 電子發燒友App
電子發燒友App


自動駕駛的興起改變了傳統汽車毫米波雷達行業的面貌。
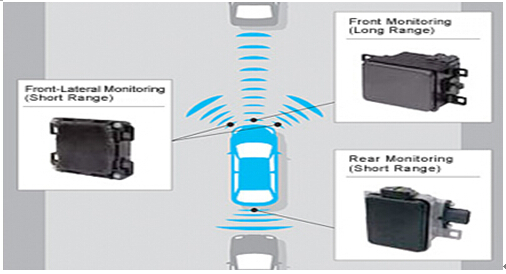
對前視和360度環繞感知的需求不斷增加,促使汽車制造商根據車內外的應用,尋求最佳的射頻性能、功耗、分辨率和尺寸。
而高角分辨率(也被稱為點云成像)汽車毫米波雷達市場正在成為全球三大汽車芯片巨頭(恩智浦、德州儀器和英飛凌)的下一個戰場。其中,恩智浦和英飛凌是傳統雷達芯片市場的TOP2,德州儀器則是近兩年憑借單芯片集成方案殺入這個市場。
?
成像雷達是雷達的一個子集,它的名字來源于它的高角分辨率能夠提供清晰的圖像。角度分辨率是區分在相同距離和相同相對速度范圍內的物體的能力,同時能夠在高分辨率下識別靜態對象。
半年前,恩智浦宣布與一家中國供應商合作,鞏固其在中國毫米波雷達市場份額,同時幫助開發所謂的“成像雷達”。隨著ADAS及ADS市場滲透率逐步提升,作為感知組合中不可缺少的傳感器,汽車毫米波雷達的市場需求將出現爆發式增長。
恩智浦表示,向更高級別自動駕駛系統的升級,是汽車雷達大幅增長的主要原因。今天的量產新車通常在L1和L2級ADAS上使用1到3個毫米波雷達(前向和角雷達),而未來的L4和L5級自動駕駛車輛可能會使用多達6-10個毫米波雷達。
但與此同時,傳統毫米波雷達的缺陷之一,低分辨率一直是困擾行業的關鍵瓶頸。但作為毫米波雷達芯片供應商,恩智浦相信,有一天毫米波雷達可以直接與激光雷達競爭。
而此次恩智浦的合作重點就是推動高分辨率成像雷達的量產開發。
一年前,恩智浦宣布全套雷達收發器完成了業界唯一基于BiCMOS和先進RFCMOS工藝技術的產品組合,基于S32R汽車雷達處理平臺幫助業內開發從小型緊湊型雷達傳感器到高分辨率成像雷達傳感應用。
這款基于12通道TX和16通道RX設計的高分辨率成像雷達方案,使用多個MR3003雷達收發器集成,提供高輸出功率、低噪聲和實現高分辨率成像所需的可擴展性。該雷達方案能夠同時跟蹤數千個目標,實時感知周圍環境,并達到L4和L5級自動駕駛的需求。
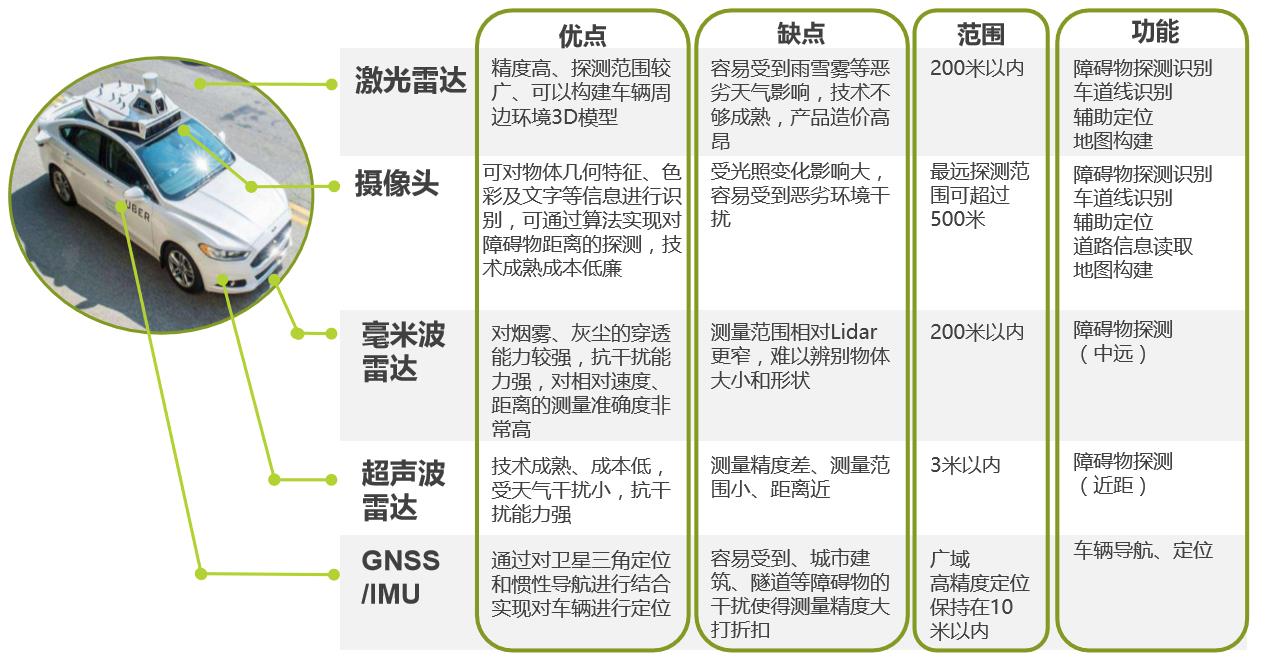
成像雷達被認為是將比其他傳感器更具成本和性能的綜合性價比優勢,在某些情況下,成像雷達有可能識別道路上的物體,如自行車、人或小體積障礙物。同時,兼具應對惡劣天氣狀況的傳統優勢,至少到目前為止,攝像頭、超聲波和激光雷達都做不到。
近年來,許多一級汽車零部件供應商、芯片制造商,包括一些初創公司,都在研發成像雷達技術。大多數人認為它的成本將是激光雷達的五分之一,有的企業甚至聲稱可以把成本做到目前量產77GHz雷達的水平。
恩智浦表示,該公司對這項技術的發展寄予厚望。該公司相關負責人甚至表示,“我們的目標是大幅改進毫米波雷達性能,最好不需要激光雷達。”
成像毫米波雷達,也被定義為4D(3D空間+速度)成像,通過將分辨率提升至接近激光雷達的水平,既解決對小物體的識別,以及移動、靜止物體的跟蹤,同時,毫米波雷達的穿透力(超視距能力)是對激光雷達的缺陷彌補。
而市面上已經量產的77GHz雷達,返回的是被測目標的抽象圖像,不能用于分類,比如確定他們是行人、騎自行車的人、動物、建筑物還是其他車輛。此外,對于靜止目標的探測也缺乏相應的能力。
同時,在與視覺融合方面,4D毫米波雷達具備天然優勢。點云毫米波雷達就可以把攝像頭的短板很好地補上,對周邊復雜環境可以3D實時建模,對行人車輛的精準距離和速度監測。
可見,成像雷達是唯一能在各種天氣和能見度條件下保持魯棒性,并在方位角和仰角上都能達到1度角分辨率(甚至在超分辨率算法下更低)的傳感器。
幾乎和恩智浦同一時間,德州儀器也推出了第一個高度集成的雷達傳感器芯片AWR1642。與競爭對手不同的是,德州儀器通過增加一個微控制器單元和一個數字信號處理器,在同一個系統芯片上集成了多個收發單元。
該公司通過將4個單芯片AWR1243雷達前端設備串聯起來,證明了它可以提供高達1.6度的角度分辨率,并可以檢測250米以上的車輛。
今年,德州儀器再次推出升級版AWR1843,有7個通道,包括4個接收器(Rx)和3個發射機(Tx),以及一個MCU,一個DSP,都集成在同一個芯片和天線上。此外,通過將MCU和DSP放在同一個芯片上,并在芯片的頂部安裝天線,大大減少PCB的占用空間,節省了近80%的空間。
而這種雷達的另一大應用場景,就是座艙內的人員及物體監控,如檢測乘客或司機的姿勢,甚至是手勢識別,而不需要基于攝像頭視覺(在歐美,攝像頭監控一直存在個人隱私的風險)。
以AWR1843單芯片雷達傳感器為例,通過安裝在車頂,可以準確檢測車內乘員,判斷乘員是成人還是兒童。同時,分類軟件可以輸出每個座位上的乘員位置,具有較高的精度。
現在,作為傳統雷達芯片巨頭的英飛凌,也決定殺入汽車級成像雷達市場。這也意味著距離規模量產的時間日益臨近。
幾周前,高分辨率成像雷達初創公司傲酷雷達(Oculii)宣布,和英飛凌合作開發雷達軟件解決方案,基于后者的AURIX MCUs、MMIC和電源硬件平臺的芯片組合,以及傲酷雷達的虛擬孔徑成像算法,以具有吸引力的價格提供高分辨率性能。
和大多數高分辨率雷達架構采用更多的物理天線和多芯片集成來提供更高的角度分辨率不同,傲酷雷達的專用虛擬孔徑成像算法通過相位編碼調制方案提高了陣列的角度分辨率,并基于更多的計算/內存實現更高的分辨率。
這意味著,該方案不需要更多的額外實體天線,因為這意味著更高的成本、尺寸和功率。傲酷雷達和英飛凌正在合作研發的解決方案,既可以為低成本的單芯片解決方案提供高性能優化,同時也可以量身定制多芯片高性能解決方案。
虛擬孔徑成像算法是一個陣列乘法器,使MIMO雷達傳感器的角度分辨率提高10倍以上,與現有的大規模量產的雷達相比,它可以提供低于1度的角分辨率。
這種方法的巨大優勢是在硬件成本上和傳統毫米波雷達類似的情況下,突破了角分辨率這個毫米波雷達最大的瓶頸,將催生出很多新的可能性。
比如,有了4D點云成像技術加持后,未來的前向雷達,在同等FOV情況下 ,可以達到0.1-0.2°角分辨率。同時,在探測距離300-400米時,也可以將車輛在哪個車道分辨清楚。
在英飛凌硅谷創新中心負責人看來,虛擬孔徑成像技術與汽車級雷達解決方案相結合,可以在不需要多個有源收發器或昂貴的天線技術的情況下提高角度分辨率。
在此之前,英飛凌曾為谷歌提供過一款60GHz雷達芯片,用于高分辨率手勢識別。谷歌則通過一種定制的機器學習模型來實現將數據轉換成所謂的“快速手勢識別”的能力。該芯片結合了調頻連續波雷達和直接序列擴頻雷達兩種調制方式。還有多個波束形成天線,支持3D跟蹤和成像。
目前,全球范圍主要有兩種點云成像雷達方案,一類是基于傳統NXP、TI的CMOS雷達芯片,采用多芯片及天線集成或者軟件虛擬方式來實現;另一類就是類似Arbe Robotics、Vayyar、SteradianSemi、RFISee等初創公司,直接提供成像雷達芯片。當然,還有一些企業利用超材料技術研發全新的雷達架構。
而成像雷達的下一步,就是提升機器學習的能力。
恩智浦在今年推出的一款車規級的AI工具包,除了應用于傳統的視覺領域,未來的雷達有望使用神經網絡根據其點云圖像對道路使用者及障礙物進行分類。
這意味著雷達內部的芯片集成度越來越多。恩智浦在RF-CMOS收發器中集成了MCU,邁出了第一步。同樣,德州儀器在集成DSP方面也走出了第一步,DSP能夠將機器學習置于邊緣側,對物體進行分類、跟蹤和計數成為可能。
同時,將DSP集成在一個組件中,與MCU和收發器相結合,可以減少互連損耗,加快處理速度。以IWR1642為例,DSP是一個600MHz的用戶可編程C674x DSP,還集成了一個200MHz的用戶可編程ARM Cortex-R4F處理器。
“過去因為雷達分辨率很低,你根本無法做任何與機器學習相關的后期處理。”一位行業人士表示,現在因為有了成像雷達,就有了基于機器學習來理解場景的能力。
初創公司Arbe從一開始就思考如何將信號處理和人工智能置于現成的射頻芯片組和數字信號處理器DSP之上,隨后他們自主研發了數字處理器和專用集成電路。
Arbe的專利,基于人工智能,后處理軟件堆棧包括一個基于雷達的同步定位和地圖(SLAM)解決方案的動力由人工智能。SLAM算法實現實時聚類、跟蹤、自定位、假目標濾波、基于雷達和基于雷達相機的目標分類。
這套人工智能算法可以識別被檢測到的對象是否是人,而不是樹,并且計算出它將在一秒內的位置,因為這對自動駕駛的決策有很大的影響。同時,還需要消除虛假目標。在最后一個階段,它還與攝像頭和套件中的其他傳感器融合,以對多個傳感器中的探測對象進行分類和匹配。
現在,毫米波雷達正在邁進高分辨率+智能時代。
在改進激光雷達和視覺方面,行業已經做出了很大的努力,特別是距離和分辨率方面已經達到了一個性能閾值。然而,像雷達這樣的其他傳感器,相對來說過去幾年并沒有太大的性能提升。
要知道,三年前,特斯拉還專門從德爾福挖來了雷達系統負責人,目的就是改善雷達性能,比如能否得到粗糙的點云。彼時,馬斯克的態度就已經很明確,雷達可以穿透雨、霧、雪和灰塵,是性價比最高的感知組合的選擇。
這位負責人在加盟特斯拉前的兩年時間參與了德爾福下一代雷達系統的開發。(不過,在特斯拉呆了兩年后,投奔了福特旗下的自動駕駛公司Argo AI)
毋庸置疑的是,下一代雷達仍將是汽車上最強勁、最可靠、性價比最高的傳感器之一。當然,我們更不能忽視華為基于5G技術的雷達殺進汽車行業。
而對于沒有跟上這一波毫米波雷達革新浪潮的企業,不管你是傳統巨頭還是初創公司(仍停留于對標傳統雷達,而沒有提前布局下一代技術),被淘汰出局是遲早的事。
要知道,接下來幾年時間,在感知硬件方面仍然有很多創新。同時,軟件定義汽車的概念,同樣在影響著傳統零部件的革新。













 工商網監
工商網監
評論