軟件平臺(tái) PXI-1045 機(jī)箱 PXI-8108 嵌入式控制器 PXI-8464/2 CAN 通訊模塊 概述: 進(jìn)入21 世紀(jì)以來(lái),商用車(chē)CAN 總線(xiàn)網(wǎng)絡(luò)的應(yīng)用得到了異常迅猛的發(fā)展。現(xiàn)今
2019-04-08 09:42:13
CAN 通訊實(shí)驗(yàn)CAN 介紹CAN 總線(xiàn)介紹CAN 是Controller Area Network 的縮寫(xiě)(以下稱(chēng)為CAN),中文意思是控制器局域網(wǎng)絡(luò),是ISO 國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。在
2021-08-05 06:54:40
CAN總線(xiàn)的技術(shù)特點(diǎn)車(chē)身系統(tǒng)的CAN控制設(shè)計(jì)車(chē)身控制模塊中的CAN應(yīng)用層協(xié)議
2021-05-14 06:26:10
屬于現(xiàn)場(chǎng)總線(xiàn)的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。在這個(gè)網(wǎng)絡(luò)中的各種硬件設(shè)備之間不可避免的需要實(shí)現(xiàn)數(shù)據(jù)傳輸,以實(shí)現(xiàn)產(chǎn)品的功用。適應(yīng)技術(shù)具體要求,CAN總線(xiàn)透明傳輸通訊模塊誕生
2011-09-24 11:57:56
第40章 CAN—通訊實(shí)驗(yàn)全套200集視頻教程和1000頁(yè)P(yáng)DF教程請(qǐng)到秉火論壇下載:野火視頻教程優(yōu)酷觀看網(wǎng)址本章參考資料:《STM32F4xx 中文參考手冊(cè)2》、《STM32F4xx規(guī)格書(shū)》、庫(kù)幫助文檔《stm32f4xx_dsp_stdperiph_lib_...
2021-08-20 06:24:07
我家的電動(dòng)車(chē)充電器充不上點(diǎn)了。。。。。插在電動(dòng)車(chē)上就顯示充滿(mǎn)狀態(tài),但是電動(dòng)車(chē)沒(méi)電了。。。 這到底是怎么回事??充電器上的公頭和電動(dòng)車(chē)的母頭接觸良好。。。充電器輸出也有50V左右的電壓但就是充不上電 一直顯示綠燈(未充電狀態(tài)),這道底是咋回事啊在線(xiàn)等留下QQ504546386知道的告訴我一下
2012-01-20 09:15:49
如何制作一個(gè)電動(dòng)車(chē)用的密碼啟動(dòng)面板,輸入密碼電動(dòng)車(chē)自動(dòng)通電,手動(dòng)按斷電按鈕,電動(dòng)車(chē)自動(dòng)斷電。這樣就不需要電動(dòng)車(chē)鑰匙了。我百度了電動(dòng)車(chē)鑰匙原理,很簡(jiǎn)單的物理原理,感覺(jué)可行性可以,有沒(méi)有大師指導(dǎo)一下具體步驟
2022-05-25 13:49:29
、鎳氫電池或鋰電子電池)提供動(dòng)力源,以電動(dòng)機(jī)為驅(qū)動(dòng)系統(tǒng)的汽車(chē)。其主要?jiǎng)恿ο到y(tǒng)由動(dòng)力電池、驅(qū)動(dòng)電機(jī)組成,從電網(wǎng)取電或更換蓄電池獲得電能。電動(dòng)車(chē)結(jié)構(gòu)傳統(tǒng)內(nèi)燃機(jī)車(chē)主要由發(fā)動(dòng)機(jī)、車(chē)身、底盤(pán)、電氣設(shè)備等四大
2021-06-30 06:17:50
電動(dòng)機(jī)為驅(qū)動(dòng)系統(tǒng)的汽車(chē)。其主要?jiǎng)恿ο到y(tǒng)由動(dòng)力電池、驅(qū)動(dòng)電機(jī)組成,從電網(wǎng)取電或更換蓄電池獲得電能。電動(dòng)車(chē)結(jié)構(gòu)傳統(tǒng)內(nèi)燃機(jī)車(chē)主要由發(fā)動(dòng)機(jī)、車(chē)身、底盤(pán)、電氣設(shè)備等四大部分組成;純電動(dòng)車(chē)主要由電力驅(qū)動(dòng)...
2021-06-30 06:14:17
又稱(chēng)電動(dòng)車(chē)GPS防盜器是專(zhuān)門(mén)設(shè)計(jì)給電動(dòng)車(chē)摩托車(chē)使用的GPS防盜報(bào)警跟蹤器,產(chǎn)品形式表現(xiàn)多樣,分安裝型及免安裝型,其隱蔽性強(qiáng),安全性高,全天候工作,它能在盜竊團(tuán)伙對(duì)車(chē)輛盜竊實(shí)施過(guò)程中時(shí)及時(shí)給車(chē)主報(bào)警提醒,在車(chē)輛被盜后,能追回被盜車(chē)輛,并捉拿罪犯,深得廣大電動(dòng)車(chē),摩托車(chē)車(chē)主的厚愛(ài)。
2019-09-24 09:14:03
關(guān)門(mén),讓電梯處于停止運(yùn)行狀態(tài),有效監(jiān)控電動(dòng)車(chē)入梯行為,消除消防隱患,實(shí)現(xiàn)對(duì)電動(dòng)車(chē)禁止進(jìn)入電梯的安全管理。市面上電動(dòng)車(chē)阻車(chē)系統(tǒng)眾多,其中電動(dòng)車(chē)阻車(chē)系統(tǒng),電動(dòng)車(chē)識(shí)別準(zhǔn)確率超過(guò)99%,不僅能識(shí)別市面上常見(jiàn)
2023-04-04 15:49:28
不講原理(網(wǎng)上詳細(xì)講原理的有很多),只講其代碼實(shí)現(xiàn)。對(duì)于單片機(jī)使用者來(lái)說(shuō),IIC總線(xiàn)通訊實(shí)現(xiàn)具體分兩種,一種是硬件實(shí)現(xiàn),另一種是軟件模擬,硬件實(shí)現(xiàn)相對(duì)簡(jiǎn)單,一般芯片數(shù)據(jù)手冊(cè)會(huì)提供官方例程,只需要配置
2021-12-09 06:14:02
在汽車(chē)車(chē)身網(wǎng)絡(luò),通信速率越低抗干擾能力越強(qiáng)。因此LIN總線(xiàn)在BCM車(chē)身網(wǎng)絡(luò)中經(jīng)常用于控制一些開(kāi)關(guān)、車(chē)窗、車(chē)門(mén)、后視鏡等。如下圖所示LIN的最新協(xié)議標(biāo)準(zhǔn)ISO17987LIN的接口有兩部分組成:SCI協(xié)議控制器、LIN驅(qū)動(dòng)器。LIN的一些特性:
2019-05-31 07:19:40
本帖最后由 一只耳朵怪 于 2018-6-21 16:22 編輯
MH-T671AT1低速電動(dòng)車(chē)車(chē)規(guī)級(jí)中控(iMX6Q+7寸) New隨著國(guó)家對(duì)節(jié)能環(huán)保型經(jīng)濟(jì)的提出,電動(dòng)汽車(chē)市場(chǎng)2015年進(jìn)入
2018-06-21 13:51:38
STM32-CAN通訊實(shí)驗(yàn)1、CAN簡(jiǎn)介CAN協(xié)議特點(diǎn):1、 多主控制2、系統(tǒng)柔軟性3、通信速度快、通訊距離遠(yuǎn)4、具有錯(cuò)誤檢測(cè)、錯(cuò)誤通知和錯(cuò)誤恢復(fù)功能5、故障封閉功能6、連接節(jié)點(diǎn)多CAN協(xié)議的五種幀
2021-08-05 06:33:19
項(xiàng)目名稱(chēng):電動(dòng)車(chē)車(chē)載導(dǎo)航試用計(jì)劃:1 電動(dòng)車(chē)普遍采用48V鉛酸電池供電2 導(dǎo)航模塊適用3.3V電壓供電,需要比較純凈一些的電源。
2019-11-28 17:42:34
汽車(chē)車(chē)身視覺(jué)檢測(cè)站是用于測(cè)量車(chē)身關(guān)鍵點(diǎn)的三維空間坐標(biāo)的大型的專(zhuān)用檢測(cè)系統(tǒng)。它由機(jī)械及定位系統(tǒng)、三維視覺(jué)傳感器系統(tǒng)、測(cè)量控制與接口系統(tǒng)、標(biāo)定系統(tǒng)以及計(jì)算機(jī)軟件五大部分組成。
2019-10-08 11:43:47
基于CAN總線(xiàn)的汽車(chē)車(chē)窗防夾系統(tǒng).rar
2018-07-19 04:14:49
如何實(shí)現(xiàn)電動(dòng)車(chē)防盜鎖浪涌設(shè)計(jì)?
2022-01-14 07:34:18
CAN協(xié)議是通過(guò)哪幾種類(lèi)型的幀進(jìn)行的?如何對(duì)基于stm32f103zet6的CAN與上位機(jī)進(jìn)行通訊實(shí)驗(yàn)?
2021-11-09 07:22:43
如何解決電動(dòng)車(chē)的充電管理問(wèn)題?電動(dòng)車(chē)智能充電系統(tǒng)網(wǎng)絡(luò)拓?fù)溆赡膸撞糠纸M成?采用LoRa通訊的好處是什么?為什么選用ZM470SX LoRa通訊模塊?
2021-06-15 06:06:43
由10個(gè)字節(jié)存貯單元組成,存貯由微控制器寫(xiě),將被發(fā)送至CAN總線(xiàn)網(wǎng)絡(luò)的報(bào)文。接收緩存器0和1(RBF0、RBF1)均由10個(gè)字節(jié)組成,交替存貯從總線(xiàn)接收的報(bào)文,當(dāng)一個(gè)緩存器分配給CPU,位流處理器可以
2015-08-17 14:21:59
本文結(jié)合汽車(chē)車(chē)門(mén)控制模塊設(shè)計(jì)的項(xiàng)目實(shí)踐,介紹了一種基于智能功率芯片TLE7810的低成本電動(dòng)車(chē)窗硬件和軟件設(shè)計(jì),并對(duì)電動(dòng)車(chē)窗的防夾功能進(jìn)行了簡(jiǎn)單介紹。
2021-05-17 06:43:49
CAN總線(xiàn)的特點(diǎn)是什么?CAN總線(xiàn)在電動(dòng)汽車(chē)上的應(yīng)用是什么?怎么實(shí)現(xiàn)基于CAN總線(xiàn)的電動(dòng)汽車(chē)控制系統(tǒng)設(shè)計(jì)?
2021-05-17 07:07:31
電動(dòng)汽車(chē)能源管理的重要性是什么?怎么實(shí)現(xiàn)基于CAN總線(xiàn)的電動(dòng)汽車(chē)電源管理通信的設(shè)計(jì)?
2021-05-12 06:14:51
怎么實(shí)現(xiàn)基于DSP的電動(dòng)汽車(chē)CAN總線(xiàn)通訊技術(shù)設(shè)計(jì)?
2021-05-18 06:34:14
本文結(jié)合汽車(chē)車(chē)門(mén)控制模塊設(shè)計(jì)的項(xiàng)目實(shí)踐,重點(diǎn)介紹了電動(dòng)車(chē)窗部分的硬件和軟件設(shè)計(jì)。對(duì)智能功率芯片BTS7960在正常運(yùn)行時(shí)的啟動(dòng)特性及故障檢測(cè)特性進(jìn)行了研究與分析,并給出了試驗(yàn)結(jié)果。
2021-05-14 06:31:41
汽車(chē)車(chē)身傳感器
2012-08-20 22:02:52
汽車(chē)車(chē)身內(nèi)部布置方法研究與總結(jié)本文主要內(nèi)容是結(jié)合實(shí)際經(jīng)驗(yàn)(現(xiàn)有車(chē)型數(shù)據(jù)),運(yùn)用車(chē)身內(nèi)部布置設(shè)計(jì)的方法(借助于基于CATIA 軟件車(chē)身內(nèi)部布置系統(tǒng))詳細(xì)的闡述了車(chē)身內(nèi)部布置基本原理及過(guò)程。包括:駕駛員
2009-04-16 13:35:14
一、原料費(fèi)汽車(chē)車(chē)身模胚采用選材的不一樣的售價(jià)自然會(huì)存有很大的區(qū)別,采用汽車(chē)車(chē)身模胚的要求挑出適用于汽車(chē)車(chē)身模胚的選材,采用汽車(chē)車(chē)身模胚的質(zhì)量和選材計(jì)算汽車(chē)車(chē)身模胚在選材這方面的售價(jià),這個(gè)基本上能夠
2019-09-17 15:39:01
?Can-Bus總線(xiàn)技術(shù)是“控制器局域網(wǎng)總線(xiàn)技術(shù)(Controller Area Network-BUS)”的簡(jiǎn)稱(chēng),它具有極強(qiáng)的抗干擾和糾錯(cuò)能力,最早被用于飛機(jī)、坦克等武器電子系統(tǒng)的通訊聯(lián)絡(luò)上。通過(guò)遍布
2015-06-24 13:56:39
CAN總線(xiàn)測(cè)試內(nèi)容可以分為單節(jié)點(diǎn)測(cè)試和總線(xiàn)系統(tǒng)集成測(cè)試兩部分。在每個(gè)節(jié)點(diǎn)連接到CAN總線(xiàn)網(wǎng)絡(luò)之前都需要進(jìn)行單節(jié)點(diǎn)測(cè)試,用以確定節(jié)點(diǎn)工作正確并且不會(huì)干擾總線(xiàn)的正常通訊。總線(xiàn)系統(tǒng)集成測(cè)試則是將各個(gè)
2015-08-11 13:41:18
汽車(chē)車(chē)身網(wǎng)絡(luò)系統(tǒng)專(zhuān)家成都盤(pán)灃科技工程師介紹,由于CAN總線(xiàn)基本協(xié)議的靈活性,目前并沒(méi)有一個(gè)統(tǒng)一的完整覆蓋CAN總線(xiàn)各個(gè)通訊層次的測(cè)試規(guī)范,而作為CAN總線(xiàn)技術(shù)使用最廣泛的汽車(chē)行業(yè),各個(gè)汽車(chē)廠商也
2015-08-19 14:04:24
基于總線(xiàn)的網(wǎng)絡(luò)結(jié)構(gòu),可以達(dá)到信息共享、減少布線(xiàn)、降低成本以及提高總體可靠性的目的。通常的汽車(chē)網(wǎng)絡(luò)結(jié)構(gòu)采用多條不同速率的總線(xiàn)分別連接不同類(lèi)型的節(jié)點(diǎn),并使用網(wǎng)關(guān)服務(wù)器來(lái)實(shí)現(xiàn)整車(chē)的信息共享和網(wǎng)絡(luò)管理。
車(chē)身
2015-07-08 13:49:34
我國(guó)的汽車(chē)CAN總線(xiàn)技術(shù)起步較晚,但隨著現(xiàn)代汽車(chē)電子的不斷進(jìn)步發(fā)展,其研究和應(yīng)用正如火如荼的進(jìn)行中。CAN總線(xiàn)是一種串行多主站控制器局域網(wǎng)總線(xiàn),是一種有效支持分布式控制或?qū)崟r(shí)控制的串性通訊網(wǎng)絡(luò)
2015-08-18 14:10:28
請(qǐng)點(diǎn)擊彩色方框查看或申請(qǐng)推薦的解決方案。 德州儀器 (TI) 的汽車(chē)車(chē)身控制器解決方案設(shè)計(jì)注意事項(xiàng):汽車(chē)車(chē)身控制器用于監(jiān)視和控制與車(chē)身(例如車(chē)燈、車(chē)窗、門(mén)鎖)相關(guān)的功能并像 CAN 和 LIN 網(wǎng)絡(luò)
2012-12-10 10:15:50
混合動(dòng)力電動(dòng)汽車(chē)CAN總線(xiàn)開(kāi)發(fā)實(shí)踐摘要:在對(duì)CAN總線(xiàn)技術(shù)以及混合動(dòng)力汽車(chē)的結(jié)構(gòu)原理進(jìn)行分析的基礎(chǔ)上,研究了混合動(dòng)力電動(dòng)汽車(chē)基于CAN總線(xiàn)的控制系統(tǒng)的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)。根據(jù)CAN節(jié)點(diǎn)系統(tǒng)結(jié)構(gòu)框圖,完成
2009-11-26 17:18:58
公司想為電動(dòng)車(chē)做一款產(chǎn)品,可以遠(yuǎn)程控制電動(dòng)車(chē)開(kāi)關(guān),用GSM通訊,可以上報(bào)電池電量,位置等信息,一看自己做,成本又高,耗時(shí)又長(zhǎng),大家有沒(méi)有什么好的解決辦法?
2016-11-16 16:04:32
怎樣去設(shè)計(jì)一種基于CAN總線(xiàn)的并聯(lián)式混合動(dòng)力電動(dòng)車(chē)控制系統(tǒng)?并聯(lián)式混合動(dòng)力電動(dòng)車(chē)控制系統(tǒng)有哪些應(yīng)用?并聯(lián)式混合動(dòng)力電動(dòng)車(chē)控制系統(tǒng)的通訊管理是怎樣的?
2021-07-01 09:24:21
控制系統(tǒng)的一個(gè)重要發(fā)展方向現(xiàn)場(chǎng)總線(xiàn)控制系統(tǒng)就是其中的一種典型的控制網(wǎng)絡(luò)結(jié)構(gòu)的實(shí)現(xiàn)CAN屬于現(xiàn)場(chǎng)總線(xiàn)的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的多主串行總線(xiàn),以其短報(bào)文幀和優(yōu)異的CSMA/BA逐位仲裁
2015-08-18 13:52:36
【眾想】大黃蜂STM32視頻教程----劉洋邊講邊寫(xiě)基礎(chǔ)篇 ----CAN總線(xiàn)通訊實(shí)驗(yàn)(上)http://www.stmcu.org/module/forum/thread-606891-1-1.html
2016-07-19 11:46:26
【眾想】大黃蜂STM32視頻教程----劉洋邊講邊寫(xiě)基礎(chǔ)篇 --CAN總線(xiàn)通訊實(shí)驗(yàn)(下)http://www.stmcu.org/module/forum/thread-606892-1-1.html
2016-07-19 11:47:02
辰漢---MH-C9500AT1 低速電動(dòng)車(chē)MP5 隨著國(guó)家對(duì)節(jié)能環(huán)保型經(jīng)濟(jì)的提出,電動(dòng)汽車(chē)市場(chǎng)2015年進(jìn)入爆發(fā)期,隨之發(fā)展迅速的是低速電動(dòng)車(chē)。低速電動(dòng)車(chē)車(chē)身尺寸小、車(chē)身重量輕、最高時(shí)速低等
2017-08-10 15:11:09
辰漢電子MH-T671AT1低速電動(dòng)車(chē)車(chē)規(guī)級(jí)中控(iMX6Q+7寸) New隨著國(guó)家對(duì)節(jié)能環(huán)保型經(jīng)濟(jì)的提出,電動(dòng)汽車(chē)市場(chǎng)2015年進(jìn)入爆發(fā)期,隨之發(fā)展迅速的是低速電動(dòng)車(chē)。MH-T671AT1低速
2018-07-11 17:11:56
在研究CAN 協(xié)議的原理及應(yīng)用技術(shù)的基礎(chǔ)上,為了滿(mǎn)足混合動(dòng)力電動(dòng)車(chē)控制策略的需要,針對(duì)混合動(dòng)力電動(dòng)車(chē)的特點(diǎn),設(shè)計(jì)了新的CAN總線(xiàn)應(yīng)用層協(xié)議。該協(xié)議對(duì)網(wǎng)絡(luò)信息進(jìn)行了分類(lèi)
2009-04-20 08:53:37 30
30 研究C A N 總線(xiàn)和多主機(jī)控制在汽車(chē)白車(chē)身視覺(jué)監(jiān)測(cè)站中的應(yīng)用; 提出以采用摩托羅拉MC68HC05X16和微機(jī)為主機(jī)的多主機(jī)分布式控制系統(tǒng);介紹控制網(wǎng)絡(luò)的物理層接口及有關(guān)硬件, 并
2009-05-13 16:15:5419 本文研究 CAN 總線(xiàn)在電梯串行通訊中的應(yīng)用。論文對(duì)比RS-485 通訊方式,分析CAN 總線(xiàn)應(yīng)用于電梯串行通訊中的優(yōu)點(diǎn),采用SJA1000 設(shè)計(jì)了CAN 總線(xiàn)通訊硬件,優(yōu)化CAN總線(xiàn)的通信參數(shù),提高
2009-06-25 13:28:0327 介紹客車(chē)車(chē)身三維建模的方法及常用軟件, 用實(shí)例說(shuō)明客車(chē)車(chē)身三維實(shí)體建模的過(guò)程。關(guān)鍵詞: 客車(chē)車(chē)身 實(shí)體 三維建模Abstract: Th is paper introducesmethods and common softw ares of the 3D
2009-07-25 09:44:2929 提出一種基于U G 軟件的客車(chē)車(chē)身設(shè)計(jì)方法, 以有效地縮短設(shè)計(jì)周期、減小設(shè)計(jì)誤差、降低開(kāi)發(fā)成本。關(guān)鍵詞: 客車(chē)車(chē)身; 設(shè)計(jì); 數(shù)字模型; 骨架;U G 軟件Abstract: A design method based on
2009-07-27 14:07:3624 本文首先分析了國(guó)際上幾種主要的液壓支架電液控制系統(tǒng)的通訊實(shí)現(xiàn)方法,指出原有方法中存在的不足。采用了CAN 總線(xiàn)實(shí)現(xiàn)綜采面支架控制器的互連。針對(duì)煤礦對(duì)現(xiàn)場(chǎng)總線(xiàn)本質(zhì)安
2009-08-11 10:40:0713 研發(fā)了基于CAN 總線(xiàn)的新型機(jī)器人示教盒系統(tǒng),采用ARM 芯片為核心,并在其上運(yùn)行了實(shí)時(shí)操作系統(tǒng)μC/OS-II。設(shè)計(jì)了一套CAN 網(wǎng)絡(luò)通訊協(xié)議,實(shí)現(xiàn)了
2009-09-09 09:35:1323 本文首先簡(jiǎn)要介紹了CAN 總線(xiàn)的技術(shù)特點(diǎn),同時(shí)把針對(duì)電動(dòng)汽車(chē)的特點(diǎn),建立車(chē)身網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)。詳細(xì)的介紹了CAN 通訊協(xié)議準(zhǔn)的拓?fù)浣Y(jié),制定了CAN 總線(xiàn)應(yīng)用層協(xié)議的通訊報(bào)文形式
2010-01-07 14:47:0660 智能電動(dòng)執(zhí)行機(jī)構(gòu)實(shí)現(xiàn)遠(yuǎn)程監(jiān)控是目前研究的熱點(diǎn)。本文介紹了基于CAN總線(xiàn)通訊的智能電動(dòng)執(zhí)行機(jī)構(gòu)的設(shè)計(jì)思路及實(shí)現(xiàn)方法,具體介紹了電動(dòng)執(zhí)行機(jī)構(gòu)的控制電路、驅(qū)動(dòng)電路及CAN總線(xiàn)
2010-02-21 14:18:5725 一、方案名稱(chēng):寬壓12-100V電動(dòng)車(chē)車(chē)充供電應(yīng)用方案H6215L二.方案品牌:惠海半導(dǎo)體三.方案概述:電動(dòng)車(chē)依其便捷環(huán)保和高性?xún)r(jià)比的特點(diǎn),成為越來(lái)越多人出行的重要交通工具。而在出行途中我們常常
2023-06-16 10:07:23
對(duì)CAN(Controller Area Network)/LIN(Local Interconnect Network)總線(xiàn)做了詳細(xì)介紹,設(shè)計(jì)了汽車(chē)CAN節(jié)點(diǎn)、LIN節(jié)點(diǎn)硬件電路,完成了CAN/LIN網(wǎng)關(guān)的硬件設(shè)計(jì),LIN設(shè)計(jì)目標(biāo)作為CAN的下層網(wǎng)絡(luò),同CAN相結(jié)合構(gòu)成汽
2010-07-13 17:10:3113 PC機(jī)并口與現(xiàn)場(chǎng)總線(xiàn)CAN通訊的實(shí)現(xiàn)
以PC機(jī)并口與CAN通訊為例,通過(guò)電路與程序?qū)嵗唧w介紹了通過(guò)并口EPP協(xié)議與CAN轉(zhuǎn)換的實(shí)現(xiàn)。 關(guān)鍵詞:現(xiàn)場(chǎng)
2009-10-16 17:53:32 1735
1735 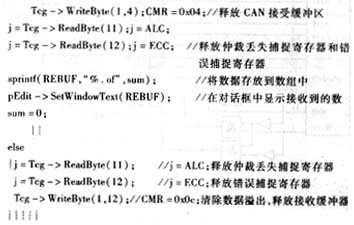
基于DSP的電動(dòng)汽車(chē)CAN總線(xiàn)通訊技術(shù)設(shè)計(jì)
德國(guó)Bosch公司為了解決現(xiàn)代車(chē)輛中眾多的控制和數(shù)據(jù)交換問(wèn)題,開(kāi)發(fā)出一種CAN(Controller AreaNetwork) 現(xiàn)場(chǎng)總線(xiàn)通訊結(jié)構(gòu). CAN
2009-12-23 10:51:43833 
總線(xiàn)式車(chē)身控制系統(tǒng)的規(guī)則化建模技術(shù)
一、前言
汽車(chē)車(chē)身上安裝的電子器件和設(shè)備不斷增多,例如:電動(dòng)座椅、電動(dòng)門(mén)
2010-03-11 10:40:47521 基于CAN/LIN總線(xiàn)的車(chē)身網(wǎng)絡(luò)中央控制器設(shè)計(jì)
?1 前言
??? 隨著對(duì)車(chē)輛舒適性要求的提高和更多輔助智能功能的出現(xiàn),ECU單元
2010-03-11 15:45:20712 四輪獨(dú)立驅(qū)動(dòng)電動(dòng)車(chē)高速CAN網(wǎng)絡(luò)數(shù)據(jù)分析技術(shù)
伴隨著電動(dòng)汽車(chē)的發(fā)展,CAN總線(xiàn)通訊技術(shù)應(yīng)用越來(lái)越廣泛,它可為純電動(dòng)汽車(chē)上四輪獨(dú)立驅(qū)動(dòng)控制,
2010-05-08 08:37:191393 
1 引言汽車(chē)總線(xiàn)技術(shù)是現(xiàn)場(chǎng)總線(xiàn)的應(yīng)用之一,最初現(xiàn)場(chǎng)總線(xiàn)只用于工業(yè)控制。所謂現(xiàn)場(chǎng)總線(xiàn)是應(yīng)用在生產(chǎn)最底層的一種總線(xiàn)型拓?fù)?b class="flag-6" style="color: red">網(wǎng)絡(luò)。汽車(chē)車(chē)身控制網(wǎng)絡(luò)目前要解決的問(wèn)題
2010-07-20 09:14:562657 
信息顯示故障再現(xiàn)是電動(dòng)車(chē)輛的開(kāi)發(fā)過(guò)程中一個(gè)重要的研究課題$ 顯示終端和信號(hào)采集前端的通訊實(shí)現(xiàn)是這個(gè)課題的一個(gè)重要研究技術(shù)$ 結(jié)合采用聯(lián)想電腦天璣5000S和嵌入式操作系統(tǒng)WIN
2011-06-27 16:30:2326 信息顯示,故障再現(xiàn)是電動(dòng)車(chē)輛的開(kāi)發(fā)過(guò)程中一個(gè)重要的研究課題。顯示終端和信號(hào)采集前端的通訊實(shí)現(xiàn)是這個(gè)課題的一個(gè)重要研究技術(shù)。結(jié)合采用聯(lián)想電腦天璣和嵌入式操作系統(tǒng)Windows CE開(kāi)發(fā)而成的電動(dòng)車(chē)輛信息終端,介紹一種簡(jiǎn)單、高效信息終端的通訊實(shí)現(xiàn)方法。
2016-04-18 14:12:305 電動(dòng)車(chē)車(chē)蹺蹺板源程序工程,感興趣的小伙伴們可以瞧一瞧。
2016-11-22 18:00:476 一個(gè)CAN通訊口,通過(guò)這些通訊口與各個(gè)CAN節(jié)點(diǎn)進(jìn)行通訊,從而達(dá)到溝通的效果,但是在接收端,會(huì)以局域網(wǎng)的形式進(jìn)行接收,所以期間必須達(dá)成一個(gè)總線(xiàn)網(wǎng)絡(luò)轉(zhuǎn)換,CAN總線(xiàn)網(wǎng)絡(luò)轉(zhuǎn)換成以太網(wǎng),就會(huì)用到CPCI接口CAN卡。
2016-12-29 10:12:532629 CAN總線(xiàn)工作原理
2017-02-28 21:02:5719 CAN總線(xiàn)通訊
2017-02-28 21:02:1024 礦用通風(fēng)機(jī)監(jiān)測(cè)系統(tǒng)設(shè)計(jì)及通訊實(shí)現(xiàn)_付勝
2017-03-15 08:00:000 臨震電磁信息監(jiān)測(cè)儀網(wǎng)絡(luò)通訊實(shí)現(xiàn)_瞿旻
2017-03-15 08:00:000 車(chē)身輕量化、電池輕量化、電驅(qū)傳動(dòng)總成輕量化和零部件輕量化四個(gè)方面。如下圖所示。 本期周報(bào)將著重介紹實(shí)現(xiàn)車(chē)身輕量化目標(biāo)的三大技術(shù)途徑,并對(duì)低速電動(dòng)車(chē)的輕量化車(chē)身結(jié)構(gòu)發(fā)展趨勢(shì)進(jìn)行探討。低速電動(dòng)車(chē)車(chē)身輕量化主要通
2017-09-21 15:23:391 字電機(jī)伺服驅(qū)動(dòng)系統(tǒng),使用CANopen通訊協(xié)議實(shí)現(xiàn)了CAN總線(xiàn)數(shù)字信號(hào)處理器(DSP)系統(tǒng)與上位機(jī)CAN卡之間的通訊,并通過(guò)測(cè)試實(shí)驗(yàn)驗(yàn)證了信息傳遞的可靠性,保證了全數(shù)字網(wǎng)絡(luò)化伺服驅(qū)動(dòng)系統(tǒng)中對(duì)電機(jī)控制的快速性、準(zhǔn)確性和實(shí)時(shí)性。 2 通訊系統(tǒng)實(shí)現(xiàn)的基本原理 2.1 LF240x系
2017-10-31 11:00:5816 性和性能價(jià)格比。 CAN總線(xiàn)能夠滿(mǎn)足現(xiàn)代自動(dòng)化通訊的需要,已成為工業(yè)數(shù)據(jù)總線(xiàn)通訊領(lǐng)域中最為活要躍的一支。 其主要特點(diǎn)是: ①CAN總線(xiàn)為多主站總線(xiàn),各節(jié)點(diǎn)均可在任意時(shí)刻主動(dòng)向網(wǎng)絡(luò)上的其它節(jié)點(diǎn)發(fā)送信息,不分主從,通信靈活; ②CAN總線(xiàn)采用獨(dú)特的非破壞性總線(xiàn)仲裁技術(shù),優(yōu)先級(jí)高的
2017-10-31 16:16:348 有關(guān)CAN總線(xiàn)在汽車(chē)電子系統(tǒng)中的應(yīng)用和電動(dòng)車(chē)窗防夾方案的基礎(chǔ)上,提出一種基于CAN總線(xiàn)的轎車(chē)車(chē)窗智能控制系統(tǒng)的設(shè)計(jì)方案,實(shí)現(xiàn)車(chē)窗在正常工作模式下防夾控制功能和緊急情況下(異常工作模式)快速升降車(chē)窗控制功能。 目前,
2017-11-21 10:37:0921 性和性能價(jià)格比。 CAN總線(xiàn)能夠滿(mǎn)足現(xiàn)代自動(dòng)化通訊的需要,已成為工業(yè)數(shù)據(jù)總線(xiàn)通訊領(lǐng)域中最為活要躍的一支。 其主要特點(diǎn)是: ①CAN總線(xiàn)為多主站總線(xiàn),各節(jié)點(diǎn)均可在任意時(shí)刻主動(dòng)向網(wǎng)絡(luò)上的其它節(jié)點(diǎn)發(fā)送信息,不分主從,通信靈活; ②CAN總線(xiàn)采用獨(dú)特的非破壞性總線(xiàn)仲裁技術(shù),優(yōu)先級(jí)高的
2017-11-27 11:09:550 純電動(dòng)汽車(chē)系統(tǒng)包括電池及其管理系統(tǒng)、電機(jī)及其控制系統(tǒng)、充電機(jī)的信號(hào)監(jiān)控、信號(hào)檢測(cè)與控制系統(tǒng)等,電動(dòng)車(chē)還要求與車(chē)輛調(diào)度系統(tǒng)通訊,實(shí)時(shí)將車(chē)輛的位置、剩余電量等數(shù)據(jù)傳送到調(diào)度中心,甚至還要求將電動(dòng)車(chē)的各種
2020-03-18 08:10:001821 
汽車(chē)總線(xiàn)技術(shù)是現(xiàn)場(chǎng)總線(xiàn)的應(yīng)用之一,最初現(xiàn)場(chǎng)總線(xiàn)只用于工業(yè)控制。所謂現(xiàn)場(chǎng)總線(xiàn)是應(yīng)用在生產(chǎn)最底層的一種總線(xiàn)型拓?fù)?b class="flag-6" style="color: red">網(wǎng)絡(luò)。汽車(chē)車(chē)身控制網(wǎng)絡(luò)目前要解決的問(wèn)題就是建立一個(gè)統(tǒng)一、低成本的低端通訊網(wǎng)絡(luò)標(biāo)準(zhǔn),LIN作為CAN的輔助總線(xiàn)而存在,實(shí)現(xiàn)車(chē)身控制網(wǎng)絡(luò)的層次化,以更低的成本實(shí)現(xiàn)車(chē)身控制網(wǎng)絡(luò)。
2021-04-06 13:36:503214 
兩個(gè)S7-200-PLC之間Modbus通訊實(shí)現(xiàn)(從站)方法。
2021-04-25 11:24:1628 CAN 通訊實(shí)驗(yàn)CAN 介紹CAN 總線(xiàn)介紹CAN 是Controller Area Network 的縮寫(xiě)(以下稱(chēng)為CAN),中文意思是控制器局域網(wǎng)絡(luò),是ISO 國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議
2021-12-04 20:21:0924 目錄CAN協(xié)議介紹物理層閉環(huán)總線(xiàn)網(wǎng)絡(luò)開(kāi)環(huán)總線(xiàn)網(wǎng)絡(luò)通訊節(jié)點(diǎn)差分信號(hào)協(xié)議層簡(jiǎn)介CAN的波特率位時(shí)序幀類(lèi)型、作用及格式數(shù)據(jù)幀STM32CAN外設(shè)CAN 發(fā)送郵箱CAN 接收 FIFO有效消息接收處理
2021-12-24 19:04:1523 can總線(xiàn)通訊卡,一般是指我們平時(shí)進(jìn)行汽車(chē)CAN總線(xiàn)調(diào)試的USBCAN分析儀,它是我們進(jìn)行目標(biāo)CAN設(shè)備CAN總線(xiàn)研究的基礎(chǔ)工具。根據(jù)設(shè)計(jì)的不同,其可分為單通道版本,雙通道版本以及多通道版本
2022-01-27 09:48:273148 是自主研發(fā)的一款 ETHERCAT 從站功能的通訊網(wǎng)關(guān)。該產(chǎn)品主要功能是將各種 CAN 總線(xiàn)和 ETHERCAT 網(wǎng)絡(luò)連接起來(lái)。
2023-07-06 09:55:58515 
是自主研發(fā)的一款 ETHERCAT 從站功能的通訊網(wǎng)關(guān)。該產(chǎn)品主要功能是將各種 CAN 總線(xiàn)和 ETHERCAT 網(wǎng)絡(luò)連接起來(lái)。
2023-10-31 18:30:00437 
技術(shù),CAN總線(xiàn)能夠實(shí)現(xiàn)穩(wěn)定通信,適應(yīng)長(zhǎng)距離傳輸和嘈雜環(huán)境的要求。MiniCANUnitMiniCANUnit是一款小型CAN總線(xiàn)通訊單元,采用了TJA1051T
2024-02-19 12:47:1979 
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論