 電子發(fā)燒友App
電子發(fā)燒友App


基于飛思卡爾HCS08的汽車ECAS設(shè)計(jì)
摘要:設(shè)計(jì)了一種以飛思卡爾MC9S08GB60 單片機(jī)為控制核心的汽車電控空氣懸架系
統(tǒng)。著重闡述了其硬件電路系統(tǒng)和具體電路設(shè)計(jì),并對(duì)軟件設(shè)計(jì)要點(diǎn)進(jìn)行了介紹。通過(guò)在實(shí)
驗(yàn)室進(jìn)行臺(tái)架測(cè)試,驗(yàn)證了本系統(tǒng)相對(duì)于被動(dòng)懸架系統(tǒng)有效的改善了懸架動(dòng)行程,車輪動(dòng)載
荷及車身垂直加速度三項(xiàng)重要指標(biāo),在實(shí)現(xiàn)車身高度調(diào)節(jié)控制的同時(shí)改善了車輛乘坐的舒適
型。且電路結(jié)構(gòu)簡(jiǎn)單,穩(wěn)定性好,有實(shí)用應(yīng)用的價(jià)值。
關(guān)鍵詞:MC9S08GB60 電子控制單元空氣懸架
Design of the Vehicle’s Electronically controlled air suspension system Based on Freescale HCS08 QuanLi 1 XiePing1 BaiLu2 (1.Jiang Su University, Institute of Electric Engineering, JIANG SU ZHEN JIANG 212013
2. HEBI technical school HENAN HEBI 458000)
Abstract:The Vehicle’s electronically controlled air suspension system were designed, which
use a microcontroller Freescale MC9S08GB60.Emphasizes the circuit of the hardware system,meanwhile, introduces the key point on the software design. The bench test in laboratory certified that the ECAS relative passivity-suspension , it improved three impotent index arm effectively,which are suspension’s moving distance, acceleration in vertical and the cartwheel moving loading.it improve the vehicle’s ride comfortable when controlling the ride height. The system is simple structure , stability and practical.
Keywords:MC9S08GB60 ECU Air Suspension
0 引言
空氣懸架主要有被動(dòng)懸架和可控電子懸架。被動(dòng)懸架一定程度上抑制和降低了車體和車
輪的動(dòng)載和振動(dòng),保證了車輛行駛安全性和乘坐舒適型。但由于被動(dòng)懸架的剛度和阻尼系數(shù)
一般按經(jīng)驗(yàn)選取,只在特定環(huán)境下是最優(yōu),而一旦載荷,路況,速度等因素發(fā)生變化,被動(dòng)
懸架不能隨之而自動(dòng)調(diào)節(jié),更不能手動(dòng)調(diào)節(jié)。為了克服這一缺陷,電子空氣懸架系統(tǒng)(ECAS)
由此產(chǎn)生。ECAS 是目前最先進(jìn)的汽車懸架系統(tǒng),它可以隨著路況,載荷,速度等變化因子
自動(dòng)調(diào)節(jié)懸架剛度,車身高度,減少了空氣消耗,且具有反應(yīng)迅速,安裝容易,操作簡(jiǎn)單等
優(yōu)點(diǎn),因此可控電子懸架已經(jīng)成為汽車電子領(lǐng)域研究的一個(gè)熱門課題,其有著廣闊的發(fā)展前
景。
1 ECAS 的組成及原理
電控空氣懸架系統(tǒng)由電子控制單元(ECU),高度傳感器、空氣彈簧、速度傳感器、減震
器,車高升降控制鍵盤等組成。ECU 通過(guò)高度傳感器實(shí)時(shí)檢測(cè)車身高度,間接獲得車身垂直
加速度,同時(shí)通過(guò)速度傳感器檢測(cè)車輛行駛速度。ECU 內(nèi)保存若干指標(biāo)高度和三級(jí)可調(diào)阻尼
值,指標(biāo)高度與彈簧的舒適性、駕駛安全性和與應(yīng)用規(guī)范保持一致。車速在不同的行駛條件
下由ECU 自動(dòng)執(zhí)行相應(yīng)的指標(biāo)高度,也可由駕駛員手動(dòng)控制高度和阻尼值。通過(guò)比較高度傳
感器檢測(cè)結(jié)果和指標(biāo)高度,若高度差超過(guò)了一定的公差范圍,電磁閥就會(huì)被激發(fā),通過(guò)充放氣將實(shí)際高度調(diào)整到指標(biāo)高度。減震器阻尼力共三檔,根據(jù)車身上升速度、加速度控制減震
器,執(zhí)行相應(yīng)的阻尼力,從而滿足汽車行駛平順性和乘坐舒適型的要求。電控空氣懸架組成
結(jié)構(gòu)如圖一。
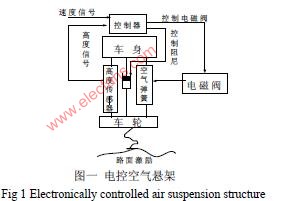
Fig 1 Electronically controlled air suspension structure
2 ECAS 系統(tǒng)各功能模塊的設(shè)計(jì)
ECAS 主要由6 大功能模塊組成,分別是中央處理單元,信號(hào)輸入模塊(即傳感器信號(hào)),
信號(hào)輸出模塊(即控制量的輸出),操作界面模塊,電源模塊,其他模塊(外接存儲(chǔ)器,RS485
通信,系統(tǒng)的升級(jí)擴(kuò)展端口)。
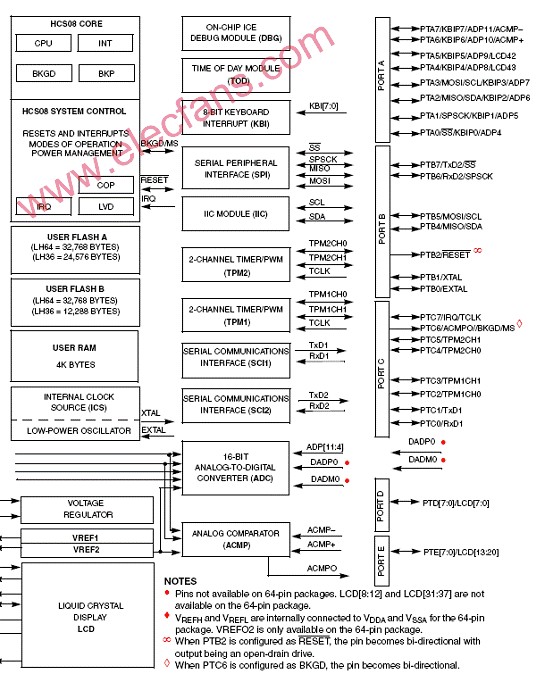
2.1 MC9S08GB60
單片機(jī)是ECU 的核心部件, 它要經(jīng)常處理大量的輸入和輸出信號(hào), 而且要實(shí)現(xiàn)高精度
和實(shí)時(shí)控制。本設(shè)計(jì)采用了美國(guó)飛思卡爾公司的加強(qiáng)型8 位車用微控制器——MC9S08GB60
單片機(jī)。該單片機(jī)內(nèi)有64K flash 和4K 的E2PROM,高度集成了四個(gè)串行通信端口
(SCI1,SCI2,SPI,I2C) ,最多達(dá)8 個(gè)定時(shí)器(PWM),8 通道的10 位A/D 轉(zhuǎn)換模塊。
2.2 信號(hào)傳感輸入模塊
該模塊主要由3 個(gè)高度傳感器和1 個(gè)速度傳感器構(gòu)成。車身高度傳感器等效電感串聯(lián)
電阻。等效電感0°轉(zhuǎn)角時(shí)對(duì)應(yīng)約20mH,-45°轉(zhuǎn)角時(shí)對(duì)應(yīng)約8mH,+45°轉(zhuǎn)角時(shí)對(duì)應(yīng)約35mH。
等效電阻120Ω。為此設(shè)計(jì)了LC 三點(diǎn)式振蕩電路來(lái)檢測(cè)車身高度傳感器傳來(lái)的信號(hào),即設(shè)
計(jì)一個(gè)正弦波發(fā)生器,由TL082 元件及外圍電路構(gòu)成,正弦波的頻率隨高度傳感器等效電感
的變化而不斷變化,而后經(jīng)比較器出來(lái)一個(gè)頻率隨電感不斷變化的方波,經(jīng)三極管放大和光
耦隔離后輸入到MCU 的輸入捕捉端口。MCU 通過(guò)檢測(cè)這一不斷變化的頻率來(lái)實(shí)現(xiàn)對(duì)高度傳感
器傳來(lái)信號(hào)的檢測(cè)。電路如圖二所示,對(duì)速度傳感器信號(hào)的檢測(cè)也是通過(guò)檢測(cè)其頻率實(shí)現(xiàn)的,
原理同高度傳感輸入電路類似。
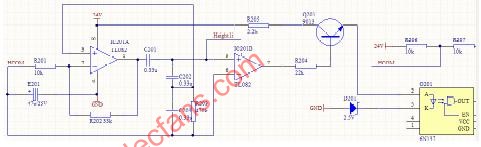
圖二 車身高度檢測(cè)電路
Fig 2 detection circuit of vehicle’s height
2.3 信號(hào)控制輸出模塊
ECU 采用PWM 方式輸出控制電磁閥的開(kāi)啟,根據(jù)當(dāng)前實(shí)際高度與預(yù)期調(diào)節(jié)高度的偏差
來(lái)輸出控制信號(hào)。ECU 計(jì)算電磁閥的調(diào)節(jié)脈沖長(zhǎng)度,如果需要調(diào)節(jié)的高度量大、由于沒(méi)有過(guò)
沖危險(xiǎn),ECU 將給出一個(gè)長(zhǎng)的脈沖,同時(shí),快的上升速度將減小脈沖長(zhǎng)度,這樣就能精確控
制車輛的高度調(diào)節(jié)速度,極大的避免了高度的過(guò)沖及振蕩調(diào)節(jié).對(duì)于電磁閥的驅(qū)動(dòng),本設(shè)計(jì)
選用了安森美半導(dǎo)體公司生產(chǎn)的NUD3124 繼電器驅(qū)動(dòng)芯片。NUD3124(汽車版本)器件的高
反向雪崩能量容量(350mJ)可以控制大多數(shù)用于汽車應(yīng)用的繼電器。控制信號(hào)經(jīng)過(guò)光耦隔離
后輸出給NUD3124 驅(qū)動(dòng)芯片,由NUD3124 驅(qū)動(dòng)電磁閥工作,并在NUD3124 的輸出端加了
一個(gè)二極管保護(hù)電路。
2.4 電源模塊,操作界面模塊及其他擴(kuò)展功能模塊
ECAS 系統(tǒng)主要有兩種電壓源,一是24V 電壓源,二是3V 電壓源。其中3V 電壓源分?jǐn)?shù)
字電壓源和模擬電壓源。24V 電源是由車輛自身電源引出,然后經(jīng)π 型濾波,再經(jīng)穩(wěn)壓管穩(wěn)
壓,在經(jīng)過(guò)一個(gè)濾波電路最終得到一個(gè)穩(wěn)定的24V 電壓源。3V 電壓源與此類似,只是須要
在數(shù)字電源和模擬電源之間加上一個(gè)隔離電阻,以防串?dāng)_。
操作界面主要是鍵盤輸入和發(fā)光二極管顯示。當(dāng)司機(jī)要手動(dòng)控制阻尼和車高的時(shí)候,便
可通過(guò)鍵盤輸入其操作,然后相應(yīng)的發(fā)光二極管亮,顯示其輸入。鍵盤輸入經(jīng)過(guò)了濾波,光
耦隔離和IC106 濾波及保護(hù),最終送入ECU,然后ECU 輸出控制驅(qū)動(dòng)相應(yīng)發(fā)光二極管點(diǎn)亮。
其他模塊主要包括便于日后升級(jí)的接口,以及RS485 通信,大容量存儲(chǔ)器等。大容量存
儲(chǔ)器采用了ATMAL 公司的AT24C1024,其通過(guò)PTC2/SDA 和PTC3/SCL 與單片機(jī)相連;RS485
用典型接法即可,芯片采用max3485;其他未用引腳均通過(guò)插槽引出,以便于日后升級(jí)之用。
3 汽車ECAS的軟件設(shè)計(jì)方案
空氣懸架電子控制單元(ECAS)應(yīng)用軟件由系統(tǒng)初始化模塊、判斷手動(dòng)自動(dòng)調(diào)高模塊、
信號(hào)采集模塊,鍵盤響應(yīng)模塊,輸出控制模塊等構(gòu)成。主程序?yàn)橐谎h(huán)體,它擔(dān)負(fù)調(diào)節(jié)車身
高度和阻尼的任務(wù),車身高度信號(hào)經(jīng)傳感器轉(zhuǎn)換為具有一定占空比的方波信號(hào),然后經(jīng)過(guò)與
微處理器中預(yù)設(shè)的標(biāo)定高度進(jìn)行比較,輸出控制信號(hào),當(dāng)快達(dá)到標(biāo)定高度時(shí),減小輸出信號(hào)
的占空比,以防止過(guò)充。具體主程序框圖如圖三所示。
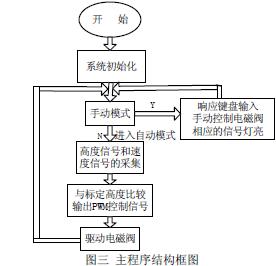
Fig 3 the structured flowchart of main program
4 試驗(yàn)及結(jié)果分析
本設(shè)計(jì)做了兩自由度1/4 車輛空氣懸架試驗(yàn),通過(guò)在一定頻率特性下,對(duì)比分析電控空
氣懸架和被動(dòng)空氣懸架在相同的路面激勵(lì)下,得到不同的懸架動(dòng)行程,車輛動(dòng)載荷及垂直加
速度,來(lái)驗(yàn)證本設(shè)計(jì)的可行性[4],驗(yàn)證本設(shè)計(jì)是否達(dá)到了提高車輛行駛平順性和乘坐舒適型
的目的。為下一步將科研成果轉(zhuǎn)換成汽車電子產(chǎn)品提供技術(shù)儲(chǔ)備和試驗(yàn)手段。
本試驗(yàn)系統(tǒng)用到了美國(guó) INSTRON 公司8800 數(shù)控液壓伺服振動(dòng)測(cè)試系統(tǒng)、空氣彈簧、減
振器、本文設(shè)計(jì)的控制器、加速度傳感器、車身高度傳感器、速度傳感器,Wavebook 信號(hào)
采集器、電腦等。試驗(yàn)原理如圖四所示.試驗(yàn)系統(tǒng)上多加了兩個(gè)傳感器,分別是加速度傳感
器和壓力傳感器,加這兩個(gè)傳感器是為了測(cè)出簧上垂直加速度和輪胎動(dòng)載荷。本試驗(yàn)過(guò)程中
激勵(lì)信號(hào)采用模擬B 級(jí)路面、車速50km/h 的白噪聲隨機(jī)輸入信號(hào),試驗(yàn)時(shí)間30s,采樣間
隔0.01s,空氣彈簧工作高度275mm,分別采集空氣懸架加控制器前、后的簧上質(zhì)量垂直振
動(dòng)加速度,懸架動(dòng)行程和輪胎動(dòng)載荷。實(shí)驗(yàn)結(jié)果如圖五所示,通過(guò)本實(shí)驗(yàn)我們可以看出用本
文所設(shè)計(jì)的電控空氣懸架系統(tǒng)明顯在懸架動(dòng)行程,車輛動(dòng)載荷和垂直加速度三項(xiàng)指標(biāo)上都比
被動(dòng)懸架有明顯的改善,其中簧上質(zhì)量垂直振動(dòng)加速度的均方根值下降了12.89%說(shuō)明本文
所設(shè)計(jì)的控制器有效地改善了車輪的行駛平順性,得到了較好的懸架特性,有實(shí)際應(yīng)用的價(jià)值!
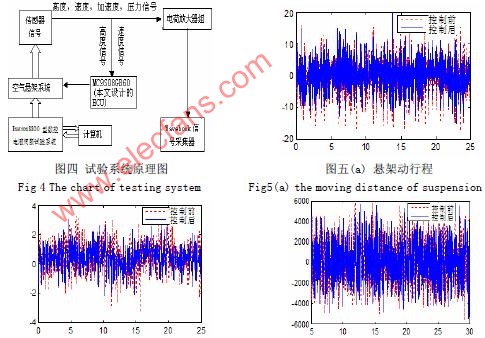
圖五(b) 垂直加速度 圖五(c) 車輪動(dòng)載荷
Fig5(b) acceleration signal in vertical vibration Fig 5(c) cartwheel moving loading










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論