進行的濾波處理算法采用互補濾波,代碼如下:
void imuUpdate(Axis3f acc, Axis3f gyro, state_t *state , float dt) /*數據融合 互補濾波*/
{
float normalise;
float ex, ey, ez;
float q0s, q1s, q2s, q3s; /*四元數的平方*/
static float R11,R21; /*矩陣(1,1),(2,1)項*/
static float vecxZ, vecyZ, veczZ; /*機體坐標系下的Z方向向量*/
float halfT =0.5f * dt;
Axis3f tempacc =acc;
gyro.x = gyro.x * DEG2RAD; /* 度轉弧度 */
gyro.y = gyro.y * DEG2RAD;
gyro.z = gyro.z * DEG2RAD;
/* 某一個方向加速度不為0 */
if((acc.x != 0.0f) || (acc.y != 0.0f) || (acc.z != 0.0f))
{
/*單位化加速計測量值*/
normalise = invSqrt(acc.x * acc.x + acc.y * acc.y + acc.z * acc.z);
acc.x *= normalise;
acc.y *= normalise;
acc.z *= normalise;
/*加速計讀取的方向與重力加速計方向的差值,用向量叉乘計算*/
ex = (acc.y * veczZ - acc.z * vecyZ);
ey = (acc.z * vecxZ - acc.x * veczZ);
ez = (acc.x * vecyZ - acc.y * vecxZ);
/*誤差累計,與積分常數相乘*/
exInt += Ki * ex * dt ;
eyInt += Ki * ey * dt ;
ezInt += Ki * ez * dt ;
/*用叉積誤差來做PI修正陀螺零偏,即抵消陀螺讀數中的偏移量*/
gyro.x += Kp * ex + exInt;
gyro.y += Kp * ey + eyInt;
gyro.z += Kp * ez + ezInt;
}
/* 一階近似算法,四元數運動學方程的離散化形式和積分 */
q0 += (-q1 * gyro.x - q2 * gyro.y - q3 * gyro.z) * halfT;
q1 += (q0 * gyro.x + q2 * gyro.z - q3 * gyro.y) * halfT;
q2 += (q0 * gyro.y - q1 * gyro.z + q3 * gyro.x) * halfT;
q3 += (q0 * gyro.z + q1 * gyro.y - q2 * gyro.x) * halfT;
/*單位化四元數*/
normalise = invSqrt(q0 * q0 + q1 * q1 + q2 * q2 + q3 * q3);
q0 *= normalise;
q1 *= normalise;
q2 *= normalise;
q3 *= normalise;
/*四元數的平方*/
q0s = q0 * q0;
q1s = q1 * q1;
q2s = q2 * q2;
q3s = q3 * q3;
R11 = q0s + q1s - q2s - q3s; /*矩陣(1,1)項*/
R21 = 2 * (q1 * q2 + q0 * q3); /*矩陣(2,1)項*/
/*機體坐標系下的Z方向向量*/
vecxZ = 2 * (q1 * q3 - q0 * q2);/*矩陣(3,1)項*/
vecyZ = 2 * (q0 * q1 + q2 * q3);/*矩陣(3,2)項*/
veczZ = q0s - q1s - q2s + q3s; /*矩陣(3,3)項*/
if (vecxZ>1) vecxZ=1;
if (vecxZ<-1) vecxZ=-1;
/*計算roll pitch yaw 歐拉角*/
state->attitude.pitch = -asinf(vecxZ) * RAD2DEG;
state->attitude.roll = atan2f(vecyZ, veczZ) * RAD2DEG;
state->attitude.yaw = atan2f(R21, R11) * RAD2DEG;
if (!isCalibrated) /*校準*/
{
baseZacc = tempacc.x* vecxZ + tempacc.y * vecyZ + tempacc.z * veczZ;
isCalibrated = true;
}
state->acc.z= tempacc.x* vecxZ + tempacc.y * vecyZ + tempacc.z * veczZ - baseZacc; /*Z軸加速度(去除重力加速度)*/
}
Andorid控制界面:



 工商網監
工商網監