聚豐項目 > 三軸六槳飛行器
現在多軸無人機的發展已經是如火如荼,中國大疆無人機享譽世界,很多產品甚至被用于軍事用途,在中國還有很多多軸飛行器制作公司,但多軸飛行器多以四軸為主體架構,四軸架構也是最經典的架構,在一些架構方案中也少有一些三軸架構的設計,但也是加入舵機來改變三軸中其中一軸的旋翼傾斜面來平衡旋翼旋轉產生的不平衡扭矩,于是再參考四軸和三軸各種方案下本人設計了這款三軸六槳飛行器,它采用雙電機上下同軸旋翼反轉的設計,消除了因旋翼旋轉不對稱而產生不對稱扭矩,使其在不增加舵機控制的情況下仍能保持三軸的造型不變。 軟件方面采用大航四軸基于stm32的開源代碼主體,進行微調設計增加了兩路pwm輸出,對上位機控制部分進行重新設計,對六路pwm輸出進行重新整合設計,對轉向方案進行微調,納入新增加的兩路pwm輸出。利用RAM-MBED在線編譯平臺軟件編寫和調試,配合慶科的wifi模塊代碼利用手機app對飛行器的飛行姿態進行控制。 控制芯片采用Nucleo stm32f401RET6單片機配合RAM-MBED在線編譯平臺對軟件和硬件進行綜合的調試。
![]() 小小風946
小小風946
![]() 小小風946
小小風946
團隊成員
張久峰 組長
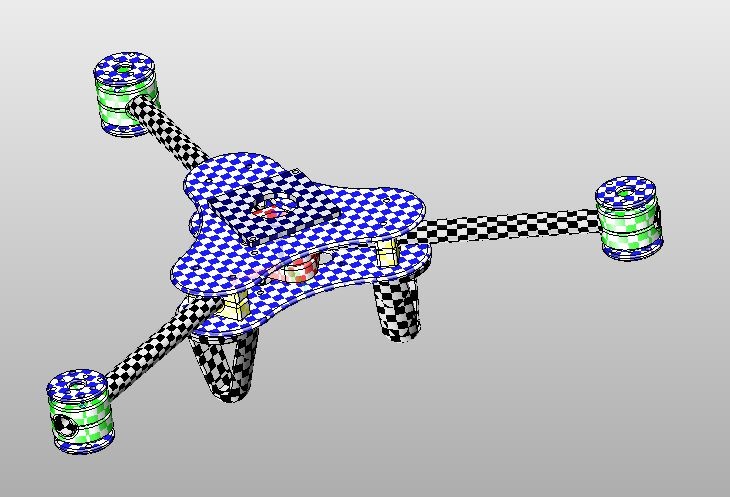
三軸機架:運用3d打印技術打印的三軸機體結構負責固定和連接個功能模塊,是個模塊的搭載平臺和總體結構設計的體現。
基于Nucleof401的飛行控制器:基于大航四軸開源代碼為藍本,進行微調設計,對真題的飛行姿態進行控制,并配合慶科wifi模塊接收發送姿態調整信息并進行響應動作。
慶科wifi通信模塊:向手機發送和接受飛行器相關數據信息是飛行器的指令傳達中心。
電源系統:采用7.2v、3s鋰電池供電,6路分點板分電。并配有低壓報警模塊。
動力系統:采用12A電調和直流無刷電機,為飛行器提供動力。
軟件方面采用大航四軸基于stm32的開源代碼主體,進行微調設計增加了兩路pwm輸出,對上位機控制部分進行重新設計,對六路pwm輸出進行重新整合設計,對轉向方案進行微調,納入新增加的兩路pwm輸出。利用RAM-MBED在線編譯平臺軟件編寫和調試,配合慶科的wifi模塊代碼利用手機app對飛行器的飛行姿態進行控制。
由于錯誤判斷四軸改三軸的難度,原始設計仿真不仔細,很多細節沒有考慮,主題方案設計不明確,使得項目后期進入無章的亂調 當中,因此作品未能如期完成,本人對次深表遺憾,并誠摯的對大賽籌備組說一聲抱歉,本人愿意歸還大賽主辦方前期借于本人的全部材料,十分感謝評委能夠選中本人異想天開的設計想法。最后,再次對各位評委老師說一聲抱歉!
 工商網監
工商網監