 電子發燒友App
電子發燒友App


從汽車被創造出來那天起,對自動駕駛能力的渴求就成了一代代工程師攻堅的方向。而自適應巡航控制(Adaptive Cruise Control,簡稱『ACC』)的出現則讓普通消費者開始對自動駕駛汽車有了期待和暢想。回到 20 世紀,汽車制造商們開始從 17 世紀工程師們的成果上尋找靈感,最終 1958 款的克萊斯勒帝國(Chrysler Imperial)成了全世界第一臺搭載駕駛輔助系統的車型。
這臺老爺車當時配備的這套系統也叫做「autopilot」,不過和特斯拉沒什么關系。它接在發動機的驅動輪軸上,儀表臺的地方有一個撥盤可以設置巡航速度,還有一臺另加的電機通過調整檔位來維持車速。盡管現在量產車上使用的 ACC 系統經過漫長的技術迭代已經和之前的大不一樣了,但殊途同歸,目的都是讓駕駛盡可能地實現自動化。
1958 款克萊斯勒帝國車型搭載了一套 Auto-Pilot 定速巡航系統 | GRautogallery
雖然真正意義上的自動駕駛汽車還沒有走入消費市場,但自適應巡航系統的應用讓用戶得以提前一窺無人車時代的端倪。系統開啟后,車輛能夠按照設定的跟車距離行駛,通過不斷調整車速來維持兩車的距離。駕駛員這個時候仍需要雙手握住方向盤,除非出現緊急情況,否則不需要對車輛進行干預。
回望這項功能的發展史,我們可以看到它技術的迭代與升級,以及依靠體驗逐漸積累和建立的用戶信任與滿意度,這是自動駕駛時代還不曾擁有的。
巡航功能的技術變遷
首先要明確的一點是,巡航功能,不管是定速巡航還是自適應巡航,都算不上是安全功能,它們最大的作用是讓開車這件勞心費神的事兒變得舒心一些。而定速巡航(Cruise Control)作為鼻祖式的存在,最早可以追溯到 1788 年,當時詹姆斯·瓦特(James Watt)和馬修·博爾頓(Matthew Boulton)用它來控制蒸汽機的運行,而調速器這種裝置(Cruise Control 也是調速器的一種)則在 17 世紀就得到了應用。
之后演變而來的定速巡航裝置則是由發明家和機械工程師拉爾夫·蒂托(Ralph Teetor)于 1948 年發明的,首次搭載這套系統的車型正是 1958 年上市的克萊斯勒帝國。
從技術原理上來看,定速巡航由 EMS 進行控制,EMS 會同時參考變速箱信號、當前車速和駕駛員設定速度,通過調整節氣門開度和變速箱等控制單元對車速進行調整,實現巡航。
開啟自適應巡航功能的特斯拉儀表界面 | Electrek
只不過隨著整個社會的進步,道路交通也變得越來越復雜,只是控制車速已經不能讓駕駛過程變得舒適了,這個時候自適應巡航系統就上線了。
顧名思義,這套系統的關鍵在于「自適應」三個字。它借助外部傳感器(雷達、攝像頭、激光傳感器等)檢測自車與前方車輛的距離和相對速度,并控制自身車速和前車保持固定的距離。假設前車變道離開,在未識別到新的目標物之前,它會控制車輛按照設定的車速行駛。
從可實現的功能等級來看,目前主流的 ACC 系統還可以分為兩類:
自適應巡航。自動加減速,讓車輛按照預設的速度或者與前車保持一定距離行駛。低于一定速度退出,一般是 30 公里/小時;
自適應巡航+自動啟停 (Stop & Go)。能以任何速度進行巡航,包括在完全停止后隨著前車的移動而恢復之前的行駛狀態。
《消費者報告》針對 ACC 功能的用戶調研結果 | Consumer Reports
在美國《消費者報告》進行的一項關于「高級安全系統」的用戶調研中,有 85% 的車主對 ACC「非常滿意」,有 19% 的用戶表示自適應巡航系統幫助他們成功避免了一次交通事故的發生,72% 的受訪者對這套系統足夠信任。
雖然從用戶的角度來看,自適應只比定速巡航復雜了那么一點點,但從汽車工程層面來看,兩項技術實現起來的難度完全不是一個等級的。
ACC 因為涉及到汽車的自動加減速控制,不但需要發動機管理系統 EMS 參與控制,自動變速箱控制器 TCU,電子穩定程序 ESP 以及電子駐車 EPB 都要介入,這其中還涉及到更復雜的人機交互界面設計和雷達、攝像頭等外部傳感器的管控。雖然成本不可避免地增加了,但它對駕駛體驗的提升效果也是十分明顯。特別是在高速公路上,可以大幅緩解人的緊張情緒。
如果說自動變速箱解放了人的左腳,自適應巡航解放了人的右腳,那么下一代的領航技術(autopilot)則讓我們的雙手得以短暫松開方向盤,朝著自動化駕駛的方向逐步邁進。
奔馳是最早讓這項技術上車的主機廠。2013 年發布的最新一代奔馳 S 級車型搭載了「Distronic Plus with Steering Assist」智能系統。它本質上是在 ACC 的基礎上增加了轉向輔助的功能,這樣系統能夠自動控制方向盤轉動,實現車道保持或低速工況下隨前車小幅橫向擺動的功能,從而讓駕駛員的雙手也得以解放出來。
功能的更進一步也意味著新硬件的升級。要對轉向控制就必須有前視攝像頭的加入,利用人工智能算法實現對車道線的檢測,彌補了雷達傳感器的缺陷(比如縱向速度和距離測量精度高,但橫向較差)。而要更進一步,實現全速度范圍內的加減速以及獲得主動變道的能力,則需要更多傳感器以及控制、執行機構的配合。當然,車輛的電控單元的數量也會大幅增加,軟件算法以及量產前的測試工作都會相應變得很復雜。
特斯拉的 Autopilot 從功能構成上來看,主要是由自適應巡航和自動轉向組成的。只不過特斯拉把它叫做「Traffic-Aware Cruise Control(TACC)」。至于自動轉向,除了能夠實現車道保持外,更新至最新版本的 Autopilot 上線了「Navigate on Autopilot」功能,它能夠在不提示車主的情況下實現自動變道。由于還是 beta 版本,實際體驗中系統經常在不合理的時機變道,沒有減輕壓力不說,倒是先把人嚇得一身冷汗。美國《消費者報告》的試駕編輯調侃道,「這種感覺就像看著你的孩子開車一樣,心驚肉跳,亞歷山大!」。
用戶可以自行選擇將變道提示關掉,Autopilot 系統能夠實現自動變動 | Engadget
不過特斯拉已經算是在巡航和轉向功能上優化做得很不錯的品牌了,隨著 FSD 硬件平臺的投入,未來也會在「TACC+Auto Steer」的基礎上釋放更多的自動駕駛能力。而根據《消費者報告》的調研顯示,除了特斯拉,凱迪拉克、福特、現代捷恩斯,林肯、奔馳、保時捷、沃爾沃車型搭載的 ACC 功能表現最佳。
ACC 的工作原理和局限性
正如上面所提到的,實現 ACC 功能最關鍵的是雷達傳感器。系統開啟后,雷達對前車最遠的探測距離可以達到 200 米,一旦檢測到目標物,自車車速下降并維持設定的距離進行巡航。
為了保持距離,雷達會向監測兩車距離的中央控制單元發送信號。以特斯拉的 Autopilot 為例,如果探測到前方有車輛,主動巡航控制可在任意車速下(靜止下也可以)啟動,但前提是自車與前車至少相距 150 厘米。一旦前車變道離開,系統會控制車輛加速至預設的速度行駛。而設定巡航速度的話,以特斯拉 Model 3 為例,將巡航控制桿向下移動到底一次,然后松開。這樣可以將巡航速度設為檢測到的速度限制或當前行駛速度,以較高速度為準。
假設行駛在多車道的公共道路上,傳感器檢測到前方出現多個可追蹤的車輛,這個時候 ACC 系統會進行甄別并選擇優先目標進行跟車。如果有其他車輛超過了自車,ACC 會實施發動機管理并進行剎車,將車速逐步降下來。假設系統判定需要進行急剎,但減速過程消耗的能量超過了車輛能夠提供最大剎車動能的 30%,那么儀表上就會出現視覺信號并發出蜂鳴警報,提醒駕駛員手動進行剎車操作。
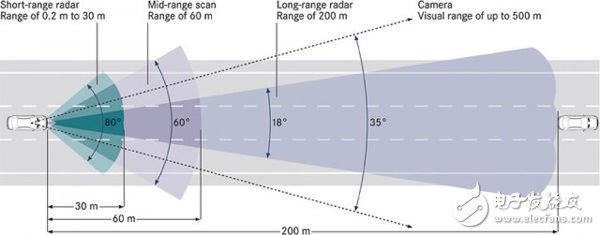
一套 ACC 系統主要由雷達和攝像頭兩種傳感器組成 | Extremtech
盡管目前各家的 ACC 技術已經非常成熟了,但由于傳感器硬件存在局限性,首當其沖,在天氣惡劣的情況下使用會受到影響,也存在一定的安全隱患。譬如遇到大雨或大雪天氣,位于前格柵或前擋泥板下的傳感器可能會因無法正常工作失靈。特斯拉 Model 3 的用戶手冊中就提示了下列幾種不宜開啟主動巡航控制的情況:
道路有急轉彎
能見度差(因大雨、大雪、濃霧等造成)
強光(比如迎面而來的前照燈燈光或直射的陽光)妨礙攝像頭視野時
雷達傳感器被遮擋(灰塵、遮蓋等)
擋風玻璃阻擋攝像頭的視野(水霧、塵土或貼紙遮擋等)
此外,就 ACC 本身而言,它的傳感器配置現在是沒辦法應對變化的道路限速的。這也是為什么絕大多數品牌都建議用戶在高速公路或環城高速等結構化道路上使用,因為這些地方的限速情況統一,基本不會有什么幺蛾子發生。比如凱迪拉克的 Super Cruise 就嚴格設定了可開啟的范圍(完成高精度地圖繪制的高速公路區域)。
還有就是在上面提到的多車道情況下,由于 ACC 系統配置的軟硬件能力有限,所以在遇到多個目標物的時候很可能會出現識別錯誤的情況。特別是有彎道的情況下,識別前車的錯誤率會更高一些。
通用 Super Cruise 系統有著嚴格的 ODD 限定,只能在繪制了高精度地圖的高速公路使用 | Consumer Reports
所以盡管 ACC 本身用起來可以增加駕駛的舒適性,但因為它依然不是真正的自動駕駛技術,所以不能完全依賴。一旦系統提醒可能需要接管的時候,一定要毫不猶豫地踩下剎車,避免意外情況的發生。
邁向自動駕駛時代的前夜
現階段,自適應巡航系統還遠遠不能提供完整的自動駕駛體驗,但從《消費者報告》的用戶調研來看,目前大家對這項功能的滿意度和信任度非常高。就能力而言,絕大多數的 ACC 系統能夠做到與前車保持時距行駛,這已經從某種程度上解放了司機們的雙腳。更先進更智能的,比如通用的 Super Cruise,盡管它的 ODD(Operational Design Domain,設計適用范圍)被限制得非常死,但在合適的工況下也算是完全實現了解放雙手。
隨著軟件算法以及傳感器硬件能力的提升,ACC 自然也會變得功能越來越復雜,這意味著機器將獲得越來越多的控制權,同時駕駛體驗有望得到大幅提升。更關鍵的是,因為體驗的提升人們的信任和滿意也許會因此逐漸「流向」自動駕駛,而不是因為那些酷炫的 Demo 和演示視頻。
借著自動駕駛技術進步的浪潮,我們完全可以期待「人」的監管角色的逐步退場,以及人和機器以協同配合的方式完成一次又一次的安全出行。









 工商網監
工商網監
評論