聚豐項(xiàng)目 > 基于RT-Thread的自校準(zhǔn)模擬電磁炮
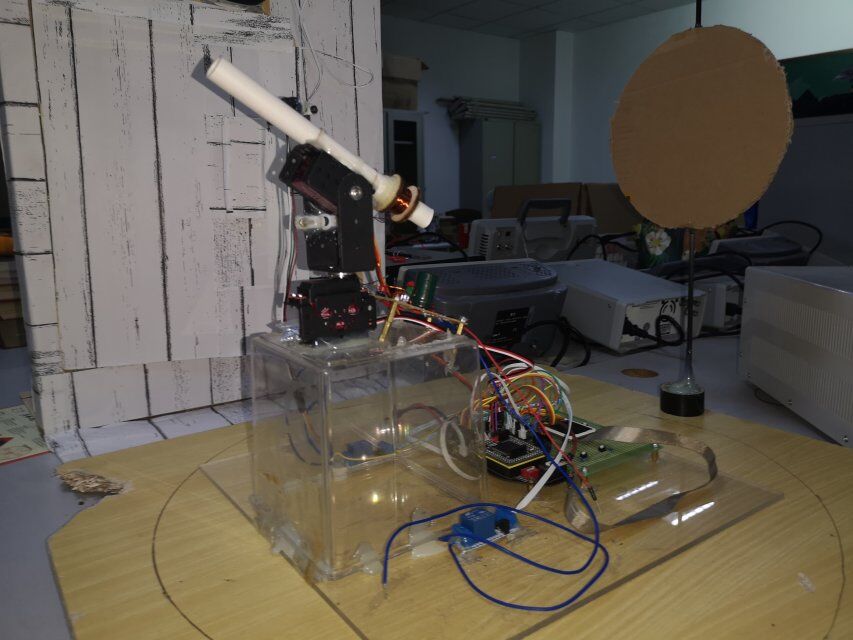
本系統(tǒng)基于RT-Thread嵌入式實(shí)時(shí)操作系統(tǒng),與磁阻式電磁炮、云臺(tái)、TOF激光測(cè)距、LCD液晶顯示屏等組成的尋靶測(cè)距控制系統(tǒng)。 根據(jù)激光測(cè)距檢測(cè)的位置參數(shù)通過PID算法控制云臺(tái)舵機(jī)自動(dòng)鎖定發(fā)射目標(biāo),同時(shí)通過輸出可控的PWM信號(hào)給云臺(tái)舵機(jī),來控制自動(dòng)巡跡目標(biāo)的定位和發(fā)射裝置的水平、垂直角度。主控制器根據(jù)發(fā)射參數(shù)計(jì)算出電磁炮發(fā)射裝置的水平、垂直角度及對(duì)充放電電路的時(shí)間常數(shù),控制云臺(tái)轉(zhuǎn)動(dòng)及實(shí)現(xiàn)電磁炮的發(fā)射。
![]() 莫離哈哈哈
莫離哈哈哈
![]() 莫離哈哈哈
莫離哈哈哈
團(tuán)隊(duì)成員
姚文龍 學(xué)生
1. LCD接口電路

2.LED接口電路

3.激光測(cè)距串口接收電路


4.PWM信號(hào)輸出電路(舵機(jī)控制)


RT-Thread使用情況概述:
使用了信號(hào)量,線程創(chuàng)建,F(xiàn)inSH控制臺(tái),中斷管理
一、main函數(shù)
1.創(chuàng)建一個(gè)信號(hào)量用于中斷和任務(wù)之間的同步

2.創(chuàng)建兩個(gè)任務(wù),任務(wù)1用于液晶屏顯示,任務(wù)2用于調(diào)整PWM信號(hào)占空比(舵機(jī)角度)

3.任務(wù)1入口函數(shù),首先獲取串口接收中斷的信號(hào)量,如果信號(hào)量已經(jīng)釋放,說明激光測(cè)距模塊的距離值已經(jīng)更新,執(zhí)行后面的顯示程序

4.任務(wù)2入口函數(shù),用于改變PWM信號(hào)的占空比

二、中斷服務(wù)函數(shù)
1. 串口接收中斷,用于接收激光測(cè)距模塊返回的距離值,一幀數(shù)據(jù)分為九個(gè)字節(jié),前兩個(gè)字節(jié)是幀頭,第三四個(gè)字節(jié)為距離值的高八位和低八位,第五六個(gè)字節(jié)分別為信號(hào)強(qiáng)度的高八位與低八位,最后一個(gè)字節(jié)為校驗(yàn)和。當(dāng)成功接收到一幀數(shù)據(jù)之后,釋放信號(hào)量,任務(wù)1可以更新顯示的距離值,避免了LCD屏幕的無效刷新,節(jié)省了CPU資源的利用率。

2.定時(shí)器中斷TIM3
首先將定時(shí)器3的引腳重映射到PC6、PC7

通過改變TIM3->CCR1寄存器的值來修改占空比,達(dá)到對(duì)舵機(jī)的控制

詳細(xì)代碼莫離/莫離的小倉(cāng)庫(kù) (gitee.com)
該系統(tǒng)能夠自動(dòng)識(shí)別目標(biāo)(以水杯為例),并控制舵機(jī)轉(zhuǎn)向該目標(biāo),同時(shí)將相關(guān)信息顯示在LCD上
(0.00 MB)下載
dianzi_0101: 666
回復(fù)
dianzi_0101: 演示只看到目標(biāo)追蹤,沒看到電磁炮呀
回復(fù)
jf_25703341: 19電賽?
回復(fù)
 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)