 電子發(fā)燒友App
電子發(fā)燒友App


8 月 25 日,由蓋世汽車主辦、中國智能網(wǎng)聯(lián)汽車產(chǎn)業(yè)創(chuàng)新聯(lián)盟自動(dòng)駕駛地圖與定位工作組協(xié)辦的“2020 第二屆自動(dòng)駕駛地圖與定位大會(huì)”隆重召開。本次會(huì)議主要聚焦高精地圖、高精度定位等自動(dòng)駕駛關(guān)鍵技術(shù),共探產(chǎn)業(yè)未來發(fā)展之路。下面是清華大學(xué)車輛與運(yùn)載學(xué)院青年教師、中國智能網(wǎng)聯(lián)汽車創(chuàng)新聯(lián)盟自動(dòng)駕駛地圖與定位工作組秘書長(zhǎng)江昆在本次論壇上的發(fā)言。
我分享的題目是關(guān)于自動(dòng)駕駛地圖的內(nèi)涵、延長(zhǎng)與標(biāo)準(zhǔn)的探討,在20年前大家都知道電子地圖是車載導(dǎo)航數(shù)據(jù)的基礎(chǔ),隨著車聯(lián)網(wǎng)的普及,我們知道電子地圖也是車聯(lián)網(wǎng)服務(wù)系統(tǒng)的關(guān)鍵環(huán)節(jié)。而現(xiàn)在,地圖再次成為我們整個(gè)行業(yè)關(guān)注的焦點(diǎn),其本質(zhì)原因是汽車對(duì)地圖的需求在不斷升級(jí),地圖的角色也由傳統(tǒng)的車載導(dǎo)航系統(tǒng)轉(zhuǎn)變?yōu)檐嚳叵到y(tǒng)的核心技術(shù)。
在不同級(jí)的自動(dòng)駕駛方案中,地圖都是一個(gè)核心的模塊,自動(dòng)駕駛等級(jí)越高,地圖的重要性就越不可替代。同時(shí),我們也可以發(fā)現(xiàn),自動(dòng)駕駛級(jí)別越高,對(duì)地圖的要求也越高。對(duì)于L4級(jí)別以上的自動(dòng)駕駛來說,一般認(rèn)為地圖是需要達(dá)到厘米級(jí)精度的。所以自動(dòng)駕駛地圖有一個(gè)非常形象的別名—“高精地圖”。
高精地圖的確很形象的描述他的主要特色,但是這里就引起了一個(gè)新的問題,也就是把研究者的注意力過度的聚焦在精度問題上。這里我們要問,高精度的地圖是不是就是自動(dòng)駕駛地圖呢?
我個(gè)人認(rèn)為,這個(gè)問題的本質(zhì)是在于理解自動(dòng)駕駛地圖的內(nèi)涵。自動(dòng)駕駛地圖的內(nèi)涵暫時(shí)沒有非常明確的定義。但是我這里提一個(gè)新的思路去探討這個(gè)問題,所謂自動(dòng)駕駛地圖的內(nèi)涵其實(shí)是在問自動(dòng)駕駛地圖應(yīng)該包含哪些有價(jià)值的信息。
在車載導(dǎo)航領(lǐng)域,當(dāng)我們提到自動(dòng)駕駛地圖時(shí),大家會(huì)想到高精度的路網(wǎng)地圖數(shù)據(jù),因?yàn)槁肪W(wǎng)是我們實(shí)現(xiàn)導(dǎo)航的一個(gè)基礎(chǔ)數(shù)據(jù)。高精度路網(wǎng)數(shù)據(jù)也的確是自動(dòng)駕駛地圖不可缺少的部分,相信所有做自動(dòng)駕駛地圖領(lǐng)域的專家們都認(rèn)可。但是除了路網(wǎng)這種基礎(chǔ)信息之外,還導(dǎo)航的興趣點(diǎn)POI信息,也是地圖里非常有價(jià)值的信息。除了興趣點(diǎn)信息之外,交通限制的信息也非常重要,做過貨車導(dǎo)航地圖的專家都知道,貨車導(dǎo)航地圖最有價(jià)值的信息是上面所存儲(chǔ)的交通限制的信息,包括限高、限行等,可以直接影響到貨運(yùn)的效率。
在衛(wèi)星測(cè)繪領(lǐng)域,提到自動(dòng)駕駛高精度地圖的時(shí)候,人們想到的是高精度的衛(wèi)星照片、地形地貌、高程信息等數(shù)據(jù)。這些數(shù)據(jù)在自動(dòng)駕駛地圖中是否需要存儲(chǔ)呢?怎么去利用呢,其實(shí)也是需要探討的研究點(diǎn)。
在智能交通領(lǐng)域,他們提到高精地圖時(shí),想到的是能否獲得更豐富的動(dòng)態(tài)交通信息,例如交通熱力圖,這樣的話有助于整個(gè)交通宏觀系統(tǒng)優(yōu)化的。另外就是拓?fù)溥B接圖,這可以反映出不同線路的邏輯關(guān)系,可以為后續(xù)自動(dòng)駕駛路線運(yùn)營規(guī)劃提供一個(gè)有利的信息。
在三維地圖領(lǐng)域,他們心目中的自動(dòng)駕駛地圖應(yīng)該有哪些信息呢?他們認(rèn)為應(yīng)該有高精度的環(huán)境三維重構(gòu)信息。這里又有不同的種類,一種是原始點(diǎn)云地圖,包含了非常多的原始數(shù)據(jù),但是它的缺點(diǎn)就是數(shù)據(jù)量過大。為了克服它數(shù)據(jù)量過大的缺點(diǎn),有人提出來我們可以提供矢量地圖,矢量地圖可以提供跟高精度地圖元素的矢量數(shù)據(jù),像是車道線和燈桿,一定程度可以重構(gòu)環(huán)境。
在環(huán)境感知領(lǐng)域,他們會(huì)關(guān)注特征點(diǎn)地圖和語義地圖。特征點(diǎn)地圖是環(huán)境的特征描述。,與之相對(duì)應(yīng)的就是語義地圖。隨著AI技術(shù)在感知領(lǐng)域的應(yīng)用,我們可以獲取到環(huán)境語義的分割,將語義的分割結(jié)果構(gòu)成一種語義的地圖,是環(huán)境感知領(lǐng)域非常迫切的需求。所以地圖從感知的角度是需要存儲(chǔ)像這種語義分割和特征點(diǎn)的信息。
在決策規(guī)劃領(lǐng)域,地圖也是經(jīng)常用于存儲(chǔ)非常有價(jià)值的信息,比如機(jī)器人領(lǐng)域做軌跡規(guī)劃常用的地圖--柵格地圖,這種地圖里面包含了很多的占用網(wǎng)格信息,能夠提供車輛所需要的可行駛區(qū)域信息。除了這種可行駛區(qū)域的信息之外,我們清華大學(xué)的王建強(qiáng)教授也提出了行車風(fēng)險(xiǎn)場(chǎng)的理論,這種風(fēng)險(xiǎn)場(chǎng)與地圖的結(jié)合可以用來進(jìn)行量化分析駕駛的風(fēng)險(xiǎn)。可見,地圖上也可以體現(xiàn)出重要的駕駛決策信息。
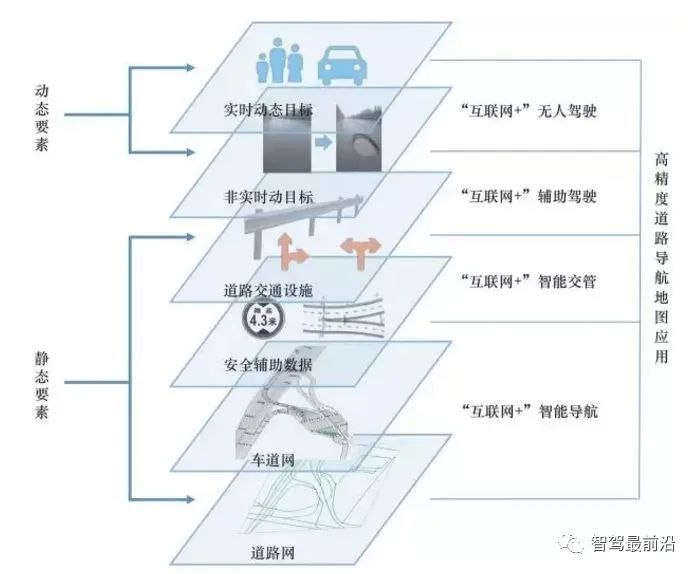
在列舉了不同領(lǐng)域?qū)ψ詣?dòng)駕駛地圖價(jià)值的理解之后,我希望大家能夠重新認(rèn)識(shí)一下自動(dòng)駕駛地圖。自動(dòng)駕駛地圖其實(shí)包含了四大基本特性。第一個(gè)是精確性,這可能是大家的第一反應(yīng)。自動(dòng)駕駛地圖與傳統(tǒng)地圖最明顯的區(qū)別就是在于對(duì)精確性的更高要求。除此之外,我們?nèi)ゲ粩嗟赝诰蜃詣?dòng)駕駛地圖的的內(nèi)涵,那就是它的第二個(gè)特性,豐富性。剛才的介紹里,也不斷的在說明這一現(xiàn)實(shí)。我們行業(yè)里面很多研究單位認(rèn)為地圖主要是一些地理信息的數(shù)據(jù),我覺得這個(gè)是一個(gè)誤區(qū),其實(shí)我們自動(dòng)駕駛地圖包含的內(nèi)涵非常廣。第三個(gè)特性是動(dòng)態(tài)性。傳統(tǒng)的地圖只是在考慮靜態(tài)的信息,對(duì)于自動(dòng)駕駛來說我們還需要考慮豐富的動(dòng)態(tài)信息,動(dòng)態(tài)包含兩個(gè)方面,一個(gè)是動(dòng)態(tài)障礙物信息,另外地圖本身是一個(gè)動(dòng)態(tài)更新的信息。動(dòng)態(tài)性也說明了地圖本身不僅是一種地理空間的信息,其實(shí)它也是一種時(shí)空信息,我們可以將地圖作為時(shí)空統(tǒng)一的基準(zhǔn)。第四點(diǎn)特性就是,自動(dòng)駕駛地圖與車輛的緊密結(jié)合。自動(dòng)駕駛地圖應(yīng)該全程參與自動(dòng)駕駛感知、決策、控制。
正是出于這樣的認(rèn)識(shí),我們提出了清華大學(xué)自動(dòng)駕駛地圖模型,這里再回顧一下,自動(dòng)駕駛地圖具有非常豐富的不同層次的數(shù)據(jù),這些數(shù)據(jù)對(duì)應(yīng)著不同的應(yīng)用,包括道路級(jí)路網(wǎng)層,宏觀交通信息層,道路-車道連接層,車道級(jí)路網(wǎng)層,地圖特征信息層,動(dòng)態(tài)感知容器層,智能決策支持層。
剛才探討了地圖應(yīng)該包含什么,地圖的內(nèi)涵。現(xiàn)在我們需要向外延伸,探討一下自動(dòng)駕駛地圖跟車輛如何去結(jié)合。在思考如何去結(jié)合的時(shí)候,我經(jīng)常會(huì)問自己一個(gè)問題,那就是自動(dòng)駕駛地圖只能是一種數(shù)據(jù)還是一種平臺(tái)?
清華大學(xué)楊殿閣課題組在這方面做了很多研究。我們的第一個(gè)感想是,自動(dòng)駕駛地圖其實(shí)本身是一種定位的平臺(tái)。對(duì)于傳統(tǒng)地圖來說,地圖是一種依賴于衛(wèi)星定位的,有了衛(wèi)星定位之后我們才能去使用地圖。而對(duì)于自動(dòng)駕駛地圖,地圖本身是可以主動(dòng)提供定位信息的。這里介紹一下我們的技術(shù)方案,就是用單目相機(jī)與適量地圖進(jìn)行匹配。相機(jī)可以識(shí)別到相應(yīng)的矢量信息,定位的過程就是不斷地去移動(dòng)相機(jī)的位置,使得所檢測(cè)出來的地圖元素,與地圖數(shù)據(jù)進(jìn)行重疊。因?yàn)槲覀兪切枰x擇相應(yīng)的特征進(jìn)行匹配定位的,這里就有一個(gè)疑問,什么樣的特征是能夠有助于我們地圖的定位呢?我們分成了三類定位特征,一種是垂向的特征,這種主要就是燈桿等數(shù)據(jù),一種是水平線的特征,如車道線等,還有就是路牌這種點(diǎn)狀特征。我們對(duì)不同的特征進(jìn)行了分析,可以發(fā)現(xiàn)垂向特征主要約束相機(jī)橫向、前后運(yùn)動(dòng),水平線特征主要約束橫向和鉛垂運(yùn)動(dòng),點(diǎn)狀特征是對(duì)各方向均有約束。 然而自動(dòng)駕駛車輛在真實(shí)環(huán)境中行駛的時(shí)候,環(huán)境中沒有足夠多的特征會(huì)導(dǎo)致定位方法的失效。那么如何解決這個(gè)問題呢?這我們提出了一個(gè)定位優(yōu)化的技術(shù)路線,我們主要有兩個(gè)優(yōu)化的方法。一個(gè)是使用了多幀約束和幀間約束融合方式來提高我們定位的數(shù)量,如果1幀數(shù)據(jù)里特征數(shù)量比較少,但是如果我們有20幀的話,特征的數(shù)量就會(huì)增加,可以提高我們的定位精度和準(zhǔn)確性。另外就是我們使用了視覺本身的特征點(diǎn)約束,也是視覺slam技術(shù)。這是我們?cè)诒本┏菂^(qū)道路進(jìn)行的實(shí)車定位實(shí)驗(yàn),在視頻里面我們可以看到,我們能夠準(zhǔn)確地檢測(cè)出地面橫向的特征以及燈桿這種縱向的特征,這些特征可以跟矢量地圖對(duì)比匹配。在這個(gè)實(shí)驗(yàn)里面我們實(shí)現(xiàn)了10厘米級(jí)別的定位,
除了定位平臺(tái)以外,我們的第二個(gè)觀點(diǎn)是,地圖其實(shí)也是一種協(xié)同感知平臺(tái),大家知道智能網(wǎng)聯(lián)車聯(lián)網(wǎng)自動(dòng)駕駛有兩大技術(shù)路線之爭(zhēng),一種是自主式的智能汽車,傳感器要求很高,依靠自主的感知能力去實(shí)現(xiàn)自動(dòng)駕駛。這種方式的缺點(diǎn)就是單車成本高。另外一種就是網(wǎng)聯(lián)式的智能汽車,通過他車和路測(cè)傳感器多種方式進(jìn)行協(xié)同式感知,從而實(shí)現(xiàn)自動(dòng)駕駛。這種方式下我們需要多車協(xié)同,這樣就能夠減少對(duì)單車成本的需求,減少單車的成本。通俗來講,其實(shí)自主式的智能汽車就是需要每個(gè)車都是諸葛亮。而對(duì)于網(wǎng)聯(lián)式的智能汽車來說,我們不需要每個(gè)車都很強(qiáng),在車路協(xié)同和多車協(xié)同之后,我們會(huì)實(shí)現(xiàn)三個(gè)臭皮匠頂三個(gè)諸葛亮。實(shí)現(xiàn)這樣一種場(chǎng)景的意義在于什么呢?在于降低自動(dòng)駕駛對(duì)車輛硬件的需求,可以更快地去推動(dòng)我們自動(dòng)駕駛產(chǎn)業(yè)化的落地,而自動(dòng)駕駛地圖在這個(gè)環(huán)節(jié)里面就是一個(gè)非常重要的平臺(tái),它是實(shí)現(xiàn)多車協(xié)同感知的重要平臺(tái)。基本的思路如下,我們的地圖提供穩(wěn)定的坐標(biāo)基準(zhǔn),實(shí)現(xiàn)超數(shù)據(jù)、超基準(zhǔn)的融合。雖然每輛車的精度較低,但是以地圖為信息融合平臺(tái)的話,就可以借助地圖的先驗(yàn)信息反向去提升我們車輛的感知能力。這里簡(jiǎn)要介紹一下我們做的幾個(gè)實(shí)驗(yàn)。實(shí)驗(yàn)1是超視距盲區(qū)消除實(shí)驗(yàn),我們的黃車是自車,這輛車是網(wǎng)聯(lián)車輛,灰色的車是障礙物,在正常情況下是無法感知到相應(yīng)信息。通過以地圖為感知容器的方式,我們就可以將多車的感知信息通過地圖進(jìn)行融合,消除盲區(qū)。實(shí)驗(yàn)2是有遮擋的情況,自車是無法觀察到前車前方的車輛,但是有了地圖感知容器和時(shí)空基準(zhǔn)之后就可以獲取到被遮擋這輛車的信息。實(shí)驗(yàn)3是關(guān)于感知精度的提升實(shí)驗(yàn),這個(gè)實(shí)驗(yàn)最有意思,驗(yàn)證了我剛才提到的概念。每輛車自身的感知精度是比較低的,但是因?yàn)橛辛俗詣?dòng)駕駛地圖感知平臺(tái)之后,每輛車的感知能力提升,這樣就達(dá)到了三個(gè)臭皮匠頂三個(gè)諸葛亮的效果,大大降低了自動(dòng)駕駛的成本。
最后我再講一下我的第三個(gè)觀點(diǎn),自動(dòng)駕駛地圖是一種軟件平臺(tái)。為了實(shí)現(xiàn)上述這些功能,自動(dòng)駕駛地圖的定位平臺(tái)和感知平臺(tái),我們是需要開發(fā)一套軟件平臺(tái)。我們需要將它進(jìn)行一個(gè)模塊化的設(shè)計(jì),它包含我們自動(dòng)駕駛的底層操作系統(tǒng),包括中間件,以及功能模塊。在我們PC操作系統(tǒng)的時(shí)代,我們知道操作系統(tǒng)最大的特色是窗口式管理,在手機(jī)端時(shí)代,它的特色是觸屏交互方式,而在自動(dòng)駕駛操作系統(tǒng)時(shí)代,我個(gè)人的觀點(diǎn)在車載操作系統(tǒng)將會(huì)以地圖為核心來構(gòu)建。這里也簡(jiǎn)單介紹一下我們目前在車載自動(dòng)駕駛軟件平臺(tái)上的一些工作。目前我們已經(jīng)實(shí)現(xiàn)了將所有的功能模塊進(jìn)行了劃分,模塊劃分之后必要的工作就是高效、低時(shí)延的新通信機(jī)制,這里我們也對(duì)比了ROS,構(gòu)建了一種高效的通信機(jī)制。
以上就是我關(guān)于自動(dòng)駕駛地圖內(nèi)涵和外延的思考,關(guān)于內(nèi)涵我想強(qiáng)調(diào)自動(dòng)駕駛地圖的數(shù)據(jù),大家不要只看到高精度,而應(yīng)該考慮更豐富的內(nèi)涵。歡迎各個(gè)領(lǐng)域的行業(yè)專家都能參與進(jìn)來。關(guān)于自動(dòng)駕駛地圖的外延,希望大家能夠關(guān)注到地圖的平臺(tái)特性,它可以是定位平臺(tái),是協(xié)同感知平臺(tái),同時(shí)是我們動(dòng)駕駛軟件平臺(tái)。這樣的話,我們就能將地圖與自動(dòng)駕駛緊密結(jié)合起來。
最后,我再簡(jiǎn)單介紹一下我們自動(dòng)駕駛地圖標(biāo)準(zhǔn)的情況。我們自動(dòng)駕駛地圖與定位工作組是在2018年成立的,有楊殿閣老師作為組長(zhǎng)。為了推進(jìn)我國自動(dòng)駕駛地圖標(biāo)準(zhǔn)的建立,促進(jìn)我們自動(dòng)駕駛地圖行業(yè)更緊密結(jié)合。目前我們工作組已經(jīng)有近百家單位,近期也馬上有工作組的再擴(kuò)大工作會(huì)議,有新成員的加入。
目前我們工作組的一個(gè)工作主要方向就是將自動(dòng)駕駛與地圖結(jié)合相關(guān)的技術(shù)進(jìn)行一個(gè)規(guī)范化的整理,形成一系列的標(biāo)準(zhǔn),未來也將會(huì)跟國際上一些地圖的標(biāo)準(zhǔn)組織進(jìn)行一個(gè)交流,實(shí)現(xiàn)我們中國的地圖數(shù)據(jù)與國際地圖數(shù)據(jù)的交互與互換。
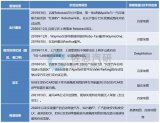
目前我們自動(dòng)駕駛地圖工作組已經(jīng)起草了6項(xiàng)標(biāo)準(zhǔn)。
第一個(gè)是自動(dòng)駕駛高精度地圖特征定位數(shù)據(jù)技術(shù)規(guī)程。
第二個(gè)是自動(dòng)駕駛地圖采集要素模型與交換格式。
第三個(gè)是自動(dòng)駕駛地圖動(dòng)調(diào)信息數(shù)據(jù)交換格式。
第四個(gè)是自動(dòng)駕駛路側(cè)傳感器數(shù)據(jù)交換格式。
第五個(gè)是基于衛(wèi)星地基增強(qiáng)的車輛定位技術(shù)要求。
第六個(gè)是關(guān)于自動(dòng)駕駛路側(cè)感知定位技術(shù)條件的。
現(xiàn)在這6項(xiàng)標(biāo)準(zhǔn)正在穩(wěn)步推進(jìn)中,希望各位專家都能夠多給一些寶貴的意見。
今天我的匯報(bào)就到這里,我非常愿意跟大家進(jìn)行討論,大家可以通過我的郵箱和微信發(fā)送寶貴意見,感謝!
? ? ? 責(zé)任編輯:tzh






















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論